無人直升機自動起降段高度控制技術研究
2016-05-06 09:18:46黃一敏孫春貞
兵器裝備工程學報 2016年3期
夏 斌,黃一敏,孫春貞
(南京航空航天大學,南京 211100)
?
無人直升機自動起降段高度控制技術研究
夏斌,黃一敏,孫春貞
(南京航空航天大學,南京211100)
摘要:無人直升機自動起降是飛行控制過程中的重難點,針對某型無人直升機自動起降階段出現的特殊問題,考慮質量不確定性以及地效因素的基礎上,設計出基于高度的高度控制和基于升降速率的高度控制兩種控制方案,通過Matlab仿真和綜合仿真對比,說明基于升降速率的高度控制方案能夠較好地解決不確定性問題,滿足了不同環境下飛行控制性能要求,并提高了控制精度,更適合樣例無人直升機起降段的高度控制。
關鍵詞:無人直升機;自動起降;質量不確定性;控制精度
Citation format:XIA Bin, HUANG Yi-min, SUN Chun-zhen.Research of Automatic Takeoff/Landing Height Control Technology for Unmanned Helicopter [J].Journal of Ordnance Equipment Engineering,2016(3):90-93.
無人直升機(Unmanned Helicopter,UMH)是無人機大家族中的一員,在功能上能夠實現垂直起降,在外部構型上屬于旋翼飛行器。無人直升機主要由旋翼提供升力,同時旋翼也是無人直升機的操縱面,通過無人直升機的變距操縱使得旋翼產生飛行所需要的控制力,實現懸停、爬升/下滑、前后飛、側飛等。因此,無人直升機除了具備固定翼無人機的一般優點外,還具有垂直起飛著陸、空中定點懸停、低速飛行、低空超低空飛行、懸停回轉等特點[1]。