發(fā)動機控制回路故障模型研究①
2016-06-15 03:50:17鄭鸞鳳鄭忠明北京摩詰創(chuàng)新科技股份有限責任公司北京0009中國南方航空公司北京分公司北京006
計算機系統(tǒng)應用 2016年4期
鄭鸞鳳,鄭忠明(北京摩詰創(chuàng)新科技股份有限責任公司,北京 0009)(中國南方航空公司北京分公司,北京 006)
?
發(fā)動機控制回路故障模型研究①
鄭鸞鳳1,鄭忠明2
1(北京摩詰創(chuàng)新科技股份有限責任公司,北京 100029)
2(中國南方航空公司北京分公司,北京 100621)
摘 要:以CFM56-5B渦扇發(fā)動機為研究對象,通過需求分析對發(fā)動機控制系統(tǒng)進行功能模塊劃分和控制回路外部接口關系的確定,提出了發(fā)動機控制回路仿真的基本建模原則,采用條件有向圖理論和部件級建模的綜合建模方法對發(fā)動機控制回路進行了建模分析.并采用 MATLAB/Simulink 對發(fā)動機控制回路的部件模型進行仿真,通過模擬器的調試驗證,結果表明所建立的發(fā)動機控制回路故障模型符合模擬器仿真發(fā)動機控制系統(tǒng)的要求.
關鍵詞:發(fā)動機控制系統(tǒng); 部件級建模; 條件有向圖; MATLAB/Simulink仿真
1 引言
機務維護斷模擬器可以仿真飛機在空中和地面兩種不同條件下機載電子系統(tǒng)的自測試、故障和航線維修過程三個方面,幫助維修人員直觀學習機載電子系統(tǒng)的使用和工作原理; 培訓他們從系統(tǒng)故障原理的角度思考,按照現(xiàn)象分析--測試--換件--測試循環(huán)的故障診斷過程進行排故,進一步提高排故能力.由于該模擬器使用航線可更換組件(LRU)的仿真硬件,而不用航材,所以它的造價大大降低.相對于CBT軟件的培訓以及使用機載設備硬件仿真設備培訓,機務維護模擬器既保證了航線維修中排故的綜合和真實感訓練,又避免了使用大量航材而造成的昂貴價格.
CFM56-5B發(fā)動機控制系統(tǒng)采用當前最先進的全權限數(shù)字發(fā)動機控制系統(tǒng)(FADEC),該系統(tǒng)不僅實現(xiàn)對發(fā)動機進行控制,同時還監(jiān)視各系統(tǒng)的工作狀態(tài),當檢測到故障時,將其進行分類和存儲,同時向維護人員提供必要的告警或維護信息,維護人員根據這些信息按照故障隔離手冊給定的程序進行排故,從而減少排故工作的盲目性,保證航班正點率.為了讓維護人員正確掌握FADEC系統(tǒng)的排故方法,準確快速定位故障,有必要對控制系統(tǒng)每個控制回路的故障檢測原理、排故措施進行分析并建立模型.國內外航空發(fā)動機仿真研究大多都是建立發(fā)動機的半物理仿真數(shù)學模型,而在機務維護模擬器故障模型方面的研究還甚少.本文對發(fā)動機建模方法進行了深入的研究,建立了具有完整性、維護擴展方便的機務維護模擬器發(fā)動機控制系統(tǒng)故障模型,實現(xiàn)了發(fā)動機控制回路功能模擬,此模型并可接收故障擾動,以滿足維護模擬機對發(fā)動機控制系統(tǒng)的操作、測試和故障仿真的要求,強調仿真復雜的故障效應,可用于訓練維護人員對系統(tǒng)工作原理的把握和故障隔離能力.
2 條件有向圖建模理論
2.1條件有向圖的一些定義
根據發(fā)動機控制系統(tǒng)的技術特點,可以采用有向圖來建立發(fā)動機控制系統(tǒng)故障模型.下面給出條件有向圖的幾個定義:
定義1.節(jié)點是指工作流的活動節(jié)點.
定義2.節(jié)點與節(jié)點之間的轉移如果是有條件的,則稱這兩個節(jié)點之間的轉移為條件轉移弧,用→C表示; 如果是沒有條件限制的,則稱這兩個節(jié)點之間的轉移弧為無條件轉移弧,用→表示.
定義3.條件有向圖表示為G={N,A,C} 的3元組,其中:
(1)N={n1,n2,…} 為節(jié)點集合.一個節(jié)點ni既可以是輸入節(jié)點,也可以是輸出節(jié)點.
(2)A={(ni,nj,ck)}為轉移弧的集合,方向為從ni節(jié)點指向nj節(jié)點.CA為條件轉移弧的集合,NCA為無條件轉移弧的集合.如果ck為空條件,則該轉移弧為無條件轉移弧,無條件轉移弧的另一個語義解釋為該轉移條件永遠為真.
(4)規(guī)定圖G有唯一的開始節(jié)點和結束節(jié)點.開始節(jié)點只有輸入沒有輸出,結束節(jié)點只有輸入沒有輸出.
2.2條件有向圖模型
(1)串行模型
串行模型是最簡單、最容易理解的模型,它是指按照預定的節(jié)點列表有序地執(zhí)行,如圖1所示.只有當條件C1滿足時才會發(fā)生A→B的轉移,而B→C沒有轉移,則認為該轉移條件永遠為真.

