伺服驅動器EtherCAT接口故障診斷及容錯技術的研究*
2016-06-16 02:16:19唐小琦顏外平
組合機床與自動化加工技術 2016年5期
關鍵詞:故障診斷
徐 健,宋 寶,唐小琦,顏外平
(華中科技大學 機械科學與工程學院,武漢 430074)
?
伺服驅動器EtherCAT接口故障診斷及容錯技術的研究*
徐健,宋寶,唐小琦,顏外平
(華中科技大學 機械科學與工程學院,武漢430074)
摘要:為解決EtherCAT協議應用于伺服驅動器所產生的故障診斷及容錯的問題,首先深入研究了基于EtherCAT協議的伺服控制系統架構,分析并總結了伺服驅動器EtherCAT總線接口所產生的運行故障及容錯技術,然后設計并實現了基于總結歸納的三類故障診斷及容錯機制流程,并搭建實驗平臺進行實驗測試,實驗結果表明,這種故障診斷和容錯技術的應用很好地提高了EtherCAT總線式伺服驅動器運行的可靠性和穩定性。
關鍵詞:EtherCAT;總線式伺服驅動器;故障診斷;容錯
0引言
現場總線技術的出現為高速高精的全數字化加工控制提供了基礎平臺[1],基于實時工業以太網的現場總線技術可以實現百兆全雙工的高速穩定通信,廣泛應用于各類工業自動化控制設備當中[2-4]。
然而這些協議運用在不同種類的設備上時,就會與設備本身的功能產生融合問題,一方面要求設備應用能夠充分利用協議接口實現功能的擴展;而另一方面又要確保協議接口本身不能影響設備的正常功能的實現。
基于此,本文針對工業以太網EtherCAT協議應用于伺服驅動器這一類設備當中所產生的故障診斷和容錯問題進行了深入的分析,研究并設計EtherCAT總線式伺服驅動器故障診斷流程以及相應的容錯機制,有效地解決了EtherCAT總線與伺服驅動器的融合集成問題,極大程度上提高了EtherCAT總線式伺服驅動器運行的可靠性和穩定性。
1EtherCAT的伺服控制
1.1EtherCAT的伺服控制系統
基于EtherCAT的伺服控制系統如圖1所示,EtherCAT總線式伺服驅動器通過ESC(EtherCAT Slave Controller)接入EtherCAT網絡中,EtherCAT主站通過集總幀的方式與各個伺服驅動器進行數據交互[5-6]。ESC對EtherCAT網絡中的數據幀進行解析和轉發,對有效數據進行上傳和下載操作。伺服應用層再通過PDI(Process Data Interface)接口與ESC中的有效數據進行交互,實現伺服控制的功能。
EtherCAT支持的應用層協議和伺服驅動器控制行規包括CANopen和SERCOS,分別對應于CoE(CANopen over EtherCAT)和SoE(SERCOS over EtherCAT)。本文基于CoE應用層協議,研究伺服驅動器EtherCAT接口的故障診斷及容錯技術。

圖1 EtherCAT伺服控制系統
1.2EtherCAT的伺服控制流程
基于CANopen協議的伺服控制框圖如圖2所示,CANopen伺服應用層通過周期性過程數據可以將EtherCAT網絡中的指令數據置于經典的三環控制流程當中,同時將反饋信息返回到網絡當中[7-9]。
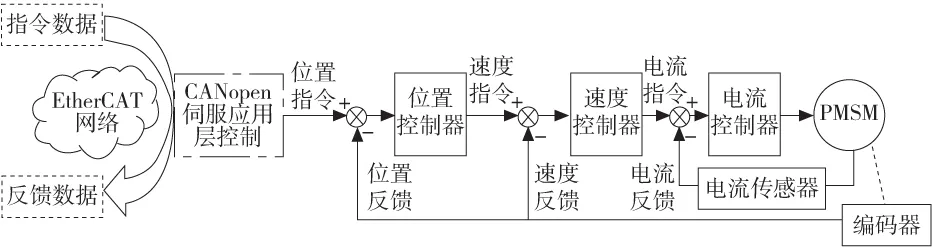
圖2 CoE伺服控制框圖
CANopen協議置于伺服應用層當中主要包括周期性過程數據的對象字典映射、CANopen郵箱通信協議實現對象字典參數的修改和功率設備狀態機維護等三大部分的內容。
2EtherCAT接口故障診斷研究及設計
EtherCAT伺服控制系統在運行過程中會產生各類故障診斷信息,按照層次邏輯可以將其劃分為三個方面,如圖3所示。具體包括EtherCAT總線通信故障診斷,主要針對EtherCAT通信應用層狀態的報警信息;CANopen協議通信故障診斷,主要診斷CoE郵箱通信等;伺服控制故障診斷,主要針對伺服三環控制算法中出現的故障進行診斷。
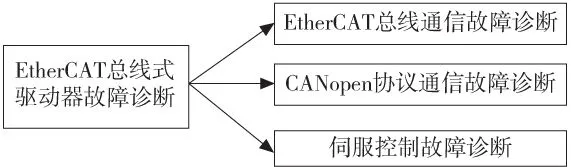
圖3 EtherCAT伺服驅動器故障診斷分類
2.1EtherCAT總線通信故障診斷
EtherCAT協議定義了一系列的標準化應用層狀態碼,部分狀態碼如圖4所示,其中主要定義了EtherCAT總線在初始化過程中配置的故障診斷信息,包括狀態機、SM同步管理通道、PDO映射配置等。

