基于風力擺與PID算法的激光定位控制系統
2016-05-14 04:35:11古煒豪
數字技術與應用 2016年5期
古煒豪
摘要:文章給出了一個基于風力擺的激光定位控制系統的設計與構建,該閉環控制系統以STM32型單片機為控制核心,在平板上放置MPU6050傳感器、軸流風機為機械結構,并以LCD顯示屏與按鍵等模塊組成人機交互系統。在平板下方固定一激光筆,根據平板運動的角度、加速度、以及擺桿的長度之間的幾何函數關系,利用PID單環控制算法,達到控制激光定位的效果。
關鍵詞:風力擺 MPU6050 STM32 激光定位
中圖分類號:TP273 文獻標識碼:A 文章編號:1007-9416(2016)05-0000-00
現代檢測技術和自動控制理論的飛速發展,能夠使得人們設計高精度的控制系統,基于擺類的激光定位控制系統就是這些技術和理論的應用實例之一。[1]基于擺類的平板控制系統是為自動控制原理等基礎控制課程的教學實驗而設計的實驗設備,它是控制領域的一個經典實驗對象。[2]可見研究該系統能為自動控制理論的教學、實驗和科研構建良好的實驗平臺。
該系統利用風力擺實現對激光畫線的控制,控制激光畫出任意規定角度且任意長度的直線;停止時能在 5 s內制動;切換模式能畫出任意規定半徑的圓。
1 系統的總體方案設計
本系統采用PID單環算法控制。系統主要由檢測單元、STM32單片機、風力擺、人機交互界單元組成。系統框圖如圖1所示。
風力擺采用3只直流風機作為動力系統。三只風機為等邊三角形三邊,相背而立,互成 120°夾角。相對采用兩只風機動力較大,且與四只風機相比質量適中,不易損壞,但較難控制。
檢測單元采用高精度的陀螺加速度計 MPU6050 不斷采集風力擺姿態角數據。
2 系統理論分析與運算
本控制系統純為軸流風機驅動控制。利用軸流風機在不同電壓下風力的特性。MPU6050采集風力擺當前的姿態角,STM32處理姿態角信息調節對風機輸出PWM波,控制四只風機的工作狀態,從而實現對整體風力擺的控制。
2.1 風力擺運動控制分析
