光纖慣組溫度補(bǔ)償模型和測(cè)試技術(shù)研究
2016-04-13 05:26:02胡少波紀(jì)文濤
導(dǎo)彈與航天運(yùn)載技術(shù) 2016年4期
趙 龍,胡少波,紀(jì)文濤
(北京航天控制儀器研究所,北京,100039)
光纖慣組溫度補(bǔ)償模型和測(cè)試技術(shù)研究
趙 龍,胡少波,紀(jì)文濤
(北京航天控制儀器研究所,北京,100039)
光纖慣性導(dǎo)航系統(tǒng)中的光纖陀螺和石英加速度計(jì)的漂移受溫度變化影響顯著,導(dǎo)致其在導(dǎo)航系統(tǒng)中的應(yīng)用受到各種制約。現(xiàn)在工程上采用的溫控技術(shù)雖然保證了光纖陀螺工作環(huán)境溫度的穩(wěn)定,但其需要在陀螺內(nèi)增加溫控設(shè)置,并對(duì)設(shè)置的溫度控制性能提出了較高的要求,這樣必定會(huì)增加光纖陀螺的體積、質(zhì)量和成本,同時(shí)溫控精度也受到制約。提出了一種基于光纖慣性測(cè)量組合的溫度補(bǔ)償模型,并設(shè)計(jì)相應(yīng)的試驗(yàn)方法對(duì)陀螺儀和加速度計(jì)的零偏和標(biāo)度因數(shù)進(jìn)行了溫度補(bǔ)償。試驗(yàn)驗(yàn)證,提出的溫度模型準(zhǔn)確有效,有利于補(bǔ)償因溫度變化引起的加速度計(jì)和陀螺儀的零偏和標(biāo)度因數(shù)影響,達(dá)到提高慣性導(dǎo)航系統(tǒng)的導(dǎo)航精度的目的。
光纖慣性測(cè)量組合;溫度補(bǔ)償技術(shù);零偏模型;標(biāo)度因數(shù)模型
0 引 言
光纖陀螺儀是一種基于薩格奈克(Sagnac)效應(yīng)的光學(xué)陀螺儀,具有高可靠性、長(zhǎng)壽命、小體積、輕質(zhì)量、低功耗、力學(xué)環(huán)境適應(yīng)性好、動(dòng)態(tài)范圍大、線性度好、頻帶范圍寬、啟動(dòng)時(shí)間短等特點(diǎn),是新一代全固態(tài)陀螺儀的典型代表,可廣泛應(yīng)用于航天、航空、航海、兵器及多種軍民用領(lǐng)域。對(duì)于實(shí)用化的光纖慣性測(cè)量組合(以下簡(jiǎn)稱慣組),為適應(yīng)不同領(lǐng)域的應(yīng)用,一般要求其具有較寬的工作溫度范圍,系統(tǒng)實(shí)際使用時(shí)需在-40~60℃的工作溫度下,滿足過(guò)載、振動(dòng)、沖擊、濕熱等環(huán)境要求。
光纖陀螺的性能參數(shù)對(duì)環(huán)境溫度的變化很敏感,構(gòu)成光纖陀螺的核心部件對(duì)溫度較為敏感,已成為光纖陀螺邁向工程化所面臨的難題之一[1,2]。
環(huán)境溫度變化引起系統(tǒng)漂移:a)使纖芯的折射率及媒質(zhì)(包括纖芯、包層和涂敷層)的熱膨脹系數(shù)以及光纖環(huán)的面積發(fā)生變化,從而影響光在媒介中的傳輸,直接影響到對(duì)轉(zhuǎn)動(dòng)角速度檢測(cè)的標(biāo)度因數(shù)的穩(wěn)定性;b)熱輻射造成光纖環(huán)局部溫度梯度,引起非互易相移,這個(gè)非互易的相位相移將疊加在由Sagnac效應(yīng)產(chǎn)生的非互易相移中,從而影響光纖陀螺的精度[3,4]。
