智能型果園多功能管理機的設計與田間試驗
2016-05-03 07:37:23張亞劉繼展詹國祥唐善奇陳紹平馮
江蘇農業科學 2016年3期
張亞+劉繼展+詹國祥+唐善奇+陳紹平+馮上海+何增富+王芹


摘要: 針對現有果園管理機械功能單一、集成化和智能化水平較低的問題,根據果園規格和作業要求開發了一種智能型果園多功能管理機,采用履帶式無極變速底盤,裝配單圓盤式開溝器、外槽輪式施肥裝置和新型雙擺彌霧系統,以實現果園的開溝、施肥、施藥多環節高效機械作業。設計了智能監控系統,實現開溝、施肥、施藥各功能啟/停的自動化和快速一鍵切換,同時實現果園復雜工況下的開溝負荷反饋控制以及油量、藥量的準確監測預警,保證多功能管理機作業的可靠性及便捷操作性。田間試驗表明,管理機可實現50、40 cm寬深開溝,施肥與施藥速度分別可達360 m/h和7.2 km/h,同時滿足了矮化密植模式下的行間作業要求,為實現果園的多環節高效機械作業提供了新型多功能一體裝備。
關鍵詞: 果園;智能;多功能管理機;設計;田間試驗;開溝;施肥;施藥
中圖分類號: S224 文獻標志碼: A 文章編號:1002-1302(2016)03-0434-05
我國是世界最大的水果生產國,隨著農業產業結構的調整,林果種植面積不斷擴大,果園管理機械化的重要性日益顯著[1]。但是,我國目前果園管理機械化程度仍然較低,主要問題體現在:首先,我國果園以矮化密植為主,果園規模小且缺乏規范性,造成國外的先進大型機械難以應用[2-4];其次,目前國內現有的果園管理機械中多以手扶式中耕管理機械、手持式和背負式施藥機械等微小型機為主,作業效率低且操作強度大,且大多作業功能單一而利用效率極低[5]。因此,開發適應我國果園生產作業要求的高效多功能管理機械已成為現實緊迫需求。
部分現有果園機械可實現一機多用,如可以實現松土、培土、起壟、旋耕等多功能的1YG系列果園微耕機等,主要用于土地整理,無法滿足各類果園排水、埋施有機肥所需的寬深開溝要求,更不具備施藥、施肥等功能;而市場現有的TG系列、DWG系列等果園多功能管理機,通過底盤附加不同機具實現剪枝、噴藥、施肥、采摘、運輸等功能,其底盤主要起各類機具的攜帶與運輸作用,需由人工完成機具更換與操作,整機集成度低,操作復雜,勞動強度大而作業效率受到影響[6-7]。
本研究針對果園管理中寬深開溝、施肥、施藥等勞動強度大的關鍵環節,根據果園規格和作業要求進行多功能高度集成與智能化的管理機設計,從而為實現果園多環節高效機械作業提供新型多功能一體裝備。
1 設計要求
1.1 設計依據
1.1.1 果園規格 目前我國果園多采用低矮密植型種植模式,根據2013年11月江蘇省句容市象山鎮龍山果園基地的調研可知,果樹行距和株距均為3~4 m,樹高2~2.5 m,冠層較厚,兩行果樹枝葉幾乎交接,造成果園密閉。
1.1.2 作業參數 (1)開溝尺寸。管理機主要作業于成齡果園,在果樹行間行進開溝,完成溝內施肥,根據農藝要求,開溝寬度達到40~50 cm,深度達到40 cm[8]。現有果園開溝機的開溝尺寸一般為寬度20~35 cm,深度10~30 cm,無法滿足果園作業需要,一些機型較大的機械開溝尺寸能達到要求,但不能滿足其種植空間環境特殊性。(2)肥量。經過江蘇省句容市象山鎮龍山果園基地等落葉果樹(蘋果、葡萄等)果園調研可得,基肥秋季8月下旬至9月上中旬施入,以農家肥為主,混加少量的氮素化肥,同時每年追肥1~3次,分別以氮肥、磷鉀肥、鉀肥為主。綜合各個時期施肥方式,估算果園施肥量為1 500~6 000 kg/hm2。(3)藥量。調研可知,果園采用機動高壓噴霧器,一般在果樹的生長季節,正常情況下,果園的施藥液量在2 250 kg/hm2左右,全年用藥7~9次。
