艦載機(jī)著艦任務(wù)下的飛行員建模研究
2016-05-23 08:30:30韓維趙振宇陳志剛
飛行力學(xué) 2016年1期
韓維, 趙振宇, 陳志剛
(海軍航空工程學(xué)院 飛行器工程系, 山東 煙臺(tái) 264000)
?
艦載機(jī)著艦任務(wù)下的飛行員建模研究
韓維, 趙振宇, 陳志剛
(海軍航空工程學(xué)院 飛行器工程系, 山東 煙臺(tái) 264000)
摘要:為研究艦載機(jī)在下滑著艦時(shí)飛行員的操縱策略,建立了著艦任務(wù)下的雙通道飛行員模型。以人工著艦時(shí)飛行員控制飛機(jī)進(jìn)行軌跡跟蹤為背景,以著艦時(shí)慣用的“反區(qū)”操縱技術(shù)為依據(jù),確立了艦載機(jī)飛行員控制律,并對(duì)控制增益參數(shù)進(jìn)行了自適應(yīng)設(shè)計(jì)。最后結(jié)合F-18A艦載機(jī),運(yùn)用SIMILINK軟件進(jìn)行了仿真。結(jié)果表明,該模型能很好地反映著艦任務(wù)下的飛行員操縱特性,可為飛行員著艦操縱提供參考。
關(guān)鍵詞:飛行員模型; 艦載飛機(jī); 增益參數(shù); 軌跡跟蹤
0引言
由于著艦環(huán)境的限制,艦載機(jī)著艦是一項(xiàng)極具風(fēng)險(xiǎn)和充滿(mǎn)挑戰(zhàn)的任務(wù),它要求飛行員必須擁有高超的操縱技術(shù)和豐富的駕駛經(jīng)驗(yàn)。大量飛行事故表明,在飛機(jī)著艦的最后20多秒是事故的多發(fā)段[1],因此需對(duì)著艦狀態(tài)下飛行員的控制行為進(jìn)行研究,其中飛行員模型的建立顯得尤為關(guān)鍵。
目前,關(guān)于著艦下滑任務(wù)下的飛行員建模研究相對(duì)較少。文獻(xiàn)[2]建立的跟蹤控制任務(wù)下的飛行員模型雖以人工著艦為背景,但僅對(duì)飛行員控制的油門(mén)桿通道進(jìn)行了研究,文獻(xiàn)[3]建立的著艦狀態(tài)下的飛行員模型僅涉及駕駛桿通道,二者建立的都屬于單通道模型,不能很好地用來(lái)研究著艦中飛行員的操縱行為。
