基于信號(hào)極化三維平穩(wěn)性的飛行器姿態(tài)估計(jì)
2016-04-26 05:02:18黃海行陳廣東
無線電工程 2016年4期
黃海行,陳廣東,陳 智
(南京航空航天大學(xué) 無人駕駛飛機(jī)研究院,江蘇 南京 10016)
?
基于信號(hào)極化三維平穩(wěn)性的飛行器姿態(tài)估計(jì)
黃海行,陳廣東,陳智
(南京航空航天大學(xué) 無人駕駛飛機(jī)研究院,江蘇 南京 10016)
摘要以電磁波為參照的飛行器姿態(tài)測量研究,可彌補(bǔ)空間參照物缺乏,豐富姿態(tài)測量手段。利用3個(gè)正交電(磁)場傳感器接收電磁波三維電(磁)信號(hào),測量運(yùn)動(dòng)平臺(tái)姿態(tài)。該方法根據(jù)姿態(tài)參數(shù)估計(jì)的CRB(克拉美—羅界)是否為有限值,判斷該環(huán)境電磁波信號(hào)能否用于運(yùn)動(dòng)平臺(tái)姿態(tài)測量;根據(jù)基準(zhǔn)姿態(tài)與實(shí)時(shí)姿態(tài)互相關(guān)矩陣變化,估計(jì)得到實(shí)時(shí)天線坐標(biāo)系到基準(zhǔn)天線坐標(biāo)系的轉(zhuǎn)換矩陣,據(jù)此將實(shí)時(shí)姿態(tài)坐標(biāo)系下的運(yùn)動(dòng)平臺(tái)姿態(tài),轉(zhuǎn)換到基準(zhǔn)姿態(tài)坐標(biāo)系下,再轉(zhuǎn)換到地理坐標(biāo)系下,完成運(yùn)動(dòng)平臺(tái)姿態(tài)感知。電磁波信號(hào)可以為獨(dú)立或相干信號(hào),波達(dá)方向和極化狀態(tài)任意,可不受多徑效應(yīng)困擾。仿真試驗(yàn)表明該方法穩(wěn)定有效。
關(guān)鍵詞電磁矢量傳感器;極化狀態(tài);波達(dá)方向;姿態(tài)導(dǎo)航
Aircraft Attitude/Heading Estimation Based on 3D Statistical Characteristics of Polarization Electric (Magnetic) Stable Signal
HUANG Hai-xing,CHEN Guang-dong,CHEN Zhi
(ResearchInstituteofUnmannedAircraft,NanjingUniversityofAeronautics&Astronautics,NanjingJiangsu210016,China)