常用的抑制方法主要有:a)對(duì)光纖線圈進(jìn)行恒溫處理,鋁箱屏蔽隔離并進(jìn)行適當(dāng)?shù)臏囟妊a(bǔ)償;b)采用溫度系數(shù)小的光纖和被覆材料;c)采用4級(jí)對(duì)稱方法來(lái)繞制光纖環(huán),并在工藝和狀態(tài)控制上提出嚴(yán)格要求,以減少溫度變化引起的漂移[5,6]。
文中針對(duì)基于光纖慣組的陀螺和石英加速度計(jì)的零偏和標(biāo)度因數(shù)隨溫度變化的關(guān)系,提出了相應(yīng)的溫度補(bǔ)償模型,并設(shè)計(jì)了測(cè)試方法,通過(guò)試驗(yàn)得到的溫度補(bǔ)償系數(shù)對(duì)陀螺儀和加速度計(jì)進(jìn)行溫度補(bǔ)償,達(dá)到提高慣導(dǎo)系統(tǒng)導(dǎo)航精度的目的。
1 溫度補(bǔ)償模型
1.1 陀螺儀溫度誤差模型
一般測(cè)量系統(tǒng)的誤差可以分為系統(tǒng)誤差和測(cè)量誤差,據(jù)此,光纖陀螺儀的誤差模型表示為[7]

式中outω為陀螺儀輸出值;trueω為被測(cè)對(duì)象真實(shí)角速度;b為系統(tǒng)誤差或稱為常值漂移,表示陀螺儀靜態(tài)輸出值的零偏;ε為量測(cè)噪聲,近似于均值為零的高斯白噪聲,但通過(guò)濾波能被很好消除。
陀螺儀的常值漂移實(shí)際上是一個(gè)時(shí)間緩慢變化的過(guò)程,將其建模為一種由隨機(jī)游走白噪聲驅(qū)動(dòng)的漂移。這種方法比較簡(jiǎn)單,但當(dāng)環(huán)境變化時(shí)會(huì)變得不準(zhǔn)確。通過(guò)對(duì)實(shí)際零偏的分析,發(fā)現(xiàn)陀螺儀的零偏包含多種因數(shù),例如常值零偏、位置不同時(shí)的零偏、重復(fù)啟動(dòng)零偏、溫度偏移、周期性偏移以及隨機(jī)漂移等。為了簡(jiǎn)化模型,將其表示為[8]

式中0b為漂移常量值;rω為地球自轉(zhuǎn)角速度在陀螺儀測(cè)量平面上的分量;(,)t TΨ為與溫度和時(shí)間有關(guān)的漂移;tε為由速率隨機(jī)游走白噪聲驅(qū)動(dòng)引起的隨機(jī)漂移,可以被看做均值為零的白噪聲。
由式(2)所描述的陀螺儀零偏模型中,常值零偏、地球自轉(zhuǎn)引起的零偏以及與溫度和時(shí)間相關(guān)的漂移及噪聲,這幾種漂移是互不相關(guān)的,可以對(duì)其進(jìn)行獨(dú)立分析和分離。
在考慮與溫度相關(guān)的漂移時(shí),可忽略時(shí)間相關(guān)項(xiàng),因?yàn)橥勇輧x的零偏不僅僅跟溫度有關(guān),而且跟溫度的變化率有關(guān),單一的溫度變量曲線不能模擬出溫度對(duì)零偏的影響,本文提出一種不僅考慮溫度有關(guān)項(xiàng),而且考慮到溫度變化率的零偏對(duì)應(yīng)模型:

式中 T為對(duì)應(yīng)溫度;dT為溫度變化率;x1,x2,x3為誤差系數(shù)。
1.2 加速度計(jì)溫度誤差模型
加速度計(jì)溫度漂移主要由表頭結(jié)構(gòu)參數(shù)變化、封裝熱應(yīng)力和檢測(cè)電路溫度漂移造成。
