基于視頻輔助的無源RFID室內跟蹤技術
2016-05-14 10:33:51單廣翠馮燕茹
軟件工程 2016年7期
單廣翠 馮燕茹


摘 要:室內跟蹤定位技術中,RFID技術造價低、無接觸、識別快速,成為室內跟蹤定位的主要選擇。本文采用無源RFID跟蹤,通過信號強度信息推知目標和參考標簽的距離,給出目標的位置估計,然后結合網絡攝像頭在可見區域通過視頻圖像輔助對跟蹤目標進行精確定位,并給其在絕對坐標系中的坐標。最后將目標與RFID標簽坐標位置相比較,得到正確的目標位置和ID。
關鍵詞:室內跟蹤定位;無源RFID室內跟蹤;視頻輔助跟蹤
中圖分類號:TP391 文獻標識碼:A
1 引言(Introduction)
近年來,日常生活中基于跟蹤定位服務的應用越來越多,該服務分為兩大類:室外跟蹤和室內跟蹤[1]。室內跟蹤有著越來越廣泛的應用前景,例如樓宇內對特定人群的跟蹤,室內跟蹤可以在達到實時監護的目的地同時極大地解放人力[2]。
本論文著力于視頻輔助的無源RFID室內跟蹤,以RFID跟蹤為主,視頻精細定位為輔助,RFID定位通過提取目標標簽和參考標簽間的距離信息,并利用多組該數據結合參考標簽的和閱讀器的先驗位置信息,通過設立準則進行濾波從而給出移動目標的二維跟蹤軌跡[3,4]。再在可視區域,利用攝像頭視頻通過背景前景比對進行精細定位,系統原理如圖1所示。
tracking)
無源RFID的跟蹤原理如圖2所示,通過信號強度信息推知目標和參考標簽的距離,并通過一組距離信息,綜合參考標簽的絕對位置,給出目標的位置估計[5]。具體步驟:
(1)參考網格拓撲設計
參考標簽的網格分布拓撲形狀,決定了跟蹤精度和系統成本,單位面積內,密度越大精度越高,但成本越高[6,7]。需要進行優化設計,選取等效覆蓋密度相同但個數更少成本更低的參考網格的拓撲模式。一般使用的是正方形分布。
(2)信號強度參數提取
通過路徑損耗模型得到的信號強度值與距離的映射關系。信號在無線信道中的大尺度衰落用來表示。將表示為距離的函數,記作
其中,為路徑損耗指數,為已知的近處距離,作為參考距離,為標簽與閱讀器之間的距離。的取值大小依賴于傳播環境的不同,其具體的取值工作見表1。
由上式可得到閱讀器與標簽間距離關系,利用一組這樣的距離關系即可以進行標簽位置的計算。
(3)濾波跟蹤
采用具有防沖突功能的RFID閱讀器,保證每個時間幀可以檢測一個以上的無源標簽,算法可以擴展為多標簽跟蹤[8],如圖3所示。當距離信息已知時,通過濾波的方法跟蹤運動軌跡。但房間配置的影響和角度位置對標簽電磁波強度的影響是時變非線性系統,而粒子濾波可以跟蹤描述時變非線性系統,因此采用基于粒子濾波的SLAM方法進行跟蹤。
跟蹤的原理可用如下數學公式描述。設參考標簽為,代表節點序號。代表移動目標的二維位置狀態,為時間序號
則時刻的系統狀態表示為
給定系統狀態,目標標簽在邊界標簽先驗信息位置的前提下,從初始位置開始移動,當目標移動時,系統不斷接收到目標相對于參考點的距離信息,綜合該信息利用SLAM算法估計出目標路徑。觀測模型給出了相對于此刻位置的下一刻可能的目標位置。相應的貝葉斯濾波器可設計為一個概率密度函數,其中分別為實際狀態和觀測狀態。直接的觀測模型為
其中,是目標到參考標簽距離,是高斯噪聲。每個時間幀都可以得到目標相對于參考點的觀測信息。
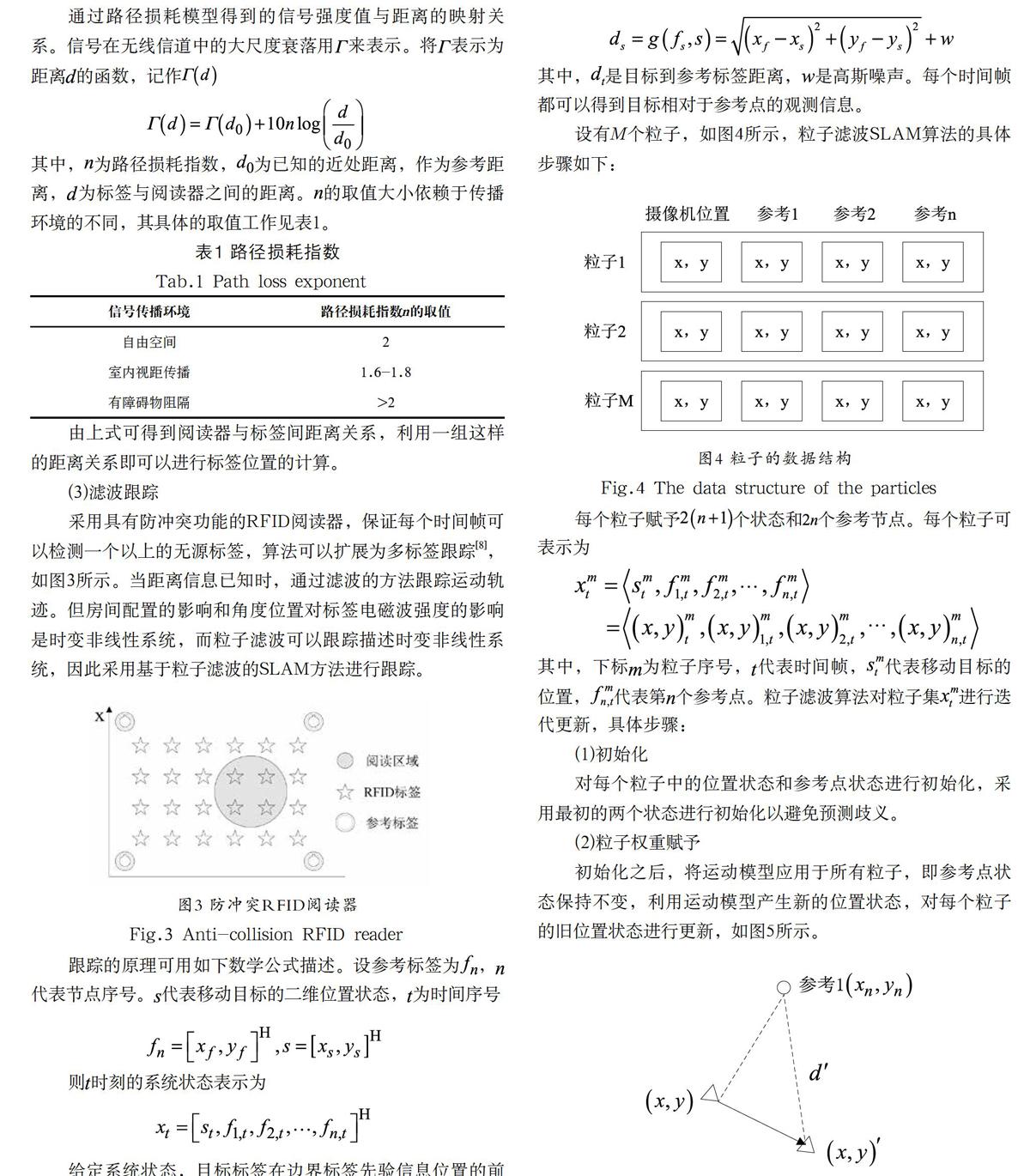
