六點支撐穩定平臺自動調平控制系統的建模與仿真
2016-06-20 08:52:31周亭亭王渝西華大學汽車與交通學院四川成都610039
汽車實用技術 2016年5期
周亭亭,王渝(西華大學汽車與交通學院,四川 成都 610039)
?
六點支撐穩定平臺自動調平控制系統的建模與仿真
周亭亭,王渝
(西華大學汽車與交通學院,四川 成都 610039)
摘要:文章針對機電式六點支撐平臺的自動調平系統,建立了傳動系統、雙軸傾角傳感器以及最高點不動單向調平法控制策略的數學模型,并以此為基礎,在simulink中建立了本系統的仿真模型,將其與simmechanics中所建立的平臺模型相結合,對該系統進行仿真。仿真結果從理論上證明了最高點不動單向調平法調平策略的可行性。
關鍵詞:六點支撐平臺;自動調平系統;仿真模型;simmechanics
10.16638/j.cnki.1671-7988.2016.05.004
CLC NO.: U462.3Document Code: AArticle ID: 1671-7988 (2016)05-104-03
引言
自動調平系統在軍用和民用方面有著至關重要的作用,如車載雷達[1]、船舶制造[2]及水利建設中的升船機[3]等。對于負荷和跨度較大的車載平臺,四點支撐的平臺容易受力不均勻,使平臺的臺面變形撓度變大。因此本文研究了六點支撐平臺自動調平策略,并通過對該系統進行建模仿真,驗證了該調平策略的可行性。
1、調平策略的確定
調平的關鍵在于如何使六個支撐點位于同一水平面,而采用機電式驅動系統時,保持各支撐腿在調平的過程中做單向運動可以有效避免產生反向間隙,提高系統的調平精度。綜合考慮各種因素,最終確定了最高點不動調平法;該調平方法的特征是只上升不下降,可以滿足機電式驅動系統所需要的單向運動的要求,同時,也有效避免平臺因為自重過大或過度負載,產生無法調平的現象。
“單向調平”是指依次對兩個方向進行調平,先將 x 方向調至水平狀態,再將 y 方向調至水平狀態。該方式可以將復雜的平臺運動轉換為兩個相互獨立的調平過程,很大程度上降低了調平系統的耦合度。
考慮到車載平臺的驅動方式、結構、支腿個數以及各種調平策略的優缺點,最終確定該系統的調平策略為最高點不動單向調平法。
2、Simmechanics車載平臺建模與仿真
Simmechanics的主要作用是對多體的動力機械系統進行建模,并通過自帶的傳感器以及驅動器模塊使機械模型與物理域之間相互關聯,傳感器模塊主要是對鉸連接和實體的運動參數進行檢測,從而輸出simulink的信號。本文將該系統的坐標系設置在1支撐腿的位置,其他的機構通過采用參考坐標的方法,間接描述出其他剛體的位置[4][5]。
2.1車載平臺機械系統模型分析
驅動電機、伸縮腿以及支腿套筒組成了支撐腿的機械結構,而驅動電機則不屬于simmechanics中的實體結構。本文所建的模型中使用的驅動方式為速度驅動,輸入信號分別是位移、速度和加速度。由于simmechanics規定了剛體與剛體之間必需通過鉸鏈進行連接,不能直接相連,所以,伸縮腿與支腿套筒之間需要加入一個單自由度鉸鏈Prismatic。同理,支腿套筒也不能直接與平臺平面連接,需要在兩個剛體之間加入三自由的球面鉸鏈接Spherical。伸長腿與地面之間需要加入平面內移動的鏈接In-plane。
2.2支撐腿模型的建立
根據上一節系統模型的分析,建立支撐腿的simme-chanics模型,支撐腿的模型如圖1所示。

圖1 支撐腿的simmechanics模型
2.3平臺模型的建立
根據上一小節對平臺物理模型的分析,能夠建立平臺的simmechanics模型,平臺的模型如圖2所示。