因此,在起飛著陸場地受限、飛行空間狹小、要求執行低空低速任務的場合下,無人直升機有著廣闊的應用前景[2]。雖然無人直升機在飛行速度上與固定翼無人機無法相媲美,但是由于其具有獨特的飛行能力,使得無人直升機在無人機家族中發揮著不可替代的作用。
在自動起飛與自動著陸研究和應用方面,各國的科研單位進行了廣泛的探索,國際上先進的無人直升機基本上都可以實現自動起飛與自動著陸,其中火力偵察兵和S-100型無人直升機不僅具備了普通的陸基起降能力,且實現了在海面風影響下跟蹤移動艦船并實現無人干涉下的自主艦面起降,已經達到工程實用和軍事裝備的要求[4]。但是,國內無人直升機技術與國外仍存在一定的差距,特別在自動起飛與自動著陸控制方面,雖然有技術上的突破,但國內的型號均未實現真正意義上的自主起降,基本以人工操作或是帶增穩的人工操縱為主,與工程應用和軍事裝備需求仍有較大差距。本文針對某型號無人直升機分析自動起飛段的特殊性,提出高度通道控制策略并進行仿真驗證。綜合上面分析可以看出,總結各通道對高度控制的要求如下:響應平緩,阻尼比ζ≥1.0;控制誤差小于±0.3 m;具有較強的適應性。
1控制需求分析
高度通道的控制輸出直接影響總距的變化,同時引起系統其他通道的耦合影響,牽一發而動全身。下面從高度通道本身特性、發動機通道、航向通道和整個系統四個方面分析高度通道的控制需求。
從高度通道本身特性看,首先,無人直升機的高度通道對響應的快速性沒有較高的要求,但是高度通道的阻尼比需要大于或等于1,保證高度響應的平穩性;其次高度通道需要具有較強的適應能力,能夠適應在不同質量、海拔高度下均能滿足控制要求。最后,在自動起飛與自動著陸段高度控制的控制精度要求較高。
