通用高速飛行器預測校正再入制導方法研究
2016-04-13 05:26:01宋劍爽
導彈與航天運載技術 2016年4期
關鍵詞:方法
宋劍爽,胡 鈺,洪 蓓,熊 偉,王 智
(北京宇航系統工程研究所,北京,100076)
通用高速飛行器預測校正再入制導方法研究
宋劍爽,胡 鈺,洪 蓓,熊 偉,王 智
(北京宇航系統工程研究所,北京,100076)
給出一種適合通用高速飛行器(CAV)的預測校正再入制導方法。首先基于再入高速飛行器三自由度運動模型,研究了再入過程中CAV受到的過程約束。基于準平衡滑翔條件給出了在指定傾側角下的參考航程的計算方法,并指出當飛行器的初始航程超過參考航程時,可以使用本文給出的方法有效抑制飛行器軌跡在高度上的振蕩。為了提高制導精度,不僅給出了精確計算當前傾側角的方法,也給出了粗略調整終端傾側角方法。最后仿真驗證了制導方法的有效性。
通用高速飛行器;準平衡滑翔條件;航程預測;預測校正制導
0 引 言
通用高速飛行器(Common Aero Vehicle,CAV)具有較大的升阻比,可以在大氣層內進行長距離無動力滑翔飛行,實現遠程快速打擊。盡管HTV-2已經進行了2次試飛,但是再入制導依然存在很多挑戰,如何獲得有效的最優彈道剖面是再入制導研究的熱點。高速飛行器再入飛行制導方法一般分為標準軌道制導方法和在線預測校正制導方法。標準軌道制導方法制導需要設計控制器跟蹤離線設計的標準軌跡,雖然所用導引率簡單,但是攻角需要跟隨跟蹤控制率圍繞參考剖面進行小范圍調節[1,2]。隨著機載計算機技術的發展,在線預測校正制導方法逐漸成為了一種有效的制導方式。
傳統的在線預測校正制導方法首先需要根據航程設定好攻角剖面,這樣就可以通過調整傾側角的大小和符號實現對飛行器的精確制導。但是基于這種方法容易產生一個高度方向上強烈振蕩的彈道,給飛行器控制器設計帶來很大挑戰。文獻[3]給出了一種基于準平衡滑翔條件(Quasi Equilibrium Gliding Conditions,QEGC)抑制軌道振蕩的方法,但是仿真發現這種抑制效果僅僅在某個特定航程范圍內有效。
本文給出了一種適合再入高速飛行器的在線預測校正制導方法。為了方便對飛行器航程進行估計,基于QEGC提出一種評估CAV航程的方法。當CAV的初始航程在指定航程附近時,可以使用本文給出的方法有效抑制飛行器軌跡在高度方向上的振蕩。由于落點精度的要求,CAV飛行對再入終端的傾側角約束較弱,而對終端位置約束要求較高。當CAV靠近目標點時,CAV剩余航程隨時間變化的速率需要有針對性的調整,并放寬準平衡滑翔約束,使CAV具有更大的機動空間,從而減小終端制導誤差。
1 制導模型及約束
1.1 再入高速飛行器運動模型
考慮地球自轉的再入高速飛行器三自由度運動模型為[3]


式中 r為飛行器到地心的距離;θ 和φ 分別為飛行器當前所處的經度和緯度;V為飛行器相對于地球的速度;γ 和ψ 分別為航跡角和航向角;σ 為傾側角;?為地球自轉角速度。為了計算方便,仿真時間可以使用tscale=進行無量綱化處理,仿真中用到的長度可以使用地球半徑R0進行無量綱化處理,而無量綱化的速度為整個制導模型的控制輸入。

其中,g0= 9.81 m/s2,R0= 6 378 135 m。無量綱化的升力、阻力的表現形式分別為[4]

式中 M為飛行器的質量;ρ 為飛行器所處的大氣密度;Aref為飛行器的參考面積;CL和CD分別為飛行器的升力系數和阻力系數。
飛行器剩余航程s無量綱化的表現形式為

圖1 最大升阻比曲線以及其對應的攻角剖面

式中 φf和θf分別為終端經度和終端緯度。忽略航向誤差,剩余航程對時間的導數為

當時間在仿真中不是一個必需的變量時,1個類能量的變量e在仿真中可以被用來作為1個獨立變量使用,表達式為
1.2 制導約束
CAV再入過程中受到的約束分為過程約束和終端約束。過程約束主要有熱流約束maxQ˙,過載約束nmax,動壓約束qmax和準平衡滑翔約束[6,7],這些約束的表達式為