圖1 串行模型
(2)發(fā)散模型
發(fā)散是指執(zhí)行到某一步以后將產生多個分支,根據各個分支并行地執(zhí)行各個分支的后續(xù)序列.如圖2所示,當由節(jié)點A串行執(zhí)行到節(jié)點B,執(zhí)行完節(jié)點B以后將產生3個分支,分別計算3個分支的轉移條件,計算結果為假的分支將被拋棄,即如果C1的計算結果為真時,節(jié)點C將被執(zhí)行,B→E的轉移條件為空,根據空即為真的原則,節(jié)點E肯定會被執(zhí)行.
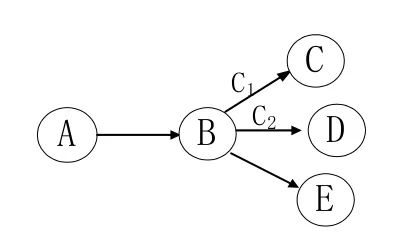
圖2 發(fā)散模型
(3)聚合模型
因為有了“發(fā)散”,在一個流程的后續(xù)運轉中,就會出現(xiàn)“聚合”問題.聚合是指多個發(fā)散后的分支再次匯聚成一條通路的情況.匯聚的各個分支條件之間的關系又分為兩種: AND和XOR.
1)當條件之間的關系為AND時,采用同步聚合的方式,即當有AND聚合時,執(zhí)行引擎將等待,直到所有的有效前驅節(jié)點執(zhí)行完畢以后,分別計算各個轉移條件,然后再進行各個轉移條件之間的AND計算,只有計算結果為真時才會引發(fā)節(jié)點D的執(zhí)行.如圖3所示,如果A、B、C都是有效節(jié)點,則只有當A、B、C都執(zhí)行完,且各個轉移條件 C1、C2、C3都為真時,節(jié)點D才會被執(zhí)行,條件C1、C2、C3有一個為假都將導致節(jié)點D及其后續(xù)通路的失效.

