航行體出水俯仰雙態特征研究
2016-05-06 09:09:48王占瑩馮健華程少華魏海鵬尤天慶
兵器裝備工程學報 2016年3期
王占瑩,馮健華,程少華,魏海鵬,尤天慶
(北京宇航系統工程研究所,北京 100076)
?
航行體出水俯仰雙態特征研究
王占瑩,馮健華,程少華,魏海鵬,尤天慶
(北京宇航系統工程研究所,北京100076)
摘要:水下航行體垂直發射水彈道參數設計是水下發射技術研究的重要內容。在試驗研究中發現,水下垂直發射時出水過程水彈道會出現俯仰雙態特征,為了分析出水姿態變化規律,基于水下垂直發射水彈道理論模型并結合試驗結果,對造成出水俯仰雙態特征的機理進行了分析,獲得了造成出水俯仰雙態的原因及影響規律,為水彈道規律研究和參數設計奠定了基礎。
關鍵詞:水彈道;水下垂直發射;俯仰雙態本文引用格式:王占瑩,馮健華,程少華,等.航行體出水俯仰雙態特征研究[J].兵器裝備工程學報,2016(3):163-166.
Citation format:WANG Zhan-ying, FENG Jian-hua, CHENG Shao-hua, et al.Study on Binary-State Pitching Movement of Water-Exit Trajectory of Underwater Vehicles[J].Journal of Ordnance Equipment Engineering,2016(3):163-166.
對于水下發射航行體,出水姿態參數是水彈道設計的重要指標[1-3],而水下發射過程中,在流體動力、浮力等復雜外力作用下,水彈道變化規律異常復雜,尤其在出水過程中,航行體的出水彈道參數變化是一個短暫、變化激烈而又復雜的過程。航行體的出水姿態與軸向運動參數密切相關,俯仰運動與軸向、法向運動參數強烈耦合,甚至初始發射速度會對出水姿態造成直接影響。
在試驗研究發現,水下無控垂直發射時航行體在出水過程會出現俯仰雙態特征,這對出水姿態參數設計影響很大。為了深入分析水下垂直發射航行體出水姿態變化特性,本研究基于水下垂直發射水彈道理論模型并結合試驗結果,對造成出水俯仰雙態特征的機理進行了分析,為水下垂直發射水彈道研究和參數設計奠定了基礎。
1水下彈道模型建立
1.1航行體垂直發射水彈道模型
航行體水下發射過程中,在初始艇速影響下,航行體主要受到重力、浮力、流體動力等外力作用[4-10],在綜合外力作用下,航行體位移和姿態參數不斷變化,其運動學方程滿足
(1)
式中
其中:m為航行體質量;Jx、Jy和Jz為航行體體軸系3個方向轉動慣量;xc、yc和zc為航行體體軸系3個方向的質心坐標;X=[vx1vy1vz1wx1wy1wz1];RA為所受的定常流體力和部分非定常流體力;ΔG為重力和浮力作用項;WA為運動交叉項。
水下發射航行體通常為軸對稱體,因此以上的數學模型可以簡化為俯仰平面內的運動模型,其理論運動方程展開為
(2)
其中:Ry1為法向定常流體動力(包括定常法向力和定常法向附加力);λii為附加質量項;B為浮力;G為重力;Xb為浮心距離質心間距;Lz1為定常流體力矩(包含俯仰力矩和俯仰阻尼力矩)。
1.2模型驗證