AbstractThe attitude measurement based on electromagnetic wave can make up for the lack of spatial reference,and enrich the method of attitude measurement.In this paper,moving platform attitude is measured from the electromagnetic waves received by the three orthogonal dipole electric (magnetic) antennas.The CRB (Cramer Rao Bound) of the parameters estimation will determine whether the environmental electromagnetic wave signal can be used to measure moving platform Attitude/Heading.The transformation matrix,from the real-time antenna coordinates to the reference antenna coordinates,is obtained by comparing their correlation matrixes.We convert the platform attitude of the real-time antenna coordinates,into the reference antenna coordinates,then into the geographical coordinates.And the platform attitude is percept.The electromagnetic wave signals can be independent or coherent signal,and the attitude/heading estimation is not affected by multipath effect.Simulation experiment shows that the method is stable and effective.
Key wordsEM Vector Sensor;state of polarization;DOA(wave direction of arrival);attitude determination
0引言
人造的和自然界的各種電磁波充斥著地球表面和太空,這些電磁波信息與接收平臺(tái)姿態(tài)具有密切關(guān)聯(lián)性,電磁波提供的姿態(tài)基準(zhǔn)不受運(yùn)動(dòng)平臺(tái)姿態(tài)及其運(yùn)動(dòng)影響,可以像利用地磁場指南那樣利用電磁波測量運(yùn)動(dòng)平臺(tái)姿態(tài)。國內(nèi)外都研究在地球衛(wèi)星導(dǎo)航系統(tǒng)接收端,利用多點(diǎn)接收、三角計(jì)算的方法感知姿態(tài)[1-9],缺點(diǎn)是體積大、精度低、系統(tǒng)復(fù)雜和速度慢,影響了該技術(shù)的推廣應(yīng)用。本文利用3個(gè)正交電(磁)場傳感器接收電磁波三維電(磁)信號(hào)測量運(yùn)動(dòng)平臺(tái)姿態(tài),可以單點(diǎn)測量飛行器姿態(tài),接收信號(hào)既可以相互獨(dú)立,也可以相干,信號(hào)數(shù)任意,波達(dá)方向和極化狀態(tài)任意,各信號(hào)強(qiáng)弱任意,因此不受多徑效應(yīng)困擾,既可以利用主動(dòng)發(fā)射電磁波信號(hào),也可以被動(dòng)接收空間分布的廣播電磁波信號(hào)測量姿態(tài),提高了系統(tǒng)的隱蔽性,進(jìn)一步揭示了電磁波測量姿態(tài)的能力。
1信號(hào)模型
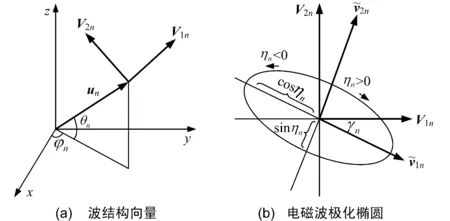
圖1 極化電磁波橢圓狀旋轉(zhuǎn)電場波結(jié)構(gòu)
電磁矢量傳感器接收單元示意圖如圖2所示。全電磁矢量傳感器包含3個(gè)正交電場和3個(gè)正交磁場接收單元。
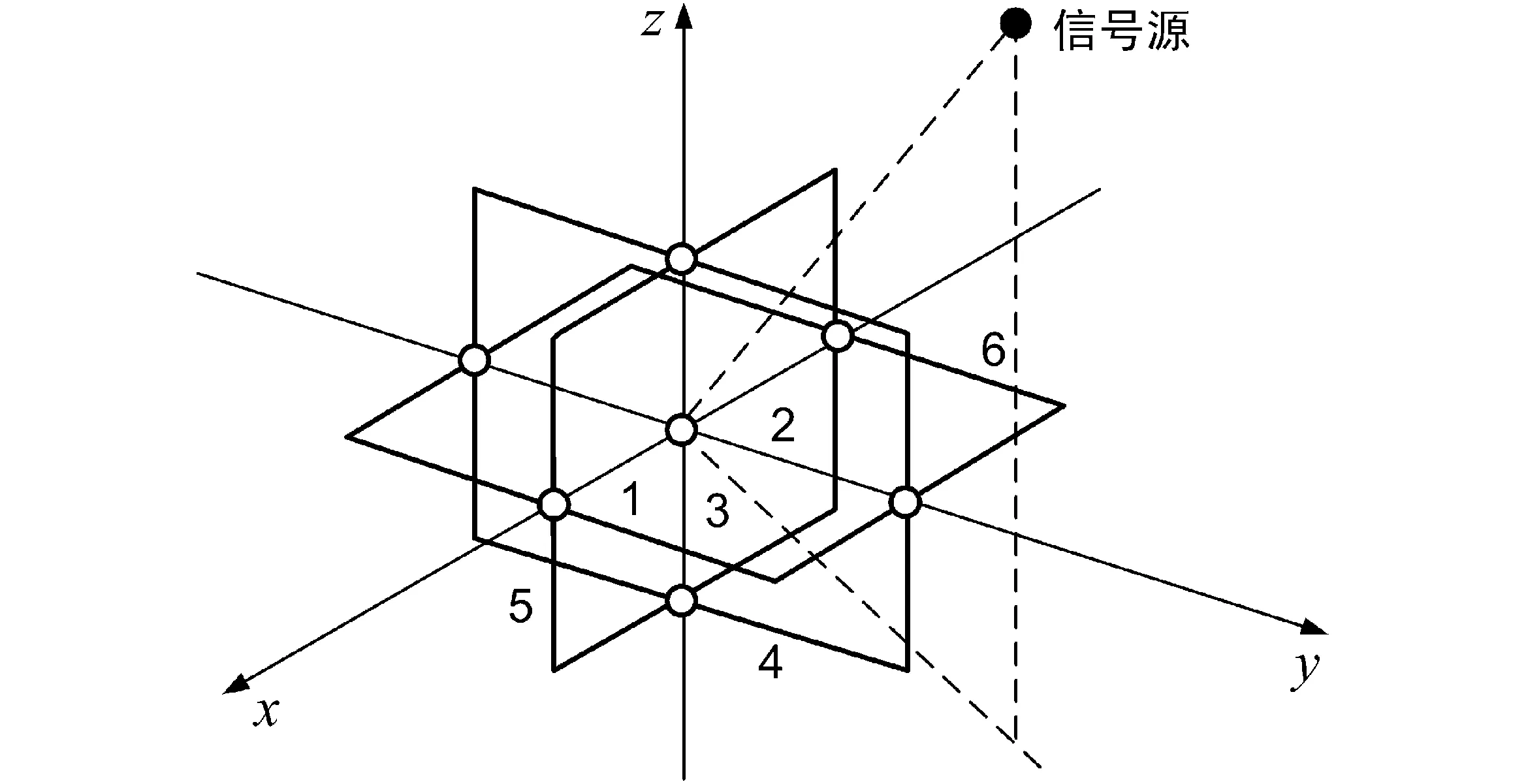
圖2 電磁矢量傳感器接收單元示意
3個(gè)正交電場傳感器為3正交偶極子天線,在基準(zhǔn)姿態(tài)從第n信號(hào)源接收到的信號(hào)導(dǎo)向矢量表達(dá)為[10]:
式(1)信號(hào)導(dǎo)向矢量可進(jìn)一步表示為:
an=BnDn。
(2)
式中,Bn為波結(jié)構(gòu)坐標(biāo)系(見圖1) 到平臺(tái)天線坐標(biāo)系的轉(zhuǎn)換矩陣,

Bn= cosφn-sinφn0sinφncosφn0001é?êêêù?úúúcosθn0-sinθn010sinθn0cosθné?êêêù?úúú·
2姿態(tài)測量基本原理


平穩(wěn)的固定信號(hào)源的RY為常數(shù)陣。