從對發動機通道的耦合看,總距通道對發動機通道具有較強的耦合性,如果總距發生較大波動則將嚴重影響發動機轉速恒定控制性能并容易導致危險發生,從發動機控制的安全角度考慮要求總距變化緩慢,不允許出現較大波動[7]。
從對航向通道的耦合看,由于樣例無人直升機屬于常規單旋翼加尾槳布局,而總距的變化導致旋翼反扭矩變化,對航向通道引起強烈耦合作用,影響航向控制性能。航向控制又是其它控制的基礎,因此從航向通道考慮要求總距變化緩慢,使航向控制具有足夠的調整時間。
從整個系統角度看,旋翼系統是整個直升機系統的動力源泉,總距的微小波動都會給系統帶來顯著影響,因此要求總距響應過程緩慢平穩變化[5]。尤其在外界擾動的情況下,對高度控制提出更嚴格的要求。
2高度通道控制律設計
該節主要介紹了兩種高度控制方案:基于高度的常規高度控制方案和基于升降速率的改進高度控制方案,通過Matlab線性分析并設計其控制律參數,并在非線性仿真環境下進行對比驗證,選擇控制效能更好的方案應用到起降控制中。
2.1常規高度控制方法
常規高度控制主要反饋高度信息和升降速率信息,對高度的偏差進行經典PID控制,升降速率的引入主要是為了增加高度通道的阻尼比,積分項主要提高控制的穩態精度,但積分項在動態過程中是斷開的,只有在穩態情形下才接通。常規高度控制律如式(1)所示:
(1)
升降速率的指令值根據高度偏差范圍給出固定的數值大小,從樣例無人直升機的試飛數據來看,在起降階段近地面遭遇復雜的風擾動,容易發生高度‘飄’,會導致總距的波動而出現不連續現象,而且該方案對起飛時飛機質量的不確定性適應能力弱,針對不同的起飛質量需要重新修改配平值才能夠實現,實用性不強。
2.2改進高度控制方法
改進高度控制主要由內外回路組成,內回路主要是升降速率的PI控制,外回路由高度偏差給出升降速度指令,改進高度控制律如式(2)所示:
(2)
針對改進控制律內回路不使用加速度信號作阻尼有如下原因:
1) 樣例直升機垂向運動阻尼導數:
(3)

通過分析可以計算出樣例無人直升機在懸停和30 m/s前飛狀態下的垂直運動阻尼導數分別為-37.3 kg·s/m和-28.7 kg·s/m,可以得出樣例無人直升機具有較大的垂向運動阻尼。
其物理解釋:若直升機向下運動導致剖面迎角增大,拉力T增大,阻滯向下運動;反之,若直升機向上運動導致剖面迎角減小,拉力T減小,阻滯向上運動[3]。
2) 針對有無加速度信號的前提下,升降速率的控制在線性條件下作了簡單分析,如圖1、圖2所示。
結合上述階躍響應曲線,系統的響應時間、穩態時間和超調量分析可知,加速度信號并不能很好地改善升降速率的動態性能,只采用升降速率的PI控制就可以滿足起降高度控制的需求,而常規方案在高度的控制上則出現了5%的超調,從而造成總距的波動,對發動機通道和航向通道造成不同程度的耦合影響。

圖1 升降速率階躍響應曲線
圖2 高度的階躍響應曲線
3) 在真實的試飛試驗環境下,加速度信號的信號質量并不理想。
3仿真驗證與分析
針對常規方案和改進方案作如下仿真:以自動起飛階段為例,分析高度通道的跟蹤響應,其他通道均處于保持狀態(如縱橫向位置保持、航向保持)在風擾動和質量不確定性兩種仿真案例下對上述兩種方案進行魯棒性分析。
3.1風擾動下仿真分析
1) 在垂向加入±1 m/s范圍內變化的風,分析其高度響應情況(圖3、圖4)。
2) 水平面加入5 m/s大小,風向10 deg/s變化的動態風,分析高度響應曲線如圖5、圖6所示。
圖3 垂向風擾動下的升降速率響應曲線

圖4 垂向風擾動下的高度響應曲線
圖5 水平風擾動下的升降速率響應曲線
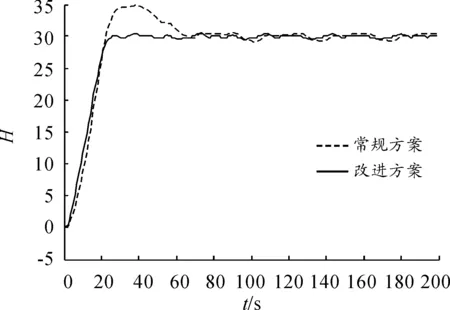
