大蒜種植機械結構設計方案初探
2016-05-14 12:51:30馮源
農機使用與維修 2016年6期
關鍵詞:結構設計
馮源
摘 要:目前,我國大蒜機械化種植發展緩慢,大蒜種植大部分為人工栽植,為了提高大蒜種植的勞動生產率,降低勞動強度,結合我國大蒜栽植的農藝要求,以及大蒜機械化種植的必要性,研究設計了一種新型大蒜種植機。重點闡述了大蒜種植機的主體結構與整機工作原理,以及相關核心部件的設計,并針對種植機關鍵機構的結構及其原理進行具體分析。
關鍵詞:大蒜;種植機械;結構設計
中圖分類號:S223.94 文獻標識碼:A doi:10.14031/j.cnki.njwx.2016.06.002
0 引言
目前,我國大蒜總種植面積33.3萬余hm2,占亞洲種植總面積的1/2,占世界總種植面積的1/3。但因大蒜種子體積較大、形狀不規則、種植時要求根部朝下等特殊性,導致普通種植機械很難滿足大蒜種植要求,因此,大蒜種植仍然以人工種植為主,勞動強度大,效率低。
通過查閱大量的國內外專利文獻可以看出,大蒜種植機械較多的集中在韓國、日本,其次是中國。國外的大蒜種植機械多采用旋耕或開溝后下種覆土,很少涉及蒜瓣直立種植問題。國內大蒜種植機械按種植方式可分為三類:第一類,大蒜點播機,多采用壓穴(錐形或半圓形)投種異步工作,其結構簡單,播種效率高,但牙尖朝向是隨機的;第二類,大蒜播種機,能夠保證大蒜尖部朝上,但必須由人工實現將蒜瓣擺放在蒜盒內,播種效率與人工相差無幾;第三類,全自動播種機,典型的是中國農科院研究的2ZD-5型自走式大蒜種植機,其種植效率是人工種植的25倍,但種植機械采用的開溝播種,不能滿足大蒜種植要求。經蒜農使用后反應其入溝后直立率不高,因此,該機型未能大面積推廣[1]。
1 大蒜種植機械整機設計方案初探
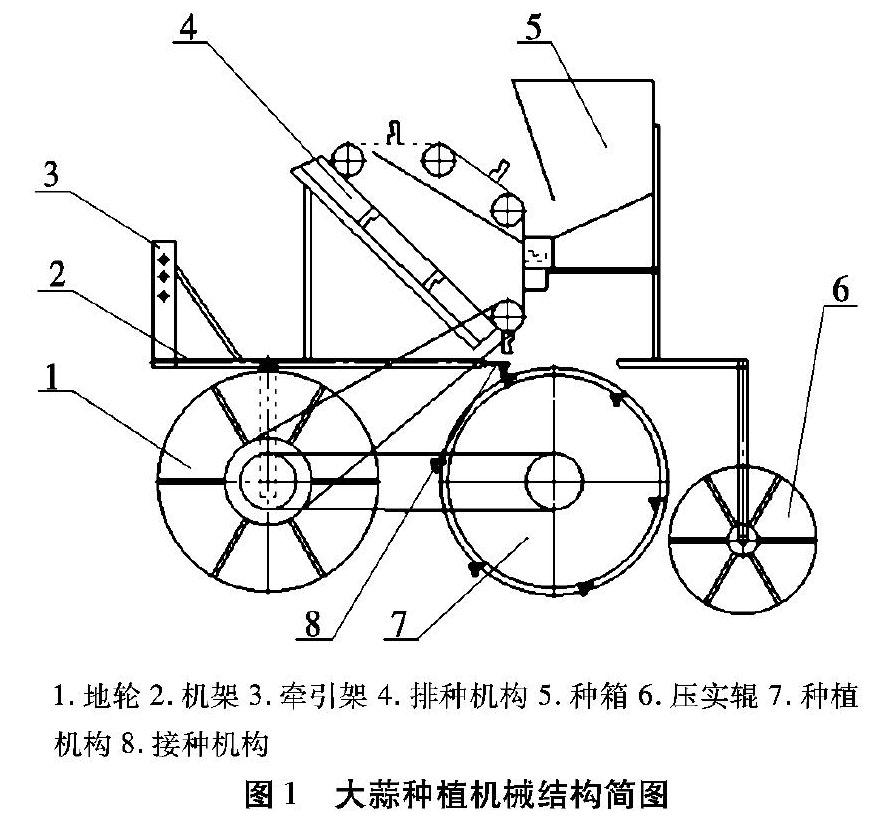
