基于多源感知數據融合的危化場所火災預警與保護研究
2016-05-14 03:04:59王亮
數字技術與應用 2016年5期
關鍵詞:融合
王亮

摘要:為貫徹“預防為主、防消結合”的消防方針,實現對危化場實時的監控,且當發生火災時能夠及時預警并滅火的目的,本文以油庫為仿真背景,研究并設計了一個基于多源感知數據融合的危化場所火災預警與保護系統。首先闡述了多源數據融合的相關內容,并從油品特性等方面分析了油庫的危險性,其次分析了單一傳感器在石油罐區安全監控中容易受到外界因素從而產生較大誤差,驗證了多源感知信息融合在危化場所應用的必要性,最后介紹該系統的整體軟硬件設計,得到石油罐區安全監控數據融合模型,為進一步實踐打下了基礎。
關鍵詞:多源數據 融合 危化場所 火災
中圖分類號: TP393 文獻標識碼:A 文章編號:1007-9416(2016)05-0000-00
傳統對于危化場所區域的安全監控,如對場所內存儲罐的液位、溫度、壓力和可燃氣體等的監控和檢測,都是通過單一的傳感器完成的。單一傳感器在復雜的罐區環境下很容易受到外界的干擾,或是由于設備的老化而導致測量上的誤差,這樣管理人員將很難判斷出罐區的安全狀態。此外,傳統的監測方法未對消防設備的自檢功能有所要求,這樣可能因消防設備長時間不啟動而造成腐蝕、老化等后果,為火災埋下了安全隱患。所以將多源數據融合的技術應用于危化場所的火災預警與保護的系統中,研究如何進一步提高油庫消防系統的安全預警與應急保障能力,具有十分重要的現實意義。
1相關研究工作
1.1 多源數據融合
多源數據融合(multi-source data fusion)又稱為多傳感器信息融合(multi-sensor information fusion),是20世紀70年代提出來的。多源數據融合技術研究的是如何將多源的數據信息或相關的輔助數據整合在一起,以得到比用單一的數據更準確、可靠的結果。
多源數據融合按融合的層次分為數據級融合,特征級融合和決策級融合。本文中主要用到就是數據級的融合,首先利用多傳感器采集油罐周圍的環境信息,然后通過處理單元進行數據融合,提取目標的數據特征,得到屬性信息,最后輸出相應的決策信息并且驅動執行機構。特征級融合首先需要通過各個傳感器收集原始信息,然后對于每一組信息都提取一組特征信息,形成特征矢量,在聯合各個特征向量做出屬性判決。決策級融合是高層次的融合,先由每個傳感器基于自身所采集的數據作出決策,然后在融合中心完成的是局部決策的融合處理。
1.2 危化場所火災預警與保護
在油庫火災預警與保護系統中,采用多源數據融合技術和自動化技術相結合,利用多個傳感器采集油庫信息,可以有效的減小誤差,提高整個系統的可靠性和靈敏度。整個系統由以下幾部分構成:火源自動檢測部分、信息處理部分、監測部分、人機交互部分以及執行機構。分別起到檢測火災信息、對采集到的數據進行融合處理、實時顯示油庫情況、方便工作人員操控以及對火災預警和消防的作用。
2多源感知數據融合模型