本文主要以艦載機(jī)著艦下滑時(shí)的軌跡跟蹤為任務(wù)背景,建立了雙通道飛行員模型。該模型可用來(lái)研究飛行員著艦下滑的操縱行為,總結(jié)相應(yīng)的操縱策略,為飛行員著艦操縱提供參考。
1建模基礎(chǔ)
1.1飛行員操縱行為
飛行員操縱飛機(jī)的行為與所完成的任務(wù)是密切相關(guān)的。人機(jī)閉環(huán)控制按照飛行員采集信息的性質(zhì),通常分為補(bǔ)償系統(tǒng)、跟蹤系統(tǒng)、預(yù)先認(rèn)知系統(tǒng)和預(yù)先顯現(xiàn)系統(tǒng)[4]。在著艦任務(wù)下,主要涉及的是補(bǔ)償系統(tǒng)和跟蹤系統(tǒng)。 補(bǔ)償系統(tǒng)中,飛行員采集到的是系統(tǒng)的誤差信息,并根據(jù)采集到的信息不斷操縱飛機(jī),使飛機(jī)運(yùn)動(dòng)的實(shí)際值達(dá)到要求,如圖1(a)所示。跟蹤系統(tǒng)中,飛行員采集到的是系統(tǒng)的輸出變量和指令變量,同時(shí)前庭神經(jīng)系統(tǒng)還可以感知系統(tǒng)輸出的速率,大腦綜合這些信息來(lái)判斷系統(tǒng)的誤差及誤差變化率,并以此為依據(jù)操縱飛機(jī),如圖1(b)所示。
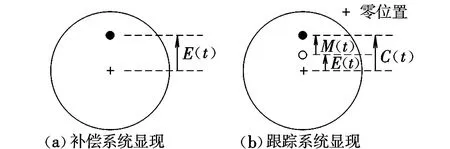
圖1 系統(tǒng)顯現(xiàn)示意圖Fig.1 Diagram of display system
1.2雙回路飛行員模型構(gòu)建
著艦時(shí),飛行員與艦載飛機(jī)系統(tǒng)組成一個(gè)復(fù)雜系統(tǒng)。為簡(jiǎn)化研究,只考慮艦載飛機(jī)著艦時(shí)的縱向操縱,此時(shí)飛行員通過(guò)操縱駕駛桿和油門(mén)桿來(lái)控制飛機(jī)。此外,假設(shè)飛行員接受3個(gè)信號(hào),并以此為基礎(chǔ)構(gòu)建雙回路飛行員模型。圖2為1個(gè)雙通道飛行員模型示意圖。
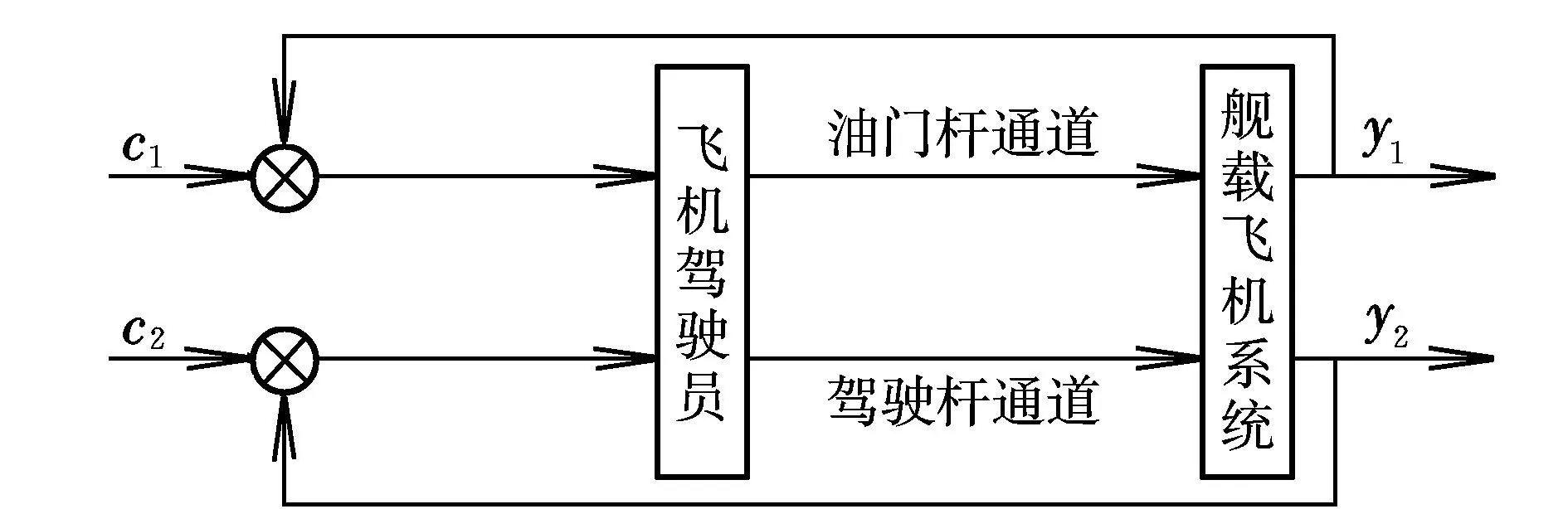
圖2 雙通道飛行員模型示意圖Fig.2 Duagram of double channels pilot model
