模塊化三電平APF關鍵技術綜述
2016-04-27 07:42:11周京華祝天岳陳亞愛章小衛
電源技術 2016年7期
周京華,祝天岳,陳亞愛,章小衛
(北方工業大學電力電子與電氣傳動工程研究中心,北京100144)
模塊化三電平APF關鍵技術綜述
周京華,祝天岳,陳亞愛,章小衛
(北方工業大學電力電子與電氣傳動工程研究中心,北京100144)
目前,大量的電力電子裝置將會產生諧波電流并注入電網,導致電網污染日益嚴重,通常采用APF治理電網諧波。在高壓、大功率場合中,三電平APF與傳統兩電平APF相比優勢更大,同時考慮模塊化便于擴容,因此模塊化三電平APF成為諧波治理的研究熱點。對目前國內外三電平APF的關鍵技術進行分析和歸納,主要包括濾波器設計、非理想電網下的諧波電流檢測、電流跟蹤控制、中點平衡控制及APF模塊并聯控制,為模塊化三電平APF的理論研究與工程應用提供參考。
三電平APF;濾波器設計;諧波電流檢測;電流跟蹤控制;中點平衡控制;模塊并聯控制
隨著電力電子技術的發展,越來越多的電力電子裝置廣泛應用于各個領域,導致大量的諧波電流注入電網,給電力系統的正常工作帶來了一系列問題。因此,APF作為一種動態抑制諧波的裝置得到廣泛關注和研究[1]。由于兩電平APF其自身拓撲結構及開關器件耐壓水平的限制,難以實現對高壓大容量非線性負載進行諧波抑制,模塊化三電平APF成為研究的熱點。模塊化三電平APF的補償方式靈活,可用于不同容量及要求的諧波補償場合,而且有利于標準化、大規模生產[2-3]。
模塊化三電平APF的抑制諧波效果與自身參數設計及其控制策略有著密切的關系。由于輸出濾波器設計對三電平APF系統的抑制諧波效果及成本有著很大的影響,因此我們首先介紹三電平APF輸出濾波器設計,在此基礎上對模塊化三電平APF關鍵技術進行綜述,為模塊化三電平APF的理論研究與工程應用提供參考。
1 三電平APF輸出濾波器設計
三電平APF輸出濾波器的設計對系統的諧波抑制效果至關重要,也對系統的成本有很大影響,論文主要對L濾波器設計和LCL濾波器設計進行分析。
1.1 L濾波器設計
目前,APF的輸出濾波器通常采用L濾波器。L濾波器結構簡單,但為了有效抑制APF紋波電流通常需要較高的開關頻率和較大的濾波器電感。電感值的增加會導致系統的動態性能變差,還增加濾波器的成本,而電感值的減小又會導致電流紋波變大[4]。