圖2 平臺的simmechanics模型
3、自動調平系統整體建模與仿真
3.1傳動系統模型的建立與仿真
車載穩定平臺的傳動系統主要指螺旋升降機部分,主要是由蝸輪蝸桿所構成的減速器以及普通絲杠組成的。
不考慮普通絲杠和普通螺母之間的彈性變形和其他的非線性因素,然后將傳遞系統的模型簡化,根據傳動系統各個結構之間的關系,能夠得到各個變量之間的關系,假設ω為步進電機的角速度,不考慮步進電機的阻尼力B,則根據電機轉矩平衡的原理,能夠得出:
其中,Tk為步進電機的軸發生扭轉形變時產生的力矩
θ1、θ2、θ3分別為蝸桿、蝸輪以及普通絲杠輸出的角位移
T1、T2、T3分別為蝸桿、蝸輪以及普通絲杠的轉矩
Tks為普通絲杠軸由于扭轉變形而產生的力矩
vm為支撐腿的舉升速度。
根據該數學模型建立的該平臺傳動系統的仿真模型,仿真圖如圖3所示。

圖3 傳動系統的simulink模型
3.2雙軸傾角傳感器模型的建立與仿真
本文的車載平臺自動調平控制系統主要采用雙軸傾角傳感器得到X和Y兩個方向的傾角α’、β’,作為自動調平系統的被控量和反饋量,首先需要確定α’、β’與姿態變換角之間的關系。假設R為兩個坐標系之間的姿態變化矩,M’為平臺六個支撐點在水平坐標系的坐標矩陣,則M’為:


通過平臺的simmechanics模型中的位置傳感器,可以得到平臺六個支撐點在水平坐標系中的18個坐標值,然后根據公式求出平臺X方向和Y方向的傾角α與β。根據上面的理論分析和推理,可以建立本系統雙軸傾角傳感器的模型,其Simulink仿真圖如圖4所示。
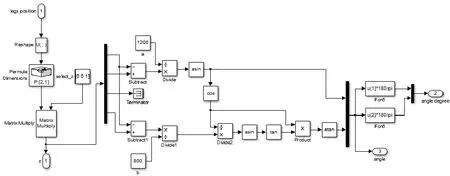
圖4 傳感器的simulink模型
3.3控制策略模型的建立與仿真
根據“最高點不動單向調平”法以及上面理論推導、計算和分析,可以建立本系統調平控制策略的模型,其Simulink仿真圖如圖5所示。