當(dāng)運(yùn)動(dòng)平臺(tái)姿態(tài)變化,天線的接收信號(hào)不同于基準(zhǔn)姿態(tài)信號(hào),實(shí)時(shí)姿態(tài)時(shí)接收信號(hào)為:Y′(t′)=μA′S(t′)+e′(t′),其中,Y′(t)=[y1′(t′),y2′(t′),y3′(t′)]T,A′=[a1′,…,an′]為3×N矩陣,e′(t′)為隨機(jī)噪聲,μ為接收機(jī)因姿態(tài)變化形成的信號(hào)復(fù)衰減因子。3個(gè)正交電場傳感器從第n信號(hào)源接收到的信號(hào)導(dǎo)向矢量表達(dá)為:
an′=Bn′ Dn。
其中波結(jié)構(gòu)坐標(biāo)系到實(shí)時(shí)天線坐標(biāo)系的轉(zhuǎn)換矩陣

Bn'= cosφn'-sinφn'0sinφn'cosφn'0001é?êêêù?úúúcosθn'0-sinθn'010sinθn'0 cosθn'é?êêêù?úúú·



實(shí)時(shí)姿態(tài)時(shí)接收信號(hào)互相關(guān)矩陣為:

RY'= EY'(t')Y'H(t')[]=λA'ES(t')SH(t')[]A'H+σ2I=

式中,λ=μμH為衰減因子。






(3)
3參數(shù)估計(jì)算法

可得,

式中,符號(hào)vec()表示將矩陣各列組合為向量。





接收信號(hào)可以為相干信號(hào),不受多徑效應(yīng)困擾,信號(hào)總數(shù)N可以為1到無窮大,波達(dá)方向和極化狀態(tài)任意,各信號(hào)強(qiáng)弱任意。對(duì)接收電磁波環(huán)境的要求是式(3)確定的CRB為有限值;接收極化三維電(磁)信號(hào)互相關(guān)矩陣在解除接收姿態(tài)旋轉(zhuǎn)變化影響后保持平穩(wěn),即運(yùn)動(dòng)平臺(tái)測量姿態(tài)所處時(shí)、空、頻、極化域,信號(hào)二次統(tǒng)計(jì)特性不變。因此本文既可以主動(dòng)利用發(fā)射電磁波信號(hào),也可以被動(dòng)利用空間分布的廣播電磁波信號(hào)測量姿態(tài),提高了系統(tǒng)的隱蔽性。
4姿態(tài)測量具體實(shí)施步驟
姿態(tài)測量具體實(shí)施步驟如下:
① 確定運(yùn)動(dòng)平臺(tái)基準(zhǔn)姿態(tài)坐標(biāo)系與大地坐標(biāo)系轉(zhuǎn)換關(guān)系。
② 在運(yùn)動(dòng)平臺(tái)基準(zhǔn)姿態(tài)以極化敏感的電磁矢量傳感器中的3個(gè)正交電(磁)場傳感器接收電磁波信號(hào),估計(jì)三維電(磁)信號(hào)互相關(guān)矩陣。計(jì)算姿態(tài)參數(shù)估計(jì)的CRB(克拉美—羅界)是否為有限值,判斷該環(huán)境電磁波信號(hào)能否用于運(yùn)動(dòng)平臺(tái)姿態(tài)測量。