為了驗證本研究所提出的數學模型和數值計算方法,開展了航行體水下垂直發射水下彈道研究試驗,并通過上述水彈道數學模型的建立,進行仿真計算,將通過理論模型得到的俯仰角速度仿真結果與試驗結果進行了比對分析,結果見圖1所示,理論模型計算獲得的俯仰角速度與試驗結果十分相近,由此驗證了本文水彈道出水俯仰雙態特征研究問題理論模型中外力因素和數值計算方法的準確性。
圖1 某航行體垂直發射俯仰角速度時間歷程曲線
2出水俯仰雙態特征研究
2.1出水俯仰雙態現象及仿真驗證
研究發現,水下垂直發射過程中航行體出水過程俯仰角速度出現分叉變化特性,本文稱其為俯仰雙態特征,如圖2中試驗測得俯仰角速度時間歷程,航行體出水過程俯仰角速度分別呈現上升和下降兩種截然不同的變化趨勢。此俯仰雙態現象的出現是水彈道參數重要變化規律,為了分析出水俯仰雙態特征的變化規律和影響因素,通過水彈道理論模型的建立和仿真計算,分析研究了造成出水過程俯仰角速度不同變化趨勢。
圖2 航行體垂直發射出水俯仰雙態現象
為了分析水下垂直發射狀態下出水姿態變化規律差異性產生的原因,對出現不同出水俯仰姿態特性的試驗工況進行了理論計算復現,理論計算結果呈現出與試驗結果一致的出水俯仰雙態特征,具體可見圖3所示。
圖3 理論計算出水姿態俯仰雙態結果
通過對理論計算模型中產生俯仰姿態變化的外力矩因素進行分析,獲得了產生俯仰姿態出水過程差異的原因在于出筒速度量值的不同,即在無控水下發射過程中,不同的出筒速度會造成相同發射狀態下的航行體在出水過程中出現俯仰姿態的差異性,軸向彈道參數與俯仰方向姿態運動具有耦合性。出筒速度相對高時出水過程俯仰角速度會呈上升變化,出筒速度較低時,出水過程俯仰角速度會發生下降現象。造成此現象的直接原因具體分析為以下幾個方面:
1) 從式(2)可以看出,水下發射時出水過程俯仰角速度的主要影響因素為定常流體俯仰力矩和浮力矩。定常流體俯仰力矩中包含俯仰力矩和俯仰阻尼力矩,俯仰力矩與攻角和動壓頭有關,在出水過程由于壓心后移俯仰力矩為正;俯仰阻尼力矩與動壓頭和俯仰角速度有關,同樣為正。因此定常流體俯仰力矩在出水過程中是正向的;
2) 由于航行體在初始法向運動速度作用下俯仰姿態呈向負向發展特征,因此出水時俯仰姿態角偏差為負,而浮力矩作用點在出水過程逐漸向航行體尾部推進,基本為負向,因此俯仰角速度變化趨勢由定常流體俯仰力矩和浮力矩兩項符號相反的力矩量值決定;
3) 出筒速度低時,在航行體出水時速度也會相對較低,因此動壓頭量值較小,造成了定常流體力和定常流體力矩量值都較小,可見圖4和圖5中不同出筒速度下各項定常流體法向力對比以及圖6和圖7中不同出筒速度下各項定常流體力矩對比;
4) 出水過程中式(2)右側項-mωz 1Vx1為正,而浮力項在出水過程中為負,出筒速度越小,-mωz 1Vx1項越小,抵消不住浮力的作用,因而法向速度減小導致攻角減小,進而定常流體力矩減小,浮力矩產生的作用更加起到主導作用,因而綜合作用下俯仰角速度會在出筒速度低時發生下降現象;
5) 相反,當出筒速度較大時,出水過程中影響彈體法向速度增加的-mωz 1Vx1項量值較大,能夠抵消浮力項在出水過程中起減小法向速度的作用,因而造成法向速度增大,攻角增大,定常流體力矩產生作用增大,因而俯仰角速度發生上升現象。