如圖1所示,大蒜種植機械整機由機架、種箱、排種機構、接種機構、種植機構、壓實輥、地輪及傳動裝置構成。其工作原理為:整機由四輪車牽引,動力通過地輪1傳遞給排種器4的主動鏈輪,主動鏈輪帶動鏈條運動,進而帶動固定于鏈條上的取蒜勺運動,取蒜勺在經過種箱5取蒜種,多余的蒜種在斜向上及水平運動過程中進行清種,實現單粒取種。之后取蒜勺傾斜,經過護種排種階段,將蒜種送入安裝在機架上的接種機構8的接種斗中。由接種斗將蒜種送入種植裝置7中的接種斗中的過程中完成蒜種的方向識別及掉頭。種植斗安裝在種植機構的驅動軸上,在行星輪系的帶動下,保證種植斗在運動過程中保持垂直向下的狀態,進而確保蒜種入土時的直立狀態,壓實輥6完成壓實與平整工作。
2 關鍵部件結構設計初探
2.1 種箱
種箱由種箱主體、種盒及導種管構成。種箱主體呈棱錐型,底部傾斜一定角度,便于蒜種從種箱主體中滑入種盒中,以及減少種箱主體中蒜種的剩余量。設計種盒的目的是在滿足取種要求的前提下減少取蒜勺對蒜種的摩擦,減少對蒜種外皮的損傷。種盒的數量由一次種植的行數決定,種盒下部開孔,并焊接一導蒜管,確保前一取蒜勺取蒜種時后一取蒜勺進入導蒜管,保證蒜種不脫落。
2.2 排種機構
排種機構的設計要滿足單瓣橫向取種。目前韓國專利現有的排種器形式主要有勺鏈式、轉勺式、振動式、斜圓盤式[2],國內除了以上幾種形式外還有轉筒式和夾持式等。綜合各種排種器的優缺點來看,勺鏈式的性能相對穩定。
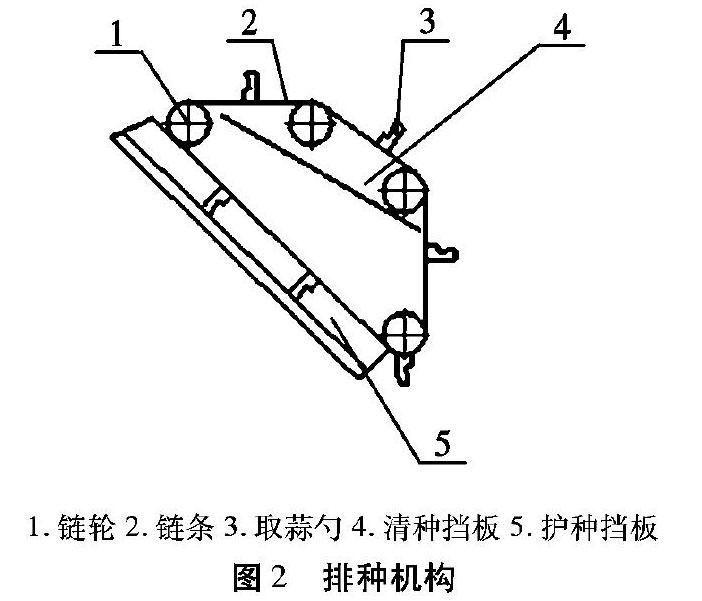
該大蒜種植機為兩行同時作業,每組排種單體的結構如圖2所示,由四個結構和齒數相同的鏈輪1、鏈條2、蒜勺3、清種擋板4,及護種擋板5構成。取蒜勺固定在鏈條上,是排種機構的關鍵部件,其結構性能的好壞直接影響取種的質量。取蒜勺的形式有橫向和縱向區分,但縱向取種效率低,因此本機采用橫向取種方式。取蒜勺的結構有勺體、勺柄、定量擋板構成,其中勺體與水平呈一定角度,該角度大于蒜種與勺體之間的摩擦角。蒜勺的具體尺寸由蒜種的平均尺寸來確定。
2.3 接種斗與種植斗