檢測(cè)電路的溫度漂移就相當(dāng)于在環(huán)內(nèi)加入偏置電壓,則反饋控制系統(tǒng)引入額外的靜電反饋,通過(guò)靜電力的變化拉動(dòng)極板至新的平衡點(diǎn)位置,這就表現(xiàn)為閉環(huán)點(diǎn)位置漂移,閉環(huán)點(diǎn)位置變化使加速度計(jì)工作狀態(tài)發(fā)生變化,導(dǎo)致標(biāo)度因數(shù)溫度漂移。與溫度有關(guān)的加速度計(jì)標(biāo)度因數(shù)變化模型:

式中 y1,y2,y3為誤差系數(shù)。
對(duì)于封裝好的加速度計(jì)來(lái)說(shuō),溫度變化會(huì)影響表頭結(jié)構(gòu)參數(shù)的變化和封裝熱應(yīng)力的改變。表頭結(jié)構(gòu)參數(shù)的變化只改變反饋加速度計(jì)系數(shù)從而影響加速度計(jì)的標(biāo)度因數(shù);封裝熱應(yīng)力相當(dāng)于在敏感結(jié)構(gòu)上加入了一個(gè)額外的應(yīng)力,只改變加速度計(jì)的零偏,但不改變標(biāo)度因數(shù)。對(duì)于加速度計(jì)標(biāo)定時(shí),不需要而且也不能把這兩種影響分離出來(lái),故在測(cè)試過(guò)程中一起進(jìn)行測(cè)試。根據(jù)溫度影響的關(guān)系,本文中提出對(duì)應(yīng)的溫度對(duì)加速度計(jì)零偏影響模型如下:

式中 z1,z2,z3為誤差系數(shù)。
對(duì)應(yīng)的溫度對(duì)標(biāo)度因數(shù)的影響模型為

式中 k1,k2,k3為誤差系數(shù)。
2 溫度補(bǔ)償測(cè)試方法
2.1 電路板溫度對(duì)加速度計(jì)標(biāo)度因數(shù)的影響測(cè)試方法
在考慮電路板溫度變化對(duì)加速度計(jì)標(biāo)度因數(shù)Ka的影響時(shí),首先需要將其和加速度計(jì)本身溫度對(duì)加速度計(jì)的零偏K0和標(biāo)度因數(shù)Ka的影響隔離開(kāi)來(lái),在光纖慣組設(shè)計(jì)時(shí),由于溫度的變化對(duì)加速度計(jì)的輸出具有很大的擾動(dòng)作用,故在設(shè)計(jì)時(shí)就已經(jīng)考慮到對(duì)加速度計(jì)進(jìn)行了溫控設(shè)計(jì),以保持在使用過(guò)程中加速度計(jì)的溫度不變。在測(cè)試過(guò)程中,開(kāi)啟溫控系統(tǒng),保持加速度計(jì)的溫度不變,這樣就能有效地隔離加速度計(jì)本身溫度對(duì)加速度計(jì)的零偏K0和標(biāo)度因數(shù)Ka的影響,加速度計(jì)標(biāo)度因數(shù)Ka的變化只由電路板溫度變化引起,這樣就能標(biāo)定出電路板溫度對(duì)加速度計(jì)標(biāo)度因數(shù)Ka的影響的溫度補(bǔ)償系數(shù)。
測(cè)試方法設(shè)計(jì)如下,通過(guò)將光纖慣組固定在某個(gè)特定的位置下,通過(guò)從-25 ℃變溫到55 ℃,保持1 h,再?gòu)?5 ℃降溫到-25 ℃,完成1個(gè)循環(huán)后變換180°位置,再進(jìn)行1個(gè)相同的循環(huán),溫度測(cè)試變化曲線如圖1所示。測(cè)試過(guò)程中,打開(kāi)光纖慣組溫控系統(tǒng),保持加速度計(jì)的溫度不變,以分離加速度計(jì)和電路板在溫度變化下對(duì)加速度計(jì)標(biāo)度因數(shù)的影響。
