純電動(dòng)汽車再生制動(dòng)控制策略研究
2016-06-20 08:52:39惠登峰江蘇省鎮(zhèn)江市路橋工程總公司江蘇鎮(zhèn)江212017
汽車實(shí)用技術(shù) 2016年5期
關(guān)鍵詞:控制策略
惠登峰(江蘇省鎮(zhèn)江市路橋工程總公司,江蘇 鎮(zhèn)江 212017)
?
純電動(dòng)汽車再生制動(dòng)控制策略研究
惠登峰
(江蘇省鎮(zhèn)江市路橋工程總公司,江蘇 鎮(zhèn)江 212017)
摘要:基于傳統(tǒng)再生制動(dòng)控制策略和制動(dòng)穩(wěn)定性,提出了一種適用于純電動(dòng)汽車的再生制動(dòng)復(fù)合控制策略。采用Matlab/simulink和Carsim 軟件在FTP75標(biāo)準(zhǔn)工況下進(jìn)行聯(lián)合仿真,與傳統(tǒng)并聯(lián)再生制動(dòng)控制策略的仿真結(jié)果進(jìn)行分析比較。結(jié)果表明:所提出的再生制動(dòng)復(fù)合控制策略在保證制動(dòng)穩(wěn)定性的前提下,能回收更多能量,增加續(xù)駛里程,明顯優(yōu)于傳統(tǒng)并聯(lián)再生制動(dòng)控制策略。
關(guān)鍵詞:再生制動(dòng);聯(lián)合仿真;控制策略;純電動(dòng)汽車
10.16638/j.cnki.1671-7988.2016.05.033
CLC NO.: U469.7Document Code: AArticle ID: 1671-7988 (2016)05-136-04
前言
傳統(tǒng)汽車所帶來的空氣污染日益加重和石油短缺問題,日益得到了人們的重視[1]。為解決節(jié)能和環(huán)保的問題,國(guó)家大力支持電動(dòng)汽車的發(fā)展。電動(dòng)汽車具有能量來源可持續(xù)、零排放、低噪音等優(yōu)勢(shì),因而被認(rèn)為是傳統(tǒng)車輛的理想替代品[2]。同時(shí),電動(dòng)汽車通過自身的驅(qū)動(dòng)電機(jī),可以方便地實(shí)現(xiàn)再生制動(dòng)能量回收。
續(xù)航歷程短一直是制約電動(dòng)汽車普及發(fā)展的關(guān)鍵因素。再生制動(dòng)能量回收技術(shù)是提高電動(dòng)車?yán)m(xù)航里程的有效手段[3]。再生制動(dòng)能量回收就是在汽車制動(dòng)時(shí),通過將電動(dòng)機(jī)作為發(fā)電機(jī)使用,把車輛動(dòng)能轉(zhuǎn)化為電能儲(chǔ)存在動(dòng)力電池、超級(jí)電容等儲(chǔ)能設(shè)備中,供驅(qū)動(dòng)時(shí)使用,以達(dá)到延長(zhǎng)電動(dòng)汽車?yán)m(xù)駛里程的目的,同時(shí)還可起到減少制動(dòng)器工作強(qiáng)度、延長(zhǎng)機(jī)械制動(dòng)系統(tǒng)壽命的作用。
因?yàn)榫邆渖鲜鰞?yōu)點(diǎn),再生制動(dòng)能量回收技術(shù)已成為純電動(dòng)汽車和燃料電池汽車等新能源汽車節(jié)能減排的主要技術(shù)之一。本文針對(duì)純電動(dòng)汽車的制動(dòng)系統(tǒng)進(jìn)行分析,提出了適用于純電動(dòng)汽車的復(fù)合再生制動(dòng)能量回收策略,并對(duì)該策略進(jìn)行了仿真分析。
1、汽車制動(dòng)受力分析
