基于電液比例控制的液壓支架搬運技術研究
2016-06-01 11:35:30周國力楊國宏
電氣傳動自動化 2016年4期
周國力,楊國宏
(華亭煤業集團,甘肅平涼744100)
基于電液比例控制的液壓支架搬運技術研究
周國力,楊國宏
(華亭煤業集團,甘肅平涼744100)
根據煤礦井下工作面液壓支架安裝搬運的技術要求,提出了一種采用電液比例技術驅動控制的液壓支架搬運系統。該系統采用電液控制技術,采用電液比例變量泵控馬達閉式容積調速回路系統作為液壓支架搬運系統的動力驅動方案。運用Matlab軟件對系統進行了仿真。為了進一步改善系統的穩定性和快速性,提出了基于遺傳算法的PID校正控制方案。仿真結果表明,校正后的系統具有較好的穩定性和控制效果。
液壓支架;容積調速;電液比例控制系統;Simulink模型
1 引言
作為煤礦井下綜采機械化工作面的支護設備,液壓支架在煤礦開采中具有重要價值和作用。近年來,隨著科技的發展和進步,液壓支架的結構和重量不斷趨于復雜化和大型化,其快速運輸和轉移技術成為制約煤礦綜采效率和水平的重要因素。因此,開發高效率、大容量的液壓支架搬運技術成為當前煤礦高效生產的研究熱點[1]。
本文根據煤礦開采工作面液壓支架的安裝和快速撤除的技術要求[2],開發了一種基于電液比例驅動控制的支架搬運新方案。該方案采用了比例控制與液壓驅動技術,并利用了電液比例變量泵控馬達閉式容積調速回路。為保證搬運系統的兩輪能保持同步且獨立運動,該方案采用了雙泵與雙馬達組成的獨立的左右驅動回路,檢測兩側的雙馬達轉速,可進行速度的同步與獨立控制。
作為液壓支架搬運系統的動力驅動方案,由于液壓驅動的輸出力和力矩較大,容易實現精確的自動化控制,故該系統特別適合于大慣量的液壓支架搬運控制。
本文運用Matlab仿真軟件對系統進行了仿真,驗證了系統的穩定性。同時,為改善系統性能并使其獲得較寬的更加良好的頻率調節范圍,本文采用了基于遺傳算法的PID校正控制,以使校正后的系統具有最佳控制效果和穩定性能。
2基于電液比例控制的液壓支架搬運驅動系統
2.1系統控制方案
如圖1所示為系統控制方案。為適應液壓支架搬運驅動的控制要求。本文采用電液比例變量泵控液壓馬達容積閉式回路,在該調速回路中,液壓馬達的調速范圍較大,可獲得較低的工作速度,并能以恒扭矩方式進行調速。同時,為保證搬運系統的穩定性,確保兩側獨立同步運行,本文在系統設計中,兩側分別采用一套變量泵與液壓馬達液壓驅動系統,并使之相互獨立、對稱,而且互不干擾。
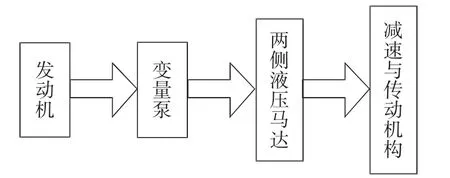
圖1系統控制方案
2.2電液比例控制系統