文獻[5]給出一種適合于三電平APF的L濾波器參數設計方法。首先根據三電平APF的設計補償容量和補償實時性要求能計算出電感取值的上限值;再根據三電平APF的輸出電流紋波率要求能計算出電感取值的下限值,從而選取電感參數。這種方法濾波器設計方法簡單,但濾波效果達到最佳。
1.2 LCL濾波器設計
1.2.1 LCL濾波器參數設計
LCL濾波器可兼顧低頻段增益和高頻段衰減,獲得比傳統的L濾波器更好的輸出電流特性,所需總電感值較小,但其參數設計比較復雜,對系統的穩定性影響較大,需引入阻尼控制[6]。近年來LCL濾波器成為研究者關注的焦點。
APF的控制目標為消除負載電流中的諧波電流,其中APF輸出的補償諧波電流包含低次諧波及開關頻率處的電流紋波。這就要求LCL濾波器不能濾除所檢測出來的低次諧波,又能有效抑制輸出開關頻率處的電流紋波。因此,APF的LCL濾波器參數設計方法與PWM整流器的LCL濾波器參數設計方法不完全相同。為滿足上述要求,文獻[7]給出了APF的 LCL濾波器的諧振頻率fr設計范圍為,其中,fhmax為補償最大諧波頻率,fs為開關頻率。并綜合考慮諧振頻率、無功約束和系統動態性能要求,最終設計出LCL濾波器參數。
1.2.2 LCL濾波器阻尼控制
為有效解決LCL濾波器引起的諧振問題,可加入無源阻尼控制或有源阻尼控制。無源阻尼控制是通過在電容端串入電阻實現系統穩定,該方法穩定可靠,但由于加入電阻會增加系統不必要的損耗。有源阻尼控制是通過修正控制算法實現阻尼的作用,使系統達到穩定,從而消除諧振作用。有源阻尼控制目前主要有狀態變量反饋法、虛擬電阻法和遺傳算法等方法。
文獻[6]中采用基于電容電流狀態反饋的LCL濾波器有源阻尼控制方法,根據系統的傳遞函數推導出有源阻尼比例系數Kd,實現系統的穩定控制,其系統控制框圖如圖1所示。
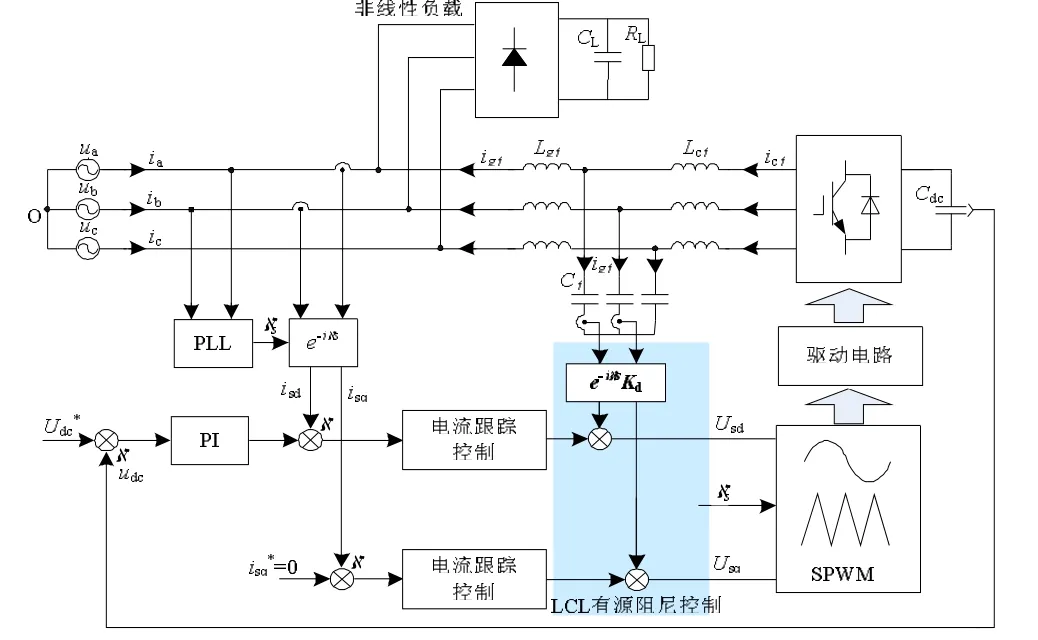
圖1 基于有源阻尼LCL的APF控制框圖
2 非理想電網下的諧波電流檢測
APF實現抑制諧波電流的首要問題是快速、準確地提取出負載電流中的諧波電流。目前,諧波電流檢測常采用基于瞬時無功功率理論的p-q法和ip-iq諧波檢測方法。但上述諧波電流檢測方法前提是在非理想電網下快速、準確地提取出電網電壓的基波正序分量。在實際電力系統中,電網電壓不平衡及畸變情況普遍存在。因此,在非理想電網下,快速、準確地提出負載電流的諧波電流對APF系統至關重要[8]。
文獻[9]通過對三相電壓、負載電流進行坐標變換,求出負載電流中的基波正序分量,最后將不對稱的負載電流減去其基波正序分量可得到補償電流指令值,其諧波檢測原理圖如圖2所示。該方法可以在電網電壓不平衡及畸變的非理想情況提取出諧波電流,并且可以計算任意次諧波電流。
