動態(tài)圖像跟蹤優(yōu)化算法的研究與仿真
2016-05-14 12:41:40睢丹侯德恒
現(xiàn)代電子技術(shù) 2016年6期
睢丹 侯德恒
摘 要: 傳統(tǒng)圖像跟蹤算法中,跟蹤的圖像搜索過程需要?dú)v遍所有特質(zhì),在圖像場景較為復(fù)雜的情況下,在“無用”匹配點(diǎn)上耗費(fèi)大量計(jì)算時(shí)間,跟蹤過程誤差較大。提出一種適用于復(fù)雜場景下動態(tài)圖像跟蹤優(yōu)化算法,選擇在復(fù)雜場景下魯棒性較強(qiáng)的參數(shù),以增加復(fù)雜場景下目標(biāo)描述的信息量和穩(wěn)定性;引入一種MAD(平均絕對差)匹配算法:在進(jìn)行動態(tài)圖像跟蹤過程中采用MAD算法和魯棒性參數(shù)相結(jié)合,通過動態(tài)幀圖像和靜態(tài)幀對比量即MCD(最多臨近點(diǎn)),設(shè)定跟蹤閾值,通過選取后的圖像實(shí)現(xiàn)動態(tài)圖像的運(yùn)動目標(biāo)跟蹤。仿真實(shí)驗(yàn)結(jié)果表明,提出方法的跟蹤精度對比傳統(tǒng)方法有明顯提高。
關(guān)鍵詞: 目標(biāo)跟蹤; 灰度直方圖; 邊緣梯度直方圖; 動態(tài)圖像跟蹤
中圖分類號: TN911?34 文獻(xiàn)標(biāo)識碼: A 文章編號: 1004?373X(2016)06?0098?03
Research and simulation of dynamic image tracking and optimization algorithm
SUI Dan, HOU Deheng
(School of Software Engineering, Anyang Normal University, Anyang 455000, China)
Abstract: The search process of the tracked image in traditional image tracking algorithm needs to traverse all idiosyncrasies, which expend a large amount of computing time on “useless” matching points in complex image scene, and result in big error in tracking process. A dynamic image tracking and optimization algorithm applied to complex scene is put forward. The parameter with strong robustness in complex scene was selected to increase the information quantity and stability of the goal description in complex scene. A MAD (mean absolute deviation) matching algorithm is introduced. The combination of MAD algorithm and robustness parameter is adopted in the process of dynamic image tracking. The tracking threshold is set by the contrast quantity (MCD) of the image static and dynamic frames. The selected image can realize the moving target tracking in dynamic image. The simulation experiment results show that the tracing precision of the proposed method is improved more obviously in comparison with that of traditional method.
