基于TTE網絡的分布式智能數據采集系統設計
2016-05-14 05:01:34岳曉東
數字技術與應用 2016年5期
關鍵詞:數據采集
岳曉東
摘要:本文描述了一種基于TTE網絡的分布式高速數據采集系統設計,該系統可以高速完成各種總線信號(RS422、1553B、CAN、ARINC429等)及數字量等信號采集。系統具有高速采集、連線簡單、同步精度高等特點,具備較高的實用價值。數據采集在測控系統中具有很重要地位,可以為系統提供全方位的狀態數據,協助分析系統的健康狀態,及時發現系統中存在的問題,降低武器系統在使用過程中發生故障的概率。
關鍵詞:TTE網絡 分布式 數據采集
中圖分類號:TP393 文獻標識碼:A 文章編號:1007-9416(2016)05-0000-00
1 引言
目前,數據采集系統一般使用集中采集方式,被測系統通過電纜連接到數據采集設備,數據采集設備采用商用總線(VME、CPCI)等通用總線設計。雖然這種設計方便,但是這種系統存在較大的缺陷,主要表現在以下幾個方面:一是系統同步性差,采集到的數據往往是不同時刻值的數據,無法準確評估在同一個時間剖面內被測系統的工作狀態;二是系統實時性不高;三是系統布線復雜,可擴展性差。
針對上述問題,本文提出了一種基于TTE網絡的分布式智能數據采集系統。解決了傳統以太網以事件為觸發機制而存在的不確定性,繼承了傳統以太網的優點,同時還具有高實時性、確定性、高可靠性等特點。
2 系統實現
2.1 系統構成
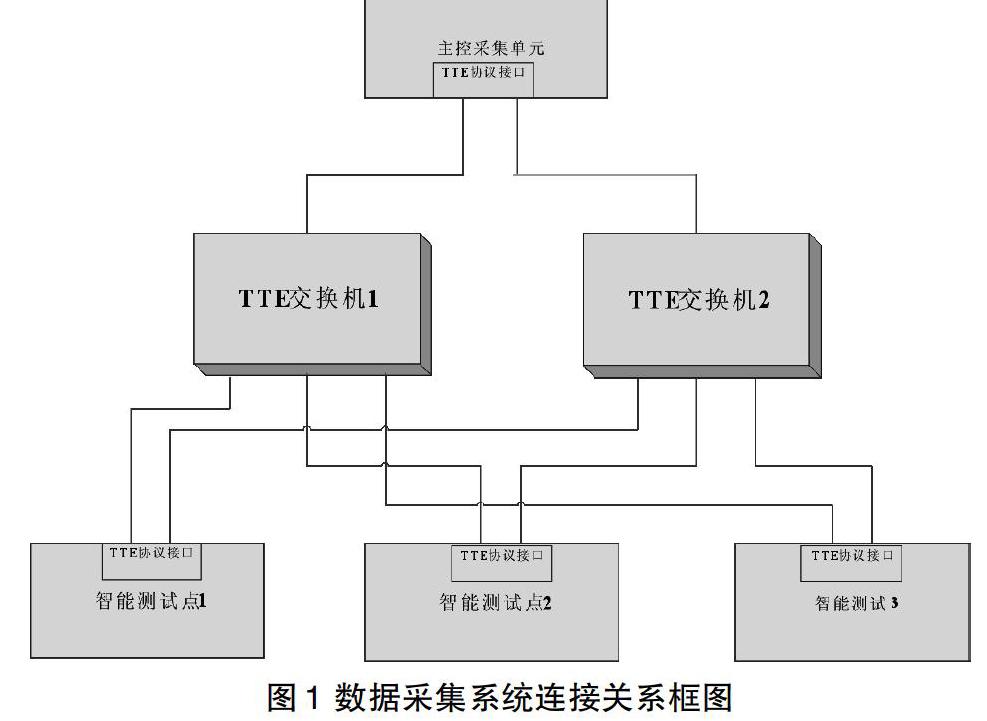
分布式智能數據采集系統采由一個主采集節點和若干個智能子節點組成,其組織原理如圖1所示。其中主采集節點是系統的控制核心,負責整個系統數據采集控制、數據存儲與傳輸、時鐘同步、系統管理等;智能子節點可以自主的完成規定的數據采集動作,實現數據的緩存,時間同步及采集數據上傳等功能。
分布式智能數據采集系統采用主采集節點統一授時,各個子節點在此授時的同步下完成數據采集動作,經理論分析和試驗驗證,系統的同步誤差小于1us。該系統可以為數據分析提供更加平滑的時間剖面,為分析被測系統在同一時刻下各個節點的狀態提供強有力的支撐。
2.2 主采集節點實現
主采集節點由主控單元、存儲單元及TTE接口協議單元組成。主控單元是系統的控制核心,對外接收數據采集方式配置并上傳系統工作狀態,對內控制采集系統的工作;存儲單元用于存儲采集到的數據,用于事后分析和處理。
主控單元接收上位機配置信息和控制指令,上傳系統工作狀態和關鍵數據。主控單元由ARM處理器、FPGA、電源系統等組成。ARM處理器完成主控單元事務處理工作。FPGA是控制的核心,數據采集系統的時間同步、數據接收、存儲等核心功能均由FPGA實現。存儲單元選用美光公司的NANDFLASH器件,設計容量可達64GB到512GB。
2.3 智能子節點實現
子節點實現具體的數據采集功能,周期的完成規定采集動作,并將采集數據通過光接口上傳到主采集節點。從功能上分為TTE接口協議單元和功能單元兩個部分。TTE接口協議單元實現同主采集節點的通訊,完成數據、狀態等信息的上傳和指令信息的接收;功能單元完成具體的數據采集,按類型可以分為總線數據采集、AD、開關量等。
3 結語
本文描述了一種分布式智能采集系統的設計,該系統具備實時性好、同步精度高等特點,經使用驗證,該系統工作穩定、可靠性高,可以應用于對數據采集要求較高的場合。
參考文獻
[1]劉帥,張喜民,何翔,劉作龍.基于TTE網絡的分布式系統分區同步方法.《航空計算技術》2014年01期.
[2] 賈琪明,李峭,熊華鋼.TTE網絡混合關鍵性通信的仿真與性能分析.《電光與控制》22卷9期.
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