該步驟對(duì)電(磁)極化三維特征進(jìn)行學(xué)習(xí)評(píng)估,在單一接收點(diǎn)以極化敏感的電磁矢量傳感器中的3個(gè)正交電(磁)場傳感器在基準(zhǔn)姿態(tài)接收電磁波信號(hào),選取時(shí)間t中的K個(gè)采樣點(diǎn)采樣k=1,2,…,K次,計(jì)算估計(jì)值為:

③ 在運(yùn)動(dòng)平臺(tái)實(shí)時(shí)姿態(tài)以極化敏感的電磁矢量傳感器中的3個(gè)正交電(磁)場傳感器接收電磁波信號(hào),計(jì)算估計(jì)三維電(磁)信號(hào)互相關(guān)矩陣。對(duì)實(shí)時(shí)姿態(tài)和基準(zhǔn)姿態(tài)互相關(guān)矩陣RY′和RY,進(jìn)行特征植分解,根據(jù)各自特征值比例是否近似相等,初略判斷該環(huán)境電磁波信號(hào)是否平穩(wěn)。

⑤ 用步驟④得到轉(zhuǎn)換矩陣將實(shí)時(shí)姿態(tài)坐標(biāo)系下的運(yùn)動(dòng)平臺(tái)姿態(tài),轉(zhuǎn)換到基準(zhǔn)姿態(tài)坐標(biāo)系下,再轉(zhuǎn)換到地理坐標(biāo)系下,完成運(yùn)動(dòng)平臺(tái)姿態(tài)感知。
在接收機(jī)平臺(tái)實(shí)時(shí)姿態(tài)坐標(biāo)系中,平臺(tái)姿態(tài)方向向量為單位陣
根據(jù)電磁信號(hào)對(duì)稱性,可單獨(dú)利用電或磁信息測量運(yùn)動(dòng)平臺(tái)姿態(tài),也可融合電磁信息提高測量姿態(tài)精度。
5仿真實(shí)驗(yàn)
式中,p=λp0。
代入式(3)得:
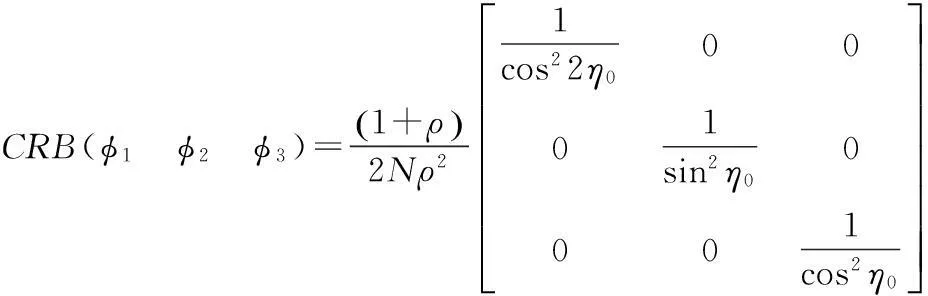
式中,ρ=p/σ2,這個(gè)結(jié)果與文獻(xiàn)[10]一致。由此式知,η0=±45°的圓極化隨機(jī)信號(hào)的CRB(φ1)=,不能用于測量姿態(tài)。
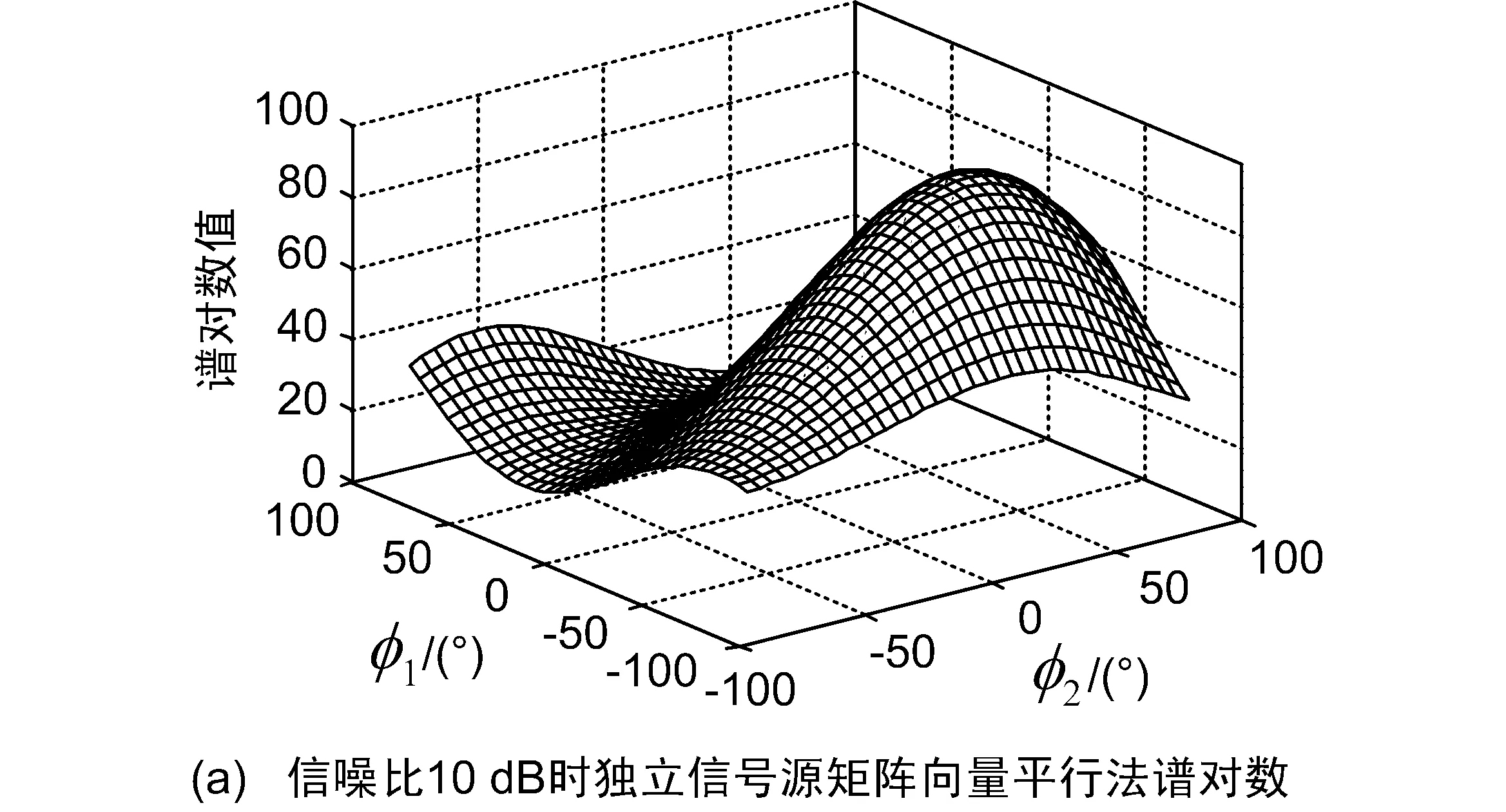
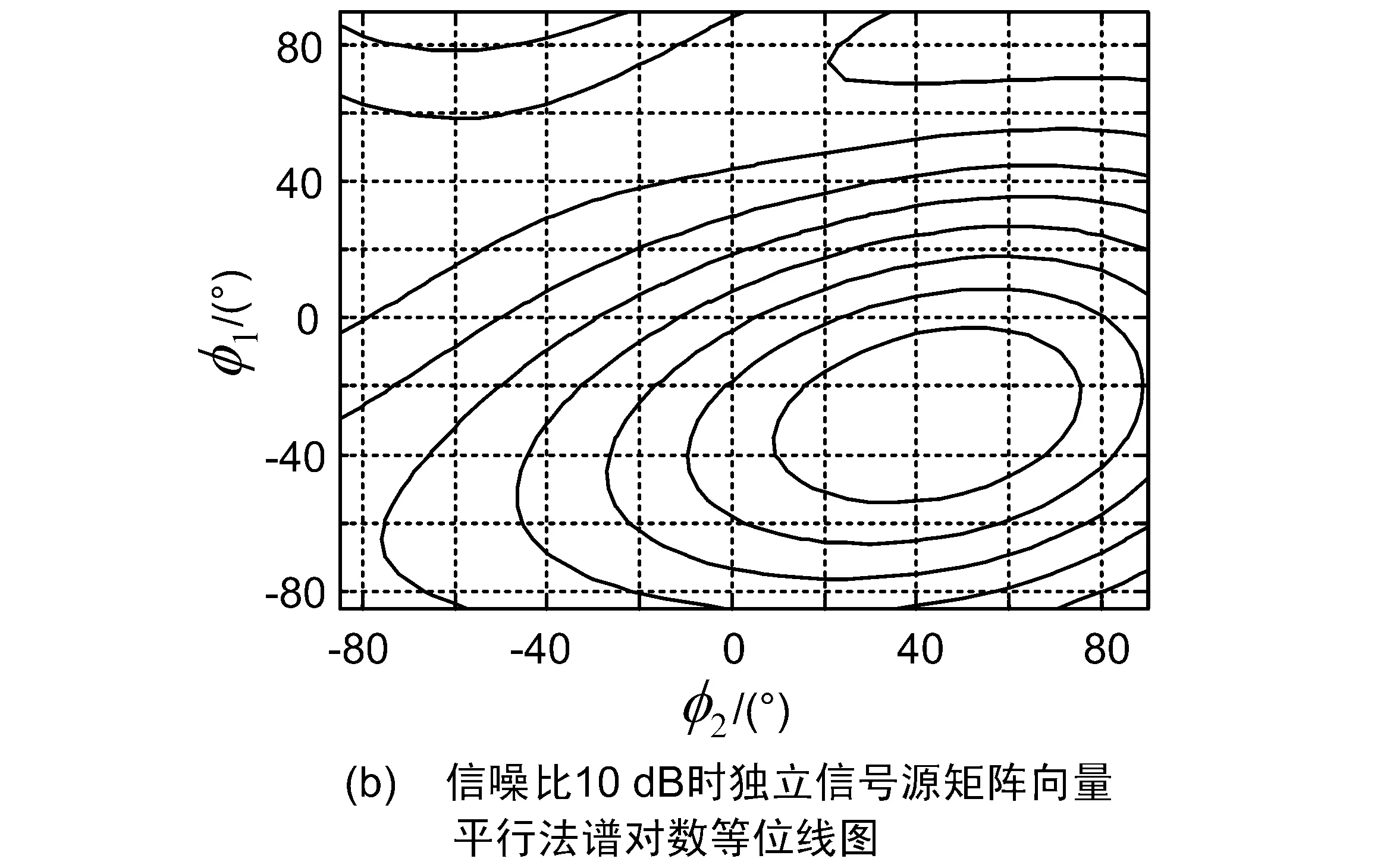
圖3 矩陣向量平行法譜對(duì)數(shù)隨φ1和φ2變化圖形
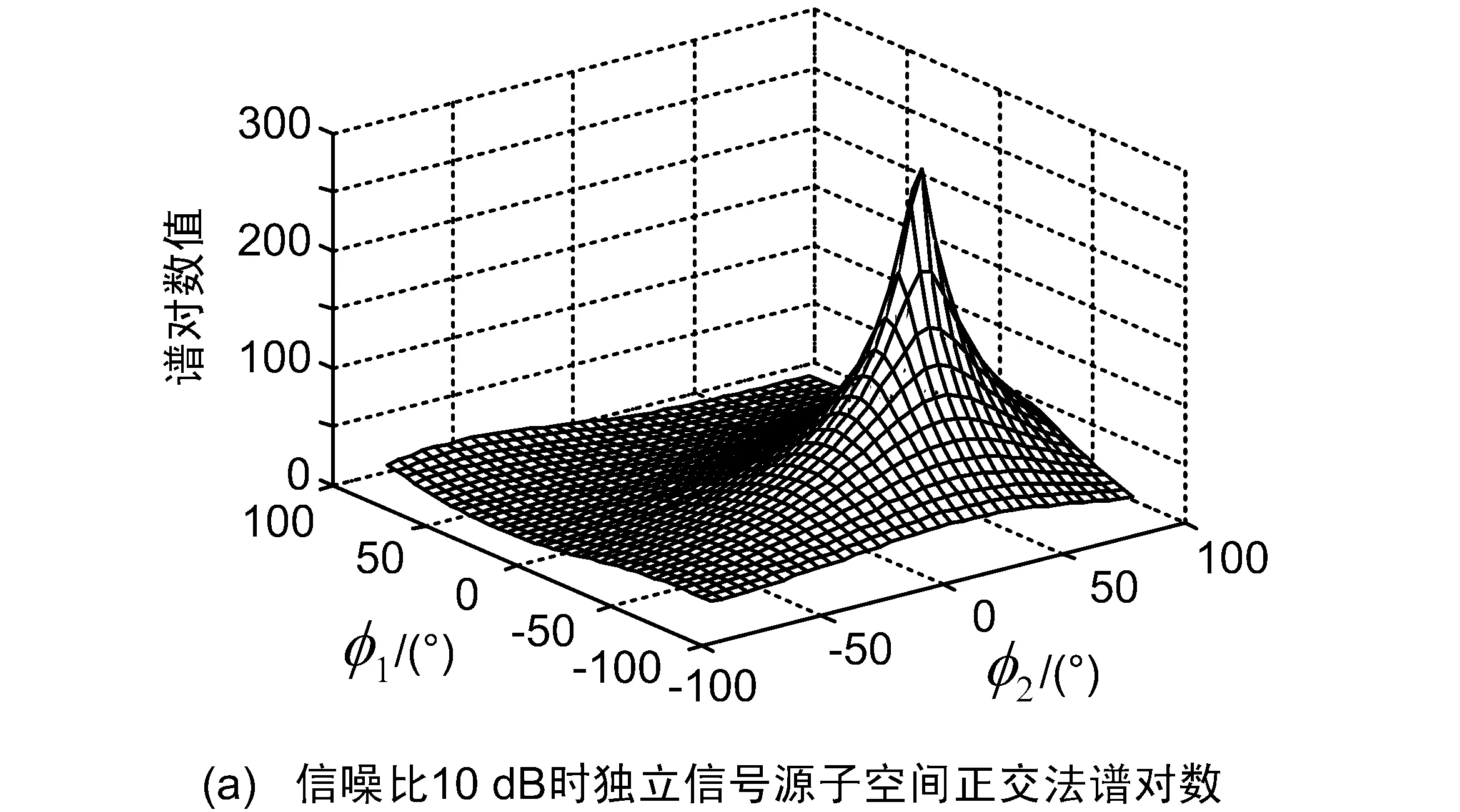