由于飛行員精力的限制[5],將兩個(gè)通道分為主通道和副通道。主通道接受相對(duì)多的信息,并通過(guò)
綜合分析做出相對(duì)精確的操縱決策;副通道接受相對(duì)少的信息,做出的操縱決策相對(duì)簡(jiǎn)單。
在著艦下滑過(guò)程中,對(duì)飛機(jī)軌跡精度要求較高,飛行員要根據(jù)菲涅耳光學(xué)引導(dǎo)系統(tǒng)提供的信息不斷操縱飛機(jī)使其一直處于理想下滑道上,因此主通道反饋參數(shù)設(shè)為飛機(jī)的高度及高度變化率。此外,在下滑的整個(gè)過(guò)程中,飛行員還需對(duì)飛機(jī)姿態(tài)進(jìn)行保持。在航跡傾角不變的情況下,只要保持迎角的穩(wěn)定便可保持飛機(jī)姿態(tài)的穩(wěn)定,故將迎角作為飛機(jī)的副通道反饋參數(shù)。
由于艦載機(jī)著艦時(shí)速度大都小于有利速度,飛機(jī)處于速度“反區(qū)”飛行階段[6],此時(shí)飛行員大都通過(guò)操縱駕駛桿來(lái)改變飛機(jī)下沉率進(jìn)而進(jìn)行高度修正,通過(guò)駕駛桿保持飛機(jī)姿態(tài)。因此,將飛行員模型主通道輸出設(shè)為油門(mén)桿偏轉(zhuǎn)量,副通道輸出設(shè)為駕駛桿偏轉(zhuǎn)量。
2著艦下滑狀態(tài)的飛行員建模
2.1飛行員模型結(jié)構(gòu)配置
根據(jù)圖1,結(jié)合艦載飛機(jī)系統(tǒng)和菲涅耳光學(xué)引導(dǎo)系統(tǒng),構(gòu)建著艦下滑狀態(tài)下的飛行員模型如圖3所示。油門(mén)桿通道為主通道,飛行員在該通道中執(zhí)行“跟蹤”任務(wù);駕駛桿通道為副通道,執(zhí)行“補(bǔ)償”任務(wù)。
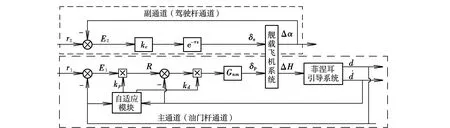
圖3 雙回路飛行員模型Fig.3 Double-loops pilot model

因此,可得出飛行員模型兩個(gè)回路的控制律分別為:
2.2操縱增益設(shè)計(jì)