圖4 應用層部分狀態碼定義
以狀態機狀態碼0x0011、0x0012和0x0013實現為例,其實現流程設計如圖5所示。總線應用層不斷循環檢測應用層請求寄存器是否有狀態機切換事件發生,若有則根據當前狀態和請求狀態計算狀態轉換邏輯,然后根據狀態轉換邏輯來判別是否產生相應的錯誤狀態碼;若進行正常的狀態切換,則返回0x0000,并執行相應的狀態機操作。例如,狀態機由Init狀態直接切換到Safe-Op狀態,不符合協議要求,則直接返回0x0011狀態碼,即無效狀態改變。

圖5 狀態機狀態碼實現流程設計
再以郵箱SM同步管理通道檢測為例,設計流程如圖6所示。從站狀態在Pre-OP狀態下時,讀取郵箱SM0和SM1參數,順序檢測SM通道使能、讀寫屬性、但緩存區檢測、長度檢測和地址檢測等配置信息,若任何一個環節產生錯誤,則返回狀態碼0x0016。
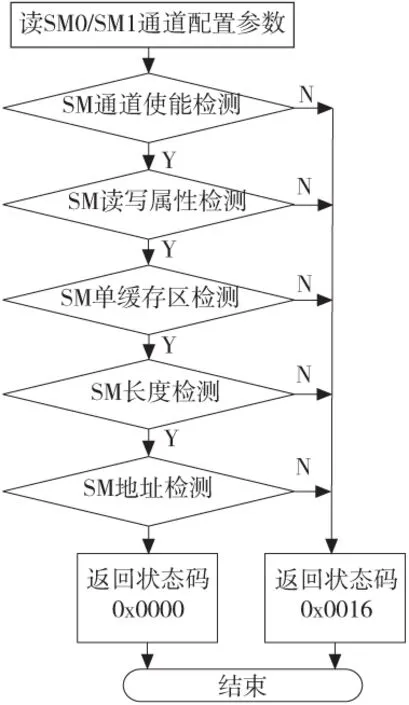
圖6 郵箱配置狀態碼實現流程設計
2.2CANopen協議通信故障診斷
在進行SDO通信時,當產生錯誤時,從站將終止SDO傳輸,產生錯誤代碼,由主站進行讀取,CoE通信部分常用的終止代碼如圖7所示。
以其中的部分SDO終止代碼實現為例,研究并設計了其實現流程,如圖8所示。從CoE緩存隊列中讀取郵箱數據幀,首先判斷郵箱頭是否為CoE郵箱類型,反之則返回命令無效代碼;然后,從數據幀中提取操作索引和子索引,根據索引和子索引查找數據字典,依次判斷是否存在、子索引超差和讀寫屬性等信息是否一致,反之則返回相應的錯誤代碼。

圖7 部分SDO終止傳輸代碼

圖8 SDO終止代碼實現流程設計
2.3伺服控制故障診斷
伺服驅動器屬于功率設備的一種,滿足DS402功率設備狀態機的要求,如圖9所示。其中,伺服控制故障類型根據具體的伺服應用而定,但其反映在功率設備狀態機中統稱為出錯。出錯的狀態統一反映在設備的狀態字0x6041中,可由主站獲取從站伺服的狀態信息進行故障診斷判別。