圖1 溫度補(bǔ)償測(cè)試變溫曲線
2.2 陀螺儀溫度對(duì)陀螺儀零偏的影響測(cè)試方法
在測(cè)試陀螺儀溫度對(duì)陀螺儀零偏的影響時(shí),因?yàn)橹挥赏勇輧x本身溫度變化引起了陀螺儀零偏的變化,故在測(cè)試過(guò)程中不需要額外的控制其它變量,就能獨(dú)立測(cè)試出溫度對(duì)陀螺儀零偏的影響,標(biāo)定出陀螺儀零偏的溫度補(bǔ)償系數(shù),可以通過(guò)和上述的測(cè)試方法一并進(jìn)行測(cè)試,不再增加額外的測(cè)試。
2.3 加速度計(jì)溫度對(duì)加速度計(jì)零偏和標(biāo)度因數(shù)的影響
測(cè)試方法
在上述的測(cè)試中,已經(jīng)將電路板溫度變化對(duì)加速度計(jì)的標(biāo)度因數(shù)的溫度補(bǔ)償系數(shù)標(biāo)定出來(lái),通過(guò)將其補(bǔ)償?shù)郊铀俣扔?jì)的輸出中,可以隔離出加速度計(jì)本身溫度的變化對(duì)加速度計(jì)的零偏K0和標(biāo)度因數(shù)Ka的影響,故設(shè)計(jì)的測(cè)試方法可將加速度計(jì)溫控系統(tǒng)關(guān)閉,以保證加速度計(jì)溫度從低溫狀態(tài)到高溫狀態(tài),再?gòu)母邷貭顟B(tài)到低溫狀態(tài)的溫度變化。
測(cè)試方法為:將光纖慣組安裝在雙軸溫箱轉(zhuǎn)臺(tái)中,設(shè)置溫箱的溫度為-20℃,溫箱溫度穩(wěn)定后保持1 h。光纖慣組除溫控外其余全部通電。設(shè)置溫箱為-20 ℃,-10 ℃,0 ℃,10 ℃,20 ℃,30 ℃,40 ℃和50 ℃。溫箱各溫度點(diǎn)溫度穩(wěn)定后保持2 h后進(jìn)行連續(xù)兩次標(biāo)定測(cè)試,計(jì)算加速度計(jì)在各個(gè)溫度點(diǎn)下的零偏K0和標(biāo)度因數(shù)Ka。
3 試驗(yàn)驗(yàn)證
3.1 陀螺儀溫度補(bǔ)償
在經(jīng)過(guò)變溫測(cè)試后,采集得到對(duì)應(yīng)的6路光纖陀螺儀輸出量、加速度計(jì)輸出量、各個(gè)傳感器的溫度和電路板的溫度。
對(duì)同一組數(shù)據(jù)的陀螺儀輸出和對(duì)應(yīng)溫度進(jìn)行處理,因?yàn)橥勇輧x輸出不僅跟溫度有關(guān),還跟溫度的變化率有關(guān),所以不存在一個(gè)標(biāo)準(zhǔn)溫度值,一般采用最小二乘法擬和陀螺輸出和溫度與溫度變化率的關(guān)系,通過(guò)減去擬合后得到陀螺輸出平均值,就得到對(duì)應(yīng)溫度零偏補(bǔ)償系數(shù)。同樣每一個(gè)陀螺儀獲得6個(gè)參數(shù),共得到18個(gè)參數(shù)。陀螺儀輸出隨溫度變化的補(bǔ)償前曲線和補(bǔ)償后曲線如圖2所示。
圖2 陀螺儀輸出隨溫度變化的補(bǔ)償前曲線和補(bǔ)償后曲線
從圖2可以看出在經(jīng)過(guò)補(bǔ)償后,隨著溫度變化陀螺儀輸出幾乎不變,與未補(bǔ)償?shù)耐勇輧x輸出相比,明顯變得更為平滑,陀螺儀輸出的精度從未補(bǔ)償前1 (°)/h的變?yōu)?.1 (°)/h ,提高了1個(gè)數(shù)量級(jí),說(shuō)明建立的陀螺儀溫度補(bǔ)償模型真實(shí)反映了陀螺儀的溫度影響關(guān)系,可以達(dá)到提高慣組精度的效果。