蒜種由于體積大、形狀不規則,種植時要求牙尖朝上、根部朝下的特殊要求,決定了大蒜種植機械應具備蒜種方向識別、掉頭以及直立種植的功能。大量的文獻顯示,蒜種方向識別有影像法、紅外線法、智能機器手法等。由于大蒜種植機械屬于農用機械,在作業過程中振動較大,上述提到的方法限于實驗室試驗,在實際中很難實施。本文根據蒜種形狀特點采用機械法,利用接種斗與種植斗的配合工作完成蒜種方向的識別、掉頭及直立種植。
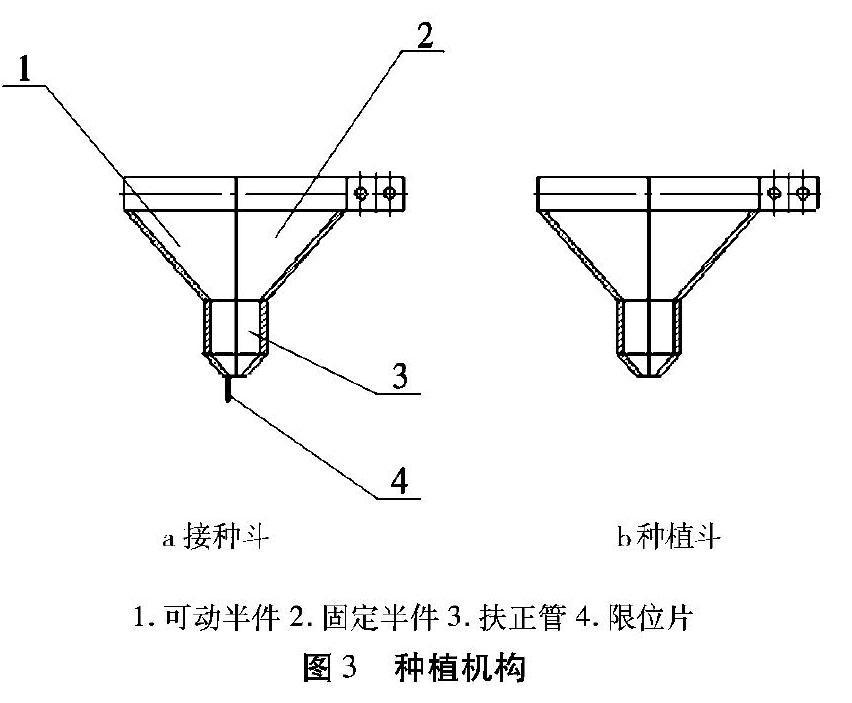
如圖3所示,接種斗a與種植斗b主體采用結構基本相同,兩者均由兩半件構成的漏斗形,一個半件為可動半件1,另一個為固定半件2。漏斗的上部分呈錐形為接種斗和種植斗的主體,下部分焊接一扶正管。扶正管底部開一小孔,孔的大小由蒜種的根部的平均尺寸決定(剛好卡住根部為好),接種斗的可動件下面焊接一限位片4。蒜種進入接種斗時,如根部朝下,當種植斗與接種斗的限位片接觸時,接種斗打開,蒜種滑入種植斗;當蒜種進入接種斗時如芽尖朝下,由于牙尖的尺寸小于根部的尺寸,會從孔中伸出,被種植斗壓住,當接種斗打開時蒜種會翻轉進入種植斗,實現掉頭。接種斗下焊接扶正管的目的是保證蒜種在接種斗中處于直立狀態,確保蒜種芽尖朝下時,種植斗能更好地壓住芽尖完成蒜種掉頭。種植斗下部焊接扶正管的目的是確保進入種植斗的蒜種處于直立狀態。當種植斗直立插入土中時,可動半件打開將蒜種垂直放入土中,完成直立種植。
3 小結
通過查閱大量的文獻,我們了解國內外大蒜種植機械現狀,綜合現有機型的優缺點,初步確定了大蒜種植機械整機結構及關鍵部件結構設計方案。目前該方案存在以下問題有待解決:
(1)取蒜勺從種箱中取蒜種時,如何進一步減小對蒜種外皮的損傷;
(2)如何確保進入接種斗的蒜種只能芽尖朝上或朝下兩種狀態;
(3)當蒜種芽尖朝下進入接種斗時,由于存在振動,種植斗與接種斗限位片接觸時能否保證剛好壓住芽尖。
參考文獻:
[1]郭英芳.大蒜種植機械中蒜瓣方向識別方法的研究[D].西北農林科技大學,2011.
[2]金磊.大蒜種植機械設計[D].北京:中國農業大學,2007.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