圖5 調平控制策略的simulink模型
根據以上建立的平臺simmechanics子模型、傳動系統子模型、雙軸傾角傳感器子模型以及該系統控制策略子模型,能夠建立調平系統的整體仿真模型,其Simulink仿真圖如圖6所示。
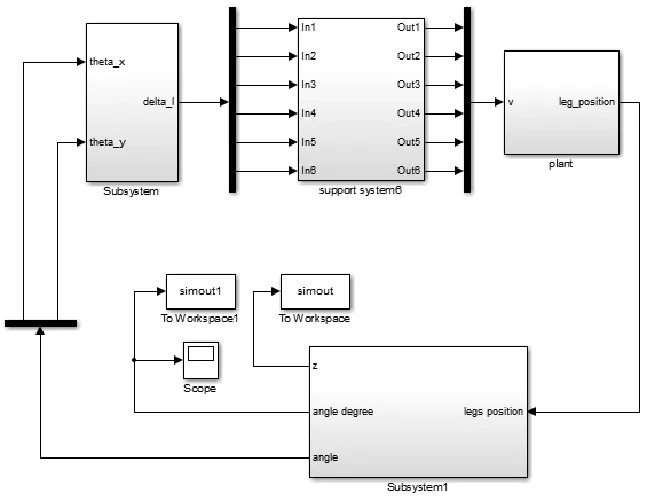
圖6 控制系統的simulink模型
4、仿真結果
假設平臺現在沒有出現虛腿,將平臺的初始角度設置為不同的情況,對該自動調平系統進行仿真,得到的仿真結果分別如圖7、8、9、10所示。
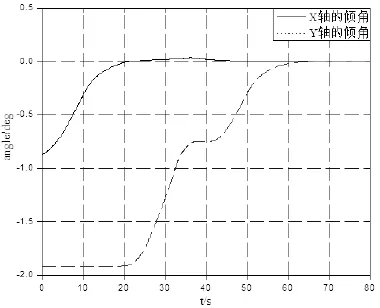
圖7 控制系統的仿真結果
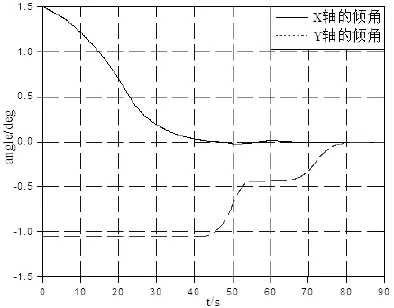
圖8 控制系統的仿真結果
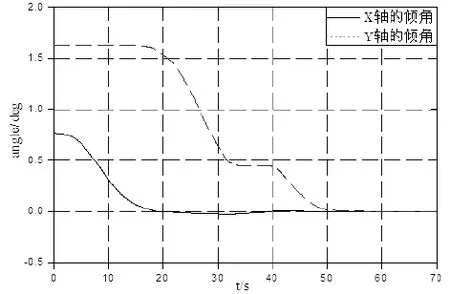
圖9 控制系統的仿真結果
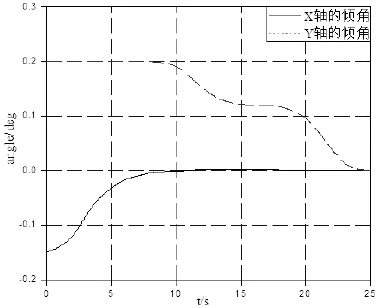
圖10 控制系統的仿真結果
該系統選擇了最高點不動單向調平法的調平策略,由仿真結果圖可以看出,X軸的傾角先發生變化,在X軸調平的過程中, Y軸的傾角并沒有發生變化,當X方向的傾角調為0度時,開始對Y方向進行調平。在對Y軸進行調平時,X軸的傾角發生了微小的變化,此時Y軸的傾角幾乎不變,等X軸重新達到水平狀態后,Y軸又開始調平。出現這種現象的原因可能是因為在系統調平的過程中出現了耦合現象,也有可能是因為支撐系統的超調所導致的,這些情況導致了該系統的調平時間變長。從以上4個圖中也可以看出,平臺的傾角越大,調平所需的時間就越長,但是角度和時間的關系并不是成比例的。
5、結論
本文首先確定調平方法以及理論分析與計算,建立了該系統“最高點不動單向調平”法這一控制策略的simulink仿真模型。以各個simulink1子模型為基礎,建立了該調平系統整體的simulink1仿真模型,對整個調平系統進行了仿真,從理論上確定了本文調平方法的可行性。
參考文獻
[1]馮儀,陳柏金.車載雷達機電式自動調平控制系統[J].華中科技大學學報(自然科學版),2004,32(6):66-68.
[2]張君. 基座水平度測量與自動調平技術的研究[D].大連:大連海事大學,2009:1-3.
[3]彭華偉. 三峽升船機液壓均衡與調平系統動態仿真研究[D].上海:上海交通大學,2002:2-6.
[4]Chifu Yang, Zhengmao Ye, O.Ogbobo Peter, Junwei Han. Modeling andSimulation of Spatial 6-DOF Parallel Robots Using Simulink andSimMechanics[C]. 2010 The 3rd IEEE International Conference on ComputerScience and Information Technology,2010:444-448.
[5]Fan Qin-man, Wu Yong-hai, Xu Cheng. Dynamic Simulation onMe-chanic-Liquid Coupling Model of Lift Mechanism[C]. 2009 The SecondInternational Conference on Information and Computer Science,2009:160-163.
The Modeling and Simulation ofSix-point Support Platform Automatic Leveling System
Zhou Tingting, Wang Yu
(Xihua University, School of Automobile &Transportation, Sichuan Chengdu 610039)
Abstract:This paper relates to an electromechanical six-point support platformautomatic leveling system, establishes a tran-smission system, dual-axis tilt sensor,and the highest point is not movable unidirectional leveling control strategy mathem atical model.On this basis, the simulation model of- the control system was established in simulink. And the simulation of the automatic leveling system was conducted by combining this model with the platform model established through simmechanics. The result of the simulation proves theoretically that the highest point fixedunidirectional leveling strategies are feasible.
Keywords:six-point support platform; automatic leveling system; simulation model; simmechanics
中圖分類號:U462.3
文獻標識碼:A
文章編號:1671-7988(2016)05-104-03
作者簡介:周亭亭,碩士研究生,就讀于西華大學汽車與交通學院,主要從事汽車電控技術的研究。王瑜,碩士研究生,就讀于西華大學汽車與交通學院,主要從事汽車性能測試與仿真方面的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19