文獻(xiàn)[2]在設(shè)計(jì)飛控增益時(shí),將增益參數(shù)設(shè)為定值,然而飛行員在實(shí)際操縱飛機(jī)時(shí),增益參數(shù)應(yīng)是一個(gè)自適應(yīng)調(diào)節(jié)的過(guò)程。下面對(duì)模型主通道的增益參數(shù)kp,kd進(jìn)行自適應(yīng)設(shè)計(jì)[9]。
由于主通道執(zhí)行的是“跟蹤任務(wù)”,故將被控對(duì)象視為:
(1)
式中:u為系統(tǒng)控制輸入;a1≥0,a2≥0,a>0。
系統(tǒng)跟蹤模型為:
(2)
式中:dm為模型輸出;r為系統(tǒng)指令輸入;b1,b2,b3為已知的正數(shù)。故可得誤差信息為:
(3)
由此可得:
(4)

(5)
其中:

定義:
(6)
系統(tǒng)主通道控制律如下:
因?yàn)镚nm為固定傳遞函數(shù),可以將其等效劃入飛機(jī)系統(tǒng),在控制律中不作考慮,令kpkd=k,則新的控制律可寫(xiě)為:
令δp=u,k=k0=-k1,kd=-k2,r1=r,則上式可改寫(xiě)為:
(7)
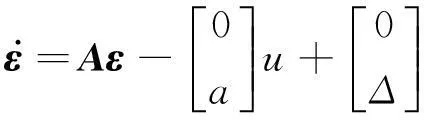
將式(7)代入式(4),可得:
(8)
為保證式(8)左邊趨近于0,設(shè)計(jì)Lyapunov函數(shù)[10]:
(9)
式中:λi>0;i=0,1,2。則:
(10)
結(jié)合式(5)~式(7),可得:
(11)
設(shè)增益參數(shù)自適應(yīng)律為:
引入遺傳算法[11]對(duì)x1,x2,λ1,λ2進(jìn)行優(yōu)化設(shè)計(jì),得出其值分別為:x1=0.40,x2=4.97,λ1=0.41,λ2=2.74。
3仿真驗(yàn)證
以F-18A艦載機(jī)著艦下滑為例[12],將駕駛桿限幅器取值為±2°,油門(mén)桿限幅器取值為±5°,速率限制器取為6 (°)/s。在飛機(jī)初始軌跡偏高H=10 m,即“肉球”偏高d=1時(shí),經(jīng)仿真可得飛機(jī)的響應(yīng)過(guò)程如圖4所示。
在飛機(jī)軌跡偏差變化時(shí), 增益參數(shù)也隨之變化,其變化情況如圖5所示。可以看出,在15 s時(shí)飛機(jī)的軌跡偏差基本消除。