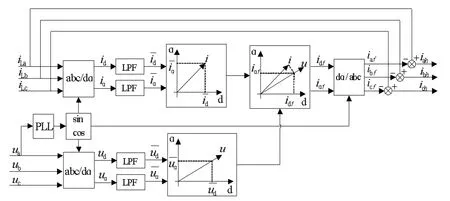
圖2 非理想電網下的諧波檢測原理圖
3 三電平APF電流跟蹤控制策略
三電平APF電流跟蹤控制能實現APF輸出的補償電流準確地跟蹤上電流指令值,完成諧波電流的抑制。電流跟蹤制策略是決定三電平APF補償效果的關鍵因素之一。目前,三電平APF的電流跟蹤控制策略主要有滯環控制、無差拍控制、單周控制、預測控制、重復控制、滑模控制和模糊控制等。
3.1 滯環控制
滯環控制是通過補償電流與指令電流之間的偏差,經過滯環比較器控制主電路的開關器件動作,最終實現補償電流跟蹤上指令電流。其具有動態響應速度快和穩定性好,但是滯環寬度制約著系統的響應速度及電流跟蹤的精度。
文獻[10]給出了一種應用于三電平APF的滯環控制方法,其控制框圖如圖3所示。通過對補償電流ic進行坐標變換得到ic(x,y),并求出與諧波檢測得到指令電流i*c(x,y)的偏差,再將該偏差送至五電平滯環控制器,其中五電平滯環控制器是由四個不同滯環比較器組成的。根據滯環控制器輸出的控制量、電流空間矢量所在的扇區以及三電平主電路中點電容的偏差選擇三電平的開關器件動作,從而實現三電平APF抑制諧波電流。該控制系統響應速度快,開關器件的動作次數明顯少于其他控制策略。
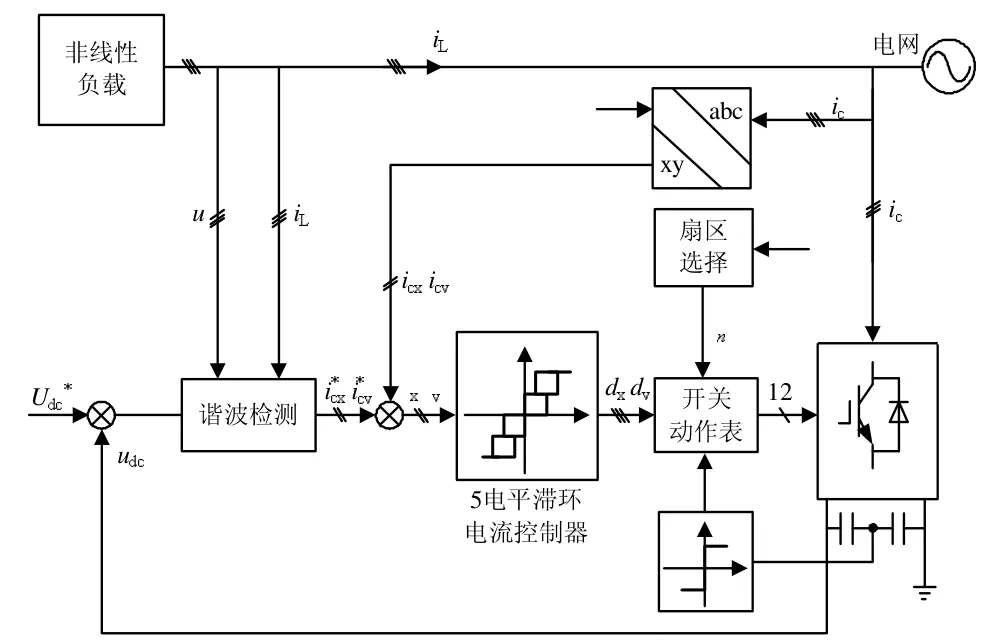
圖3 滯環控制框圖
3.2 無差拍控制
無差拍控制是一種根據當前時刻的狀態數據和系統的狀態方程推算出下一時刻開關控制量,最終實現輸出量跟蹤上輸入量的控制策略。無差拍控制具有數學推導嚴密、跟蹤精度高、動態響應速度快,但采樣數據的延時性及指令電流的準確預測性制約著無差拍控制的效果[11]。
文獻[12]提出了一種基于重復預測的三電平APF無差拍控制方案,其控制框圖如圖4所示。該方案由狀態觀測器和重復預測型觀測器組成,在k-1時刻采樣得到該時刻的補償電流ic(d,q)(k-1),狀態觀測器給出下一拍補償電流觀測值由重復預測觀測器可平推出下兩拍的諧波指令電流預測值i*c(d,q)(k-1),由此可以計算出k采樣周期指令電壓u*d(k)和u*q(k)。從而達到電流誤差等于零的控制目標。
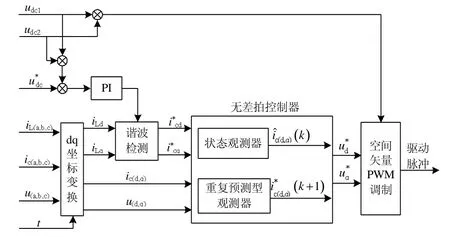
圖4 無差拍控制框圖
3.3 單周控制