圖6 水平風擾動下的高度響應曲線
風擾動下仿真分析:在垂向風擾動和水平動態風擾動下,由圖3和圖6可以看出常規方案對垂向風擾動更為敏感,常規方案控制下高度和升降速率均出現一定程度的波動,這對起降階段地效區內的飛行造成嚴重的影響,而改進高度方案的控制效果得到明顯的改善;由圖4和圖6可以看出在常規高度方案的控制下,自動起飛結束后的懸停狀態下高度出現較嚴重的超調,上下波動嚴重,且穩態時高度控制精度不能滿足自動起降的要求,改進高度控制方案在控制效能和控制精度上大大提高,滿足控制要求,使得無人直升機快速平穩地脫離地效區;除此之外,由于起降時高度通道為主控通道,控制律的輸出直接給到總距上,而高度的波動會引起總距的變化,影響發動機通道的恒轉速控制,以及總距變化帶來旋翼反扭矩的變化對航向的耦合控制,改進方案在風擾動下很好地擬制了高度的波動,從一定程度上減小了通道間的耦合影響。
3.2質量不確定性仿真分析

樣例無人直升機的質量為200 kg,現以自動起飛仿真情形下加入±10%的質量不確定性,對比常規和改進方案的控制效果如下圖7~圖12曲線所示。
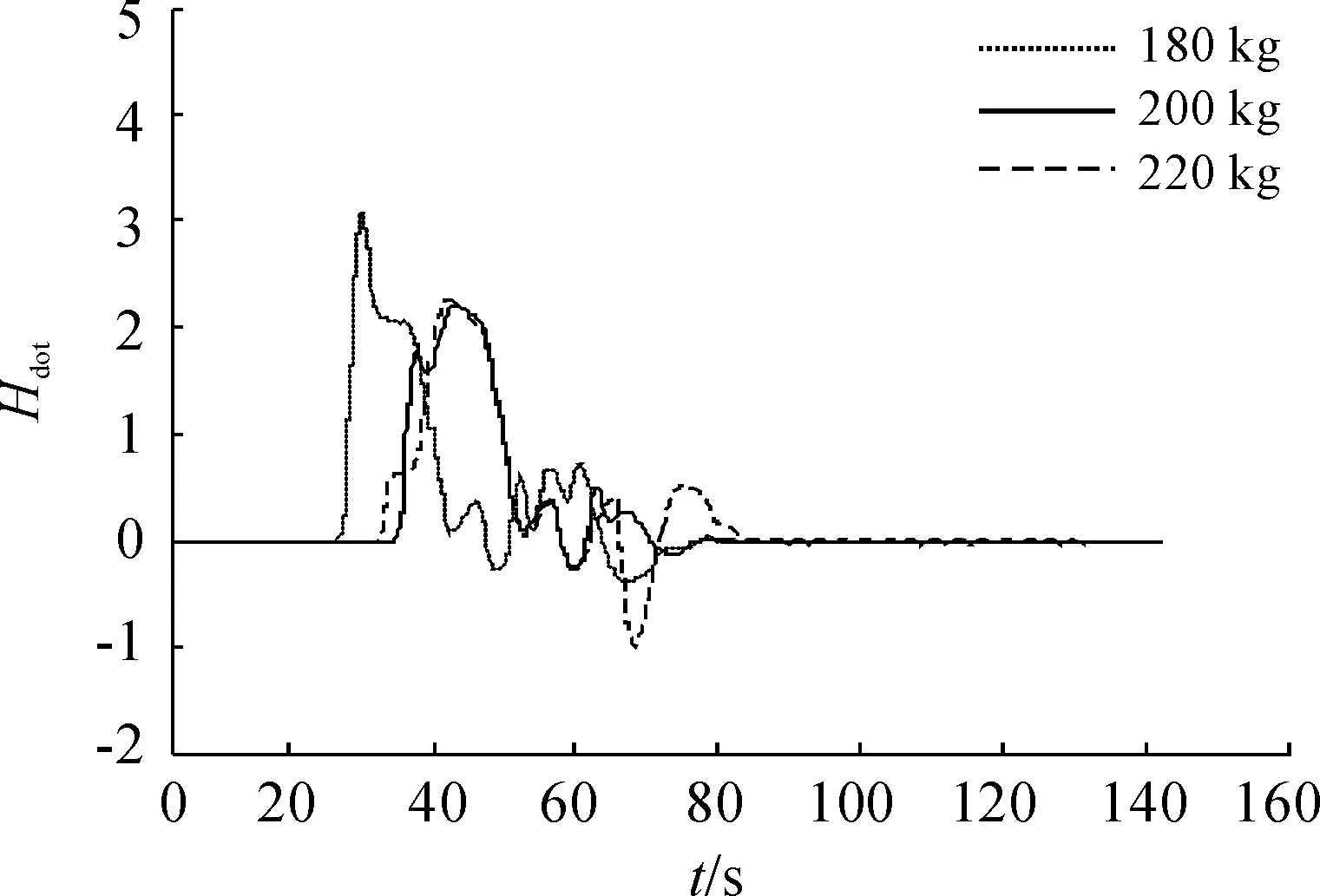
圖7 常規方案的升降速率曲線
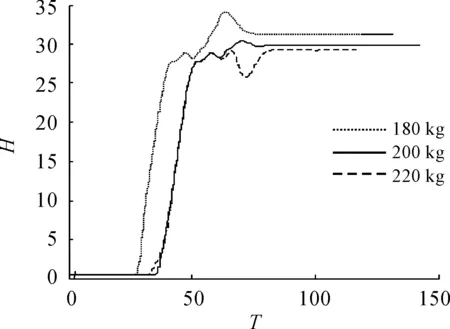
圖8 常規方案的高度響應曲線
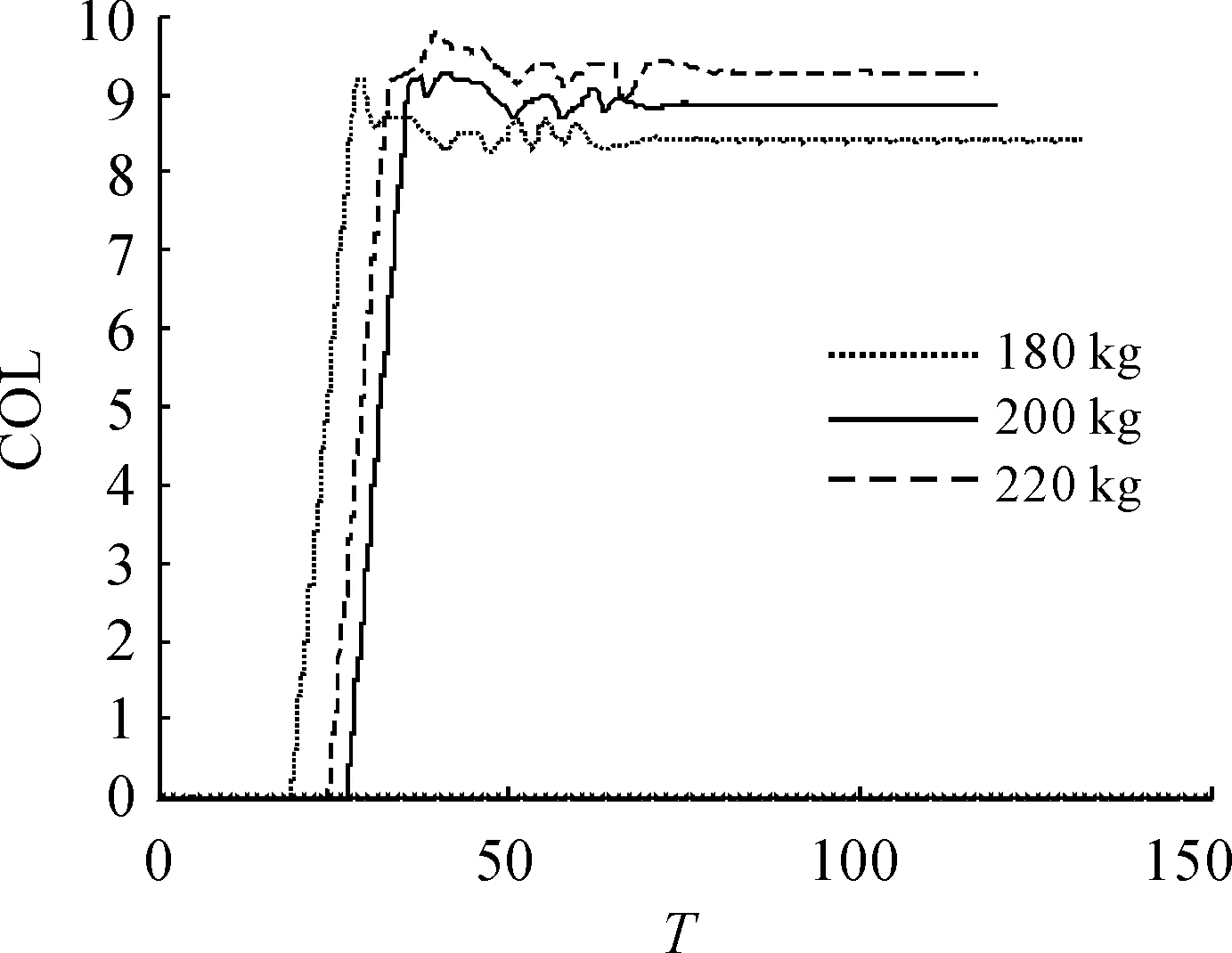
圖9 常規方案下總距響應曲線
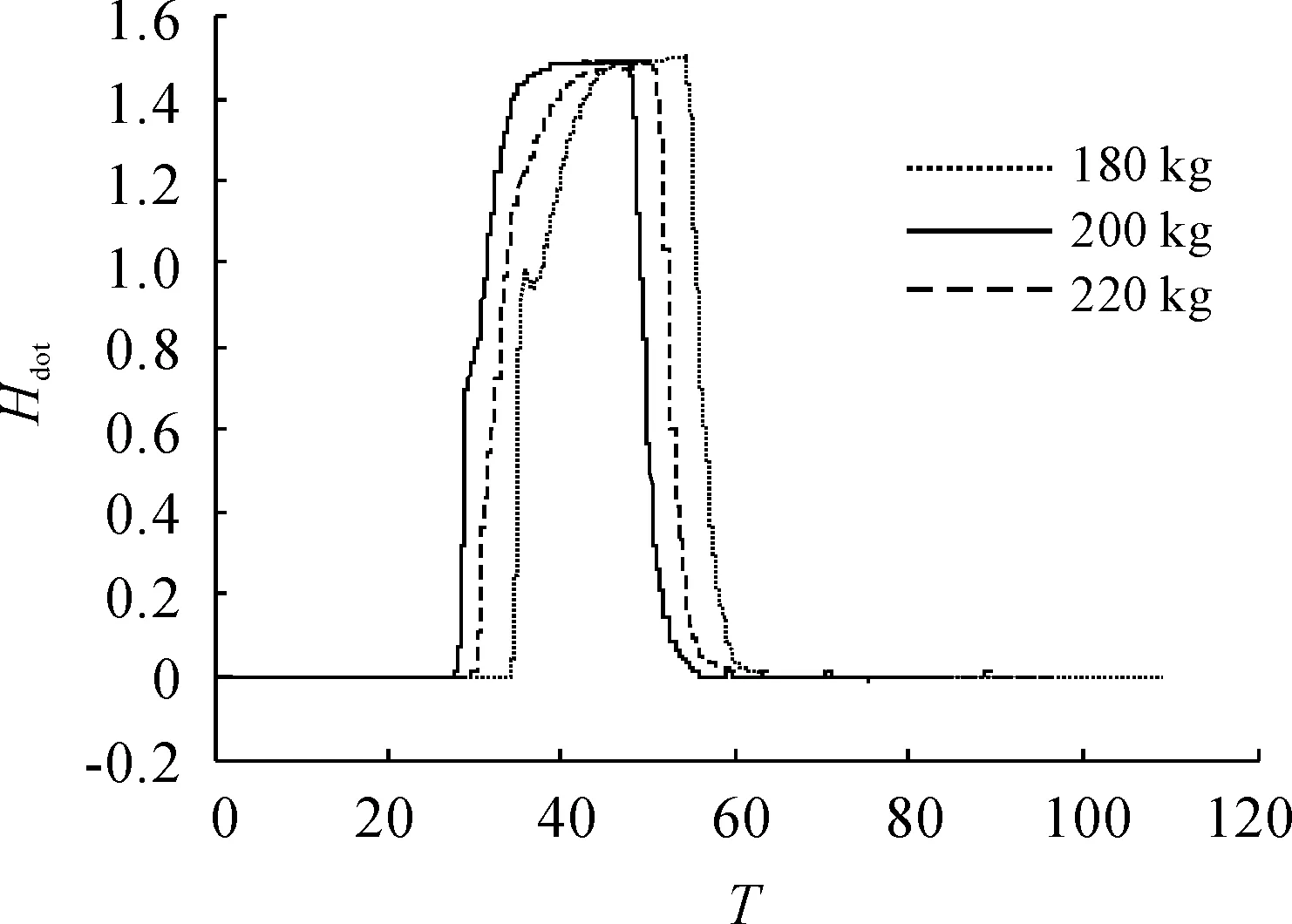
圖10 改進方案下升降速率響應曲線
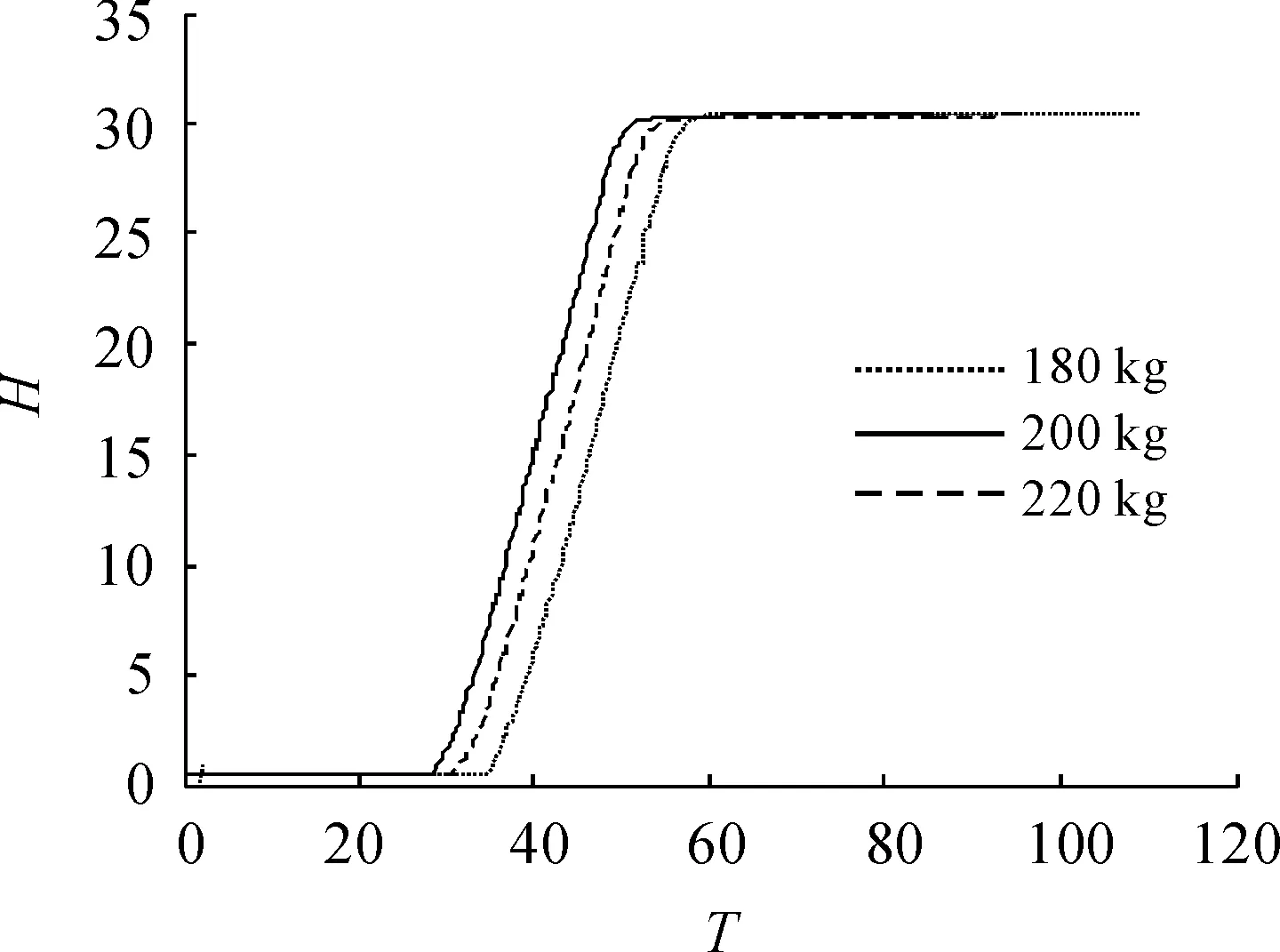
圖11 改進方案下高度響應曲線