Keywords: target tracking; gray histogram; edge gradient histogram; dynamic image tracking
0 引 言
動態(tài)目標(biāo)的圖像跟蹤技術(shù)是圖像處理領(lǐng)域一個(gè)非常重要的分支,該項(xiàng)技術(shù)廣泛應(yīng)用于軍事監(jiān)控、視覺導(dǎo)航、偵察預(yù)警、精確制導(dǎo)等軍事和民用領(lǐng)域[1]。動態(tài)目標(biāo)圖像跟蹤就是將高速運(yùn)動的物體圖像清晰的進(jìn)行位置計(jì)算,通過計(jì)算運(yùn)動物體的圖像,計(jì)算出跟蹤抓拍的目標(biāo)速度等參數(shù),將目標(biāo)物體捕獲。在對動態(tài)圖像進(jìn)行跟蹤的過程中,需要對動態(tài)圖像的單幀畫面逐一進(jìn)行計(jì)算以捕獲所需要的目標(biāo),如使用方法不當(dāng)很難在全部圖像中得到完整的動態(tài)圖像,跟蹤效果不好。在復(fù)雜背景的運(yùn)動環(huán)境中,對動態(tài)圖像的跟蹤計(jì)算更難,因此,在復(fù)雜背景條件下如何達(dá)到性能穩(wěn)定的目標(biāo)跟蹤效果,成為了該領(lǐng)域?qū)<已芯康闹攸c(diǎn)課題[2?4]。
傳統(tǒng)的動態(tài)圖像跟蹤方法有背景差分法[5]、幀間差分法[6]、光流法和基于區(qū)域的跟蹤方法等,但是都存在較大的應(yīng)用缺陷。文獻(xiàn)[7]中提到的基于動態(tài)特征圖像跟蹤方法,在進(jìn)行動態(tài)計(jì)算過程中使用的系統(tǒng)算法過于粗糙,運(yùn)動物體特征提取不明顯,速度參數(shù)及加速度計(jì)算和非勻速物體特征提取易產(chǎn)生困難。
1 基于復(fù)雜場景下動態(tài)圖像跟蹤優(yōu)化算法
1.1 跟蹤參數(shù)的選擇與計(jì)算
在動態(tài)圖像跟蹤過程中,傳統(tǒng)的方法多存在較大的缺陷,最關(guān)鍵的問題是無法解決復(fù)雜背景的干擾問題[8?10]。本文在對傳統(tǒng)算法進(jìn)行充分研究的基礎(chǔ)上,提出一種優(yōu)化方法,過程如下:
在跟蹤的過程中,采用對比度和色階兩種參數(shù)表達(dá)運(yùn)動圖像特征,并利用[HG]和[HOG]對對比度和色階兩種參數(shù)進(jìn)行建模。[HG]將動態(tài)圖像對比度空間分為[m]區(qū)域[(bin)],通過匹配算法對動態(tài)圖像區(qū)域[xii=1,2,…,n]進(jìn)行計(jì)算,其中,[n]是像素?cái)?shù)。將對應(yīng)的對比度和色階兩種參數(shù)直接映射。每一幀區(qū)域的圖像為:
[pu=C1i=1ngxihδui, u=1,2,…,m] (1)
式中:動態(tài)圖像常數(shù)[C1]為調(diào)節(jié)參數(shù);[g]為對比度函數(shù),其與[HOG]和[HG]的比值相關(guān);[h]為對比度寬度;[δui]為Kronecker參數(shù)。
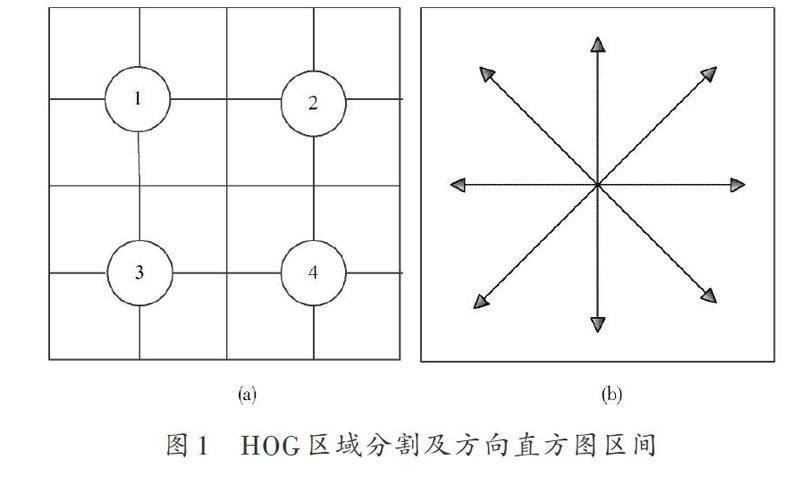
對動態(tài)圖像對比度進(jìn)行求解計(jì)算,可捕獲動態(tài)目標(biāo)圖像的色階特征。將動態(tài)目標(biāo)圖像大小設(shè)定為[36×36]的圖像,然后將靜態(tài)幀圖像分為4個(gè)[9×9]的子區(qū)域,分別記為區(qū)域名①~④,如圖1(a)所示。將每個(gè)子區(qū)域名進(jìn)行二維空間的8方向劃分,將不同區(qū)域標(biāo)記,分別標(biāo)記為1~8,如圖1(b)所示。
圖1 HOG區(qū)域分割及方向直方圖區(qū)間