單周控制是一種大信號、非線性的控制方法,又稱積分復位控制。單周控制具有開關調制頻率恒定、控制電路結構簡單、控制精度高、穩定性能好、魯棒性好等優點[13]。但其控制系統要求電網電壓不存在畸變,并且只能同時補償無功電流和諧波電流,存在一定的局限性。
單周控制應用于APF系統時,不需要檢測諧波電流和指令電流的計算,在每個開關周期內強迫開關變量的平均值與控制參考量相等或成比例,從而消除穩定和瞬態誤差。文獻[14]使用模擬器件搭建矢量模式的單周控制器并應用于三電平APF系統,其控制電路如圖5所示。該文獻中單周控制器是通過電網電壓和負載電流檢測進行電流選擇,并與直流側母線電壓調節量進行比較,最后通過鎖存器發出脈沖信號。單周控制三電平APF的控制器結構簡單,響應速度快。

圖5 矢量模式單周控制電路
3.4 預測控制
預測控制是一種基于模型的優化閉環控制方法,通過利用當前和之前數據的偏差以及預測未來的偏差,實現被控對象的未來輸出的預測。預測控制具有模型預測、滾動優化和反饋校正三個基本特征,這三個要素也是有別于其它控制方法的關鍵。預測控制有很好的魯棒性,但是其控制系統設計復雜。
文獻[15]根據預測控制的基本結構和APF的數學模型得到電流預測控制的結構圖,其中a相電流預測控制框圖如圖6所示。APF系統對實時性要求很高,采用參數模型對其輸出進行精確預測,并且使用指令電流和實際補償電流進行合成參考軌跡,這樣一方面可以使控制系統輸出達到給定的指令電流i*a,又可以使當前輸出電流ia(k)使系統輸出保持一定的柔性。為了消除預測模型與實際系統的誤差,需要對開環預測進行修正,對預測模型的輸出進行反饋校正,形成閉環預測。
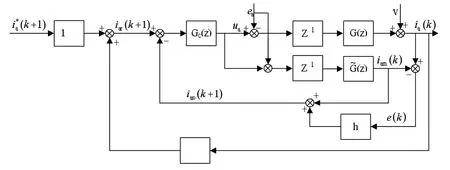
圖6 電流預測控制框圖
4 三電平APF中點平衡控制策略
三電平APF中點電位不平衡將會造成輸出電流波形畸變率增大,影響三電平APF補償電流的精度,甚至有可能造成直流側電容及功率開關器件的損壞[16]。因此,中點平衡控制策略是三電平APF研究的關鍵問題之一。
4.1 基于零序電壓注入的中點平衡控制策略
基于零序電壓注入的中點平衡控制是通過在調制電壓中注入零序電壓u0(t),使中點電流為零。文獻[17]針對三電平APF直流側電容中點電位平衡問題,給出了一種基于零序電壓注入的控制策略。通過分析直流側中點電位波動模型,推導出注入精準的零序電壓公式;并給出一種滯后判斷求解三相調制電壓符號的判斷方法,實現三電平APF中點電位的平衡。
4.2 基于時間因子的中點平衡控制策略