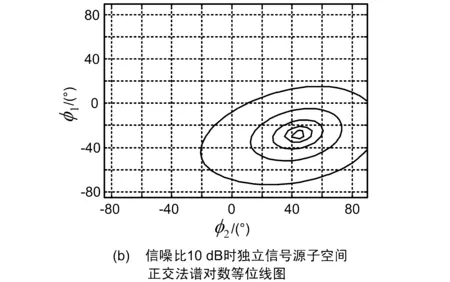
圖4 子空間正交法譜對(duì)數(shù)隨φ1和φ2變化圖形
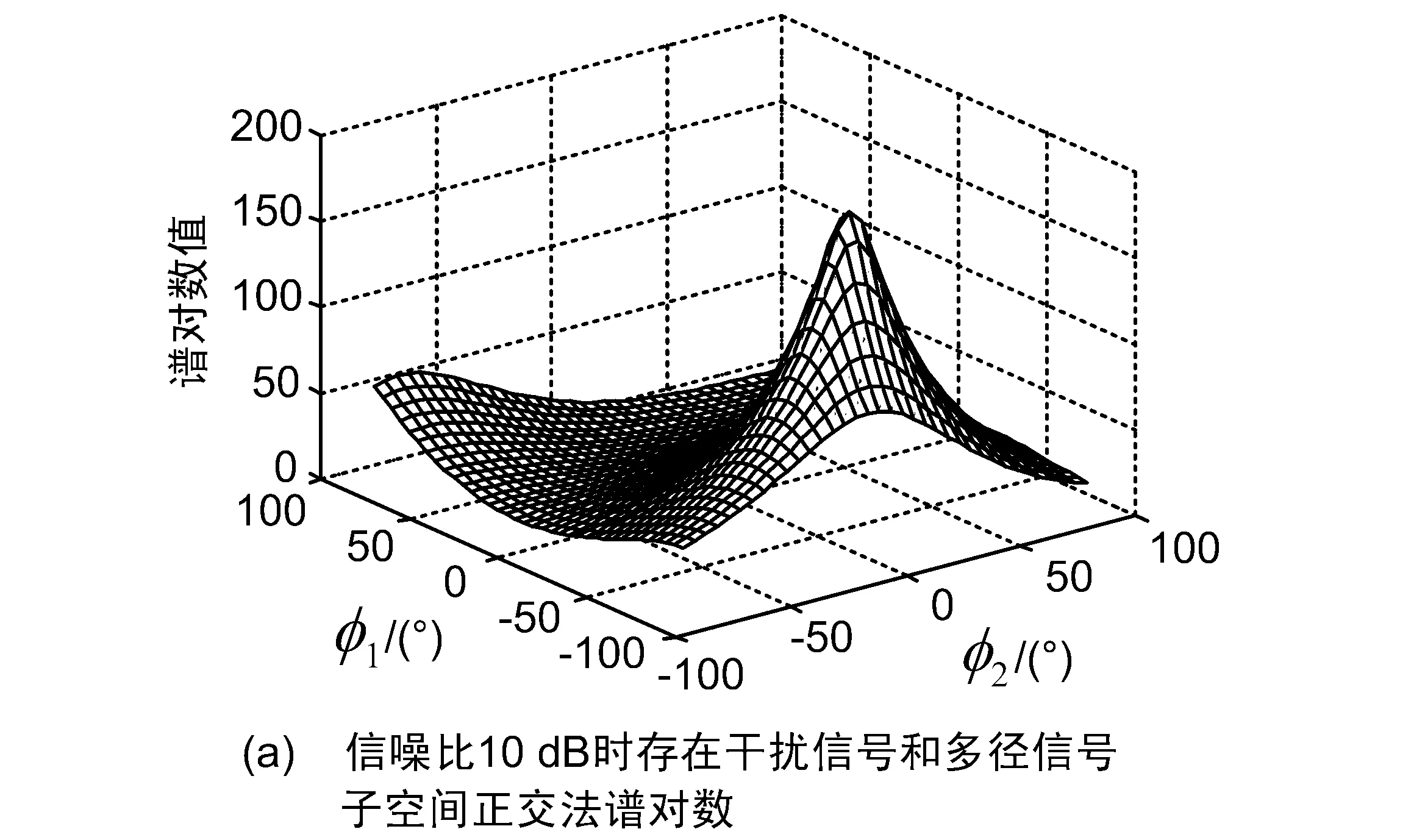
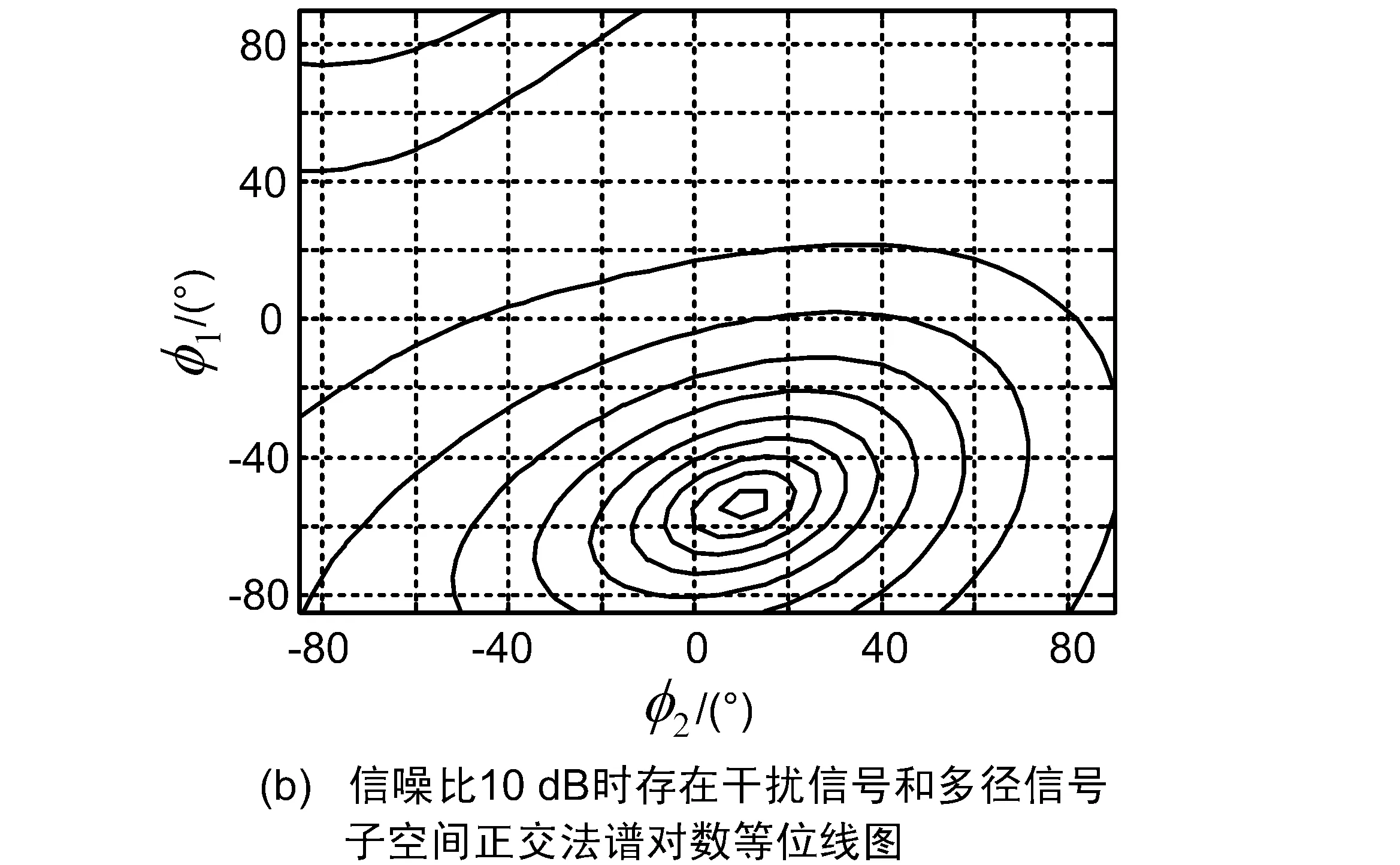
圖5 未校正基準(zhǔn)互相關(guān)矩陣子空間正交法譜對(duì)數(shù)隨φ1和φ2變化圖形
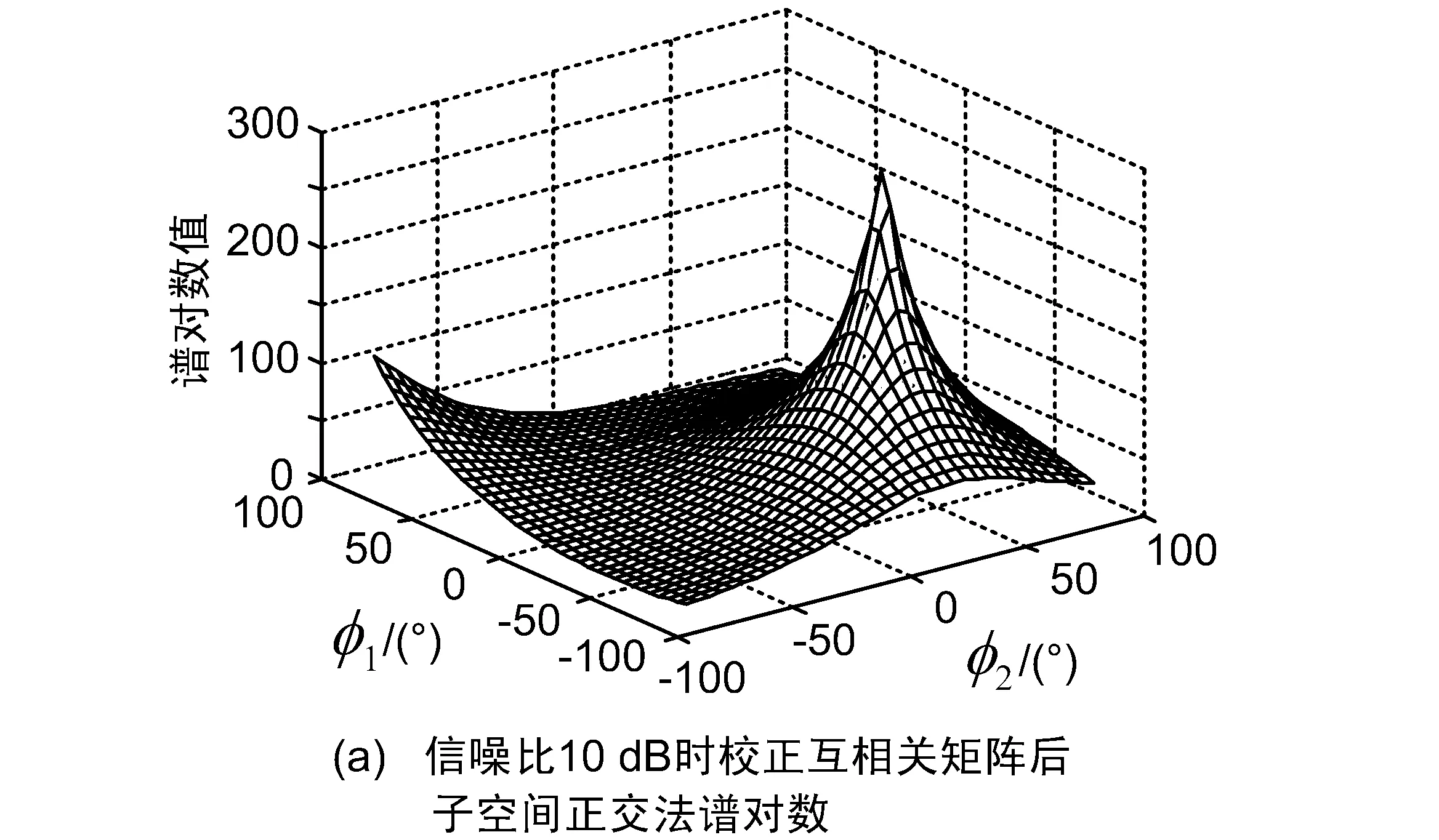
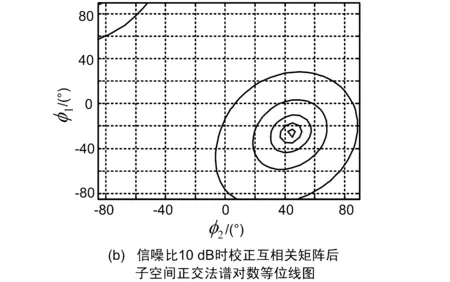
圖6 校正基準(zhǔn)互相關(guān)矩陣后子空間正交法譜對(duì)數(shù)隨φ1和φ2變化圖形
6結(jié)束語
測控技術(shù)利用電磁波時(shí)域信息測距,頻域信息測速,空域信息測方位,極化域信息卻沒有得到深入研究和利用,本文正是在這一領(lǐng)域展開探索,只需運(yùn)動(dòng)平臺(tái)上有單一接收點(diǎn),就可實(shí)現(xiàn)姿態(tài)/航向感知,系統(tǒng)可微型化,信號(hào)不受多徑效應(yīng)困擾,既可以利用主動(dòng)發(fā)射電磁波信號(hào),也可以被動(dòng)接收空間分布的廣播電磁波信號(hào)測量姿態(tài),提高了系統(tǒng)的隱蔽性。適用于空或天飛行器。
參考文獻(xiàn)
[1]CHAO A,KANG Y S.Altitude Integration of Radar Altimeter and GPS/INS for Automatic Takeoff and Landing of a UAV[C]∥KINTEX,Gyeonggi-do,Korea .11th International Conference on Control,Automation and Systems,2011:1 429-1 432.
[2] HAN S L,WANG J L.Quantization and Colored Noises Error Modeling for Inertial Sensors for GPS/INS Integration[J].IEEE SENSORS JOURNAL,2011,11(6):1 493-1 503.
[3]WANG X l,SHAOX W,GONG D R,et al.GPS/VISNAV Integrated Relative Navigation and Attitude Determination System for Ultra-close Spacecraft Formation Flying[J].Systems Engineering and Electronics,2011,22(2):283-291.
