蜘蛛型玻璃清洗機器人的設計
2016-05-30 05:36:46張裕佳伍偉
軟件工程 2016年1期
關鍵詞:設計
張裕佳 伍偉
摘 要:針對當前人工清洗玻璃時,存在危險性高、難度大、效率低等問題,設計了玻璃清洗機器人,具體闡述了各個組成部分的結構和工作原理,給出了結構框圖和部分電路原理圖,最后通過實驗對機器人在玻璃壁面上的行走適應情況以及壁面清洗效果進行了測試,從測試情況可以看出,該機器人具有重量輕、體積小、清洗效果好、控制方便等特點,有較好的市場推廣和應用價值。
關鍵詞:清洗;機器人;藍牙;吸附;設計
中圖分類號:TN710 文獻標識碼:A
1 引言(Introduction)
隨著經濟的不斷發展,許多高樓大廈平地而起,但同時又帶來了一個問題,那就是大廈玻璃的清洗,目前還主要靠人工清洗[1],可是人工清洗危險性很高、操作繁瑣、難度較大、效率低[2,3],本文設計了一種玻璃清洗機器人,能代替人工進行玻璃清洗工作,經測試獲得了較好的效果,有一定的實用價值。
2 整體硬件設計(Design of the overall hardware)
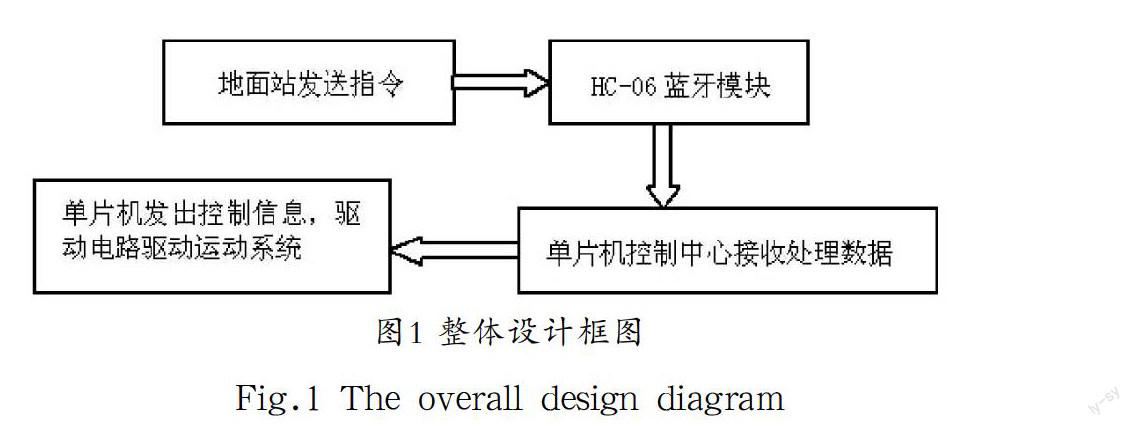
設計的整體框圖如圖1所示,它主要由地面站(手機或電腦等有藍牙模塊的裝置)、HC-06藍牙模塊、89C52單片機為核心的控制電路、以電磁閥和真空產生器為驅動模塊和由兩個雙出桿雙作用氣缸和8個真空吸盤氣缸的運動系統組成。其中使用手機藍牙串口客戶端發出指令信息到和51單片機連接的藍牙模塊,單片機判斷指令并執行相應子程序,發出相應的控制信號控制電磁閥的開關從而達到控制與之連接的氣缸的伸出抽入,以達到機器人上、下、左、右運動的目的。在這個移動過程中,由機器人身上所帶有的清洗刷進行移動擦洗,安全保護系統主要是保證物品升降移動正常運行,最大限度的降低意外事故的發生幾率。
圖1 整體設計框圖
Fig.1 The overall design diagram
3 控制芯片的選擇(The choice of control chip)
考慮STC89C51RC/RD+系列單片機具有寬工作電壓3.4V—6V,超強抗干擾、高速、低功耗、無法解密、指令代碼完全兼容傳統8051、12時鐘和6時鐘模式可任意選擇的特點[4,5]。所以在本設計中,控制芯片采用了STC89C51RC/RD+。
4 玻璃清洗機器人行走原理簡介(Introduction on
glass cleaning robot principle)
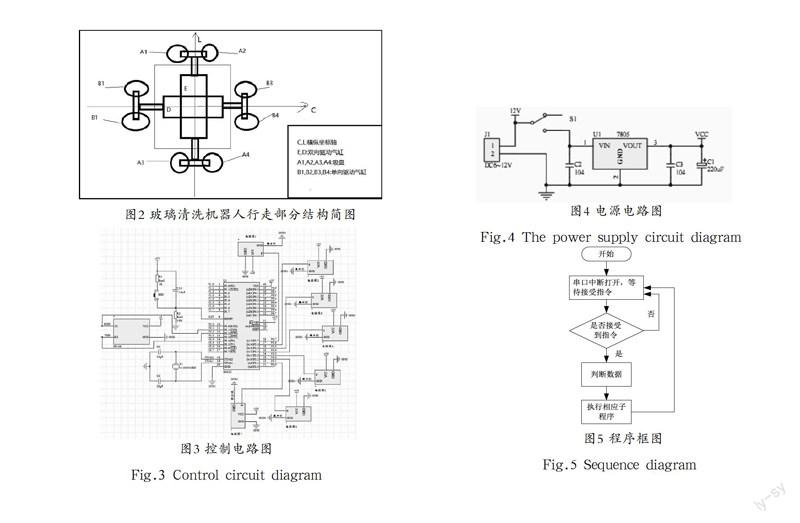
該機器人的兩個伸縮氣缸E、D呈十字形交叉型,分別固定到中間連接板上,通過單片機控制進行其上下和左右行走,該機器人利用四個吸盤組A1、A2、A3、A4產生的吸力緊貼玻璃。機器人的尾部連接清洗裝置,清洗裝置由雨刷和滾刷組成,滾刷由一個電機帶動進行清洗工作。雨刷安裝在清洗裝置底部的四周,使清洗裝置貼住玻璃時密閉不漏水,同時也有一定的清洗作用[6]。
圖2 玻璃清洗機器人行走部分結構簡圖