把整車看作一個(gè)剛體,當(dāng)汽車沿水平路面進(jìn)行制動(dòng)時(shí),受力情況如圖1所示。在純電動(dòng)汽車特點(diǎn)的基礎(chǔ)上,對(duì)整車模型提出如下假設(shè)和簡(jiǎn)化[4]:
視整車為剛體,假設(shè)在絕對(duì)平坦的水平路面上行駛,忽略懸架系統(tǒng)、簧上質(zhì)量與簧下質(zhì)量間的相互影響。
(2)忽略輪轂電機(jī)在驅(qū)動(dòng)和制動(dòng)時(shí)可能產(chǎn)生的轉(zhuǎn)矩脈動(dòng)所帶來的影響。
(3)忽略汽車行駛時(shí)的空氣阻力、輪胎滾動(dòng)阻力以及車輪轉(zhuǎn)動(dòng)慣量在制動(dòng)時(shí)的影響。
(4)假設(shè)制動(dòng)時(shí)車輪不會(huì)滑移。
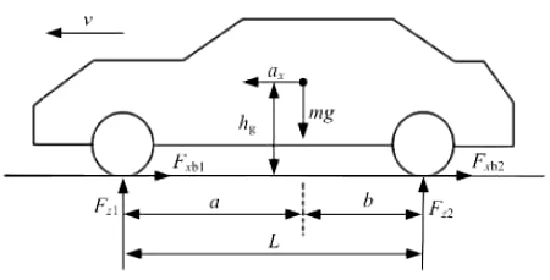
圖1 整車制動(dòng)受力模型
圖1中,L 為軸距,a為車輛質(zhì)心至前軸中心線的距離,b為車輛質(zhì)心至后軸中心線的距離,L=a+b。hg為車輛質(zhì)心高度。FXb1、FXb2分別為前后車輪的總制動(dòng)力,對(duì)于電動(dòng)輪汽車有:

式中:FXbr1、FXbr2分別為前后軸的再生制動(dòng)力;FXbrm1、FXbrm2分別為前后軸的機(jī)械制動(dòng)力。
分別對(duì)前輪接地點(diǎn)、后輪接地點(diǎn)取力矩,得:





在任何附著系數(shù)φ的路面上,前、后車輪同時(shí)抱死的條件是:前、后軸制動(dòng)力之和等于總附著力,并且前、后車輪制動(dòng)力分別等于各自的附著力[4],數(shù)學(xué)表達(dá)式如下:

聯(lián)立式(7)~(11)可得前、后車輪同時(shí)抱死時(shí)軸間制動(dòng)力分配關(guān)系:

式(12)即為理想的前、后輪制動(dòng)力分配曲線。
2、典型再生制動(dòng)控制策略
純電動(dòng)汽車制動(dòng)控制的總體目標(biāo)是:在保證整車制動(dòng)性能的前提下,使能量回收到最大。具體到實(shí)際結(jié)構(gòu),就是必須考慮到駕駛員的制動(dòng)需要、電動(dòng)機(jī)所能提供的最大功率和能量?jī)?chǔ)存裝置的充電限制等因素,并結(jié)合控制的難易程度及成本,制定電動(dòng)機(jī)進(jìn)行再生制動(dòng)的方法,同時(shí)控制策略應(yīng)與ABS、ESP等系統(tǒng)相融合,不影響其性能[5]。
2.1最大回饋功率制動(dòng)
最大回饋功率制動(dòng)是以制動(dòng)過程中盡可能多地回收能量為目的。通過對(duì)制動(dòng)過程中電樞電流控制,使回收功率達(dá)到最大。最大回饋功率制動(dòng)多用于電力機(jī)車,因?yàn)闄C(jī)車直接從電網(wǎng)取電,回饋電流的大小對(duì)電網(wǎng)的影響不大。此控制策略也可用于電動(dòng)自行車和電動(dòng)三輪車等功率較小的場(chǎng)合,因?yàn)檫@些電動(dòng)機(jī)功率較小且電樞電阻較大,因而不會(huì)產(chǎn)生過大的電樞電流和充電電流,但有如下缺點(diǎn):
(1)采用這種制動(dòng)方式時(shí),由于電樞電阻小,因而即使在電動(dòng)機(jī)轉(zhuǎn)速很低時(shí),也會(huì)產(chǎn)生過大的電樞電流和蓄電池充電電流。
(2)當(dāng)純電動(dòng)汽車采用最大回饋功率方式制動(dòng)時(shí),電動(dòng)機(jī)轉(zhuǎn)速將按指數(shù)規(guī)律下降,這不符合駕駛員的操作特性。