計(jì)算動態(tài)目標(biāo)圖像數(shù)據(jù)區(qū)域中,每幀圖像數(shù)據(jù)值,將對比度和色階兩種參數(shù)映射到8個(gè)區(qū)域內(nèi),可得到對比度和色階兩種參數(shù)直方圖,與計(jì)算對比度和色階兩種參數(shù)方法類似。然后按照不同區(qū)域進(jìn)行的方法,將所有直方圖進(jìn)行組合計(jì)算,得到最優(yōu)區(qū)域解,然后計(jì)算里面的不同參數(shù),方法如下:
[I=G(σ,0)?I0] (2)
[dy=I(x+1,y)-I(x-1,y)] (3)
[dx=I(x,y+1)-I(x,y-1)] (4)
[θ(x,y)=αtan2(dy,dx) θ∈[0,2π]] (5)
其中:[I0]為靜態(tài)圖;[G(σ,0)]為動態(tài)目標(biāo)圖像經(jīng)過高斯濾波后的靜態(tài)環(huán)境圖;[I]為靜態(tài)環(huán)境圖像濾波后動態(tài)圖像;[I(x,y)]設(shè)定幀圖像;[θ(x,y)]為運(yùn)動目標(biāo)圖像運(yùn)動方向,具體值在[0~2π]范圍內(nèi)。
1.2 跟蹤的優(yōu)化過程實(shí)現(xiàn)
在應(yīng)對復(fù)雜背景的干擾下,引入一種MAD(平均絕對差)匹配算法:在進(jìn)行動態(tài)圖像跟蹤過程中采用MAD算法和第1.1節(jié)求出的參數(shù)相結(jié)合,通過動態(tài)幀圖像和靜態(tài)幀對比量即MCD(最多臨近點(diǎn)),具體計(jì)算方法如下:
設(shè)定動態(tài)圖像[T(x,y)]數(shù)據(jù)數(shù)量為[M×N],與其相鄰幀圖像大小的數(shù)據(jù)[S]的距離為:
[D(x,y)=x=1My=1NR(Tx,y,Sx,y)] (6)
其中:
[R(Tx,y,Sx,y)=1, Tx,y-Sx,y 具體步驟為:首先比較待匹配的兩幅圖像對應(yīng)像素點(diǎn)的灰度絕對差,如果這個(gè)絕對差小于某個(gè)確定的門限,就認(rèn)為這兩點(diǎn)相似;然后統(tǒng)計(jì)整幅圖像區(qū)域中,對應(yīng)點(diǎn)像素絕對差小于這個(gè)門限的數(shù)目,即可確定這兩幅圖像的相似程度。把這個(gè)數(shù)目定義為MCD距離,MCD越大說明兩幅圖像越相似,反之則越不相似。當(dāng)將模板圖像在目標(biāo)圖像內(nèi)滑動時(shí),統(tǒng)計(jì)每個(gè)位置處的圖像與模板圖像的MCD距離,可以得到整個(gè)圖像的一個(gè)相關(guān)曲面,最后尋找這個(gè)相關(guān)曲面的峰值即可確定最佳匹配位置。MCD算法的優(yōu)點(diǎn)在于其運(yùn)算量比較小,且對于局部灰度信息不存在突變的目標(biāo),跟蹤比較準(zhǔn)確。CCD拍攝圖像時(shí)由于拍攝過程中的抖動以及儀器自身的缺陷,其拍攝的圖像具有形變、遮擋、局部噪聲高等特點(diǎn),當(dāng)在這種復(fù)雜場景圖像中運(yùn)用MCD算法時(shí),容易產(chǎn)生誤匹配,針對此不足,需要進(jìn)行修正,即規(guī)一化: 對式(6)中的[D(x,y)]歸一化得到一個(gè)相似性測度[RD(x,y)]為: [RD(x,y)=D(x,y)(M×N)] (8) 將其歸一化后,即使局部圖像像素強(qiáng)度發(fā)生了變化,也可以將這種影響降到最低,克服復(fù)雜背景圖像時(shí),由于局部像素強(qiáng)度異常而產(chǎn)生誤匹配。 2 實(shí)驗(yàn)結(jié)果及分析 驗(yàn)證本文算法需要采集動態(tài)圖像,圖像的獲取是進(jìn)行跟蹤實(shí)驗(yàn)的前提條件,本文實(shí)驗(yàn)通過硬件設(shè)備CCD(Charge CouPled Device)攝像機(jī)和視頻采集卡硬件設(shè)備來實(shí)現(xiàn)的。 利用實(shí)際拍攝的坦克動態(tài)圖像對特征融合的效果進(jìn)行驗(yàn)證,并分別與傳統(tǒng)方法在復(fù)雜背景下的特征融合效果進(jìn)行比較。