[4]GABRIELE G,PETER J G,TIM P G. Instantaneous Global Navigation Satellite System (GNSS)-Based.Attitude Determination for Maritime Applications[J].Oceanic Engineering,IEEE,2012,12(99):1-15.
[5]KIS L,LANTOS B.Aided Carrier Phase Differential GPS for Attitude Determination[C]∥ASME,IEEE International Conference on Advanced Intelligent Mechatronics (AIM),2011:778-783.
[6]ANDREW R,ABDELHAMID T.On the Attitude Estimation of Accelerating Rigid-bodies Using GPS and IMU Measurements[C]∥Orlando,FL,USA,2011 50th IEEE Conference on Decision and Control,European Control Conference (CDC-ECC),2011:8 088-8 093.
[7]吳美平,逯亮清.北斗雙星系統(tǒng)車輛定向技術(shù)[J].國防科技大學(xué)學(xué)報(bào),2006,28(3):89-93.
[8]AXELRAD P,WARD L M.Spacecraft Attitude Estimation Using the Global Positioning System:Methodology and Result for RADCAL[J].Journal of Guidance,and Dynamics,1996,19(6):1 201-1 209.
[9]NAQVI N A,Li Y J.The Quest for Optimal Spacecraft Attitude Determination Filtering Algorithm Using GNSS Phase Measurements:An Overview[C] ∥Japan,2nd International Conference on Signal Processing Systems (ICSPS),2010,V2:383-388.