所以,將最大回饋功率制動(dòng)應(yīng)用于電動(dòng)車,必須處理好過大充電電流的安全問題,以及由此造成的對(duì)電源系統(tǒng)壽命的影響。
2.2最大回饋效率制動(dòng)
最大回饋效率制動(dòng)是以制動(dòng)過程中回饋效率最大為目的,回饋的能量最多,制動(dòng)距離最長(zhǎng),制動(dòng)的過程中,車速按照拋物線規(guī)律下降。但是這種方式需要控制電樞電流,要實(shí)時(shí)檢測(cè)汽車的阻力,因而增加了控制的不確定性,實(shí)現(xiàn)起來的難度較大。
2.3恒定力矩制動(dòng)
對(duì)永磁直流電機(jī),恒定力矩制動(dòng)等價(jià)于恒定電樞電流制動(dòng)。此策略通過在不同踏板開度時(shí)對(duì)電樞電流進(jìn)行控制,恒定力矩制動(dòng)能夠?qū)崿F(xiàn)制動(dòng)力矩和踏板開度的同步增大,這與傳統(tǒng)汽車液壓制動(dòng)系統(tǒng)不同踏板開度對(duì)應(yīng)不同制動(dòng)力矩相同,車速線性下降,也符合駕駛員的操作習(xí)慣,控制方便,所以此策略具有一定的優(yōu)越性[4]。
為了保證蓄電池的安全充電,對(duì)蓄電池的充電電流不能超過其最大充電電流,這就限制了所采用的恒定電樞電流的大小,而且在踏板開度一定的情況下,隨電機(jī)轉(zhuǎn)速的下降,雖然電樞電流保持恒定,但充電電流持續(xù)減小。因此,該策略不能有效地回收能量。
2.4恒定充電電流制動(dòng)
為了避免過大的回饋電流對(duì)蓄電池造成傷害,文獻(xiàn)[6]提出了恒定電流制動(dòng)方式,即以蓄電池充電電流為被控制對(duì)象,在車輛制動(dòng)過程中,控制系統(tǒng)維持蓄電池充電電流不變,兼顧能量回收與系統(tǒng)保護(hù),是一種更實(shí)用的控制策略。
但是由于隨著車速的降低,電樞電流持續(xù)上升,因而有可能超過電樞允許的最大電流,所以必須對(duì)充電電流的大小加以限制。當(dāng)制動(dòng)踏板開度與充電電流相對(duì)應(yīng)時(shí),在相同的踏板開度下,隨著車速的下降,汽車將獲得逐漸增加的制動(dòng)力,這種現(xiàn)象不符合駕駛?cè)说牟僮髁?xí)慣。
3、再生制動(dòng)復(fù)合控制策略
本文針對(duì)超級(jí)電容—蓄電池復(fù)合電源純電動(dòng)汽車進(jìn)行了研究。總體的控制思想是,在制動(dòng)意圖的控制下,依據(jù)I曲線進(jìn)行制動(dòng)力分配,提高制動(dòng)能量回收率的同時(shí)保證制動(dòng)穩(wěn)定性,低制動(dòng)強(qiáng)度采用電機(jī)制動(dòng),中強(qiáng)度制動(dòng)協(xié)調(diào)再生制動(dòng)與機(jī)械制動(dòng)一同工作,高制動(dòng)強(qiáng)度只有機(jī)械制動(dòng)力工作。
基于復(fù)合電源系統(tǒng)純電動(dòng)汽車儲(chǔ)能系統(tǒng)的特點(diǎn),綜合典型再生制動(dòng)控制策略,本文提出依據(jù)減速踏板位移行程,使用模糊控制識(shí)別駕駛員的制動(dòng)意圖,對(duì)再生制動(dòng)復(fù)合控制策略進(jìn)行優(yōu)化。
制動(dòng)踏板位移反映了駕駛員的制動(dòng)意圖,使用Matlab提供的模糊工具箱設(shè)計(jì)制動(dòng)意圖識(shí)別控制器,對(duì)模糊輸入?yún)?shù)進(jìn)行歸一化處理,使輸入分量在[0,1]范圍變化,參數(shù)閾值和制動(dòng)強(qiáng)度分配如表1所示,圖2為純電動(dòng)汽車制動(dòng)系統(tǒng)控制流程。