3.2 加速度計(jì)溫度補(bǔ)償
3.2.1 電路板溫度對(duì)加速度標(biāo)度因數(shù)的影響
分析溫度變化導(dǎo)致電路板對(duì)加速度計(jì)標(biāo)度因數(shù)的影響,這里將電路板的正常工作溫度,即光纖慣組標(biāo)定測(cè)試時(shí)的溫度作為加速度計(jì)輸出的標(biāo)準(zhǔn)值。加速度計(jì)輸出的標(biāo)準(zhǔn)值和在不同溫度下的加速度計(jì)輸出的比值反映了電路板溫度變化對(duì)加速度計(jì)的標(biāo)度因數(shù)的變化關(guān)系。通過(guò)二次項(xiàng)系數(shù)擬合法擬合對(duì)應(yīng)曲線,得到對(duì)應(yīng)的3個(gè)參數(shù)值,因包含6個(gè)加速度計(jì),故總系數(shù)有18個(gè)。
加速度計(jì)標(biāo)度因數(shù)Ka值隨溫度變化的真實(shí)曲線和擬合曲線如圖3所示。
圖3 電路板溫度和加速度計(jì)Ka變化的關(guān)系曲線
將計(jì)算得到的系數(shù),通過(guò)溫度補(bǔ)償模型補(bǔ)償?shù)綄?duì)應(yīng)的加速度計(jì)輸出時(shí),補(bǔ)償后的輸出曲線和未補(bǔ)償后的輸出曲線如圖4所示。
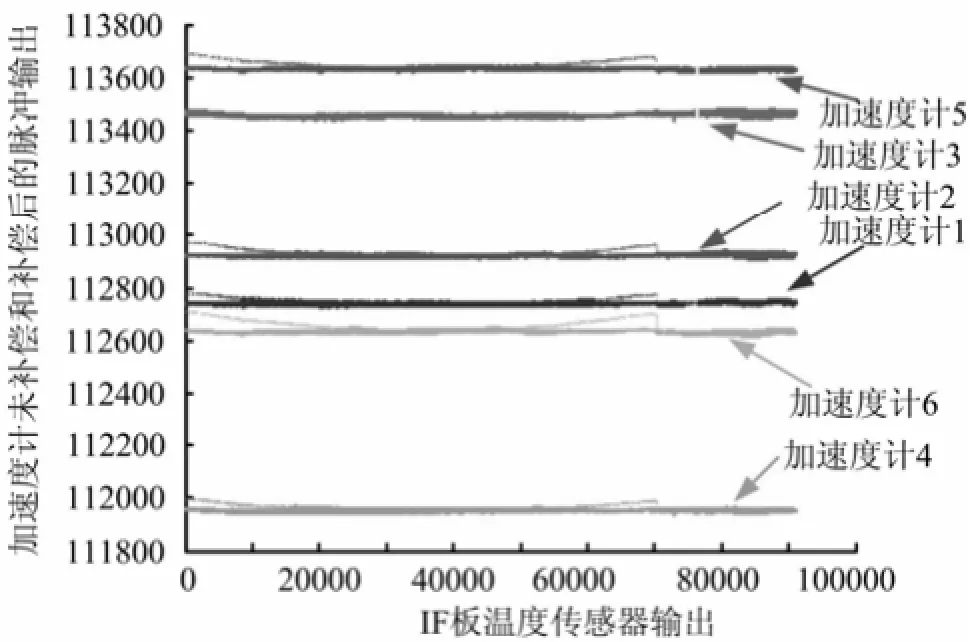
圖4 電路板溫度和加速度計(jì)未補(bǔ)償和補(bǔ)償后輸出的關(guān)系曲線
從圖4可以看出,補(bǔ)償后隨著溫度變化,加速度計(jì)輸出基本不變,與未補(bǔ)償結(jié)果形成明顯差別。輸出數(shù)據(jù)的均方差從未補(bǔ)償前的變化為補(bǔ)償后的,加速度計(jì)的輸出精度提高了1個(gè)數(shù)量級(jí),說(shuō)明建立的溫度補(bǔ)償模型有效,能夠反映出電路板溫度變化對(duì)加速度計(jì)標(biāo)度因數(shù)的影響。
3.2.2 加速度計(jì)溫度對(duì)加速度標(biāo)度因數(shù)的影響
通過(guò)全溫度閾標(biāo)定測(cè)試后,對(duì)各個(gè)溫度點(diǎn)下得到的加速度信息進(jìn)行數(shù)據(jù)解算,得到不同溫度下的加速度計(jì)零偏和標(biāo)度因數(shù),通過(guò)二次項(xiàng)擬合方法擬合加速度計(jì)零偏和標(biāo)度因數(shù)隨溫度變化曲線關(guān)系圖如圖5和圖6所示。
綜合補(bǔ)償后得到的加速度計(jì)輸出如圖7所示。
經(jīng)過(guò)綜合補(bǔ)償后,光纖慣組的測(cè)試精度得到了較大程度的改善,加速度計(jì)和陀螺儀精度提高了1個(gè)數(shù)量級(jí),說(shuō)明建立的補(bǔ)償模型正確反映了光纖慣組的溫
度誤差特性,具有較好的適用性。不同溫度下的補(bǔ)償效果也不相同,溫度越高,補(bǔ)償效果越明顯,因?yàn)殡S著溫度的升高光纖陀螺和石英加速度計(jì)的漂移增大,相對(duì)于低溫段來(lái)說(shuō),高溫段的補(bǔ)償效果更為明顯。
Research on Temperature Compensation Model and Test Technology of Optical Fiber Inertial Measurement Unit
Zhao Long, Hu Shao-bo, Ji Wen-tao
