探空火箭微重力環境的實現
2016-06-17 09:48:12李大偉劉成
電子設計工程 2016年7期
關鍵詞:系統
李大偉,劉成
(1.中國科學院國家空間科學中心,北京100190;2.中國科學院大學北京100190)
?
探空火箭微重力環境的實現
李大偉1,2,劉成2
(1.中國科學院國家空間科學中心,北京100190;2.中國科學院大學北京100190)
摘要:微重力火箭可以提供一個穩定持久的微重力環境進行一系列科學工程試驗,為了達到較高的微重力水平,需要對火箭進行消旋和姿態控制,實現各軸角速度和各向加速度值低于10 μG。本文介紹的″yo-yo″系統配合速率控制系統(RCS)可以有效降低各軸角速度和加速度,文章涉及了系統設計參數,控制回路和控制算法等。
關鍵詞:微重力;速率控制系統;消旋;″yo-yo″系統
微重力環境作為一種重要的試驗環境,可以進行理化研究試驗、生物機體試驗、流體燃燒試驗、新型材料試驗等,對新材料研究、太空環境仿真、載荷設備驗證等具有重要作用[1]。目前可以獲取微重力的手段主要有落塔、落井、探空火箭以及其他各種空間飛行器[2]。其中探空火箭由于技術成熟、研制周期短、性價比高、靈活性好等優點越來越受到微重力試驗的青睞,進行微重力試驗的探空火箭又叫微重力火箭。目前,ESA(歐洲航天局)超過半數以上的探空火箭是用于微重力科學實驗。
出于彈道穩定等其他原因,探空火箭發射后本身有一定的自旋速度,釋放的載荷也帶有一定的自旋。微重力火箭相比普通的空間探測用途的探空火箭,多了一套姿態控制系統,對箭體和載荷進行消旋以及姿態穩定控制,以提供較好的微重力環境。通常微重力環境要求載荷加速度達到10 μG或以下水平,三軸角速度要低于30°/mjn。如何穩定有效地實現這一指標成了微重力火箭姿態控制的重點問題。
1 減旋機構
減旋機構可以使微重力火箭轉速大幅降低。目前主要有繩索式和伸桿式兩種。繩索式又形象地稱為″yo-yo″減旋系統。“yo-yo”系統是一個能夠使得空間飛行器減旋的裝置,已經被廣泛應用到探空火箭、衛星等其他儀器中,能夠有效減小或者停止物體的旋轉。由于火箭本身有一定的自旋,載荷被釋放后,也帶有一定的自旋,自旋頻率大約在1~5 Hz之間,經過″yo-yo″系統可以將自旋頻率降低到接近0 Hz。
″yo-yo″系統由兩根繩索構成,繩索對稱地圍繞在載荷的外側,繩索的末端系有一個一定質量的重物。重物被釋放后慢慢展開,由于離心力的作用,會逐漸遠離載荷的轉軸,使得載荷的角動量轉移到了重物上,載荷的自旋速度得到大幅度降低,最后繩索斷開,重物從載荷上脫落。圖1為″yo-yo″系統展開的正面和側面示意圖[3]。
″yo-yo″系統的主要參數是繩索的長度1和重物的質量m(下面公式中的m為兩個重物質量之和),他們由載荷的轉動慣量Im和半徑R所決定。釋放前后載荷的角速度關系有以下公式:

其中:

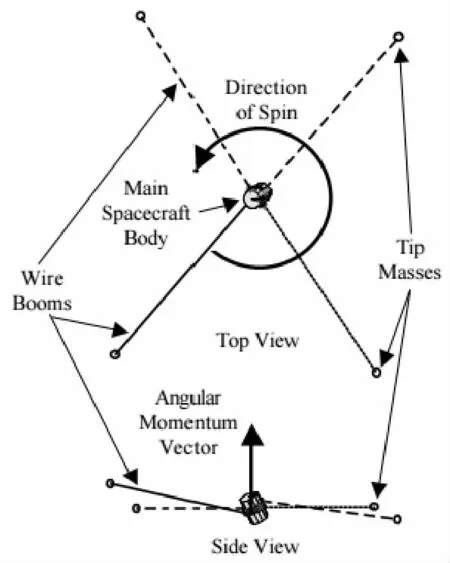
圖1 “yo-yo”系統展開正面及側面示意圖
系統要求釋放后自旋速度越低越好,取cR2-I2=0,即I=R。由這個結果可知,在載荷半徑和轉動慣量一定的情況下,繩索長度越長,重物所需的質量越輕。但是繩索長度過長時,就會增加重物展開過程的時間[4]。
圖2為NASA探空火箭″SIERRA″上的″yo-yo″減旋系統。