圖3 聚合模型
2)當條件之間的關系為XOR時,并不需要進行各個前驅節(jié)點間的同步,各個前驅節(jié)點分別執(zhí)行完畢后計算其轉移條件,如果自己的轉移條件為真,則直接發(fā)生轉移,為假則不發(fā)生轉移,如圖3所示,如果當節(jié)點B先被執(zhí)行完畢,則進行條件C2的計算,結果為真,則發(fā)生B→D的轉移,反之則不發(fā)生轉移.
2.3系統(tǒng)結構模型化
基于有向圖拓撲結構的思想,系統(tǒng)模型化原則如下:

圖4 模型化過程
1)在飛機運行的維護工作中,航線可更換件(LRU)是故障診斷的目標,線路也是常見故障,因此,以LRU和線路為系統(tǒng)模型結構中的最小組成元素.
2)以AMM、TSM、ASM和AWM手冊為依據,分析系統(tǒng)結構原理,抽象出故障點的LRU和線路,分析其輸入輸出特性.
3)對于功能復雜的LRU,只分析其與系統(tǒng)操作和故障有關的輸入輸出變量.對于具有多輸入輸出的元素,其端口用數(shù)字標記區(qū)分.
4)AWM中包括一些電氣連接器VC、終端接線盒VT、接地端子VG和接地點VN,這些元件在TSM中不是故障點,因此不必對其研究分析.
使用有向圖建模時,用節(jié)點N表示系統(tǒng)中的故障點LRU,用連接兩個節(jié)點的轉移弧A來表征LRU之間的線路,用條件表達式C表示連接線路的故障情況,取值為{0,1},為布爾型,1表示線路正常沒有故障,0表示線路有故障,上一節(jié)點的功能信息不能傳遞至下一節(jié)點,因此圖G={N,A,C} 稱為系統(tǒng)的有向圖模型.在有向圖中,用連接兩節(jié)點的有向箭頭表示線路的連接關系,若該連接線路也是故障點,則標出該條支路的線號,若不是故障點,則不標出線號.用矩形框表示節(jié)點,加注組件范號以示區(qū)別,實線矩形框表示真正的故障節(jié)點,虛線框表示虛擬的故障節(jié)點.
3 發(fā)動機控制回路故障模型分析
發(fā)動機控制系統(tǒng)故障模型以FADEC為中心,根據航空維修手冊,建立從面板按鈕輸入、其他系統(tǒng)輸入到顯示器輸出、聲音輸出、其他系統(tǒng)輸出的線性輸入輸出關系,并且分析故障擾動對模型產生的影響,其模型結構如圖5所示.
3.1控制回路輸入模型
發(fā)動機控制回路故障模型輸入主要包括面板按鈕、頂板跳開關、推力桿、與發(fā)動機關聯(lián)的其他系統(tǒng)以及故障擾動的輸入.
模型中面板按鈕包括發(fā)動機主控電門、方式選擇旋鈕、人工啟動電門、發(fā)動機維護面板等.主控電門用于選擇自動啟動; 方式選擇旋鈕用于選擇發(fā)動機啟動方式; 人工啟動電門則用于人工選擇供油和點火時機;頂板跳開關的作用主要是為發(fā)動機的電子控制系統(tǒng)供電,既可為EIU或ECU等的正常工作提供28V直流電,也可為發(fā)動機啟動過程中點火提供115V交流電.
與發(fā)動機相關聯(lián)的其他飛機系統(tǒng),如電氣系統(tǒng)、液壓系統(tǒng)、燃油系統(tǒng)、引氣系統(tǒng)、APU系統(tǒng)、空調系統(tǒng)等,在發(fā)動機工作過程的各個階段,分別為發(fā)動機控制提供各種所需輸入.
故障擾動是發(fā)動機控制回路故障模型研究的重點和難點.故障擾動輸入包括TSM所有故障TASK中各組件的故障信號.組件故障擾動輸入用布爾型變量F表示,只有“正常”和“故障”兩種狀態(tài),“正常”表示對應元素的相應端口沒有故障,“故障”表示控制管理中心設置元素的對應端口為故障狀態(tài).