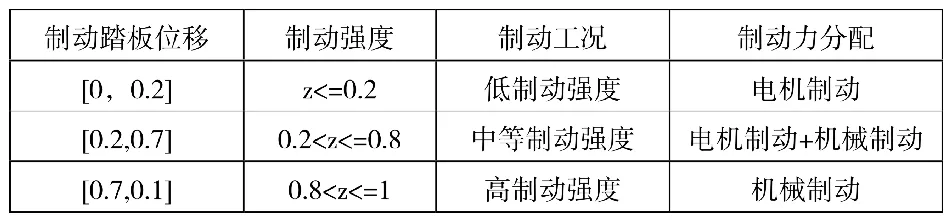
表1 制動(dòng)強(qiáng)度分配表
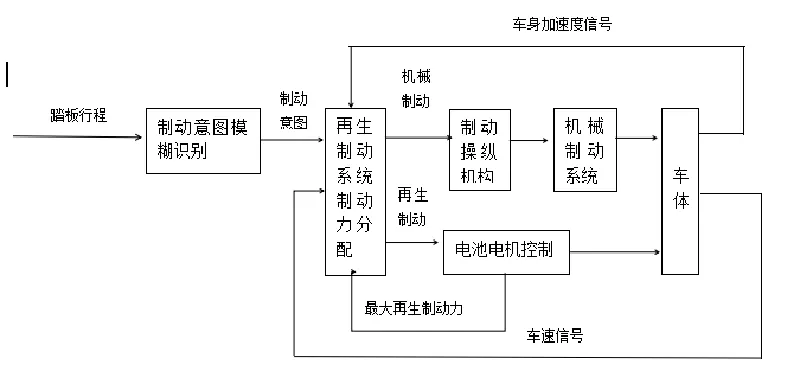
圖2 純電動(dòng)汽車制動(dòng)系統(tǒng)控制流程
4、模型建立及仿真
4.1模型建立
本文采用Matlab/simulink和Carsim進(jìn)行聯(lián)合仿真,在Carsim中建立整車模型,在simulink下搭建再生制動(dòng)復(fù)合控制策略模型。模型中的電池、電機(jī)子模型采用查表的方式建立,相關(guān)性能數(shù)據(jù)由實(shí)驗(yàn)獲得,該方法建立的模型使得仿真結(jié)果更接近于實(shí)際[7]。分別采用再生制動(dòng)復(fù)合控制策略和傳統(tǒng)并行再生制動(dòng)控制策略進(jìn)行仿真。仿真工況采用FTP75標(biāo)準(zhǔn)工況,假定汽車初始狀態(tài)SOC=80%,終了狀態(tài)SOC=20%。其它各模型參數(shù)如表2所示。

表2 仿真參數(shù)
4.2仿真結(jié)果分析
按照前面制定的再生制動(dòng)復(fù)合控制策略以及仿真模型,采用FTP75標(biāo)準(zhǔn)工況進(jìn)行了A、B車型的仿真對(duì)比。仿真的結(jié)果分別如圖3、圖4所示。

圖3 FTP75工況下里程(純電動(dòng)汽車模型A)
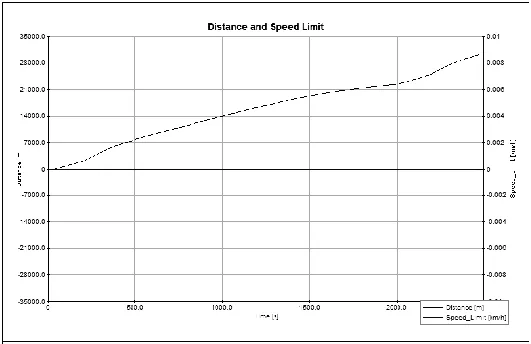
圖4 FTP75工況下里程(純電動(dòng)汽車模型B)

表3 仿真結(jié)果比較
圖3是沒有使用再生制動(dòng)復(fù)合控制策略模型的仿真結(jié)果,圖4是使用再生制動(dòng)復(fù)合控制策略模型的仿真結(jié)果。可以明顯看出,加入復(fù)合再生制動(dòng)控制策略后,純電動(dòng)汽車運(yùn)行過程中車速變化更加平穩(wěn),整體穩(wěn)定性較好。
表3是A、B純電動(dòng)汽車模型仿真結(jié)果對(duì)比。從表中可以看出,加制動(dòng)能量回收之前,在FTP75工況下,A汽車模型的續(xù)駛里程為17.78 km。加再生制動(dòng)能量回收復(fù)合控制策略的B純電動(dòng)汽車模型,同樣的條件下續(xù)駛里程為30.27km,比A純電動(dòng)汽車模型多行駛約60%里程。
5、結(jié)論
本文提出了適用于純電動(dòng)汽車的再生制動(dòng)復(fù)合控制策略,通過對(duì)純電動(dòng)汽車模型進(jìn)行仿真,驗(yàn)證了其較使用傳統(tǒng)再生制動(dòng)控制策略的純電動(dòng)汽車在能量回收方面具有很大優(yōu)勢(shì),能有效地增加續(xù)駛里程,在節(jié)能和行駛穩(wěn)定性方面優(yōu)勢(shì)明顯,是比較理想的純電動(dòng)汽車再生制動(dòng)控制策略。
參考文獻(xiàn)
[1]林程,王硯生,孟祥峰. 奧運(yùn)純電動(dòng)大客車技術(shù)與應(yīng)用[M].北京:北京理工大學(xué)出版社,2001:2-3.
[2]陳清泉,詹宜巨. 21世紀(jì)的綠色交通工具—電動(dòng)車[M].北京:清華大學(xué)出版社,2000:5-6.
[3]葉敏,郭金剛. 電動(dòng)汽車再生制動(dòng)及其控制技術(shù)[M].北京:人民交通出版社,2013:7-8.