1.2 設計要求
1.2.1 整機結構 通常開溝機、施肥機與施藥機均由發動機在驅動車身行走的同時,通過后軸輸出為作業裝置提供動力。開溝施肥機則通過開溝器地輪來帶動排肥器實現同步開溝施肥作業。對于該果園多功能管理機,需要實現50 cm×40 cm寬深開溝的同時,完成果園開溝、施肥與施藥的多功能作業,無法通過現有裝備的簡單組合來實現,而必須在考慮整機動力與傳動方案的同時,滿足寬深開溝的大動力與多功能模塊的車身布局需要,從而有效控制車身尺寸以保證行間狹小冠層封閉空間的通過性。
1.2.2 監測控制 與單一作業機具不同,一定的自動化水平是滿足多功能作業的客觀需要。首先,果農在駕駛作業過程中,實現復雜的功能啟停和切換,操縱困難且容易產生誤操作;其次,果農難以實現對復雜果園土壤條件下寬深開溝作業的載荷波動、積累、突變和藥量、油量變化的實時發現與處理,從而導致意外停機和機器損傷,嚴重影響多功能管理機的作業可靠性與效率。因此,實現油量、藥量和開溝負荷的監控與響應,以及多功能的快速簡單切換,是提高多功能管理機性能及操作性的保證。
2 機械結構設計
2.1 作業部件設計
2.1.1 開溝器 為提高生產率,開溝裝置采用單圓盤式并實行一次成型作業。開溝裝置主要由懸掛架組合、中間齒輪箱總成、刀軸組合等組成(圖1)。
如圖1,開溝器下刀深度受到圓盤尺寸、開溝旋切刀尺寸、側邊齒輪箱尺寸和三點懸掛系統共同限制:
式中:R為單圓盤開溝器刀刃回轉半徑,cm;R1為圓盤半徑,cm;L為旋切刀軸向伸出長度,cm;h2為開溝刀盤軸心最低下刀離地高度,受側邊齒輪箱殼體寬度的限制,h2≥10 cm;h為開溝深度,據設計要求,h≥40 cm;h2′為開溝刀盤軸心最低抬升離地高度,cm;h1為刀刃的安全抬升離地高度,20 cm;R2為刀盤軸心與懸掛擺動支點距離,cm;θ為開溝刀盤抬升的擺動角度,rad,同時受液壓懸掛三點系統參數、底盤后輸出軸與開溝器輸入軸間許可傳動角度的限制。
為實現40 cm的開溝深度要求,根據式(1)分析計算,最終設計圓盤半徑R1=38 cm,并選擇國標IT245型旋耕彎刀作為開溝刀片,刀輥回轉半徑為245 cm。刀盤兩側各安裝5把刀,兩側旋切刀按旋向相反的兩錐狀螺旋線排列,間隔錯開,整個寬度方向依次切削,以保證開溝寬度和溝型要求。
2.1.2 施肥裝置 排肥器性能的好壞直接影響到排肥裝置的工作質量。綜合考慮排肥均勻性和排肥量,選擇外槽輪式排肥器(圖2-a)。施肥裝置設計的重點是參數的優化。溝內施肥時排肥器所需排肥量為[9]:
(2)
式中:[q]為溝內施肥所需排肥量,kg/min;Q為單位面積果園的施肥量,kg/m2;v為底盤的行進速度,m/s;x為果樹的行距,m,調研得到的果樹行距約為4 m;z為排肥器個數,個,z=1。
據式(2)求得溝內施肥時排肥器所需排肥量為 20~60 kg/min。
而外槽輪式排肥器的排肥量為[10]:
式中:q為排肥器的排肥量,kg/min;D為外槽輪的直徑,cm;L為槽輪的有效工作長度,cm;γ為肥料密度,常用復合肥密度范圍是0.840~1.01 g/cm3;α為槽內化肥充滿系數,取0.7;n為排肥器的轉速,r/min;f為每個凹槽的端面積,cm2;t為槽輪凹槽的節距,cm;λ為帶動層厚度,與排肥軸轉速有關,取 0.05 cm。其中凹槽端面積f和節距t由凹槽個數、深度及槽輪直徑D所決定。
由式(2)(3)知,溝內施肥量是否得到滿足,取決于外槽輪式排肥器的結構參數、排肥器轉速和底盤行進速度的共同限制。
根據設計參數:開溝施肥200 m/h、單施肥速度360 m/h和開溝寬度與肥料流動性等實際因素,由式(2)(3)進行規劃求解并取整,設計結果為:轉速n=60 r/min,槽輪有效工作長度L=30 cm,槽輪直徑D=18 cm,凹槽個數與深度分別為5個和2.5 cm。
排肥裝置由直流減速電動機驅動,結構總成如圖2-b所示。
2.1.3 施藥系統 由于多功能管理機的后軸動力與后部空間為開溝器所占用,目前果園機械施藥的主要裝備側向風送噴霧機所需的巨大動力和傳動方式、以及噴霧機與藥箱所需占據的龐大空間(功耗達數十千瓦,重量達200~800 kg)均無法適應多功能管理機的需要。因此提出并開發了雙擺彌霧式施藥裝置(圖3),以受到果農廣泛歡迎的手持式小型軸流彌霧機為基礎,由平面雙曲柄-空間擺桿機構模擬果農對噴管的搖動,以彌補其噴幅偏小的不足,來實現藥液對雙側果樹冠層的均勻噴施覆蓋。該裝置中由0.09 kW直流減速電動機帶動雙彌霧機噴管的搖動,并由軸流發動機完成彌霧噴施,而無需底盤動力的傳動輸入,其功耗、重量和藥液耗量均僅為側向風送果園噴霧機的1/5~1/20,從而有效解決了各功能模塊一體布置的空間與傳動協調問題[11]。
2.2 底盤設計
2.2.1 整機動力與傳動結構 (1)50 cm×40 cm寬深開溝的底盤與開溝器載荷遠遠大于施肥與施藥作業,同時寬深開溝的作業速度較低,由地輪驅動無法滿足均勻施肥和較大施肥量的需要,且果園生產中存在開溝后填入秸稈進而施加無機肥的間隔作業需要。因此,由主發動機驅動底盤行進與開溝作業,而施肥與施藥裝置則分別由電動機獨立驅動,從而大大簡化傳動系統復雜性,并實現各功能的獨立作業性和保證施肥量。(2)為提高在復雜果園土壤條件下的著地力并適應其載荷變化,進而為開溝載荷復雜變化的自動響應提供可控性,采用了履帶式底盤,橫置主發動機分別經HST液壓無級變速系統和變速箱傳遞給底盤的驅動輪軸、經換向器與萬向節后軸輸出至開溝器主軸,帶動底盤行走與開溝作業。
2.2.2 開溝功率估算 單圓盤開溝裝置所需驅動功率為[12]:
式中:P1為開溝機所需驅動功率,kW;KN為綜合比阻,KN=KgK1K2K3K4,Kg為土壤堅實度,K1為耕深修正系數,K2為土壤含水率修正系數,K3為植被修正系數,K4為作業方式修正系數,據試驗實測數據及農業機械設計手冊[13],Kg=25.5~35.7 N/cm2,K1=1.0,K2=0.92,K3=1.1,K4=0.66,可得KN=175~246 N/cm2;a為溝槽上口寬度,設計要求a≥50 cm;b為溝槽下底寬度,設計要求b≥38 cm;v為開溝作業速度,設計寬深開溝速度v≥200 m/h;η1為發動機到開溝軸的傳動效率,根據發動機至開溝軸傳動路線中各級傳動效率[14]計算得到傳動總效率η1=0.81。
