基于相平面法的同步Buck變換器動態分析
2016-05-30 19:53:30周小林
中國高新技術企業 2016年20期
周小林

摘要:相平面法可以直觀清晰地反映系統的動態過程及性能,現有的Buck變換器分析過程大部分基于微分方程,分析過程欠直觀。文章利用相平面法對Buck變換器進行分析,選取電流和電壓作為相平面坐標,分析其電流和電壓的變化過程。該方法計算簡單、概念清晰,可以直觀地反映電流和電壓的變化過程。
關鍵詞:Buck變換器;非線性系統;相平面法;微分過程;相平面坐標 文獻標識碼:A
中圖分類號:TM133 文章編號:1009-2374(2016)20-0062-02 DOI:10.13535/j.cnki.11-4406/n.2016.20.030
1 概述
相對于傳統的線性電源,開關電源具有轉換效率高、輸入電壓范圍大、輸出電壓穩定等優點,廣泛應用于工業控制、電力系統等領域。開關電源的拓撲形式多種多樣,其中Buck變換器是最為簡單且具代表的一種,已應用于光伏并網、LED和電池充電等領域。雖然Buck變換器應用廣泛,但其分析過程大部分是基于微分方程的,分析過程欠直觀,難于工程應用。
相平面法是分析非線性系統的一種常用方法,通過相平面圖直觀清晰地反映系統的動態過程及性能,其計算簡單、概念清晰,非常適合于工程應用。
本文利用相平面法對同步Buck變換器的動態過程進行分析,選取具體的物理量為相平面坐標軸,通過相平面得到Buck變換器中變量的變化趨勢,為后續的分析設計提供依據。
2 同步Buck變換器模型
Buck變換器的原理圖如下:
當開關S1、S2處于不同狀態時,該電路有不同的動態特性,該系統屬于切換系統,其數學模型如下:
當S1閉合、S2斷開時,Buck變換器的狀態空間模型
如下:
當S1斷開、S2閉合時,Buck變換器的狀態空間模型如下:
式(1)、式(2)中:L表示電感感量;C表示輸出電容容量;R表示負載電阻阻值;iL表示電感電流;vi表示輸入電壓;vo表示輸出電壓。