圖5 發(fā)動機控制回路故障模型結構
3.2控制回路本體模型
發(fā)動機控制回路本體模型接收駕駛艙傳遞的按鈕和開關的離散信息,以及推力桿的角度信息,同時還可接受故障擾動,為音響系統(tǒng)提供發(fā)動機轉速,為燃油系統(tǒng)提供發(fā)動機耗油率,為滑油系統(tǒng)提供滑油壓力和溫度,同時為發(fā)動機的相關座艙儀表、信號燈和告警燈等提供相應指示信息等,能夠實現(xiàn)發(fā)動機控制系統(tǒng)操作、測試和故障擾動的影響,是系統(tǒng)模型的主要組成部分.
其建模步驟為:
1)抽象節(jié)點
抽象發(fā)動機控制回路中含故障點的LRU為節(jié)點.ATA規(guī)定外場航線故障診斷主要是更換LRU,而TSM所有故障TASK中均以LRU為故障點,因此以LRU為發(fā)動機控制回路故障模型的基本單元建立節(jié)點模型,既可以描述系統(tǒng)的工作原理,又可以仿真TSM的各種故障TASK.
2)建立節(jié)點模型
(1)選擇節(jié)點輸入輸出端口: 在分析AMM、ASM中系統(tǒng)工作原理和TSM故障TASK基礎上,有辨識的選取組件的某些輸入輸出端口,并分析各端口間的傳輸關系.
(2)故障影響分析: 建立節(jié)點故障擾動輸入向量,并評估故障擾動對節(jié)點各輸出端口的影響.
(3)建立節(jié)點的模型
建立圖6所示的節(jié)點模型,包括輸入(I、A)、輸出(Y)和功能函數(shù)三個部分,具有多輸入、多輸出的特點.不同節(jié)點之間通過變量的下標(組件FIN號)區(qū)別.

圖6 節(jié)點模型基本結構圖
輸入分為故障擾動輸入F、控制輸入I和數(shù)據輸入A三種; 中間變量為控制邏輯輸出y(N),輸出結果為節(jié)點功能結果Y(N).其表達式如下:

其中,故障輸入F表示來自控制管理中心的故障擾動信號,控制輸入I表示節(jié)點的主控信號,數(shù)據A表示組件各輸出接點回路的輸入數(shù)據.控制邏輯輸出y(N)作用于數(shù)據輸入A,得到節(jié)點輸出Y(N).控制邏輯g一般為邏輯表達式,數(shù)據功能G通常是分段函數(shù),分段條件是控制邏輯g的輸出y(N).
3)建立系統(tǒng)本體整體模型: 在建立各節(jié)點模型的基礎上,通過條件有向圖理論合成得到系統(tǒng)控制回路的整體故障模型.
節(jié)點之間的傳輸關系由節(jié)點模型中的控制輸入I和數(shù)據輸入A表達,表達式中Lbi-a表示節(jié)點a從節(jié)點bi(i=1,2,…,n)獲得控制輸入,數(shù)據功能輸入Acj-a=Y(Ncj)(j=1,2,…,m),即節(jié)點a的輸入是其上級節(jié)點的輸出.節(jié)點之間依據原理圖中的信息傳遞方向,通過控制輸入I和數(shù)據輸入A建立的傳輸關系相互作用,構成系統(tǒng)控制回路的故障模型,根據條件有向圖建模理論和系統(tǒng)結構建模化原則,節(jié)點之間的連接導線故障用有向圖的條件變量ck表示,為布爾型,取1表示節(jié)點之間連線沒有故障,取0表示連線故障,上一節(jié)點的信息不能傳遞到下一節(jié)點,對公式1進行修正后的表達式為:

3.3控制回路輸出模型
發(fā)動機的輸出主要包括發(fā)動機指示、系統(tǒng)監(jiān)控、向駕駛員發(fā)出的警告以及其他系統(tǒng)的輸出.發(fā)動機運行的有關信息,以刻度盤的形式顯示在飛機電子中央監(jiān)控(ECAM)上,其他數(shù)字式讀數(shù)、警告、注意事項和建議信息則以文本方式顯示,向駕駛員發(fā)出的警告則以聲音和燈光等的形式出現(xiàn).
4 發(fā)動機控制回路故障模型仿真
航空發(fā)動機控制系統(tǒng)作為機務維護模擬器的一個非常重要的、必不可少的子系統(tǒng),是一個復雜的全數(shù)字仿真系統(tǒng),它的建立過程遵循著由物理系統(tǒng)到系統(tǒng)模型再到仿真模型的循序漸進過程和貫穿于其中的對物理系統(tǒng)的分析與建模、對系統(tǒng)模型的編程與實現(xiàn)和對仿真模型的仿真實驗的循環(huán)往復過程.根據系統(tǒng)模型化原則,以CFM56-5B渦扇發(fā)動機的發(fā)動機燃油控制回路為例,分析回路中各組件的功能原理以及輸入輸出特性,并引入TASK故障,建立節(jié)點故障模型,最后運用有向圖建模方法,對控制回路進一步分析,建立了發(fā)動機燃油控制的故障模型,如圖7所示.
4.1控制回路的Simulink模型
在建立的發(fā)動機燃油控制回路的輸入模型、本體模型和輸出模型基礎上,首先在MATLAB/Simulink中仿真故障模型中各節(jié)點模塊并實現(xiàn)封裝,然后依據組件端口的I/O關系,按信號的傳輸回路構建控制回路的整體仿真模型.
發(fā)動機燃油控制回路中既有油路信息又有電路信息的傳遞,所包含的組件類型也各不相同,既有跳開關、繼電器等常見組件,又有作動器、燃油泵、液壓機械組件、活門等及其復雜的特殊組件,而所有組件模型均包括故障擾動輸入、控制輸入、數(shù)據輸入和兩種功能函數(shù)(控制邏輯和數(shù)據功能),因此各種元素的MATLAB/Simulink實現(xiàn)基本一樣,只是復雜程度上有一定的區(qū)別.
單輸入單輸出組件和傳輸線的結構比較簡單,分別建立仿真封裝,如圖8和圖9所示.

圖7 發(fā)動機燃油控制回路故障模型有向圖

圖8 單輸入輸出實現(xiàn)及封裝

圖9 傳輸線實現(xiàn)及封裝
在發(fā)動機燃油控制回路中,應用較多也是較復雜的是多輸入多輸出組件,下面以發(fā)動機主控電門繼電器11QG為例建立仿真模型并封裝,如圖10所示.
根據圖7所示的發(fā)動機燃油控制回路模型結構,以信號的傳輸回路為單元,將所建組件的MATLAB/ Simulink仿真模塊依據組件各端口的I/O關系相連,得到控制回路的整體仿真模型?仿真模型按照控制功能分塊,下面以HP燃油關斷活門控制燃油的通斷功能為例實現(xiàn)仿真模型如圖11所示.
由圖11知,發(fā)動機主控開關3KC的控制端口1A從傳輸線L7325·0231獲取低電平; 3KC置于OFF位時,端口3A從傳輸線L7325·0233獲取高電平信號,401PP有電并且跳開關1KC1閉合,28V直流電經傳輸線L7612·0046輸入至3KC端口3G; 而3KC置于ON位時,端口2A從傳輸線L7325·0232獲取高電平信號,接地信號經傳輸線L7612·0022輸入至3KC端口2G.依次類推,3KC端口1G經傳輸線L7612·0011輸出至HMU控制線圈端口A/1.HMU的HP燃油活門控制線圈判斷接收的信號,控制活門位置,若反饋至ECU的活門位置與指令位置不一致,ECU輸出一個故障信息至EIU,經過處理之后,EIU通過燈信號測試組件8LP指令發(fā)動機防火/故障燈5KS1的“FAULT”燈亮.同時,繼電器11QG控制線圈端口X1經傳輸線L7612·0011也獲得3KC端口1G的輸出,地信號經傳輸線L7612·0052輸入至11QG端口X2,控制線圈判斷接收的信號,控制低壓燃油活門馬達的高電平輸入,從而控制低壓燃油活門的位置.