設有M個粒子,如圖4所示,粒子濾波SLAM算法的具體步驟如下:
每個粒子賦予個狀態和個參考節點。每個粒子可表示為
其中,下標為粒子序號,代表時間幀,代表移動目標的位置,代表第個參考點。粒子濾波算法對粒子集進行迭代更新,具體步驟:
(1)初始化
對每個粒子中的位置狀態和參考點狀態進行初始化,采用最初的兩個狀態進行初始化以避免預測歧義。
(2)粒子權重賦予
初始化之后,將運動模型應用于所有粒子,即參考點狀態保持不變,利用運動模型產生新的位置狀態,對每個粒子的舊位置狀態進行更新,如圖5所示。
其中,為舊狀態,為運動模型產生的更新狀態為保持不變的參考點狀態。是預測的觀測值。則粒子的更新表達式為
(3)規劃調整
為了選取到最佳參考標簽,在應用完運動模型和權重賦予之后,對每個粒子調整參考標簽的位置狀態以使得預測的觀測值和真實的觀測值之間的誤差最小化。
首先獲得參考點的距離度量,在一個等距圓弧上進行下一個估計,之后應用運動模型由狀態產生狀態(即圖中黑色三角)。假設黑點位置是正確的參考點A的位置,產生一個新的觀測。通過比較真實的觀測和預測觀測,顯然更小因此參考點A被移動到虛線點。這樣調整之后,參考點會更接近真實位置。具體移動的遠近取決于誤差大小和半徑,具體采用下式來確定
其中,參數 根據實際情況選取。
(4)重采樣
首先進行歸一化,在所有的權重和保持不變的前提下,將大權值的粒子復制,刪除小權值粒子。算法流程描述如圖6所示。
采用一架網絡攝像頭進行視頻輔助,在可見區域攝像頭通過視頻圖像輔助進行目標精確定位。采用背景提取技術來分析前景和背景,然后對跟蹤目標進行定位,并給出其在絕對坐標系中的坐標。最后將目標與RFID標簽坐標位置相比較,得到正確的目標位置和ID。具體步驟:
(1)前景背景分析
背景提取用來區分目標和背景的差異。首先建立無人進入時背景。當目標進入場景時,將每幀圖像和背景比較,識別跟蹤目標。
(2)目標檢測
由于存在噪聲,背景提取算法無法得到完整圖像。可采用Erosion Dilation算法進行圖像增強,檢測目標。
(3)坐標變換
由于攝像機與地面的角度以及近大遠小會引起平面畸變,影響絕對坐標的計算。需要進行坐標校正,采用坐標變換算法進行坐標校正,如圖7所示。
and video assisted tracking)
RFID跟蹤和視頻跟蹤的融合流程如圖8所示。首先,根據環境設定RFID參考標簽的初始配置并安放參考點,分析信號強度,挑選強度可靠區域。開始檢測,獲取信號強度,計算距離,并采用SLAM進行RFID跟蹤。根據地理位置先驗信息,判斷信號和區域匹配的合理性,如果目標出現在不可能位置則重新檢測。
然后,通過實時得到的景圖,在視頻跟蹤區域采用背景提取技術分離前景和背景。判斷和檢測目標得到目標范圍,計算精確坐標,返回坐標值到處理終端和RFID坐標進行比對,綜合得出更精確的目標位置并得到目標ID信息。
5 結論(Conclusion)
基于視頻輔助的無源RFID室內跟蹤技術的跟蹤范圍最小,通過提取目標標簽和參考標簽間的距離信息,并利用多組該數據結合參考標簽和閱讀器的先驗位置信息,通過設立準則進行濾波從而給出移動目標的二維跟蹤軌跡,可靠性高且成本低,在室內定位跟蹤系統中得到了廣泛研究,是現在室內定位的趨勢性技術。
參考文獻(References)