文獻[18]提出一種精確計算冗余小矢量時間控制因子的中點平衡控制策略。當參考電壓矢量落在1、2扇區,根據當前時刻小矢量的電壓平衡能力、中矢量對兩電容電壓的影響情況及中點電位的偏差,精確計算出冗余小矢量時間控制因子,實現抑制中矢量對中點電位平衡的影響;當參考電壓矢量落在的3、4扇區,對應兩組完全不同的開關序列,通過判斷兩對冗余小矢量的平衡能力選擇合適的開關序列,并根據當前時刻非冗余小矢量和中矢量對兩電容電壓的影響情況及中點電位的偏差,精確計算出冗余小矢量時間控制因子,實現抑制非冗余小矢量、中矢量對中點電位平衡的影響。
4.3 基于虛擬空間矢量的中點平衡控制策略
文獻[19]分析了傳統SVPWM最近三矢量合成方法中點電位存在不能平衡的區域,利用基于虛擬空間矢量的調制方法,實現中點電位平衡控制。虛擬小矢量產生的中點電流為零,不影響中點電壓平衡;虛擬中矢量其產生的中點電流為零,也不影響中點電壓平衡。通過組合新的虛擬小矢量和虛擬中矢量,能夠控制中點電位平衡。
5 APF模塊并聯控制策略
目前,模塊化APF裝置主要通過多臺小容量的APF并聯進行擴容,根據并聯控制及負載電流檢測位置可以將APF模塊并聯控制方式分為集中控制、主從控制及分布控制[20-21]。
5.1 模塊化APF集中控制
集中控制是指用一套電流互感器接入負載交流側進線端檢測負載電流,通過集中控制單元將檢測的負載電流信號進行數據處理,分配給各APF模塊的一種控制。通過集中控制器檢測負載電流并計算預消除的電流諧波分量,將3、5、7次電流諧波分量分配給對應的APF模塊以消除系統特定階次電流諧波,如圖7所示。
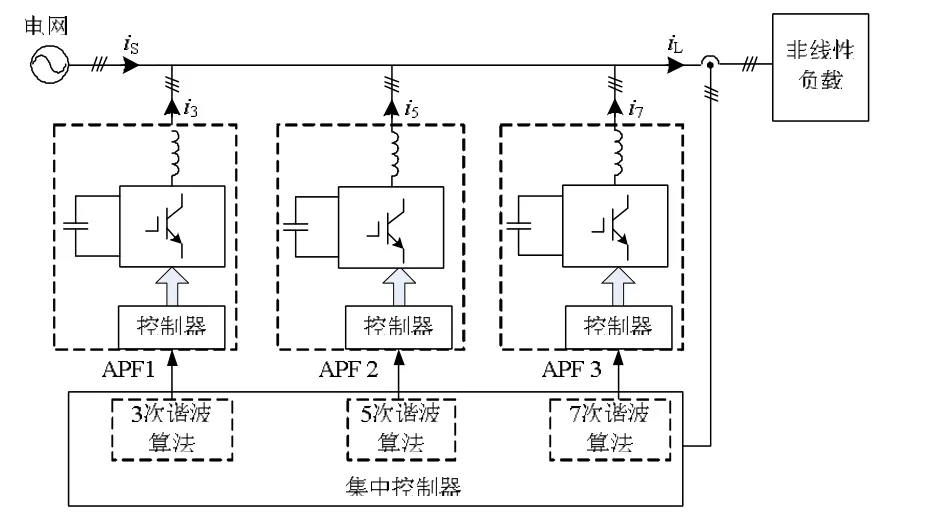
圖7 模塊APF集中控制方式
集中控制方式,僅使用一套電流互感器,可以節約成本。集中控制單元負責檢測負載電流及補償電流的分配,一旦集中控制單元出現故障,整個系統就會崩潰。另外,由于共用一套電流互感器,將會造成在所有的APF模塊的控制信號地線之間耦合,不可避免地引入干擾。
5.2 模塊化APF主從控制
模塊化APF主從控制是指用一套電流互感器接入負載交流側進線端,主機通過總線將負載電流信號及均流系數傳遞給APF從機模塊的一種控制。系統主機可選擇明確模塊作為主機,也可通過開機競爭自主選擇主機。文獻[22]采用N+1模塊冗余控制,所有APF模塊僅使用一套電流互感器;系統開機時首先完成系統自檢和初始化的正常模塊將作為主機,完成主機競爭,當系統主機出現故障,產生新主機。APF模塊中的DSP控制器完成檢測負載電流諧波,主機通過485總線將均流系數傳遞給從機模塊,如圖8所示。