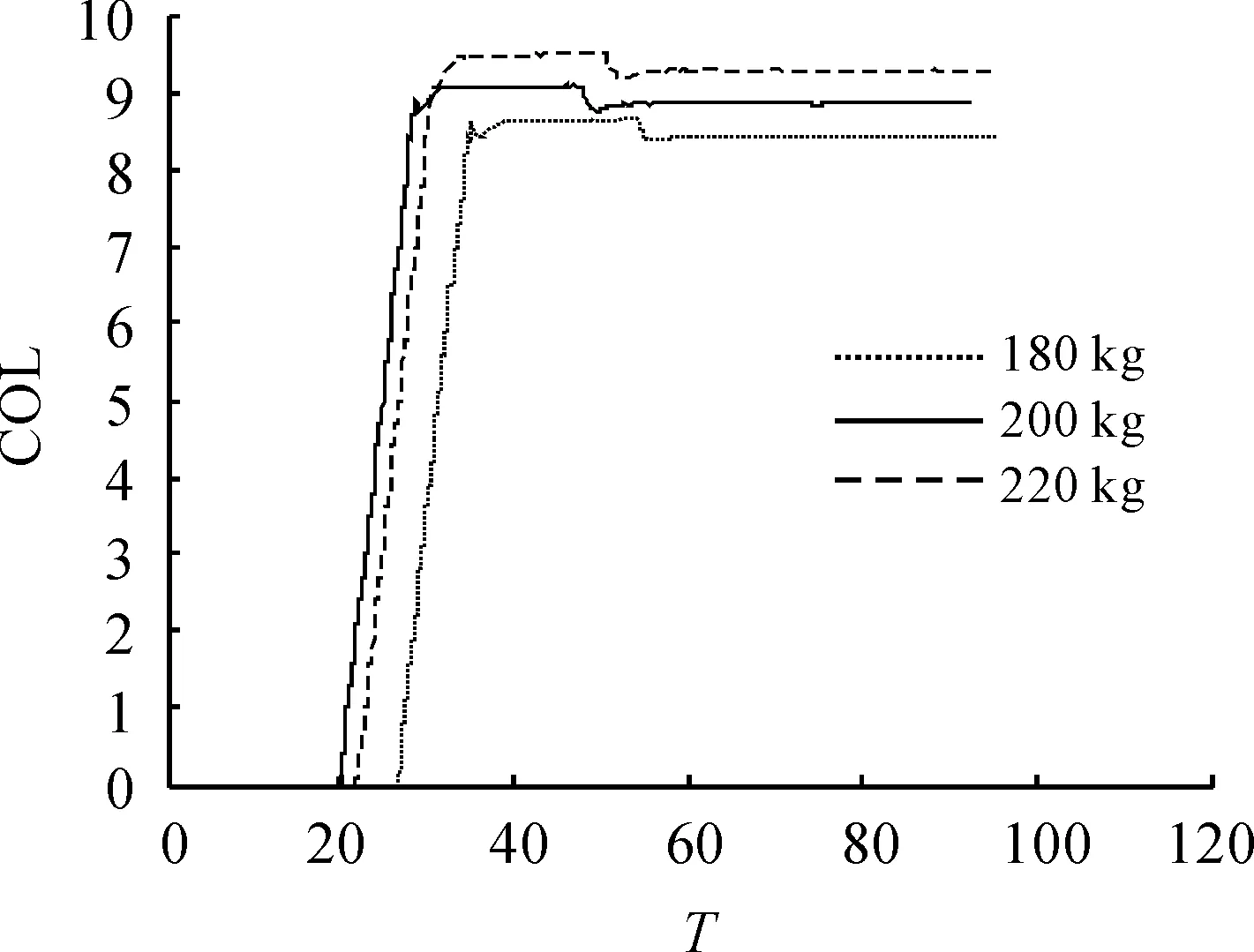
圖12 改進方案下總距響應曲線
質量不確定性下仿真分析:由上述圖7~圖12曲線可以看出,改進方案對飛機起飛時的質量不確定性適應性更強,在整個爬升過程中升降速率的控制比常規控制方案下的控制效果更加平穩,降速率和高度的響應均無超調現象出現,不會因為質量的增加而造成在地效區內長期浮地的現象,也不會因為質量的減小而造成地效區內外的升降速率時快時慢的情形出現[8];并且總距的響應也比較平緩,不會出現嚴重的波動情況,減輕了發動機通道的耦合影響。通過控制升降速率間接控制高度的方案能夠使得在起降過程中有穩定的爬升速度,保證高度響應的平穩性和高度通道的適應性。
4結束語
本文分析了自動起降的控制需求以及難點所在,重點分析了高度通道對風擾動和飛機質量不確定性的適應能力的重要性;隨后提出了基于常規高度控制方案和基于升降速率的控制方案,對其進行了理論分析,并在等效仿真環境下進行驗證,得出基于升降速率的高度控制方案對風擾動和飛機質量的確定性適應能力更強,能夠減小高度通道與發動機通道以及航向通道的耦合影響,保證自動起降階段的高度控制具有較強的魯棒性。
參考文獻:
[1]普勞蒂 K.W.直升機性能及穩定性和操縱性[M].北京:航空工業出版社,1990:410-472.
[2]尹亮亮.無人直升機飛行控制若干關鍵技術研究[D].南京:南京航空航天大學,2012.
[3]高正,陳仁良.直升機飛行動力學[M].北京:科學出版社,2003:114-115.
[4]徐凱銘.無人直升機懸停狀態位置以航向控制技術研究[D].南京:南京航空航天大學,2015.
[5]薛鵬.無人直升機自動起飛與自動著陸控制技術研究[D].南京:南京航空航天大學,2012.