典型的基于電液比例控制的液壓支架搬運系統的結構如圖2所示,系統主要由雙向液壓馬達、變量泵、測速與傳感裝置、減速與傳動機構等構成。變量泵為系統提供液壓能源供應并進行變排量調節。當液壓泵的轉速一定時,按照一定的規律可以調節其排量大小,即可以調節輸出到液壓馬達的流量大小和方向。液壓馬達的速度可經由其上的速度傳感器進行檢測。減速與傳動機構可實現系統低速搬運動作的傳動與執行。另外,系統配有補油泵,它用作系統散熱、冷卻和泄漏的補充等,并可為變量機構提供恒定的控制油壓。
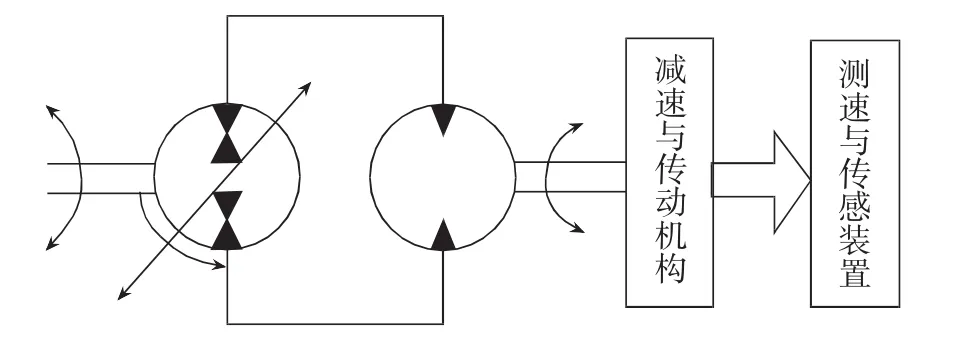
圖2單側典型的電液驅動控制系統
基于電液比例控制的液壓支架搬運系統,其兩側分別帶有一套獨立的驅動控制系統,采用兩個獨立的液壓馬達進行驅動控制。為了在實際運行過程中保證兩側馬達的同步運轉,使其轉速相等,本系統的電比例驅動回路采用兩側雙泵獨立供油,實現了兩側馬達的獨立驅動控制。
2.3定量馬達的轉速檢測與反饋控制
圖3為變量泵控制液壓馬達的閉環控制原理圖。轉速傳感器檢測并獲得驅動裝置的速度信號,與給定的速度信號進行比較運算,通過控制器進行運算和處理后,得到控制信號,該信號控制電比例液壓閥和液壓泵的變量調節機構,使得系統的速度偏差不斷減小,并最終使得兩側液壓馬達達到同步運動。該系統為兩側獨立運行的速度控制閉環系統,其控制精度較多取決于轉速傳感器的精度和電液比例閥的頻寬。
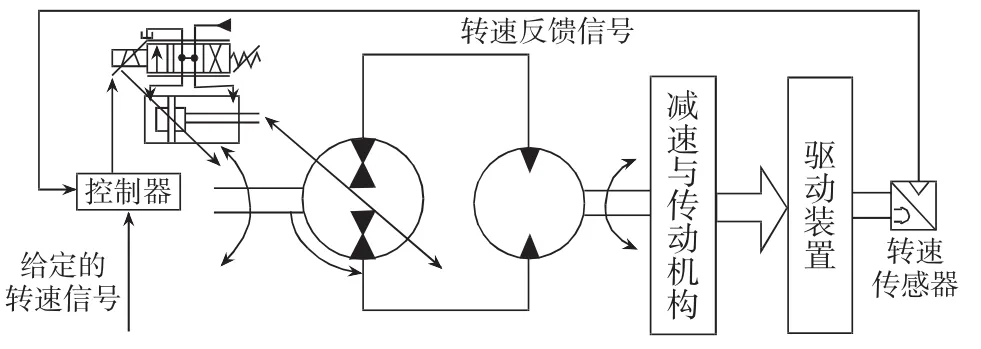
圖3變量泵控制液壓馬達的閉環控制原理圖
3基于Matlab/Simulink的仿真研究
由于系統兩側回路對稱,本文僅對單側變量泵控制定量馬達的閉環控制系統建立仿真模型并進行仿真研究。
3.1基于PID控制的電液比例控制系統模型
系統基于Matlab/Simulink的仿真模型如圖4所示。
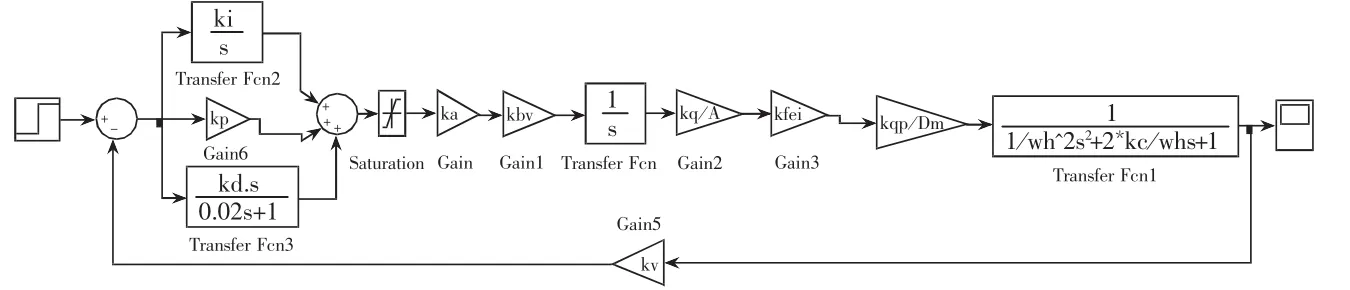
圖4基于Matlab/Simulink的仿真模型
模型主要由PID控制器模塊、限幅模塊、基于電液比例控制的變量泵模塊、變量泵控液壓馬達模塊及轉速檢測反饋模塊等組成。
通過調整PID控制器的參數設置可以改變和優化系統的響應特性,并獲得系統良好的動態特性。本文通過混合遺傳算法優化PID參數,獲得系統在給定目標函數下的最優性能。
3.2基于遺傳優化算法PID控制的電液比例驅動控制系統模型
利用遺傳算法優良的搜索能力獲得控制器的最優解,并得到PID控制器參數的最優解,然后通過該解控制整個系統模型的輸出。
如圖5所示,建立基于遺傳算法PID控制的Matlab/Simulink優化模型。模型的輸入為單位階躍信號,優化指標為ITAE指標,即為最小誤差時間積分。
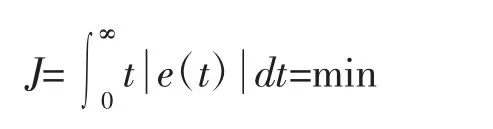
設定仿真時間為10s,PID控制器三參數全局優化范圍設定為:

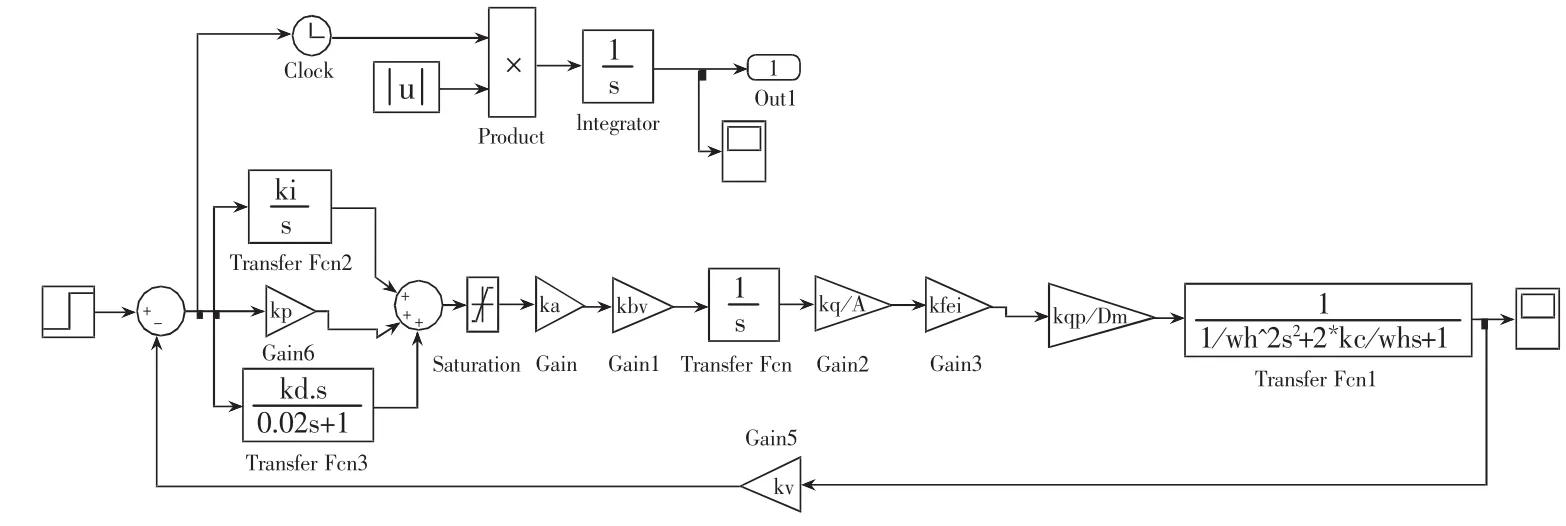
圖5基于遺傳算法PID控制的優化模型
通過遺傳算法優化得到的PID的最優值為:

3.3系統特性的對比分析
為了研究優化前后系統的響應情況,通過優化前后階躍響應曲線進行對比分析。
如圖6所示,根據階躍響應的對比仿真結果可知,基于遺傳優化算法的PID控制器的電液驅動系統響應速度快,系統的上升時間為0.5s級別,而基于普通PID控制器的系統響應時間約為2s。同時,基于遺傳優化算法的PID控制器的電液驅動系統的穩態時間和上升時間獲得了極大的改善,系統的超調量很小,穩態精度很高,而普通PID控制器階躍響應的超調量很大,約達到30%,系統的穩定性能較差。因此,通過基于遺傳優化算法的PID控制器可以有效提高控制系統的響應特性和穩定性。
圖6遺傳優化算法PID控制與普通PID控制階躍響應的對比仿真結果
當采用PID調節時,系統在起始的一段時間內,實際的輸出轉速與給定轉速之間的偏差仍較大,波動較為劇烈。對于重型支架搬運系統而言,搬運的初始振動通常無法避免,穩態情況時能夠滿足同步且達到偏差控制性能指標即能說明PID控制方法有效。
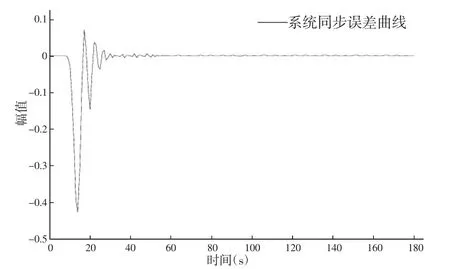
圖7同步控制的誤差曲線
4結束語
本文提出了一種液壓支架電液比例牽引傳動與調速控制方案,分析研究了系統的回路組成和工作原理。通過建立系統的仿真模型,對系統的工作與調速特性進行了研究,主要研究了系統的快速性、穩定性、準確性等控制系統常見的控制特性。仿真研究結果表明,基于電液比例控制的液壓支架搬運控制系統具有較快的響應速度、自然且良好的穩定性,可滿足系統牽引控制的要求。本文的研究為該方案的工程應用奠定了良好基礎,也為液壓支架搬運控制技術的研究開辟了新方向。
[1]張全有.國內外液壓支架搬運技術發展狀況及其應用展望[J].煤礦技術,2002,(8).
[2]洪曉華,陳 軍.礦井運輸提升[M].徐州:中國礦業大學出版社,2005.(13).
[3]防煥英.我國煤礦輔助運輸的現狀與發展[J].煤礦機電,1998,(5).
[4]陳偉健,齊秀麗.礦山運輸與提升[M].徐州:中國礦業大學出版社,2007.(2).
[5]楊韜仁.我國煤礦輔助運輸的現狀和無軌膠輪技術的應用[J].煤炭科學技術,2006,(3).
Research on hydraulic support handling technology based on electro-hydraulic proportional control system
ZHOU Guo-li,YANG Guo-hong
(Huating Coal Industry Group,Pingliang 744100,China)
According to the requirements of the working face of the coal mine hydraulic support installation and dismantle mechanization process,a novel kind of hydraulic support handling technology based on electro-hydraulic proportional control system is proposed.The hydraulic drive system with proportional control technology uses the closed volume control circuit system of the electro-hydraulic proportional variable displacement pump control motor as the driving scheme of the hydraulic support transportation vehicle system.The Matlab software is used for the system simulation.In order to improve the stability and fast performance of the system,a genetic algorithm based PID correction control is presented and the simulation results show that the system has good stability and better control performance after correction.
hydraulic support;volumetric speed control;electro-hydraulic proportional control system;Simulink model
TD434
A
周國力(1972-),男,甘肅華亭人,工程師,主要從事煤礦機電等方面的設計研究工作。
2016-06-15
1005—7277(2016)04—0025—04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年5期)2022-06-10 07:46:12
房地產導刊(2022年5期)2022-06-01 06:20:14
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
模具制造(2019年3期)2019-06-06 02:10:54