當電路正常工作時,以上兩種狀態不停切換,其整體呈現出來的動態特性就是以上兩種特性的疊加。
3 Buck變換器的相平面模型及其動態分析
若對同步Buck變換器直接套用傳統的相平面法,則獲得輸出電壓及其導數構成的相平面,與實際物理量不存在直接對應的關系。為了獲得物理意義明確的相平面圖,這里選擇實際物理量作為相平面坐標,使相平面更加直觀清晰。對上述的同步Buck模型,選取vo為橫坐標、iL為縱坐標,則相平面中的曲線斜率如下:
當S1閉合、S2斷開時,相平面中的斜率為:
當S1斷開、S2閉合時,相平面中的斜率為:
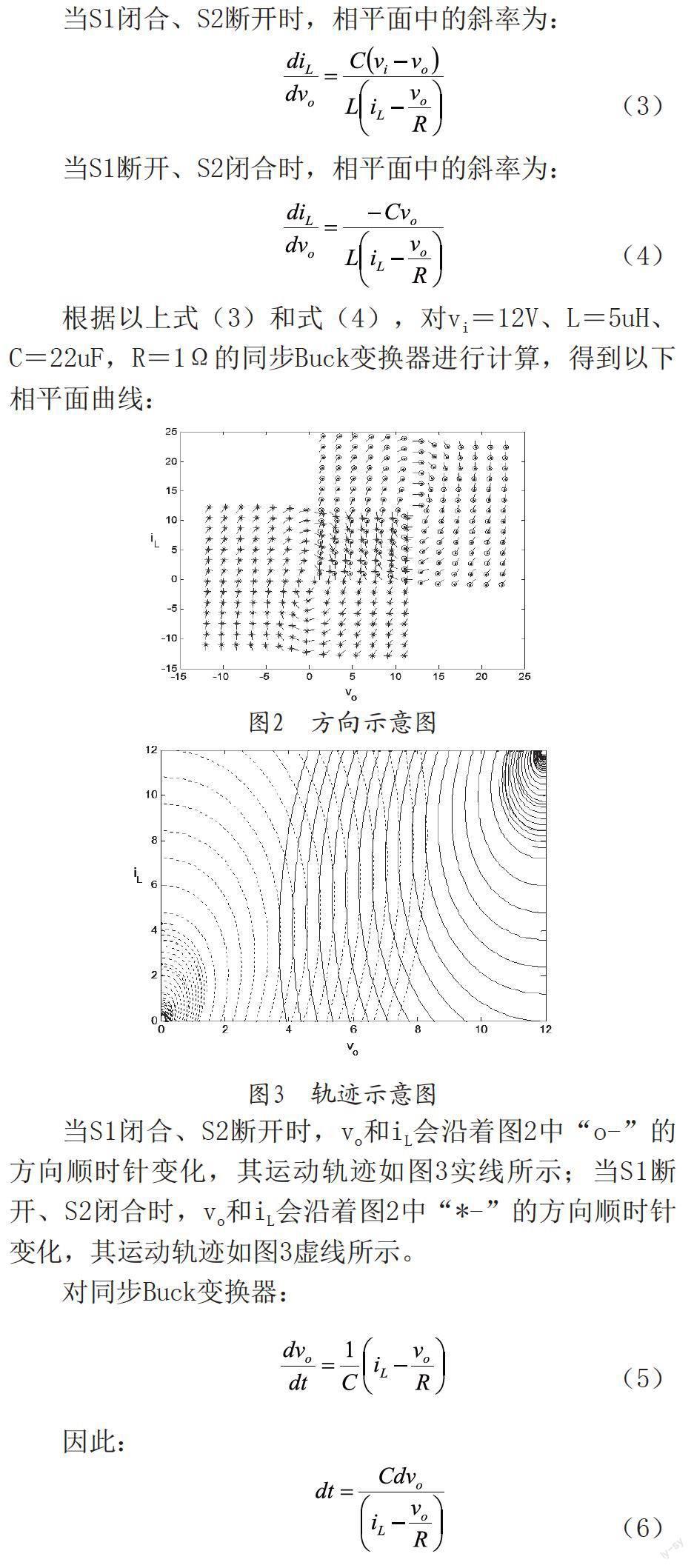
根據以上式(3)和式(4),對vi=12V、L=5uH、C=22uF,R=1Ω的同步Buck變換器進行計算,得到以下相平面曲線:
當S1閉合、S2斷開時,vo和iL會沿著圖2中“o-”的方向順時針變化,其運動軌跡如圖3實線所示;當S1斷開、S2閉合時,vo和iL會沿著圖2中“*-”的方向順時針變化,其運動軌跡如圖3虛線所示。
對同步Buck變換器:
式中:Δvo代表上述兩點間的vo的差;代表兩點間的平均電壓;兩點間的平均電流。
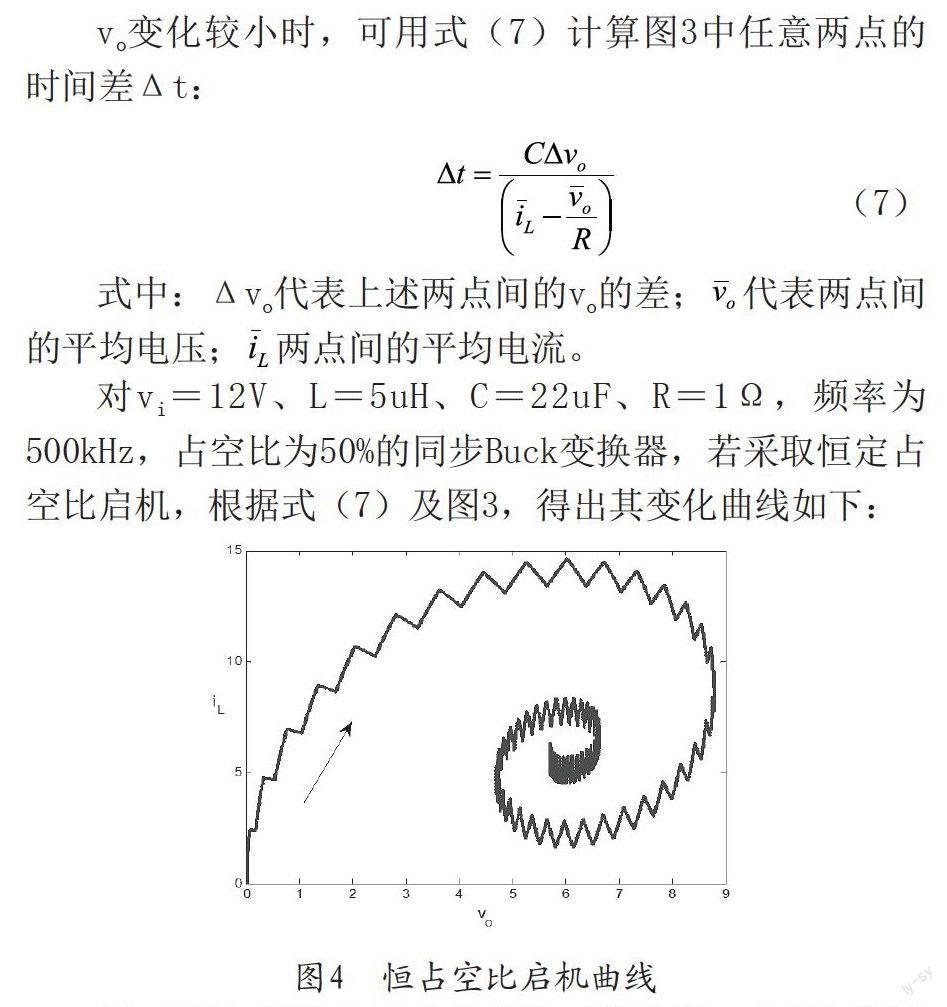
對vi=12V、L=5uH、C=22uF、R=1Ω,頻率為500kHz,占空比為50%的同步Buck變換器,若采取恒定占空比啟機,根據式(7)及圖3,得出其變化曲線如下:
圖4反映了同步Buck變換器啟動的過程。由于占空比為50%,因此輸出電壓穩定值為6V。vo從0V變化到8V,然后下降到6V,iL從0A上升到14A,然后回落到6A。
根據以上相平面圖,可以直觀地分析出vo和iL的變化過程,確定vo和iL的變化范圍和變化趨勢,為方案設計和元器件選擇提供依據。
4 結語
本文利用相平面法對Buck變換器進行分析,選取電流和電壓作為相平面坐標,分析其電流和電壓的變化過程,計算簡單、概念清晰,可以直觀地反映電流和電壓的變化過程。除了Buck變換器外,該方法還可以推廣到boost、Buck-boost等二階變換器。