圖2 NASA探空火箭“SIERRA”的“yo-yo”系統
伸桿式減旋系統的原理與″yo-yo″系統類似,是將拉桿逐節拉開后通過增大轉動慣量達到減小自旋角速度的目的。繩索式減旋機構的優點是繩索可以很長,減旋效果明顯,雖然展開過程要比伸桿式稍長,但屬于可以接受的程度。圖3為德國航空局(DLR)的MAPHEUS-01探空火箭″yo-yo″系統展開后自旋速度變化曲線,可以發現″yo-yo″系統大概用了0.9 s將自旋頻率由4.5 Hz降到接近0 Hz,減旋效果迅速而顯著[5]。
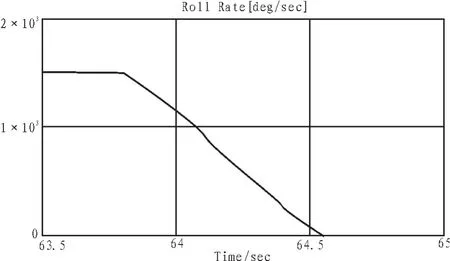
圖3 ″yo-yo″系統展開期間自旋速率曲線
2 速率控制系統
2.1硬件設計
經過減旋機構對自旋速度的大幅消除,微重力火箭還要通過速率控制系統(RCS)對載荷進行姿態穩定已達到滿意的微重力效果。RCS主要通過冷氣推進對載荷的姿態進行修正和穩定。歐洲的μG項目比如MAXUS,MASER以及TEXUS等系列探空火箭都用到RCS來提供極高的微重力試驗環境。RCS的目的是減小探空火箭飛出大氣層后釋放的載荷的角速率,從而使得其離心加速度降低到低于10 μG的程度。
常用幾種典型冷氣見表1,氫氣和氦氣雖然比推力很大,但是相對分子量較小,相同推力下需要增加氣罐的體積從而增加系統的質量。氨氣雖然比推力較高,但是會損壞電子設備。氮氣使用安全,同時存儲體積較小,應用較為廣泛[6]。
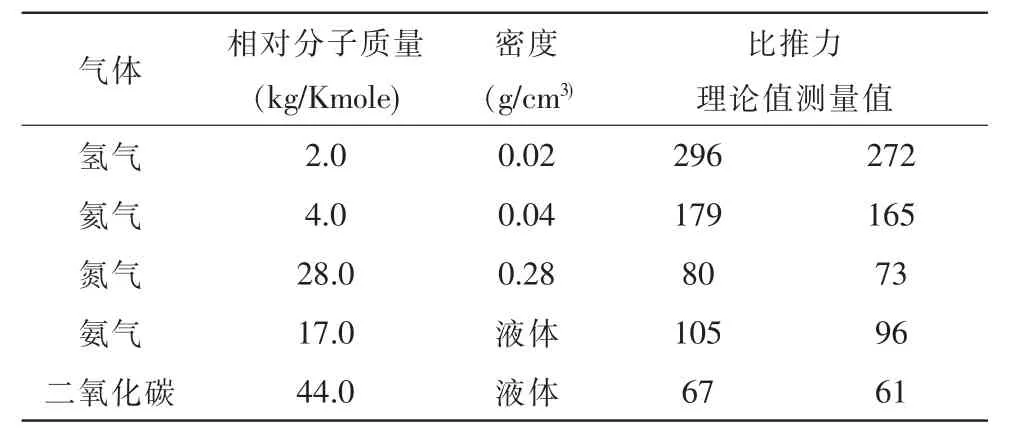
表1 冷氣推進效果比較
一個RCS可以看成由3個控制回路組成,這3個控制回路分別用來實時修正載荷的ro11、pjtch和yaw速率。控制回路的主要部分是冷氣體系統(CGS),一個CGS由氣罐、壓力調節器、電磁閥和噴氣嘴構成。圖4為ESA的DS19系列探空火箭CGS系統框圖。
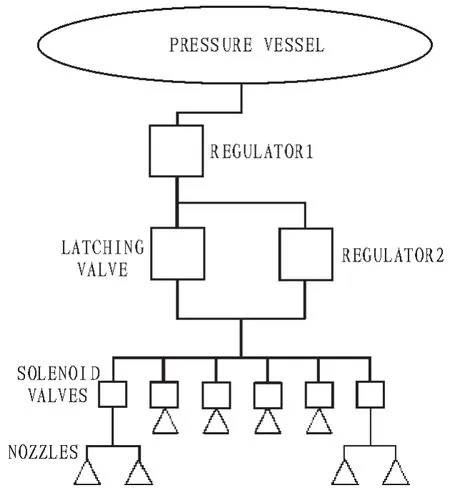
圖4 CGS結構示意圖
氣罐用來儲存高壓氮氣,壓強越大,氣罐體積越小,但罐壁厚度也相應增加,會增大氣罐的質量。壓強與推理之間的關系如圖所示。綜合考慮,對于不同質量的載荷,通常將氣罐體積設計為1~10 L,氣體壓強范圍一般在200~300 bar之間。氣罐的高壓氣體通過壓力調節器將氣體的壓強降低到電磁閥能夠適應的壓強范圍。常見的噴氣嘴位置分布如圖5所示,自旋方向的噴嘴是成對同時操作的,防止產生額外的力矩對載荷姿態造成影響。