圖9 CoE功率設備狀態機
3EtherCAT接口容錯技術研究及設計
當EtherCAT伺服驅動器經過故障診斷產生報警信息后,一方面從站根據所產生的報警信息進行自我容錯的診斷,可歸納為從站主動容錯技術;而另一方面主站獲取到從站的報警信息后也會進行相應的容錯處理,可稱為從站被動容錯技術,如圖10所示。

圖10 伺服驅動器EtherCAT接口容錯機制分類
3.1從站主動容錯機制的設計
在上述出現的三類故障診斷信息中,CANopen協議通信故障產生的報警信息并不會影響從站功能正常實現,其次,伺服控制故障產生的報警信息并不能由從站自行進行復位,否則將會產生不安全的因素。因此,從站在自我容錯機制當中,當總線通信出現故障時可以進行容錯從而防止更進一步的危險出現。
在EtherCAT總線通信故障中,針對應用層時間產生的狀態碼,設計了如圖11所示的主動容錯流程。當從站通信產生應用層錯誤代碼時,從站根據不同狀態下的狀態碼進行相應的自我保護機制處理,即在不同的狀態機切換下主動關閉相應的通信通道,避免進一步的錯誤數據傳遞。當產生錯誤代碼時,對應于狀態切換I→P(I→B)、P→S和S→O產生關閉對應郵箱通信通道、輸入數據通道和輸出數據通道。

圖11 從站主動容錯流程
3.2從站被動容錯機制的設計
從站的被動容錯機制是在基于主站已經獲取了從站的報警信息代碼的前提之下,主站根據相應的報警復位清除策略對從站采取的容錯流程。主要包括EtherCAT總線通信故障和伺服控制故障兩類錯誤診斷,其中對于EtherCAT總線通信故障被動容錯機制而言,從站在進入錯誤狀態后,采取主動容錯機制后,停止數據的輸入輸出,等待主站的復位信號出現后,開始響應主站的控制命令,同時開啟輸入輸出通道,正常運行從站。
當伺服控制環產生故障診斷而EtherCAT總線通信正常時,產生的故障診斷信息通過伺服狀態字0x6041反饋給主站,主站得知伺服控制產生報警時,通過如圖9所示的CoE功率設備狀態機進行伺服復位0x6040,重新執行伺服算法,主站控制器重新調整控制策略,進行伺服控制,達到被動容錯的流程。
4實驗測試平臺及結果
本文實驗平臺的主站采用的是德國Beckhoff公司基于PC的自動化軟件TwinCAT,從站采用的基于上述故障診斷技術設計的伺服驅動器,實驗平臺圖如圖12所示。

圖12 實驗測試平臺
首先進行EtherCAT總線通信故障診斷的測試,以狀態機切換為例,當總線處于初始化狀態Init時,主站手動發送Boot狀態指令,觀測主站讀取從站驅動器反應如圖13所示,此時TwinCAT軟件通過讀取寄存器讀取到了相應的應用層錯誤代碼0x0013,即不支持引導狀態。通過主從的一致檢測可以反映基于上述流程設計的EtherCAT總線故障診斷技術產生作用。其余的分類測試結果與圖5和圖6中的結果保持一致。

圖13 應用層故障診斷測試
然后進行CANopen通信協議故障診斷實驗,以進行寫數據字典中不存在的索引為例,如TwinCAT軟件發送讀0x2000索引,子索引0,TwinCAT軟件得到了從站的錯誤相應,代碼為0x06020000,即從站伺服驅動器不存在這個索引,提醒主站的錯誤操作,如圖14所示。
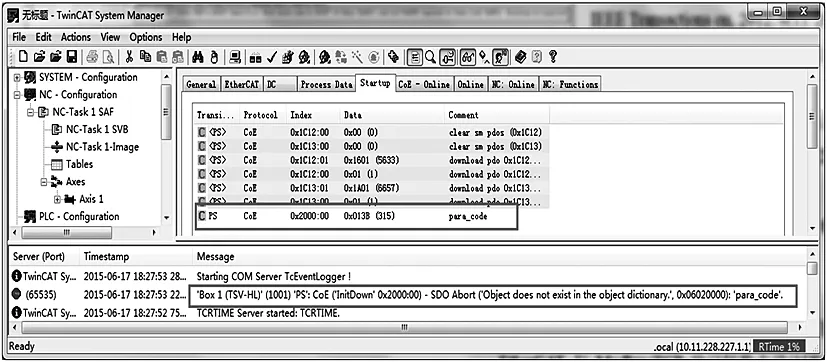
圖14 CANopen郵箱通信診斷測試