(Beijing Aerospace Control Device Institute, Beijing, 100039)
The drift of fog and quartz accelerometer in fog Inertial Measurement Unit (IMU) is significantly influence by the temperature, leading that its application in navigation system is limited. The temperature control technology used in engineering is the temperature stability guarantee of the fiber optic gyro, but it needs to add temperature control in the gyroscope, and put forward higher requirements for setting temperature control performance. This will denfinitely increase the volume, quality and cost of the fog, meanwhile the temperature control accuracy is also restricted. In this paper, a temperature compensation model based on optical fiber is proposed and the corresponding experimental method is designed. The temperature compensation of the zero deviation and scaling factor of the gyroscope and accelerometer is compensated. The temperature model is accurate and effective and beneficial for compensation the accelerometer and gyroscope zero bias and scale factor caused by the temperature change. The purpose of improving the navigation accuracy of the inertial navigation system is achieved.
Optical fiber IMU; Temperature compensation technology; Zero bias model; Scaling factor model
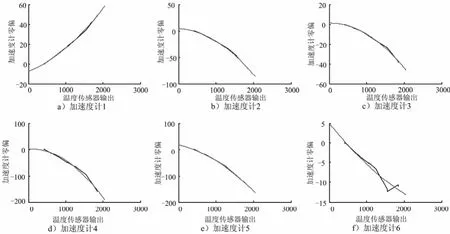
圖5 加速度計(jì)零偏真實(shí)值和擬合值

圖6 加速度計(jì)標(biāo)度因數(shù)真實(shí)值和擬合值
V448.22
A
1004-7182(2016)04-0039-06
10.7654/j.issn.1004-7182.20160410
2015-07-10;修改日期:2016-02-20
趙 龍(1988-),男,工程師,主要研究方向?yàn)閼T性導(dǎo)航算法研究