參考文獻
[1] 嵇保健,洪峰,趙劍鋒.一種不隔離三電平雙Buck光伏并網逆變器[J].中國電機工程學報,2012,32(12).
[2] 閻鐵生,許建平,曹太強,等.基于二次型BuckPFC變換器的無頻閃無變壓器LED驅動電源[J].電工技術學報,2015,30(12).
[3] M.G.Kim.Proportional-Integral Compensator Design of Duty-Cycle-Controlled Buck LED Driver[J].IEEE Transactions on Power Electronics,2015,30(7).
[4] Ying-Chun Chuang.High-Efficiency ZCS Buck Converter for Rechargeable Batteries[J].IEEE Transactions on Industrial Electronics,2010,57(7).
[5] L.Shi,B.P.Baddipadiga,M.Ferdowsi,M.L.Crow.Improving the Dynamic Response of a Flying-Capacitor Three-Level Buck Converter[J].IEEE Transactions on Power Electronics,2013,28(5).
[6] 胡壽松.自動控制原理(第六版)[M].北京:科學出版社,2013.
[7] K.Sun,S.T.Lee,P.Zhang.An Adaptive Power System Equivalent for Real-Time Estimation of Stability Margin Using Phase-Plane Trajectories[J].IEEE Transactions on Power Systems,2011,26(2).