[6]BRIAN L S,FRANK.L.Lewis.Aircraft control and simulation[M].New York:John Wiley,NC,1993:65-70[7]楊一棟.直升機飛行控制[M].2版.北京:國防工業出版社,2011:73-75.
(責任編輯楊繼森)
Research of Automatic Takeoff/Landing Height Control Technology for Unmanned Helicopter
XIA Bin, HUANG Yi-min, SUN Chun-zhen
(Nanjing University of Aeronautics and Astronautics, Nanjing 211100, China)
Abstract:The automatic takeoff/landing of unmanned helicopter is the key and difficult point in the entire process of flight control, this paper focused on special problems of a certain type of unmanned helicopter automatic takeoff and landing phase. Considering the quality uncertainty and the ground effect factors, two kinds of control laws designing the height control and the lifting speed control were presented. Finally, through the Matlab and integration simulation, the research indicates that the project of lifting speed control is effective and feasible in solving the uncertain problems because it meets the requirement of flight control under different environment and improving the control precision and is more suitable for the sample of unmanned helicopter landing height control.
Key words:unmanned helicopter; automatic takeoff/landing; quality uncertainty; control precision
文章編號:1006-0707(2016)03-0090-05
中圖分類號:V412.4
文獻標識碼:A
doi:10.11809/scbgxb2016.03.022
作者簡介:夏斌(1991—),男,碩士,主要從事無人直升機飛行控制技術研究。
基金項目:中央高校基本科研業務費專項資金資助(NS2015038);航空科學基金資助(20130752015)
收稿日期:2015-07-15;修回日期:2015-09-28
本文引用格式: 夏斌,黃一敏,孫春貞.無人直升機自動起降段高度控制技術研究[J].兵器裝備工程學報,2016(3):90-93.
【信息科學與控制工程】