飛機(jī)駕駛桿(Wa)和油門(mén)桿(δT)偏轉(zhuǎn)情況如圖6所示。可以看出:飛機(jī)駕駛桿的操縱比較平緩,而油門(mén)桿則快速短促;駕駛桿偏轉(zhuǎn)角度隨高度偏差的減小而減小,并且與油門(mén)桿的偏轉(zhuǎn)方向相反,屬于典型的“反區(qū)”操縱。
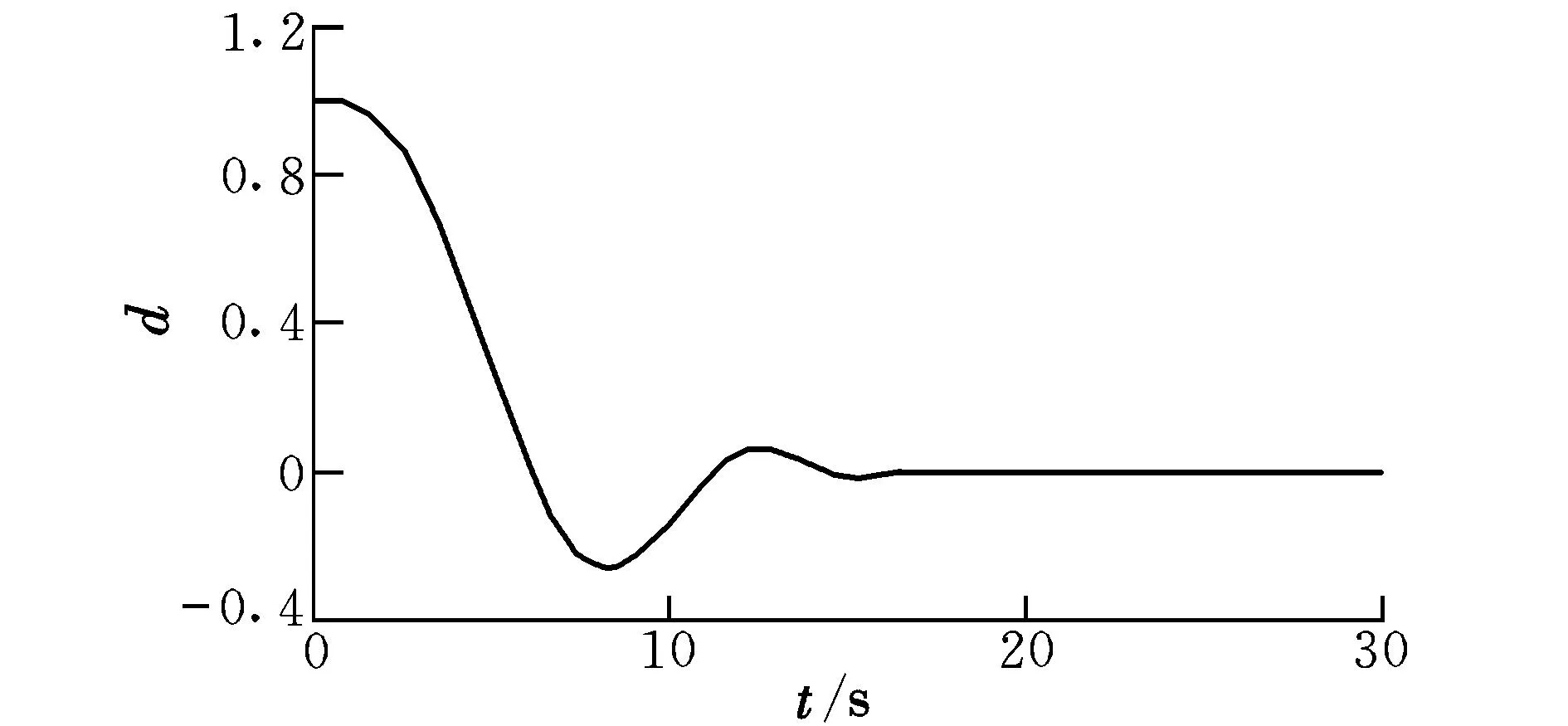
圖4 下滑軌跡響應(yīng)特性Fig.4 Glideslope response characteristics
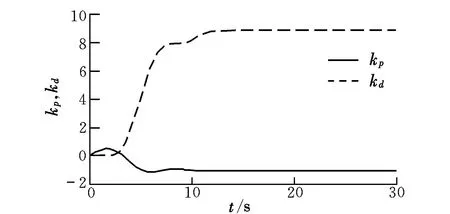
圖5 增益參數(shù)取值Fig.5 Gain parameter values
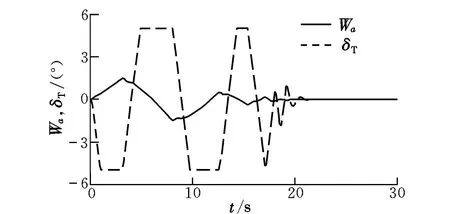
圖6 駕駛桿和油門(mén)桿偏轉(zhuǎn)量Fig.6 Stick and throttle lever deflections
若按照文獻(xiàn)[2]中的飛控增益設(shè)計(jì)方法,可得出kc=1,kp=0.62,kd=-3.2, 在飛機(jī)初始軌跡偏高H=10 m,即“肉球”偏高d=1時(shí),經(jīng)仿真可得飛機(jī)的響應(yīng)過(guò)程如圖7所示。
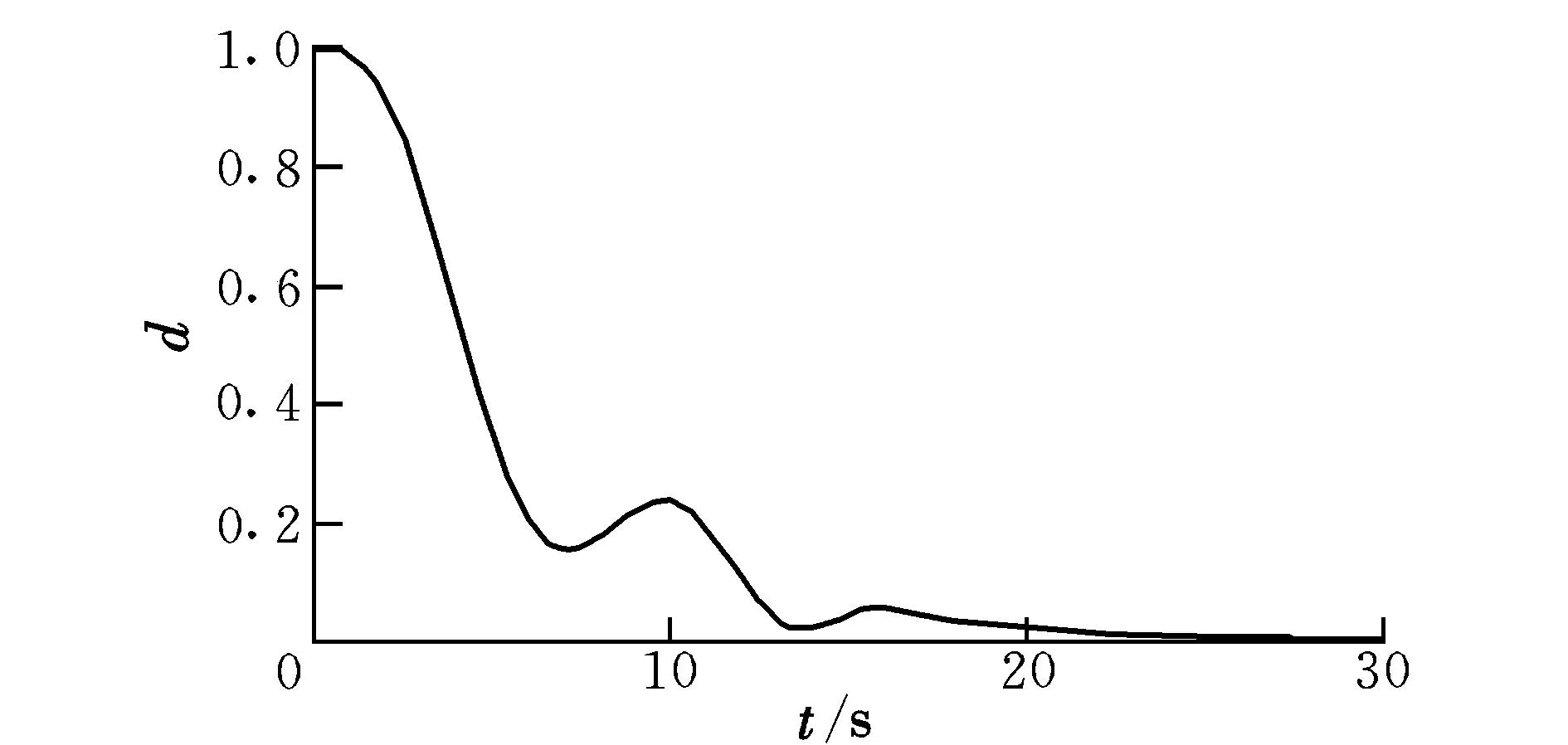
圖7 下滑軌跡響應(yīng)特性Fig.7 Glideslope response characteristics
可以看出,在經(jīng)過(guò)2次振蕩后,飛機(jī)在20 s時(shí)軌跡誤差接近于0,其調(diào)節(jié)時(shí)間明顯偏長(zhǎng)。
4結(jié)束語(yǔ)
本文對(duì)著艦下滑狀態(tài)下的雙回路飛行員模型進(jìn)行了建模研究,給出了模型的控制律,并對(duì)模型參數(shù)的設(shè)計(jì)方法進(jìn)行了改進(jìn)。仿真驗(yàn)證表明,模型所反映出的操縱特性與實(shí)測(cè)飛行員的操縱特性相近,可為飛行員著艦操縱提供參考。
參考文獻(xiàn):
[1]彭兢.艦載機(jī)進(jìn)艦著艦的自動(dòng)引導(dǎo)和控制研究[D].北京:北京航空航天大學(xué),2001:7-9.