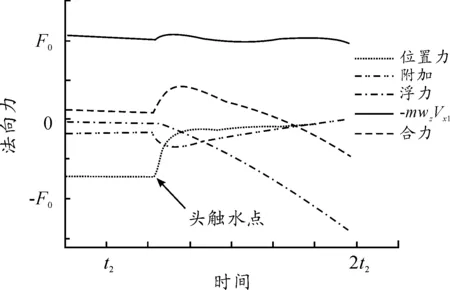
圖4 出筒速度較低時各項法向力影響因素
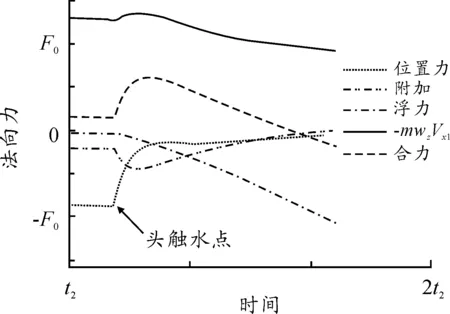
圖5 出筒速度較高時各項法向力影響因素
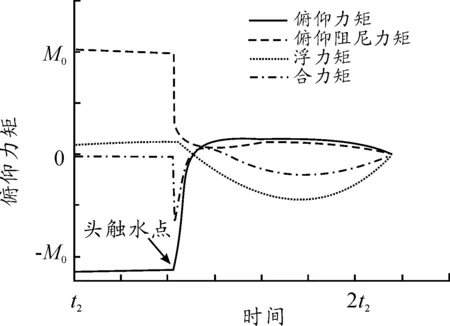
圖6 出筒速度較低時各項俯仰力矩影響因素

圖7 出筒速度較高時各項俯仰力矩影響因素
2.2出水俯仰雙態特征機理分析
為了進一步分析出水過程俯仰姿態的影響機理,進行了出筒速度更廣范圍量值下的水彈道仿真分析,從圖8不同出筒速度下出水過程俯仰角速度仿真結果的變化趨勢中可以發現,出筒速度越小,出水過程俯仰角速度下降現象越明顯,相反,出筒速度高到一定量值時出水過程俯仰角速度會上升,并且在出筒速度增加時,俯仰角速度上升的也更加明顯。
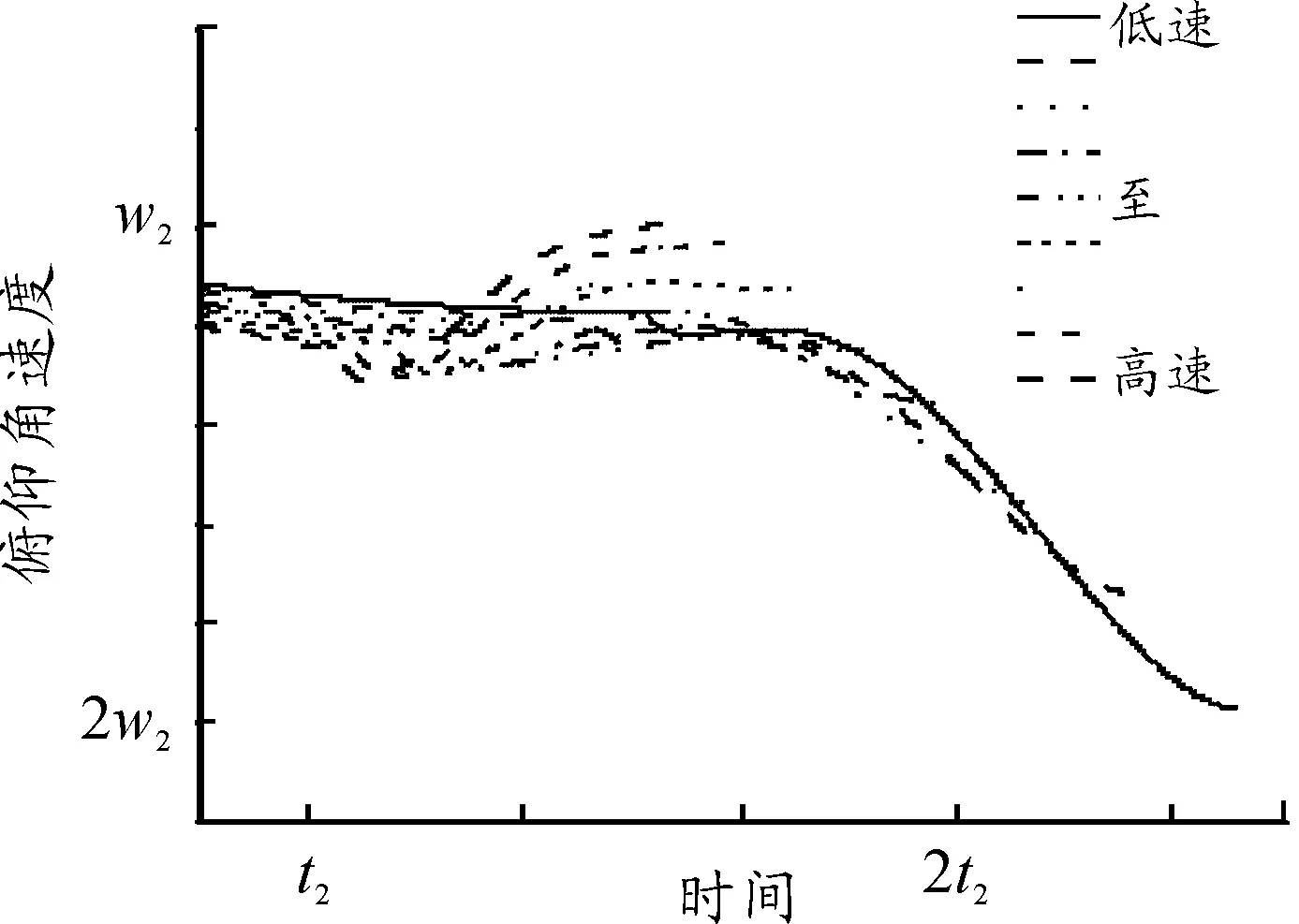
圖8 出筒速度對出水過程俯仰角速度影響
這說明出水俯仰雙態的發生存在一個出筒速度的臨界值,在臨界出筒速度發射時出水過程俯仰角速度基本保持不變,而這個出水速度臨界值取決于出水過程定常流體力矩與浮力矩的平衡點,即
(3)
暫不考慮流體力矩Lz1中的阻尼力矩項后,將式(3)各項展開后為
(4)

將式(4)中兩項相除,則有
(5)
從式(5)可以看出,流體力矩和浮力矩的相對量值影響因素主要為:
b) 航行體的流體動力布局,這決定了浮心位置和流體動力特性參數;
3結論
本文通過水下垂直發射彈道理論計算模型的建立,進行了出水彈道參數仿真分析,并結合理論分析獲得了水下垂直發射水彈道出水姿態參數變化規律以及影響出水姿態變化的主要因素和機理:
1) 水彈道理論數學模型可以從量值和變化規律上模擬水下發射過程航行體的水彈道參數,為出水姿態變化規律提供理論分析方法和支撐;
2) 對于水下垂直發射,出筒速度的差異會導致出水俯仰角速度產生分叉特性,而分叉點取決于出水過程定常流體力矩與浮力矩的平衡點,具體影響因素包括航行體相對水的密度比和流體動力特性參數(流體結構布局);
3) 在決定出水俯仰雙態特征出現的出筒速度平衡點以下,出筒速度越低,出水角速度下降越明顯,反之,出筒速度越高,俯仰角速度會上升越明顯。
參考文獻:
[1]袁緒龍,張宇文.運載器垂直出水彈道姿態角奇異性問題研究[J].彈箭與制導學報,2005(2):83-87.
[2]袁緒龍,張宇文,殷崇一,等.無動力潛射導彈運載器出水彈道建模與實驗驗證[J].彈箭與制導學報,2003(S5):187-189.
[3]鄭邦濤.潛射導彈出水過程水彈道及流體動力研究進展[J].導彈與航天運載技術,2010(5):8-12.
[4]黃壽康.流體動力彈道載荷環境[M].北京:宇航出版社,1991.
[5]馬震宇,劉曜.無動力運載器水彈道特性計算[J].四川兵工學報,2011(6):4-7.
[6]劉曜,馬震宇.潛載導彈垂直發射水彈道和分離彈道研究[J].船舶工程,2005(3):6-9.
[7]方寧,宋召青.潛載垂直發射導彈水下彈道建模與仿真[J].海軍航空工程學院學報,2010(3):311-314.