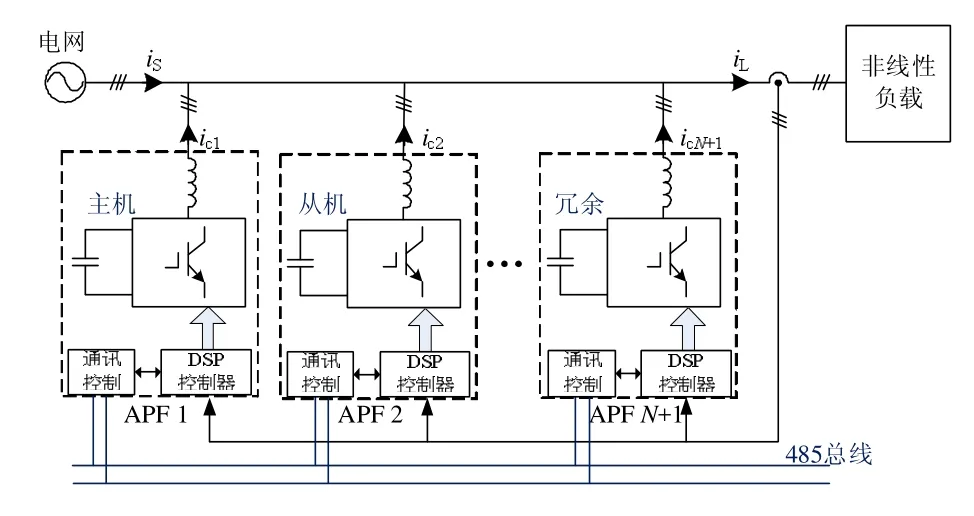
圖8 模塊化APF主從控制方式
主從控制方式下,當主機出現故障,系統選擇一臺從機模塊作為新主機,系統不會崩潰,可提高系統的可靠性。但由于系統共用一套電流互感器和各模塊獨立檢測負載電流,必須保證所有APF模塊檢測負載電流同步,加大了系統的控制難度。
5.3 模塊化APF分布控制
模塊化APF分布式控制是指用多組電流互感器檢測負載電流,每臺APF可以獨立工作的一種控制。根據互感器的安裝位置不同分為兩種方案:方案I是互感器分散安裝于該模塊補償電流注入點靠近負載側;方案II是互感器集中安裝于負載側。采用分布式控制方案I的安裝方式,五個APF模塊每臺都可以獨立補償電流諧波,如圖9所示。方案I實現電流諧波補償需在所有APF模塊之間平均分配,APF模塊1、2……N對應的均流系數分別為1/N、1/(1)……1。但由于實際系統運行時APF模塊可能會出現隨機性的故障,造成并聯運行模塊臺數發生改變,使系統的均流系數更新復雜。
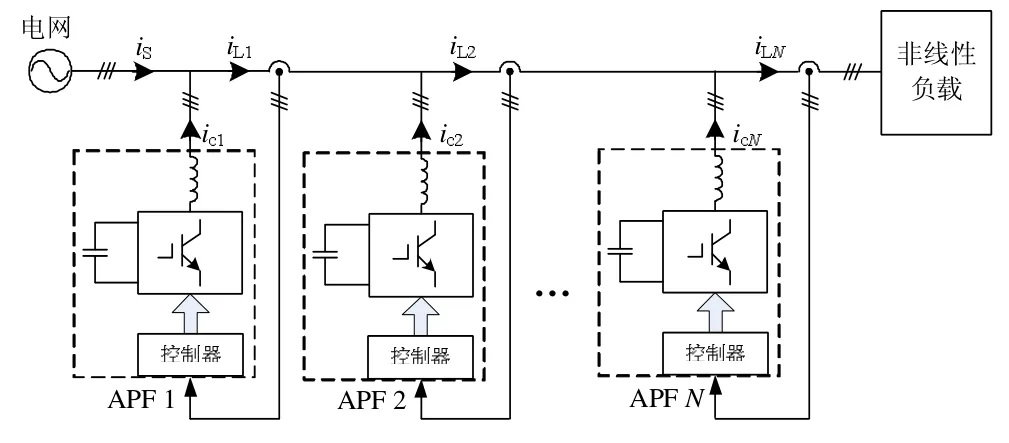
圖9 模塊化APF分布控制方案I
文獻[20]采用N+1模塊冗余控制,采用分布式控制方式方案II的安裝方式,每個模塊可以獨立檢測和補償電流諧波,如圖10所示。文獻闡述多模塊并系統建模和分析器穩定性,并給出該方式下的均流系數為方案II均流系數確定及更新較為簡單,均流系數等于并聯補償系統模塊臺數的倒數,并且隨著運行APF模塊臺數的變化而變化。
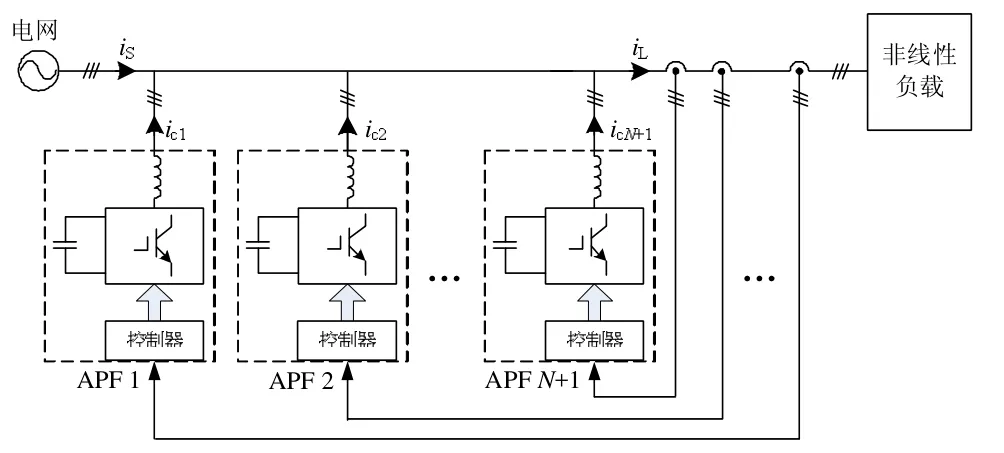
圖10 模塊化APF分布控制方案II
分布控制方式可以克服集中控制和主從控制系統使用一套電流互感器時,控制信號在各模塊之間的耦合;系統的可靠性大大提高,危險性分散,更容易功能擴展。但是由于分布控制方式需要電流互感器的個數增加,也就加大系統的故障點和系統的生產成本。
6 結論
三電平APF與傳統的兩電平APF相比在高壓、大功率場合更具優勢,但三電平APF的電流跟蹤控制策略及中點平衡控制策略制約著APF的補償精度和系統動態響應速度。為獲得高效的APF輸出電流性能,LCL濾波器的設計及有源阻尼控制策略成為研究的重點。同時在電網電壓不平衡或畸變的非理想電網下,三電平APF仍然能夠快速、準確地提取出諧波電流是需要解決的首要問題。目前,APF模塊并聯控制策略基本上都是針對基于L濾波器的兩電平APF,而基于LCL濾波器的三電平APF模塊并聯控制策略需要進一步深入研究。因此,基于LCL濾波器的模塊化三電平APF將具有較高的研究價值和應用潛力,將成為治理諧波市場的主流產品。