本系統采用 PID 算法來控制風機轉動的速度。風機開始工作后,MPU6050不斷采集當前風力擺姿態角狀態,并與之前的狀態比較,使得風力擺的運動狀態逐漸趨向于平穩。PID 算法控制器由風力擺轉動角度比例 P、角度誤差積分 I和角度微分 D 組成。
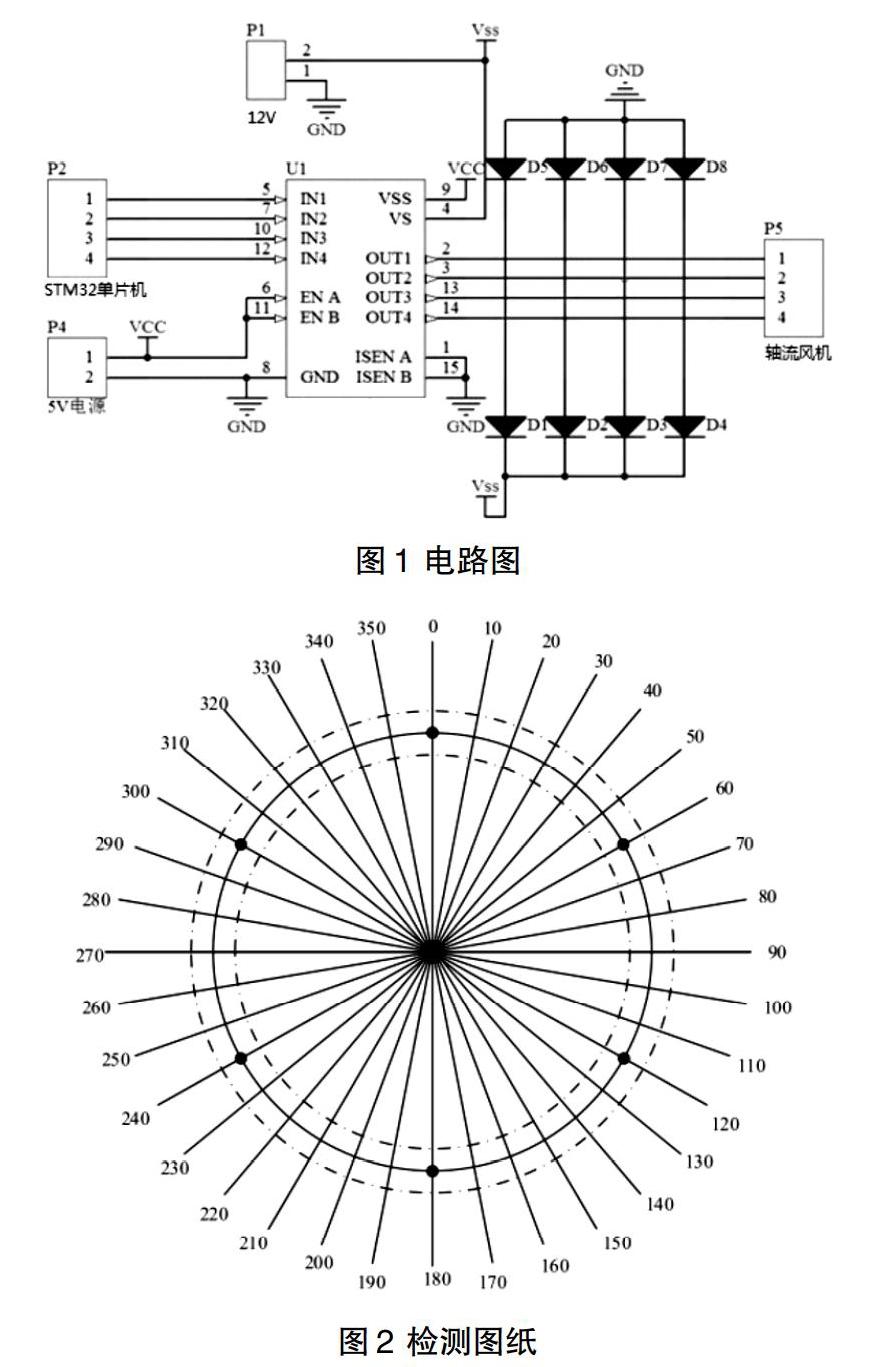
2.2 電路設計及其分析
根據軸流風機特性,系統采用采用雙LN298。有效解決電流過大問題。電路如圖2。
3 測試與結果分析
3.1 測量儀器
(1)秒表;(2)量角器;(3)檢測圖紙。如圖3所示。
3.2 測試方案及結果
完美實現項目要求,畫圓效果佳。
誤差分析:在測量長度和角度的測量過程中,由于工具的不精確和人為失誤會造成一定誤差;實驗數量不足夠導致一定誤差;機械構造的不穩定性會導致意外搖晃產生誤差;受外界風力和摩擦力的影響。
4 結語
采用PID算法在控制風力擺有顯著效果,閉環控制能過使擺類的線性誤差和時間誤差都接近理想值。
畫50cm定長測驗中最大誤差值不超過0.5cm,控制角度的誤差也能達到3°范圍以內,制動時能在5s內靜止,能畫出20~60cm規定直徑的圓。基本實現實驗的各項要求。
系統榮獲2015全國大學生電子設計大賽一等獎。
參考文獻
[1]王博,郝文昌,王志超等.自由擺平板控制系統的分析與設計[J].電子技術,2012(8):43-46.
WANG B, HAO W CH, WANG ZH CH, et al. Analy-sis and design of a free pendulumflat-panel control sys-tem[J].Electronic Technology,2012(8):43-46.
[2]李真,張玉兵,韓晶晶 等.基于自由擺的平板控制系統[J].傳感器世界,2012(1):13-16.
LI ZH, ZHANG Y B, HAN J J, et al. Panel controlsystem based on the free pendulum[J].Sensor World,2012(1):13-16.