[8]韓鋒,張宇文,栗夫園.無動力運載器水下彈道的建模與仿真[J].計算機仿真,2014(3):51-54.
[9]宋海龍.水彈道建模與仿真方法研究[D].哈爾濱:哈爾濱工業大學,2014.
[10]仲維國,張嘉鐘.潛射航行體的水下彈道模擬[J].彈道學報,2005(1):8-12.
[11]陳柯勛,吳瑞斌,韋冰峰,等. 分布式測量技術在航行體水下試驗中的應用[J].強度與環境,2014,41(5):45-50.
(責任編輯唐定國)
Study on Binary-State Pitching Movement of Water-Exit Trajectory of Underwater Vehicles
WANG Zhan-ying, FENG Jian-hua, CHENG Shao-hua,WEI Hai-peng, YOU Tian-qing
(Beijing Institute of Astronautical System Engineering, Beijing 100076, China)
Abstract:The design of water trajectory parameters is an important part of underwater vertical launch technology. Water-exit trajectory will appear binary-state pitching movement when being launched vertically in experimental study. In order to analyze the changing rules of water posture, the mechanism analysis of binary-state pitching movement can be clarified based on water trajectory model and experimental results and the influencing laws and causes to binary-state pitching movement were obtained. The method and results have a certain reference value for engineering studies of water trajectory parameter design.
Key words:water-exit trajectory; vertical launch underwater; binary-state pitching movement
文章編號:1006-0707(2016)03-0163-04
中圖分類號:V19;TJ7
文獻標識碼:A
doi:10.11809/scbgxb2016.03.039
作者簡介:王占瑩(1983—),女,碩士研究生,工程師,主要從事水彈道建模與計算研究。
收稿日期:2015-09-12;修回日期:2015-09-25
【基礎理論與應用研究】