由式(4)計算得到開溝裝置所需的驅動功率約為 21~29 kW。
2.2.3 行走功率估算 履帶行走裝置所需驅動功率由下式得到:
式中:P2為行走裝置所需驅動功率,kW;F為最大牽引力,N;v2為空載前進速度,根據設計要求v2≥0.5 m/s;η2為履帶行走裝置效率,η2=0.8~0.85;η3為發動機到驅動輪傳動機構的效率,根據發動機至驅動輪傳動路線中各級傳動方式的效率[14]計算得η3=0.7。其中最大牽引力由整機重力進行估算[15]:
由式(5)、式(6)計算得到履帶行走裝置所需的驅動功率約為13~16 kW。
2.2.4 整機布局與底盤結構 根據整機功率需要,選擇額定功率52 kW、額定轉速為2700 r/min的常柴4L88型發動機為主動力。管理機結構如圖4所示,為縮短機身長度和簡化傳動,將發動機橫置于機身前側,換向器安裝在座椅后方并將動力傳遞至液壓懸掛系統,液壓懸掛系統的輸出軸通過萬向節與開溝器輸入軸聯接;施藥裝置沿行進方向安裝于液壓懸掛系統一側,從而盡可能縮短機身長度,減小轉彎半徑。
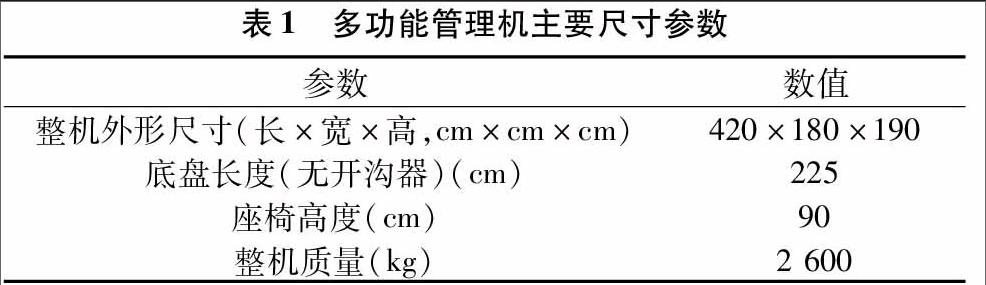
通過行進、開溝載荷測算和機身的布局優化,果園多功能管理機的機身高度和寬度分別控制在190 cm和180 cm,從而滿足了果園行間通過性的要求。未懸掛開溝器的機身長度亦控制在225 cm,但由于單元盤開溝器對懸掛及下刀空間尺寸的需要,整機長度仍達到了420 cm。
3 智能監控系統設計
3.1 設計目標
(1)實現開溝、施肥、施藥各功能啟/停的快速一鍵啟停切換,有效簡化操控流程和降低操控難度;
(2)實現復雜果園地形與作業狀態下的真實油量和藥量準確監測,并及時進行預警和報警;
(3)實現對復雜果園土壤條件下開溝作業載荷的波動、
積累與突變等不同變化規律的分級自動響應。
3.2 硬件設計
根據多功能果園管理機的智能監控目標與簡便操作的實際需求,采用觸摸屏式監控結構,如圖5所示。
3.2.1 負荷反饋調控子系統 為簡化轉矩測量的結構復雜性,通過霍爾速度傳感器測量開溝軸的速度間接反映轉矩的變化規律。在液壓無級變速系統的調速手柄轉軸位置安裝步進電動機,根據反饋信號改變變量泵斜盤轉角,從而調節行進速度。同時,在后輸出軸的前端安裝電磁離合器,實現開溝器與主發動機動力的接通與切斷。
3.2.2 施藥與施肥啟停子系統 在手持式金亮6HYC-80D型彌霧機上進行自動啟停改造,分別由微型隔膜泵進行脈沖發動機供油、由繼電器進行可控觸點吸合打火、并由振動開關實現對脈沖發動機啟動的判斷,進而由電磁閥進行供藥控制,由直流電動機實現彌霧機擺動的可控啟停。同時,由直流電動機實現對排肥器運轉的啟停控制。
3.2.3 液位監測子系統 由主發動機和彌霧機脈沖發動機的需要,該多功能管理機上分別布置了54 L柴油油箱和20 L汽油油箱,2個油箱同350 L藥箱均分別由WMY型擴散硅液位傳感器(測量深度范圍0~60 cm,測量精度0.5%)實現油量與藥量的連續監測。
3.2.4 單片機與觸摸屏 多功能果園管理機智能監控系統需滿足開溝軸轉速、行走速度、油箱液位和藥箱液位與彌霧機振動開關信號的采集,和電磁閥、隔膜泵、HST調節電動機、排肥電動機、點火開關等多類執行對象的控制。根據智能監控系統的設計目標和輸入/輸出類型復雜、數量多的特點,選擇AVR單片機系列中具有豐富的外設資源和串行通信接口的Atmega128單片機和LAVI777A觸摸屏,并采用MODBUS協議實現二者的通信。
