基于ADAMS軟件的3-RPS并聯機器人動力學仿真
2013-03-21 08:03:58陳紅亮陳升芳羅玉峰
機床與液壓 2013年5期
陳紅亮,陳升芳,羅玉峰
(1.浙江水利水電專科學校,浙江杭州310018;2.杭州金宇電子有限公司,浙江杭州310018;3.南昌大學機電工程學院,江西南昌330031;4.新余學院,江西新余338031)
動力學響應分析是在機械系統驅動力(或力矩)和工作阻力給定的條件下,考慮到機械系統各構件的質量及其質量分布,求解該機械系統的真實運動的問題[1]。但是對于并聯機器人機構來說,其剛體動力學模型具有多變量、多參數耦合的特點,因而求解型式復雜,使動力學的求解時間長而難以滿足控制系統的實時性要求。不過借助于虛擬樣機技術,根據并聯機器人的運動要求,求解出機器人的動力學響應,可以起到事半功倍的作用[2-3]。
ADAMS軟件使用交互式圖形環境和零件庫、約束庫、力庫,創建完全參數化的機械系統幾何模型,其求解器采用多剛體系統動力學理論中的拉格朗日方程,建立系統的動力學方程,對虛擬機械系統進行靜力學、運動學和動力學分析,輸出位移、速度、加速度和反作用力曲線。ADAMS軟件的仿真可用于預測機械系統的性能、運動范圍、碰撞檢測、峰值載荷以及計算有限元的輸入載荷等[4-6]。文中以3-RPS型并聯機器人為對象,在ADAMS/View 環境中建立模型并進行動力學仿真分析,通過仿真快速準確求解動力學響應,對于研究并聯機器人系統動力學特性和控制有一定參考價值。
1 3-RPS機器人機構描述
如圖1所示,3-RPS機器人機構由定平臺A1A2A3、動平臺B1B2B3及連接兩個平臺的3個相同的分支組成。其中每個分支與動平臺由球副S 連接,與定平臺由轉動副R 連接,分支的上下兩個驅動桿由移動副P 連接組成。
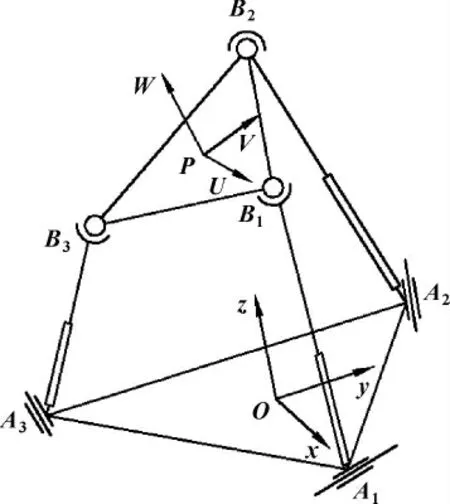
圖1 3-RPS機器人機構模型
該機構動平臺和定平臺都為正三角形,其外接圓半徑分別為r 和R。每個分支長度分別為L1、L2、L3。轉動副軸線呈切向布置于固定平臺平面內,驅動桿(分支)與轉動副軸線垂直,按右手法則建立定坐標系Oxyz 于固定平臺形心O,x軸由點O 指向點A1,y軸在定平臺表面垂直于x,z軸垂直于固定平臺表面向上;同樣建立動坐標系PUVW位于運動平臺形心P,U軸由點P 指向點B1,W軸垂直運動平臺表面向上。
2 已知運動軌跡求解驅動
在ADAMS/View 中建立該機器人模型,機構參數分別為:動平臺外接圓半徑r=480 mm,定平臺外接圓半徑R=800 mm,驅動桿長度600 mm。
假設機器人進行如下螺旋運動:z 方向以15t的速度向上運動,x 方向和y 方向分別以15×cos進行圓周運動。在機器人動平臺中心施加驅動。在ADAMS軟件中作10 s 200步的仿真,得到3個驅動桿的位移曲線圖分別如圖2—4所示。