Fig.2 Part structure diagram glass cleaning robot
如圖2所示為玻璃清洗機器人行走結構簡圖(不含清洗裝置),在圖中,A1、A2、A3、A4為吸盤組,E、D為雙向驅動氣缸,B1、B2、B3、B4為單向驅動氣缸,氣缸E和氣缸D由中間連接板連接,使其構成一個整體,完成行走,開始由橫向B1、B2、B3、B4吸住玻璃固定,縱向可向上下伸縮,然后通過A1、A2吸盤通過氣缸E向上伸到某個位置,接著吸附在玻璃表面固定,A3、A4也通過氣缸E向上伸,然后通過類似的方法固定在玻璃表面,接著橫向的吸盤釋放真空,使橫向的組件整體向上移動到某一個位置,吸附在玻璃表面,從而實現機器人的向上移動,類似的方法,可以實現機器人其他三個方向的移動行走。
5 部分硬件電路設計(Design of part of the
hardware circuit )
5.1 控制電路
如圖3所示為其控制部分電路圖,圖中包括51單片機最小系統、HC-06藍牙模塊、6個電磁閥等(電源模塊未畫出)。
圖3 控制電路圖
Fig.3 Control circuit diagram
5.2 電源模塊
圖4為電源電路,單片機控制模塊等的運行提供穩定的電壓。
圖4 電源電路圖
Fig.4 The power supply circuit diagram
6 軟件設計(The software design)
單片機上電后等待從藍牙模塊發過來的指令,當地面站發送十六進制數0x02時,單片機接受判斷執行go_ahead()函數,機器人向上移動,以此類推。程序框圖如圖5所示。
圖5 程序框圖
Fig.5 Sequence diagram
7 結論(Conclusion)
對玻璃清洗機器人的行走適應情況以及壁面清洗效果進行了探究,對玻璃清洗機器人的整體構架、硬件電路、軟件程序進行了相關的設計,做出實物并進行了測試,經測試該爬壁玻璃清洗機器人在豎直玻璃壁面上行走穩定,清洗效果好,越障能力較強,有一定應用價值和市場前景。
參考文獻(References)
[1] 張兆君,周延武,宗光華.擦窗機器人在高層建筑清洗中的應
用[J].建筑技術,2001,32(9):620-621.
[2] 朱洪濤,廖文國,肖勇.墻壁清潔機器人的控制系統設計[J].河
南科技,2010,(10):65-66.
[3] 杜微,等.一種新型自動玻璃清潔機器人的系統設計[J].黑龍
江科技信息,2013,(31):62.
[4] 王巍,曹彤.一種輕型玻璃幕墻清洗機器人模型的研究[J].液
壓與氣動,2006(01):17-19.
[5] 胡啟寶.多吸盤式玻璃幕墻清洗機器人本體設計[D].上海交
通大學碩士論文,2007.
[6] 崔培雪,馮憲琴.典型液壓氣動回路600例[M].北京:化學工業
出版社,2011.
作者簡介:
張裕佳(1995-),男,本科生.研究領域:電子制作.
伍 偉(1994-),男,本科生.研究領域:信號處理.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04