[1] C Benavente-Peces,et al.Global System for Location and Guidance of Disabled People: indoor and outdoor technologies integration.Networking and Services,2013.ICNS'09.Fifth International Conference on.Valencia:IEEE,2013:370-375.
[2] Y Huang,S Lv,J Wang,J Shi.The Topology Analysis of Reference Tags of RFID Indoor Location System.Digital Ecosystems and Technologies,2014.DEST'09.3rd IEEE International Conference on.Istanbul:IEEE,2014:313-317.
[3] Ching-Sheng Wang,Xin-Mao Huang,Ming-Yu Hung.Adaptive RFID Positioning System Using Signal Level Matrix.World Academy of Science Engineering & Technology,2015(70):747.
[4] S.P.Subramanian,et al.RIL-Reliable RFID based indoor localization for pedestrians.Software,Telecommunications and Computer Networks,2012.SoftCOM 2008.16th International Conference on.Split:IEEE,2012:218-222.
[5] H.Tatsumi,et al.RFID localization for the visually impaired.Automation Congress,2014.WAC 2008.World.Hawaii,HI:IEEE,2014:1-6.
[6] B.S.Choi,J.W.Lee,J.J.Lee.Localization and map-building of mobile robot based on RFID sensor fusion system.Industrial Informatics,2014 INDIN 2008.6th IEEE International Conference on.Daejeon:IEEE,2014:412-417.
[7] B.S.Choi,J.W.Lee,J.J.Lee.An improved localization system with RFID technology for a mobile robot.Industrial Electronics,2008.IECON 2013.34th Annual Conference of IEEE.Orlando,FL:IEEE,2013:3409-3413.
[8] R.Tesoriero,et al.Tracking autonomous entities using RFID technology.Consumer Electronics,IEEE Transactions on,2012,55(2):650-655.