3.3 控制流程與功能實現
3.3.1 人機交互界面設計 管理機由單人駕駛并完成多功能作業,因而監控與操控的人機界面必須足夠簡明便捷。如圖6所示,人機界面由油箱與主/副油箱的液量柱和各功能的啟停鍵所構成。人機界面設計采用維控中文組態軟件Levi Studio工程編輯器來實現,并利用Levi Studio軟件完成編程。
3.3.2 開溝負荷反饋與分級響應控制 負荷反饋控制根據監測的開溝軸轉速變化規律,識別其不同的開溝載荷特性,進而實現分級響應(圖7)。
(1)過載調控。當開溝轉速穩定值低于根據傳動計算得到的理論轉速時,表明處于過載開溝作業狀態,則通過電動機轉動以減小HST變量泵的容積,從而降低行走速度,使開溝作業載荷減小直至穩定于理論值。
(2)防堵調控。當出現開溝轉速持續下降趨勢,表明開溝器出現由于排土不暢或雜草纏繞等造成的堵塞,則通過控制步進電動機降低行進速度,直至開溝轉速重新穩定于理論值,從而避免堵死停機。
(3)安全保護。當出現開溝轉速的快速急劇下降,意味著開溝過程中遇到樹根甚至石塊等障礙物,則電磁離合器迅速切斷開溝器的動力輸入并進行報警,以實現對發動機、傳動系統和開溝器的安全保護。
3.3.3 液量監控預警 針對果園作業中復雜的地面坡度、速度變化、地面性質變化、坑洞與障礙物干擾等多種工況干擾,通過對液位原始測量信號的“坡度校正+低通濾波+中值濾波”進行復合濾波處理,提供穩定準確的液量信息,以防止提供錯誤信息和發生誤報警。當液量低于20%時,液量柱變黃預警;當液量低于10%時液量柱變紅并聲音報警,提示駕駛人員停止施藥作業;當液量低于5%時,施藥系統自動停止作業。
4 田間試驗
4.1 樣機開發
根據上述設計結果,成功開發了智能型果園多功能管理機樣機,其主要尺寸參數如表1所示。
4.2 果園試驗
4.2.1 試驗條件 2014年11月23日,在鎮江市京口區瑞京園桃園基地由江蘇省農業機械試驗鑒定站進行了樣機試驗鑒定(圖8)。桃園土壤為黏土,坡度約10°,地面有部分雜草覆蓋。0~40 cm土壤平均含水率為26.8 %,平均堅實度為16.53 kg/cm3。果樹行距6 m,株距平均為3.5 m,平均果樹高度2.5 m。
4.2.2 性能與參數 試驗表明,該管理機的高度和寬度能滿足行間作業要求,具有良好的通過性,但懸掛開溝器時機身較長,換行轉彎較為困難;在果園坡度變化、地面不平、速度時變的復雜工況下,液量監控波動小,報警響應準確;機器能夠實現各功能的一鍵啟停切換與自變速控制功能。試驗鑒定結果如表2所示,樣機達到了設計要求。
5 結論
(1)根據果園規格及設計要求,設計開發了開溝、施肥、施藥多功能一體式果園管理機,機身高度和寬度分別控制在190 cm和180 cm,從而滿足果園低矮種植模式下的行間作業要求。
(2)設計了觸摸屏式智能監控系統,實現了多功能一鍵啟/停切換、復雜工況下的開溝自變速控制與液量準確監控的分級響應,保證了多功能管理機作業的可靠性及便捷操作性。
(3)試驗結果表明該機通過性較好,在實際果園條件下順利實現了一鍵啟停、液量監控與自變速控制功能,滿足了開溝、施藥、施肥的設計指標要求,為果園作業提供了新型多功能一體裝備。