對于底層數據級的融合過程,本文采用目前對于原始數據進行預處理的最優加權平均法進行數據級的融合過程,最優加權平均法考慮了不同傳感器所測量數據在最終決策過程中的重要性評價,同時對于整個多源數據融合系統的魯棒性具有較好的提升與改進作用;此外,基于最優加權方法的數據融合過程對于多源測量信息數據的輸入變量數量要求簡單,一般以多源傳感器測量噪聲的方差進行估計模型的構建。考慮有個傳感器對同一環境參數值進行協同感知過程,假設第個傳感器的測量方差為:(),其中為待測參數的真實值,為測量的實際值,為測量的噪聲值,其中測量噪聲值的數學期望為0,方差為。令各個不同傳感器的加權因子為權值矢量為,。通過構建加權均方差誤差最小值方差,求得加權估計的均方誤差為:
通過對上式可以看出,若測量噪聲值的方差越小,則其對應的傳感器的權值就越大,對應的測量數據在加權估計值中的比例就會高一些;反之,則其比例就會低一些,即就會越小。在二級數據融合過程中,采用基于PSO-BP神經網絡進行建模過程,其中BP神經網絡屬于前饋式網絡,其可以以任意的精度逼近任何非線性連續函數,同時其具有較好的自適應和容錯能力而被廣泛應用于故障診斷與非線性系統的建模與辨識中;PSO是經典的智能優化算法,在PSO-BP神經網絡中用以優化BP神經網絡的各個權值,以有效提升BP神經網絡的建模精度。
3系統設計
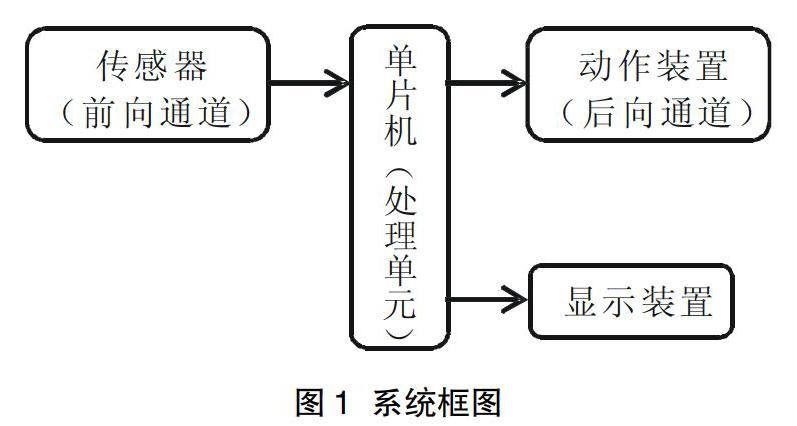
本系統以油庫為仿真背景,采用多傳感器檢測油庫的各項環境數據,并通過多源數據融合技術進行數據處理,最后輸出決策信息,能夠實現對火災預警和保護的目的,同時通過自動巡檢,減輕并消除了傳統的消防設備需要定期檢修、保養,以及設備長期不使用而帶來的潛在故障增加等問題。本系統主要分為前向通道、處理單元、后向通道和顯示裝置四大部分,系統框圖如圖1所示。
3.1 硬件系統設計
本系統的硬件部分主要由火災自動檢測系統、數據處理系統、火災預警系統、自動滅火系統、監控顯示系統和消防泵自動巡檢系統等多個子系統構成,其中火災自動檢測系統由可燃氣體檢測系統、火焰檢測系統和油罐溫度檢測系統組成。
火災自動檢測系統:即進行火源的探測,具備靈敏的采集信號的能力,包括溫度傳感器DS18B20、煙霧傳感器MQ2、紫外線傳感器和時間模塊DS1302。由于石油燃燒后能迅速釋放能量使環境的溫度升高,并且釋放大量煙霧,因此采用溫度傳感器、煙霧傳感器和紫外線傳感器分別采集油庫溫度、煙霧濃度和紫外線的信息。綜合這三個數據并與提前設定的閾值相比較,判斷是否有火災發生,減小了誤報警的可能性。
數據處理系統:單片機是信號處理單元,也是整個系統的核心部分。傳感器將采集到的信息經各自的A/D轉換器轉換數據格式后輸入單片機內,單片機根據設定的指令進行數據處理和閾值判斷,當有數據超過閾值時,單片機發出驅動指令使執行機構動作,否則不動作。本裝置采用STC12C5A60S2單片機模擬實現。
火災預警和自動滅火系統:包括聲光報警模塊、風機模塊和電機模塊。當單片機處理完數據確認有火災發生時,輸出驅動命令,各個執行機構動作,聲光報警模塊通過亮燈和聲響提醒人們火災發生安全疏散。風機模塊轉動對油庫降溫,同時驅散煙霧,采用低電平驅動小風扇實現。電機轉動帶動消防泵滅火,采用L298驅動模塊驅動電機,利用PWM波調節電機的轉速。消防設備還配備手動啟停的功能,以防止檢測系統發生異常不能及時檢測到火災的發生而造成無法挽回的后果。在整個預警和滅火過程中可實時監控油庫信息,直到數據低于閾值,解除預警并停止滅火。