[2]胡恩勇,袁鎖中,楊一棟.跟蹤控制狀態(tài)飛行員建模研究[J].飛行力學(xué),2008,26(4):11-13.
[3]朱齊丹,趙恩嬌,張?chǎng)?等.飛行員著艦縱向控制[J].計(jì)算機(jī)仿真,2013,5(5):112-116.
[4]徐浩軍,劉東亮,孟捷.基于系統(tǒng)仿真的飛行安全評(píng)估理論與方法[M].北京:國(guó)防工業(yè)出版社,2011:7-9.
[5]屈香菊.飛行員控制模型的建模研究[D].北京:北京航天航空大學(xué),2003:49-63.
[6]范曄,袁鎖中,楊一棟.著艦狀態(tài)飛行員控制策略研究[J].飛行力學(xué),2008,26(3):37-40.
[7]楊一棟.艦載飛機(jī)著艦引導(dǎo)與控制[M].南京:南京航空航天大學(xué)出版社,2007:76-79.
[8]Nalepka J P,Hinchman J L.Automated aerial refueling:extending the effectiveness of unmanned air vehicles[R].AIAA-2005-6005,2005.
[9]劉強(qiáng),扈宏杰,劉金琨,等.高精度飛行仿真轉(zhuǎn)臺(tái)的魯棒自適應(yīng)控制[J].系統(tǒng)工程與電子技術(shù),2001,23(10):35-38.
[10]劉金琨.先進(jìn)PID控制MATLAB仿真[M].北京:電子工業(yè)出版社,2012:259-261.
[11]Iliff K W,Wang K C.Extraction of lateral-directional stability and control derivatives for the basic F-18 aircraft at high angles of attack[R].NASA Technical Memorandum 4786,1997.
[12]史峰,王輝,郁磊,等.MATLAB智能算法30個(gè)案例分析[M].北京:北京航空航天大學(xué)出版社,2012:50-56.
(編輯:崔立峰)
Research on modeling of the pilot for carrier landing task
HAN Wei, ZHAO Zhen-yu, CHEN Zhi-gang
(Department of Airborne Vehicle Engineering, NAEI, Yantai 264001, China)
Abstract:To study the pilot control strategy in carrier landing, a double-channels pilot model for carrier landing task is established. The pilot control law is established based on the “backside” control technique which is used to realize path tracking with the manual controlled carrier landing as the background, and the gain parameter of the pilot model are adaptively designed. Simulation validation is finally processed with the SIMILINK software combined with F-18A aircraft. The result shows that the pilot model can reflect the pilot control characteristics and provide references to pilots for carrier landing.
Key words:pilot model; carrier aircraft; gain parameter; path pursuit
中圖分類(lèi)號(hào):V212.12
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1002-0853(2016)01-0014-04
作者簡(jiǎn)介:韓維(1970-),湖南湘潭人,教授,博士生導(dǎo)師,博士,研究方向?yàn)轱w行器動(dòng)力學(xué)。
收稿日期:2015-05-29;
修訂日期:2015-09-02; 網(wǎng)絡(luò)出版時(shí)間:2015-09-25 15:23