(4)受限于寬深開溝要求和單圓盤式開溝結構,懸掛開溝器后機身仍然偏長,有待進一步優化。
參考文獻:
[1]常有宏,呂曉蘭,藺 經,等. 我國果園機械化現狀與發展思路[J]. 中國農機化學報,2013,34(6):21-26.
[2]Sanders K F. Orange harvesting systems review[J]. Biosystems Engineering,2005,90(2):115-125.
[3]Bodin A. Development of a tracked vehicle to study the influence of vehicle parameters on tractive performance in soft terrain[J]. Journal of Terramechanics,1999,36(3): 167-181.
[4]楊學軍,嚴荷榮,徐賽章,等. 植保機械的研究現狀及發展趨勢[J]. 農業機械學報,2002,33(6):129-131,137.
[5]王海波,劉鳳之,王孝娣,等. 我國果園機械研發與應用概述[J]. 果樹學報,2013,30(1):165-170.
[6]閆國琦,張鐵民,徐相華,等. 我國微耕機技術現狀與發展趨勢[J]. 安徽農業科學,2008,36(25):11137-11139,11148.
[7]李 倩,宋月鵬,高東升,等. 我國果園管理機械發展現狀及趨勢[J]. 農業裝備與車輛工程,2012(2):1-3,7.
[8]王晶晶,王文斌,羅 微,等. 南方長期作物配方施肥技術的問題與對策[J]. 中國農學通報,2010,26(9):220-225.
[9]張書慧,馬成林,杜巧玲,等. 精確農業自動變量施肥機控制系統設計與實現[J]. 農業工程學報,2004,20(1):113-116.
[10]劉成蓮. 2BMF-5型免耕施肥播種機排種(肥)箱的設計[J]. 農業技術與裝備,2008(12):20-21.
[11]劉繼展,王 芹,詹國祥,等. 果園雙擺彌霧施藥系統設計[J]. 農業機械學報,2014,45(12):109-116.
[12]陳玉侖,丁為民,汪小旵,等. 稻麥聯合收獲開溝埋草多功能一體機設計[J]. 農業機械學報,2009,40(8):62-66.
[13]中國農業機械科學研究院. 農業機械設計手冊:上[M]. 北京:中國農業科學技術出版社,2007:237-238.
[14]邱宣懷,郭可謙,吳宗澤,等. 機械設計[M]. 4版. 北京:高等教育出版社,2004:251.
[15]張玉川,蔡 禺. 進口液壓挖掘機國產化改造[M]. 成都:西南交通大學出版社,1999:60.
猜你喜歡
今日農業(2022年15期)2022-09-20 06:56:20
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
雜文月刊(2016年1期)2016-02-11 10:35:51
現代企業(2015年8期)2015-02-28 18:54:47
兒童故事畫報(2013年3期)2013-06-24 05:40:30
現代企業文化·綜合版(2011年6期)2011-06-24 05:30:44