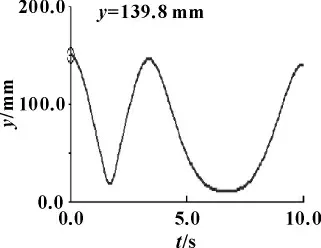
圖2 驅動桿1的位移曲線圖
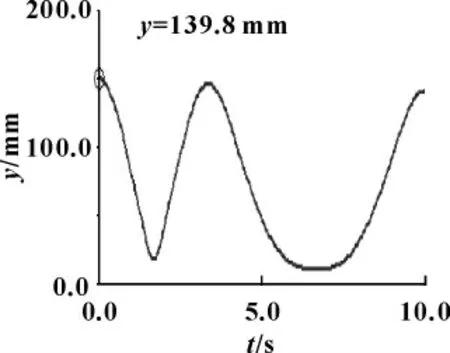
圖3 驅動桿2的位移曲線圖
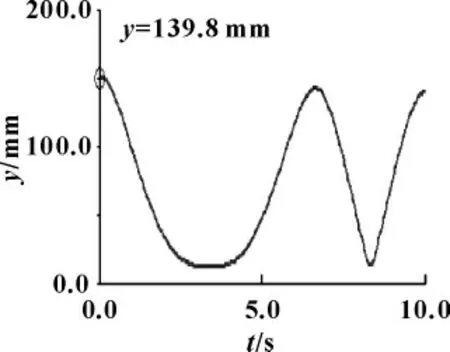
圖4 驅動桿3 的位移曲線圖
在ADAMS的后處理程序中,可以將該驅動曲線圖轉換為樣條曲線,進而求得并聯機器人機構的運動學逆解。
3 動力學分析
假設機器人為剛體結果,給機器人動平臺施加一個力,力的大小分別為,Fx=400 N,Fy=400 N,Fz=400 N。在ADAMS軟件中,可以求得驅動桿所需的驅動力隨時間變化的曲線圖,分別如圖5—7所示。
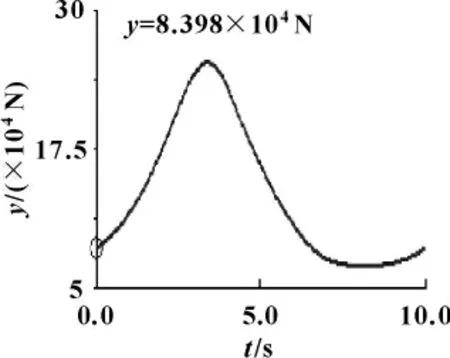
圖5 驅動桿1的驅動力
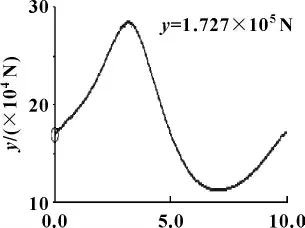
圖6 驅動桿2 的驅動力
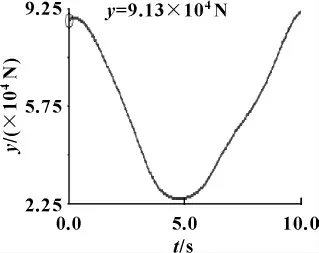
圖7 驅動桿3的驅動力
借助ADAMS軟件,還可以求得機構中各運動副的約束力隨時間變化的曲線。
4 結論
(1)用ADAMS軟件建立虛擬樣機模型來進行機器人的運動分析與動力分析,不必進行大量的編程工作,節省了大量的時間和人力。
(2)ADAMS軟件中由曲線轉化的樣條曲線精度非常高,因此利用該方法得到的并聯機器人的正解與逆解的精度也很高。這對于研制新型機器人機構有著重要的意義,可以驗證科研人員自編程序的正確性,也可以通過機器人運動規劃將求出的逆解用于物理樣機的驅動控制,從而節省科研人員的時間,降低機器人研發成本。
【1】羅玉峰,劉治志,石志新,等.一種機械系統動力學響應分析方法[J].工程設計學報,2008,15(1):1-5.
【2】陳紅亮,羅玉峰,楊廷力.基于虛擬樣機技術的并聯機器人優化設計[J].機床與液壓,2010,38(24):25-26.
【3】崔玉秀,田洪鈞,崔煒.基于ADAMS軟件的3-RRC并聯機器人運動學正解仿真分析[J].機械制造與研究,2008,37(1):68-70.
【4】陳立平,張云清,任衛群,等.機械系統動力學分析及ADAMS 應用教程[M].北京:清華大學出版社,2005.
【5】楊成文,張鐵.基于ADAMS的SCARA機器人運動學仿真研究[J].機床與液壓,2011,39(21):118-120.
【6】陳有清,李開明.基于Adams的3-(2SPS)并聯機構的配重平衡分析[J].機床與液壓,2011,39(11):29-32.