[10]NEHORAI A,PALDI E.Vector-sensor Array Processing for Electromagnetic Source Location[J].IEEE Transactions on Signal Processing,1994(42):376-398.
[11] SHUSTER M.Survey of Attitude Representations[M].United States,Hopkins Univ Applied Physics Lab,1993:439-517.
[12]MARIUS P,ALEX B G.Maximum-likelihood Direction-of-Arrival Estimation in the Presence of Unknown Nonuniform Noise[J].IEEE Transactions on Signal Processing,2001,49(7):1 310-1 324.
[13]HOCHWALD B,NEHORAI A.Concentrated CramCr-Rao Bound Expressions[C]∥IEEE Trans.Inform.Theory,1994:125-142.
[14] STOICA P,NEHORAI A.Performance Study of Conditional and Unconditional Direction-of-Arrival Estimation[J].IEEE Trans.Acoust.Speech Signal Processing,1990,38(10):1 783-1 795.
[15] 陳廣東,李成珠.基于極化電磁波信息鏈的運(yùn)動(dòng)平臺(tái)感知方法[P].中國專利:201110093296.2,2011.
[16] 陳廣東.基于協(xié)同源波達(dá)信息的運(yùn)動(dòng)平臺(tái)姿態(tài)感知方法[P].中國專利: 201210483494.4,2013.
黃海行男,(1991—),碩士研究生。主要研究方向:測控信號(hào)處理。
陳廣東男,(1968—),博士,研究生導(dǎo)師,副研究員。主要研究方向:測控、雷達(dá)成像。
作者簡介
中圖分類號(hào)TN911
文獻(xiàn)標(biāo)志碼A
文章編號(hào)1003-3106(2016)04-0030-05
收稿日期:2016-01-07
doi:10.3969/j.issn.1003-3106.2016.04.08
引用格式:黃海行,陳廣東,陳智.基于信號(hào)極化三維平穩(wěn)性的飛行器姿態(tài)估計(jì)[J].無線電工程,2016,46(4):30-34,51.