[1]CORASANITIV F,BARBIERIM B,ARNERA P L.Compensation with hybrid active power filter in an industrial plant[J].IEEE Latin America Transactions,2013,11(1):447-454.
[2]VODYAKHO O,M IC C.Three-level inverter-based shunt active power filter in three-phase three-w ire and four-wire systems[J].IEEETransactionson Power Electronics,2009,24(5):1350-1363.
[3]商少鋒,陳識微,蔣魯軍.模塊化并聯型低壓有源電力濾波裝置的設計與工程應用[J].電網技術,2008,32(3):93-98.
[4]鞠建永,陳敏,徐君,等.并聯有源電力濾波器交流側輸出濾波器設計[J].電機與控制學報,2010,14(10):15-20.
[5]黃智昊.三電平有源濾波器控制策略研究[D].哈爾濱:哈爾濱工業大學,2013.
[6]YIT,POH C L,PENGW,etal.Generalized design of high performance shunt active power filter w ith output LCL filter[J].IEEE Transactionson Industrial Electronic,2009,59(3):1443-1452.
[7]武健,徐殿國,何娜.并聯有源濾波器輸出LCL濾波器研究[J].電力自動化設備,2007,27(1):17-20.
[8]M IHAELA P,ALEXANDRU B,VLAD S.A DSP-based implementation of the p-q theory in active power filtering under nonideal voltage conditions[J].IEEE Transactionson Industrial Informatics,2013,9(2):880-889.