圖10 繼電器11QG實現(xiàn)及封裝
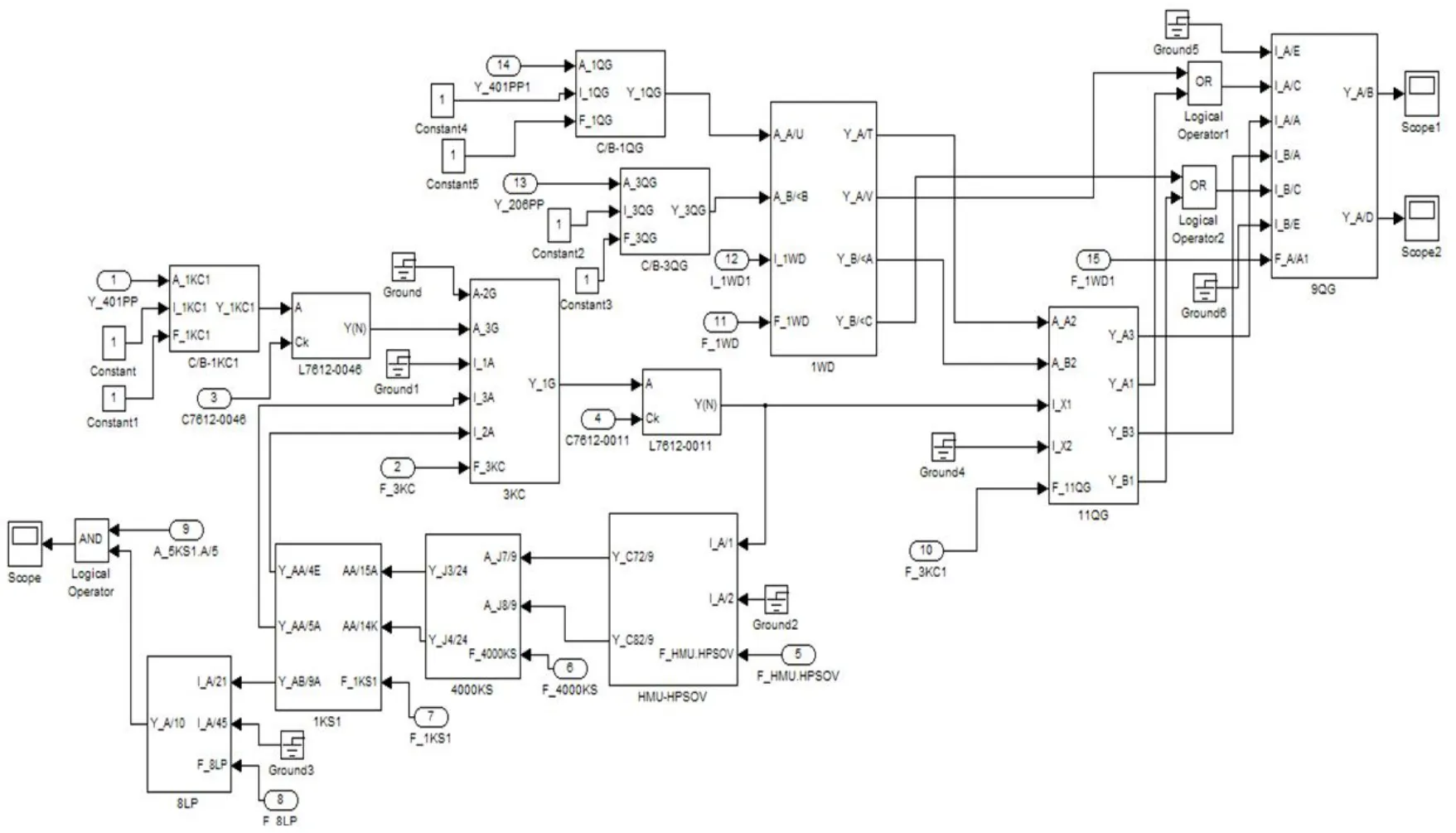
圖11 HP燃油關斷活門控制燃油通斷功能的Simulink模型