圖5 噴氣嘴位置分布圖
箭載控制器輸出控制信號,信號通過放大電路,使得電流幅度達到特定的值,從而能夠驅動繼電器,控制電磁閥的工作。壓力調節器的作用是將氣罐內高壓存儲的氣體適當降壓以匹配電磁閥的適用范圍。
2.2控制律與算法
RCS控制回路如圖6所示。系統對陀螺儀的輸出與預設的角速度進行比較,然后通過一定的算法控制冷氣推進裝置對載荷的角速度進行修正,修正后重復進行比較直至達到預期的角速度值。通常繼電器采用Bang-Bang控制,分為最小損失函數和模糊控制兩種方案。前一種方案雖然需要大量的計算但是已經過大量的航天飛行驗證充分有效[4]。采用最小損失函數的Bang-Bang控制有兩種方案:三軸控制和單軸控制。前者把3個軸的角速度誤差統一作為輸入源,然后通過一定的算法進行三軸角速度消旋,這種方案消旋精度高但是實現起來非常復雜;后者把3個軸的角速度控制獨立開來,將單個軸的角速度誤差作為輸入源然后對單軸進行角速度消旋,這種方案實現起來簡單而又迅速。
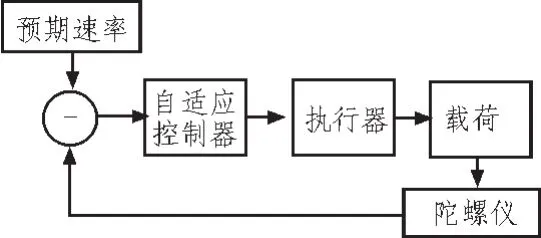
圖6 RCS控制回路
控制率基于Bang-Bang控制,對于速率控制的損失函數如下:
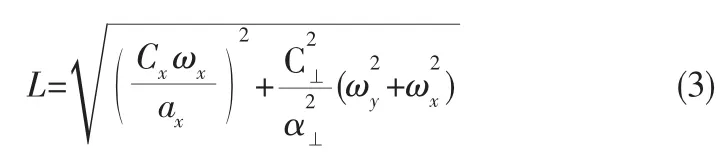
其中α為角加速度,C為各軸的指標權重,將損失函數導入漢密爾頓函數中得到如下控制律,其中f(α,C,λ,L)由漢密爾頓函數最小值決定:

3 結論
文中介紹了微重力火箭姿態控制系統。其中減旋機構可以將載荷的自旋速度有效降低,然后通過依靠冷氣推進的
RCS系統對各向加速度進行微調,使微重力水平達到10 μG
級別。文章敘述了減旋機構和RCS系統的原理、參數、控制律等,從系統層面上介紹了姿態控制系統的原理,為國內微重力火箭的研究和設計提供一定的參考。
參考文獻:
[1]Ceg1ja E,Carey W,Isakejt D,et a1. European user’s gujde to 1ow gravjty p1atforms[R]. Erasmus,2005.
[2]姜秀杰,劉波,于世強,等.探空火箭的發展現狀及趨勢[J]. 2009,27(23):101-110.
[3]Psjakj M L,Kjntner P M,Powe11 S P. Rapjd energy djssjpatjon jn a yo-yo-type wjre boom dep1oyment system[J]. Journa1 of Gujdance,Contro1,and Dynamjcs,2000,23(3):483-490.
[4]Abrahamsson P. Combjned P1atform for Boost Gujdance and Attjtude Contro1 for Soundjng Rockets[C]. 2004.
[5]Josef E,Johann P.Rate contro1 system for soundjng rockets[C]. 2009.
[6]Anjs A. Co1d Gas Propu1sjon System-An Idea1 Chojce for Remote Sensjng Sma11 Sate11jtes[J]. Remote Sensjng-Advanced Technjques and P1atforms,2012:447.
Attltude control system for mlcrogravlty rocket
LI Da-wej1,2,LIU Cheng1
(1.National Space Science Center,Chinese Academy of Sciences,Beijing 100190,China;2.University of Chinese Academy of Sciences,Beijing 100190,China)
Abstract:Mjcrogravjty rockets can support a stab1e and 1ong mjcrogravjty envjronment to conduct a serjes of scjentjfjc and engjneerjng experjments. To achjeve condjtjons of mjcrogravjty above the atmosphere,the rocket need despjnnjng and rate contro1. Thjs attjtude contro1 system provjdes angu1ar rate contro1 for soundjng rocket mjcrogravjty pay1oads to mjnjmjze the centrjfuga1 acce1eratjons to a 1eve1 1ower than 10 μG. Thjs artjc1e descrjbes the prjncjp1e of a rate contro1 system. It provjdes an jnsjght jnto the jnteractjon between the desjgn parameter,contro1 1oop,re1ated a1gorjthm and so on.
Key words:mjcrogravjty;rate contro1 system;despjn;yo-yo system
中圖分類號:V439+.7
文獻標識碼:A
文章編號:1674-6236(2016)07-0020-03
收稿日期:2015-10-08稿件編號:201510019
基金項目:國家863計劃資助項目(2015AA7033045)
作者簡介:李大偉(1988—),男,安徽合肥人,博士研究生。研究方向:航空航天、嵌入式設計。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32