[9]游小杰,李永東,VICTOR V,等.并聯型有源電力濾波器在非理想電源電壓下的控制[J].中國電機工程學報,2004,24(2):56-61.
[10]VODYAKHO O,HACKSTEIN D,STEIMEL A,et al.Novel direct current-space-vector control for shunt active power filters based on the three-level inverter[J].IEEE Transactions on Power Electronics,2008,23(4):1668-1679.
[11]HAN Y,XU L,KHAN M M,et al.Robust deadbeat control scheme for a hybrid APFwith resetting filter and ADALINE-Based harmonic estimation algorithm[J].IEEE Transactions on Industrial Electronics,2011,58(9):3893-3904.
[12]何英杰,劉進軍,王兆安,等.基于重復預測原理的三電平APF無差拍控制方法[J].電工技術學報,2010,25(2):114-120,133.
[13]ALVESD M B A,PEREZ VIEIRA PK,CABRALD SER.Application of the one-cycle control technique to a three-phase threelevel npc rectifier[J].IEEE Transactions on Industrial Applications,2014,50(2):1177-1184.
[14]陳兵,謝運祥,宋靜嫻.矢量模式單周控制三相三線制三電平有源電力濾波器[J].電力自動化設備,2008,28(6):6-11.
[15]王峰,張旭隆,何鳳有,等.基于復合模型預測控制策略的三電平APF研究[J].電力系統保護與控制,2014,11:79-85.
[16]JIAO Y,LEE F C,LU S.Space vector modulation for 3-level NPC converter with neutral point voltage balance and sw itching loss reduction[J].IEEE Transactionson Power Electronics,2013,99:1-12.
[17]孫華,張曉,孔令軍,等.三電平APF直流側電容電壓控制研究[J].電力電子技術,2011,45(5):49-51.
[18]ZHANG H B,FINNEY S J,MASSOUD A,et al.An SVM algorithm to balance the capacitor voltages of the three-level NPC active power filter[J].IEEE Transactions on Power Electronics,2008,23(6):2694-2702.
[19]BUSQUETS-MONGE S,BORDONAU J,BOROYEVICH D,et al.The nearest three virtual space vector PWM A modulation for the comprehensive neutral-point balancing in the three-level npc inverter[J].IEEEPower Electronics Letters,2004,2(1):11-15.
[20]鞠建永,陳敏,徐君,等.模塊化并聯有源電力濾波器[J].電機與控制學報,2008,12(1):20-26.
[21]徐長波,魯偉,李春文.大容量并聯有源電力濾波器的模塊化控制策略[J].電力系統自動化,2013,37(8):117-122.
[22]王華鳳.有源電力濾波模塊組合系統的研究[D].杭州:浙江大學,2006.
Review of key technologiesofmodularized three-level APF
ZHOU Jing-hua,ZHU Tian-yue,CHEN Ya-ai,ZHANG Xiao-wei
(PowerElectronicsand MotorDrive Engineering Research Center,North China University ofTechnology,Beijing 100144,China)
Harmonics are injected into the grid w ith numerous power electronic devices app lied,which makes the grid polluted seriously,thus APF are usually adopted to elim inate these harmonics.In the application of high voltage and high power,com pared w ith the traditional APF,the three-level APF has greater advantage.In order to take into account the expansion ofmodules,the modularized three-level APF has become a research focus.The domestic and foreign key technologies of three-levelAPFwere analyzed and summarized,including filter design,harmonic current detection under nonidealgrid voltage,current tracking control,neutralpointbalancing controland the APF modules parallel control,providing reference for the research and engineering application of the modularized three-levelAPF.
three-level APF;filter design;harmonic current detection;current tracking control;neutral-pointbalance control;modules parallelcontrol
TM 934
A
1002-087X(2016)07-1536-05
2015-12-02
北京市自然科學基金項目(3142008);北京市優秀人才培養項目(2012D005002000009)
周京華(1974—),男,山西省人,博士,教授,主要研究方向為大功率變流技術。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
能源工程(2020年6期)2021-01-26 00:55:22
現代裝飾(2020年5期)2020-05-30 13:01:56
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
通信電源技術(2016年1期)2016-04-16 04:57:26