圖12 ECAM上燃油信息的顯示
4.2實例測試分析
在維護模擬器的仿真過程中,系統(tǒng)故障模型是核心,它接收故障擾動的輸入以及駕駛艙控制盒上各種按鈕的輸入,經過模型的運算,輸出到顯示器上,從而實現(xiàn)系統(tǒng)操作、測試和故障擾動影響.以下為維護模擬器發(fā)動機系統(tǒng)控制回路正常運行和在教員控制臺設置故障之后得到的顯示結果:
(1)在發(fā)動機運行正常的情況下,燃油泵過濾器不發(fā)生堵塞,在下ECAM上不會顯示“FUEL CLOG”的故障信息; 液壓機械組件計量燃油流量,通過上ECAM顯示燃油流量(F.F)信息,同時已耗燃油(F.USED)信息在下ECAM上顯示,如圖12所示.

圖13 發(fā)動機試車故障設置
(2)在機務維護模擬器教員控制端口點擊菜單欄中“發(fā)動機試車”à“設置發(fā)動機試車項目”,即顯示發(fā)動機試車主界面,選擇hot hang for auto start,“是否故障”欄中顯示“√”,點擊“OK”,故障設置成功,如圖13所示.
設置好試車故障之后啟動相應的發(fā)動機,發(fā)動機不能正常啟動,在上ECAM頁面出現(xiàn)故障告警信息,并在學員端界面顯示排故方法.
由以上實例測試結果表明,所建立的故障模型能夠滿足機務維護模擬器對發(fā)動機控制系統(tǒng)在正常操作和故障影響方面的任務要求.
5 結論
依據航空維修手冊等資料,在CFM56-5B發(fā)動機控制系統(tǒng)原理知識基礎上,通過有向圖理論和部件級建模相結合的方法,建立了發(fā)動機控制回路的故障模型,并通過Matlab/Simulink進行了仿真驗證,為機務維護模擬器的發(fā)動機仿真模型提供了理論和技術支持.
參考文獻
1姚華.未來航空發(fā)動機控制技術的發(fā)展趨勢.航空科學技術,2012/6:1–6.
2張紹基.航空發(fā)動機控制系統(tǒng)的研發(fā)與展望.航空動力學報,2004,19(3):375–382.
3熊海國.飛行模擬器發(fā)動機系統(tǒng)建模與面向對象的仿真研究[博士學位論文].哈爾濱:哈爾濱工業(yè)大學,2010.
4A320 Aircraft Trouble Shooting Manual.China Northwest [DB].REVISION NO.24 Nov 01/03.
5A320 Aircraft Schematic Manual.China Northwest.REVISION NO.24 Nov 01/03.
6CFM56-5B engine system training manual.CTC-201 Level 4 08/02.
7CFM56-5B fault detection & annunciation.CTC-231 Level 4 05/09.
8曹源,金先龍,孟光.航空發(fā)動機的非線性模塊化建模與仿真.計算機輔助設計與圖形學學報,2005,17(3):505–510.
9鄧明.航空燃氣渦輪發(fā)動機原理與構造.北京:國防工業(yè)出版社,2008.
Fault Model Research of Engine Control Circuit
ZHENG Luan-Feng1,ZHENG Zhong-Ming2
1(Beijing Moreget Creative Technology Corporation Limited Company,Beijing 100029,China)2(Beijing Branch of China Southern Airlines,Beijing 100621,China)
Abstract:The CFM56-5B turbofan engine was discussed in this paper,functional model of engine control system and the control circuit’s external interface were defined through requirement analysis.It proposed basic modeling principle of simulation of engine control circuit.Then the conditional directed graph theory combined with assemblies modeling method was adopted to establish engine control circuit simulation model.Finally,MATLAB/Simulink was used to simulate the component model of engine control circuit.And the results show that the simulation models are accorded with the requirements of simulator engine control system through adjusting and proving.
Key words:engine control system; component level modeling; conditional directed graph; MATLAB/Simulink simulation
收稿時間:①2015-07-12;收到修改稿時間:2015-09-09