監控顯示系統:利用LCD12864液晶顯示屏和與之匹配的按鍵模塊實現。能夠實時顯示各項指標,調節上限設置,當火災發生時也能直觀的顯示出來,方便工作人員監控和記錄。
消防泵自動巡檢系統:消防泵系統能夠周期性自檢,防止消防泵長期不啟動而出現功能性故障。本系統設定為每日早八點以低速自動啟動消防泵,20秒之后停止。
本系統由幾個模塊相互配合,從而在多源感知數據的基礎上,實現對整個油庫火災的預警和保護功能。
3.2 系統軟件設計
本系統采用STC12C5A60SA單片機作為核心處理器,搭配各個硬件模塊最終在顯示屏上顯示,共有初始化界面、時間顯示界面、參數顯示界面、閾值調整界面以及報警界面,主要負責將采集到的初始數據進行A/D轉換,并進行數據融合與判別。本系統的軟件程序中,將各個功能的程序模塊化,每個模塊都有其對應的子程序,再通過主程序連接貫通所有的子程序,使系統的各個模塊能夠結合完成所有的要求。
4仿真結果與分析
4.1 火災預警與保護系統的聯動工作流程
(1)信息采集:在油庫環境中,采用溫度傳感器、煙霧傳感器和紫外線傳感器檢測溫度、煙霧濃度和紫外線信息,并將該信息在顯示中心顯示。
(2)災情確認:當油庫范圍內的溫度傳感器檢測到罐體溫度過高,可燃氣體監控系統檢測到某區域的煙霧濃度超限或者是紫外線探測器探測到紫外線過多時,報警信號傳送到監控中心的報警器,發出聲光報警,確認發生火災。
(3)啟動滅火:當有災情發生的情況下,自動啟動滅火控制設備、降溫設備和驅散煙霧設備;如若系統因故障未能及時檢測到火災的發生,工作人員可通過手動開啟消防泵進行滅火。直到災情解除,報警和滅火設備關閉。
4.2 仿真結果
本設備性能主要由動作靈敏性和準確度兩方面來衡量。分別在通風環境下和封閉環境下進行模擬測試。因考慮到真實制造火災的危險性,所以該實驗僅模擬了火災情況的高溫和煙霧環境,用打火機點火測試,并且設定模擬溫度報警閾值為30.0℃,模擬煙霧報警閾值為5.00%。將該設備與單一傳感器設備分別在通風和封閉環境中進行比較實驗,實驗結果如表1和表2所示:
多源傳感器的火災預警與保護系統在每日早8時自動低速啟動消防泵進行自檢,20s后自動關閉。
5 結語
本文針對危化場所的火災預警與保護問題展開研究,利用多源感知數據融合技術,研究并設計了一個油庫全自動火災預警與保護裝置。本裝置利用多種傳感器對油庫進行檢測,仿真模擬實驗結果表明,本系統較單一傳感器系統的靈敏度有所提高,誤報率降低,并且具有自動巡檢的功能,降低了消防系統的故障率。本系統具有一定的應用價值。
參考文獻
[1]王婕,張網,呂東 等.易燃液體使用場所的火災危險性半定量評價[J].消防科學與技術,2010(1).
[2]吳永莉,孫金玲,羅雄麟.油田中心處理站火災和氣體監測報警系統設計[J].化工自動化及儀表,2013(2).
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