如圖2所示,坦克使用了沙漠迷彩涂裝,其灰度與地面灰度較為接近,因此傳統(tǒng)方法不能有效描述目標(biāo)特征,在第250幀跟蹤出現(xiàn)漂移,至第500幀完全丟失。采用本文方法進(jìn)行特征融合,如圖3所示,能夠較為明顯的分出目標(biāo)和背景,因此在整個(gè)動態(tài)圖像中都能較好地對目標(biāo)進(jìn)行跟蹤。 圖2 傳統(tǒng)方法下的目標(biāo)跟蹤結(jié)果 圖3 本文方法下的目標(biāo)跟蹤結(jié)果 利用背景差的傳統(tǒng)方法[11]與本文研究方法對同一匹配位置的運(yùn)行時(shí)間進(jìn)行比較,比較結(jié)果如圖4所示。 圖4 不同方法的準(zhǔn)確度對比 通過對圖4進(jìn)行對比分析能夠得知,利用本文方法與傳統(tǒng)方法分別進(jìn)行動態(tài)圖像跟蹤,實(shí)驗(yàn)結(jié)果表明,本文方法的跟蹤效果較傳統(tǒng)方法具有明顯優(yōu)勢。 3 結(jié) 語 本文提出一種基于復(fù)雜場景下特征動態(tài)圖像跟蹤優(yōu)化算法,采用了一種新的圖像間的相似性度量以實(shí)現(xiàn)動態(tài)圖像中的運(yùn)動目標(biāo)跟蹤。仿真實(shí)驗(yàn)結(jié)果表明,所提出方法的跟蹤速度和精度比傳統(tǒng)方法有明顯提高,證實(shí)了研究方法的可行性。 參考文獻(xiàn) [1] 楊衛(wèi)平,李智勇,沈振康,等.動態(tài)圖像分析[M].北京:國防工業(yè)出版社,1999. [2] 程淑紅.動態(tài)圖像目標(biāo)跟蹤算法研究[D].秦皇島:燕山大學(xué),2012. [3] 周顥.復(fù)雜背景下的運(yùn)動目標(biāo)分割和識別的關(guān)鍵技術(shù)研究[D].上海:上海交通大學(xué),2004. [4] 彭艷芳.視頻運(yùn)動目標(biāo)監(jiān)測與跟蹤算法研究[D].武漢:武漢理工大學(xué),2010. [5] 張廣超.動態(tài)圖像的自動跟蹤和識別技術(shù)研究[D].太原:中北大學(xué),2008. [6] 王江濤.基于視頻的目標(biāo)檢測、跟蹤及其行為識別研究[D].南京:南京理工大學(xué),2007. [7] 岑銀.智能視頻監(jiān)控中運(yùn)動目標(biāo)跟蹤技術(shù)研究[D].成都:西南交通大學(xué),2010. [8] LUCAS B D, KANADE T. An iterative image registration technique with an application to stereo vision [C]// Proceedings of Image Understanding Workshop. San Francisco: Morgan Kaufmann, 1981: 121?130. [9] TRIGGS B. Factorization methods for projective structure and motion [C]// Proceedings of 1996 IEEE Conference on Computer Vision and Pattern Recognition. [S.l.]: IEEE, 1996: 845?851. [10] STURM P, TRIGGS B. A factorization based algorithm for multi?image projective structure and motion [C]// Proceedings of 4th European Conference on Computer Vision. Cambridge: Springer Berlin Heidelberg, 1996: 709?720. [11] HAN M, KANADE T. Creating 3D models with uncalibrated cameras [C]// 2000 IEEE Workshop on Application of Computer Vision. [S.l.]: IEEE, 2000: 178?185.
