低成本車載車聯網終端實現方式研究
2016-05-18 08:19:02段金亮龔存昊許東輝
汽車實用技術 2016年7期
段金亮,龔存昊,許東輝
(安徽江淮汽車股份有限公司技術中心,安徽 合肥 230601)
汽車電子
低成本車載車聯網終端實現方式研究
段金亮,龔存昊,許東輝
(安徽江淮汽車股份有限公司技術中心,安徽 合肥 230601)
文章首先介紹了車聯網系統的組成和主要實現的功能,然后闡述了整車CAN總線網絡在乘用車領域的應用情況。介紹了車聯網系統在診斷技術應用中的實現方式和UDS統一診斷協議中的主要服務協議。列舉了傳統車聯網終端的實現方式的不足之處,最后詳細闡述了集成式車輛網終端的實現可行性分析,具備成本低、易推廣等優點,同時給出了集成式終端的系統框圖方案。
Telematics;診斷;車身控制器;汽車
CLC NO.:U463.6 Document Code: A Article ID: 1671-7988 (2016)07-141-03
1、概述
Telematics車聯網在汽車領域的應用越來越廣泛,為車主提供駕駛、生活所必需的各種信息。通常所說的Telematics車聯網系統就是指應用無線通信技術的車載電腦系統,汽車行駛中出現故障時,通過無線通信連接服務中心,進行遠程車輛診斷,內置在汽車中的計算機記錄汽車主要部件的狀態,并隨時為維修人員提供準確的故障位置和原因。汽車通過終端機接收信息并產看交通地圖、路況介紹、交通信息、安全與治安服務、以及信息與娛樂服務等。目前,車聯網系統在汽車領域中正被逐漸應用。
一個車聯網系統主要包含三部分:車載終端(T-Box)、通信網絡、后臺系統。系統框圖如圖1所示:
T-Box作為車載終端安置在汽車內,擔負著數據發送和接收的重任,是車輛實現車聯網生態模式不可或缺的組成部分。通常其作為單獨終端裝置存在于車內,本文將重點研究T-Box的優化實現方式。
2、整車通信網絡化
CAN是控制器局域網絡(Controller Area Network)的縮寫,由BOSCH公司在1986年推出。隨著汽車技術的日益發展,汽車新產品開發平臺化程度越來越高。同時由于汽車需要共享的信息增長迅速,所以汽車中搭載了越來越多的ECU模塊。ECU模塊彼此之間交互功能日益頻繁,傳統的線束方式由于其成本較高,構造復雜,而采用網絡總線技術可以較完美的解決該項問題,降低了成本的同時也減少了總線線束的長度和種類。而相較于目前有些整車或零部件廠商使用的Flexray協議,CAN總線技術成熟,成本低廉,實時性和靈活性高,已經成為了汽車制造領域內使用范圍最廣的一種總線協議。在國內外大多數的整車企業中,已經成為了主流的控制器聯網方式。
一個典型的汽車CAN總線網絡系統拓撲圖如圖2所示:
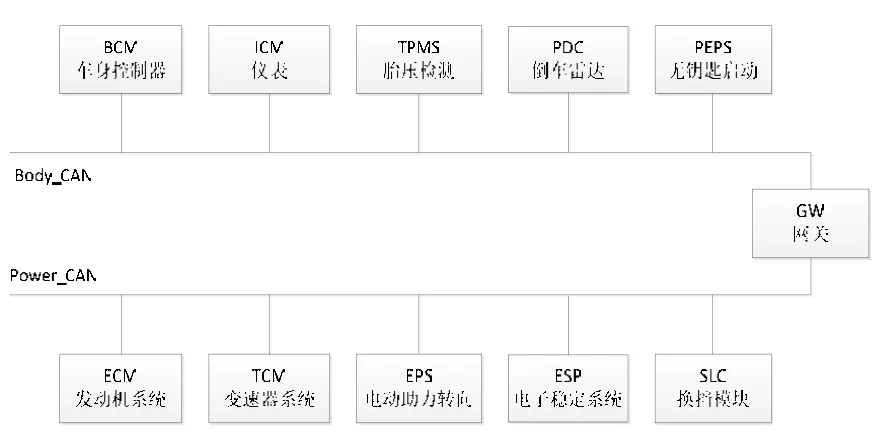
圖2 某汽車總線網絡拓撲圖
在CAN總線網絡中,各個節點之間的信息通信采用多主廣播方式,將T-Box連接到整車CAN總線網絡系統中個,使整車各個節點模塊與T-Box之間進行大量信息交互成為可能。事實上,再目前多數車聯網應用中,車載終端也是通過整車網絡數據總線獲取需求的信息數據。
3、車聯網診斷技術
車聯網中比較重要的功能就是對汽車整車或零部件模塊的故障診斷。診斷模式為車載終端通過連接CAN數據總線對目標節點發送診斷指令,目標節點反饋故障診斷信息,車載終端將故障信息儲存、顯示、上傳。
隨著CAN線成為主流通信模式, ISO14229即UDS(統一診斷服務)應運而生,當前在讀取故障代碼的基礎上,還可以通過相應的診斷指令對某個ECU進行動作測試、實時數據讀取、標定學習、軟件刷新等。
由于UDS協議能夠廣泛應用于多種總線制式上,其已成為了眾多整車廠使用的對象。UDS協議定義了許多診斷服務,表1中列舉比較常見或常用的診斷服務:

表1 常用的診斷通信功能服務
T-Box執行診斷工作的流程,如圖3所示:
①車載終端使用UDS診斷服務指令通過CAN總線向對象ECU發送相應的指令請求;
②ECU對此進行響應,將數據發給車載終端;
③車載終端存儲這些數據,或是將這些數據上傳至平臺。

圖3 T-Box診斷工作流程
4、車載終端實現方式研究
4.1 傳統車聯網終端
在當前主流的搭載方式如下圖4-1所示,在整車上增加單獨的終端裝置,用于實現車聯網相關功能。

圖4
4.2 本文研究方式
與車身控制器(BCM)節點集成。如圖4-2所示。下面進一步說明圖4-1與圖4-2中不同車聯網終端搭載方式之間的優劣對比:
傳統的車聯網終端搭載方式的不足:
①結構:需要單獨考慮自身結構以及在車身上的布置位置;
②線束:增加與T-Box模塊連接的線束及其在車身上的布置和走向;
③成本:單獨模塊成本較高,不利于在所有車型上配置,目前應用車聯網系統的較多為高檔車型。
考慮到傳統車聯網終端搭載方式的問題,而BCM幾乎在全系車型中都普遍存在,且均連接整車通信網絡,其外部環境在整車環境中已經必然存在。改進后的車聯網終端搭載方式集成T-Box功能后,外部結構及線束不需要額外增加,僅從內部結構上,需要增加與無線通信相關的硬件,如3G/4G模塊,診斷通信功能主芯片已經存在這些功能。
基于上述前提條件,以及新實現方式的種種優勢,下面就具體實現方式進行闡述。因為BCM已經存在如MCU在內的多數常用模塊,具備了網絡通信、診斷的功能或條件。在此基礎上,根據T-Box模塊的功能需求,在BCM上增加無線通信模塊和GPS模塊,分別用于實現遠程數據的接收和上傳以及定位功能。集成式模塊的系統框圖如下圖所示。

圖5 集成式模板系統框圖
5、結論
傳統T-Box作為獨立模塊搭載在汽車上,由于成本壓力未能在全系車型上廣泛配置。而因為配置這一模塊則需要單獨計算安裝位置等結構數據,為整車開發增加研發投入。BCM作為整車普遍搭載的控制器,集成T-Box本身功能僅需要增加如無線通信等模塊單元,免去外部結構、線束等諸多考慮因素,節省單獨T-Box模塊所帶來的成本投入,便于在低中高檔所有車型上普及使用。
[1] 胡艷峰,唐鍵,鄒利寧.基于CANoe的汽車CAN總線通信及診斷設計[J].汽車電器,2015,6:10-14.
[2] 麥克斯,汽車第二代車載診斷系統詳解[M],北京:北京機械工業出版社,2007.
[3] International Organization for Standards ISO14229-1,Road vehicles-Unified Diagnostic Services[S].2006.
[4] 常姍姍.第四代移動通訊技術在車聯網中的應用[J],通信與網絡,2016.1:51-52.
[5] 周立夫,金曉華,劉晨曦等.Telematics車載終端CAN通訊收發電路的電磁兼容性設計[J].汽車實用技術.2015.9:80-83.
[6] 高正東, 汪煒, 一種汽車遠程故障診斷儀TBOX的設計和實現[J].今日電子.2013.12:58-61.
Lowcost On-board Vehicle Network Terminal Research
Duan Jinliang, Gong Cunhao, Xu Donghui
(Anhui Jianghuai Automobile Co. Ltd.Technical Center, Anhui Hefei 230601)
The article first introduced the Telematics system composition and the main function. Expounds the vehicle CAN bus network application in passenger vehicle poduct realization. Telematics system are introduced in the diagnosis of technical application is implemented and UDS diagmostic protocle,the main service. The article enumerates the traditional shortcomings of the T-Box. Finally expounds the feasibility of integrated mojules in detail, with low cost, easy popularization and application etc. Integrated terminal system block diagram is given.
Telematics; Diagnosis; BCM; Automobile
U463.6
A
1671-7988(2016)07-141-03
段金亮,就職于安徽江淮汽車股份有限公司技術中心。
10.16638/j.cnki.1671-7988.2016.07.044
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