[4]余志生. 汽車?yán)碚揫M].第4版.北京:機(jī)械工業(yè)出版社,2006: 108-109.
[5]Jingang Guo,Xiaoping Jian,Guangyu Lin.Performance Evaluation of an Anti-Lock Braking System for Electric Vehicles with a Fuzzy Sliding Mode Controller[J]. Energies 2014, 7:6459-6476.
[6]Ye M, Bai Z, Cao B. Robust sliding model control for regenerative braking of Electric Vehicle[C]. Proceedings of 2006 International Power Electronics and Motion Control Conference. Shanghai, China, 2006:1586-1589.
[7]孫旭.輪轂電機(jī)驅(qū)動(dòng)汽車復(fù)合制動(dòng)動(dòng)力學(xué)分析及控制[D].長(zhǎng)春:吉林大學(xué),2014.
Multiplex Control Strategy for Regenerative Braking System of Pure Electric Vehicle
Hui Dengfeng
(Zhenjiang of Jiangsu provinceRoad &bridge engineering corporation, Jiangsu Zhenjiang 212017 )
Abstract:Based on conventional control Strategy for regenerative braking system and the braking stability of the automotive, a new multiplex control strategy of regenerative braking system for pure electric vehicle is proposed. Using proposed strategy, simulations of pure electric vehicle by Matlab/simulink and Carsim under FTP75 standard working condition were done, and comparison with traditional parallel regenerative braking control strategy was carried out. The results showed that the proposed strategy not only ensures the braking stability, but also recycles more braking energy and extends the mileage.
Keywords:regenerative braking; simulation; control strategy; pure electric vehicles
中圖分類號(hào):U469.7
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1671-7988(2016)05-136-04
作者簡(jiǎn)介:惠登峰,工程師,就職于江蘇省鎮(zhèn)江市路橋工程總公司。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36