圖15 伺服控制診斷測試
最后進行伺服控制故障診斷實驗,當伺服控制電機正常運轉時,人為地抽離編碼器線纜,伺服掉強電使能產生錯誤報警,此時TwinCAT軟件伺服控制面板上產生錯誤,如圖15所示,當重新接入編碼器線纜時,用伺服控制面板復位伺服控制錯誤,可以重新使伺服驅動器強電使能并清除報警信息,使伺服正常運轉。
5結束語
本文針對EtherCAT總線協議應用于伺服驅動器這一類設備中所產生的故障診斷和容錯技術進行了深入研究,設計并實現了各類故障及容錯技術的實現流程,實驗達到了令人滿意的效果,對于提高EtherCAT總線式伺服驅動器的穩定性和可靠性有重要意義。
[參考文獻]
[1] 謝劍. 高檔數控系統中的現場總線接口技術設計與開發[D]. 上海:上海交通大學, 2010.
[2] 魏亞鵬, 韓衛光. 實時工業以太網技術的研究[J]. 組合機床與自動化加工技術, 2013 (7): 49-53.
[3] 朱政紅, 王月娥. 工業以太網在控制領域中的實時性技術[J]. 低壓電器, 2010 (7): 31-34.
[4] Orfanus D, Indergaard R, Prytz G, et al. EtherCAT-based platform for distributed control in high-performance industrial applications[C]//Emerging Technologies & Factory Automation (ETFA), 2013 IEEE 18th Conference on. IEEE, 2013: 1-8.
[5] 郇極, 劉艷強. 工業以太網現場總線 EtherCAT 驅動程序設計及應用[M]. 北京:北京航空航天大學出版社, 2010.
[6] 劉艷強, 王健, 單春榮. 基于 EtherCAT 的多軸運動控制器研究[J]. 制造技術與機床, 2008(6): 100-103.
[7] 阮倩茹, 王輝, 施大發, 等. 基于 EtherCAT 的高性能交流伺服控制系統設計[J]. 科技導報, 2010, 28(20): 58-61.
[8] Sung M, Kim K, Jin H W, et al. An EtherCAT-based motor drive for high precision motion systems[C]//Industrial Informatics (INDIN), 2011 9th IEEE International Conference on. IEEE, 2011: 163-168.
[9] Kim Y J, Kim K H, Bae Y C. An implementation of vector control of AC servo motor based on optical-EtherCAT network[J]. The Journal of the Korea institute of electronic communication sciences, 2013, 8(4): 583-588.
(編輯趙蓉)
Research on Fault Diagnosis and Fault Tolerance Technology of Servo Driver’s EtherCAT Interface
XU Jian, SONG Bao, TANG Xiao-qi, YAN Wai-ping
(School of Mechanical Science and Engineering, HuaZhong University of Science and Technology, Wuhan 430074, China)
Abstract:To solve the EtherCAT protocol applied servo drives produced by fault diagnosis and fault tolerance of problems, first in-depth study of the servo control system architecture based EtherCAT protocol, analyze and summarize the operational failure and fault tolerance technology servo drive’s EtherCAT bus interface have produced, then design and implement mechanism process based on summarized the three fault diagnosis and fault tolerance, and experimental platform to experiment experimental results show that the application of this fault diagnosis and fault tolerance techniques well improve the EtherCAT bus servo drive’s reliability and stability.
Key words:EtherCAT; bus type servo driver; fault diagnosis; fault tolerance
文章編號:1001-2265(2016)05-0083-04
DOI:10.13462/j.cnki.mmtamt.2016.05.022
收稿日期:2015-06-24;修回日期:2015-07-22
*基金項目:科技重大專項:高檔數控機床與基礎制造裝備(2013ZX04007-021)
作者簡介:徐健(1992—),男,江西宜春人,華中科技大學碩士研究生,研究方向為數控技術、現場總線及網絡,(E-mail)xujian0935@163.com。
中圖分類號:TH166;TG506
文獻標識碼:A
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00