當地球自轉變量被忽略時,e的導數可以表示為

由于D和V均為正值,式(12)是一個大于零的量,此時e是恒增量。
式(1)~(6)和式(9)就是制導過程中需要的仿真模型。使用文獻[5]中的氣動模型進行了驗證,本文給出的制導方法的有效性。圖1給出了最大升阻比剖面以及其對應的攻角剖面。此時傾側角和攻角就是
式中 kQ= 9.4369×10-5。
根據QEGC,γ和γ˙都是小量,忽略地球自轉可以得到新的過程約束:

給出1個速度值,通過式(14)~式(16)可以獲得對應的高度值,當給出一系列速度值時就可以繪制出3條曲線。當1個滿足準平衡滑翔條件的動常值傾側角σQEGC給出時,基于不等式(17)可以獲得1條新的曲線。式(14)~式(16)是CAV再入過程中必須滿足的條件,而式(17)是一個軟約束,因此這個不等式僅僅是一個參考約束。
CAV常見的終端約束主要有飛行器終端的高度、速度和位置滿足終端要求,用下式來表示:

基于QEGC并忽略地球自轉的影響,式(5)可以簡化為

或者

2 預測制導
分析式(1)~式(6)和式(10)不難發現當忽略地球自轉因素影響時,式(1)、式(4)、式(5)和式(11)可以作為縱向制導模型仿真。由于在縱向制導模型中,時間不是必需的變量,可以使用e代替;當速度V被用到時可以使用V=代替;則新的縱向制導模型為
由于QEGC,在CAV滑翔再入制導開始時γ 的值為小量,則傾側角可以表示為能量e的線性函數形式:

當初始時刻σf給出時,縱向預測制導就變成獲取當前的傾側角σcur的單變量的非線性函數求解問題,即適時獲得σcur使得下式成立:

式中 Δserror為允許最小誤差。
預測制導校正算法就是使用當前的傾側角剖面通過從當前的系統狀態定積分式(21)~式(23)到e=ef*;當s()≠時,可以基于割線法獲得新的σcur:

2.1 橫側向制導
橫側向制導率的設計是適時地給出傾側角的符號,即設定傾側角的反轉邏輯。限制航向角跟蹤視線角的誤差可有效地實現對制導橫程的控制。假設當前的經度、緯度分別為θ 和φ,則此時飛行器和目標的視線角為

定義航向角的偏差ΔΨ = ψ -Ψ,其中,ψ 為航向角,Ψ 為視線角。圖2為航向角誤差邊界,當航向角偏差的絕對值超過了圖2中所示的邊界值時,傾側角的符號改變;當航向角誤差絕對值不大于誤差邊界時,傾側角的符號保持不變。
圖2 航向角誤差邊界
2.2 軌跡修正
由式(1)可知當航跡角出現輕微波動時會使高度出現很大波動,但是這種波動對飛行器的控制影響很大,需要采用措施抑制。當飛行器滑翔過程中航跡角保持不變或者微量變化時,能有效抑制高度的波動,即需要保證0γ=˙。由式(5)可知調整Lcosσ 的值可以實現對γ˙的有效控制[3]:

式中 σbase為預測得到的傾側角;σnew為新的傾側角;h˙為當前的高度變化率;refr˙為參考速度變化率;rk˙為增益。當高度的變化率大于參考值時,其根本原因是航跡角大于參考值引起的,這樣可以減小式(5)中的Lcosσbase值來實現對γ˙變化的抑制。
由式(1)可知:

式中 γQEGC為滿足準平衡滑翔條件的動常值航跡角。設定式(20)中σ = σQEGC,假設瞬時升力系數CL不隨時間變化,對式(20)求導可以得到:
由于制導過程中無量綱的1r≈,式(30)可以進一步簡化得到:


把式(31)代入式(29)可以得到高度變化速率的參考值。為了實現對再入軌跡的調整,這里設置rk˙為能量e的表達式:式中 k0= 20;k1= 0~0.5k0。當靠近制導終點時,為了獲得精確的預測值本文修正終端選為e2,這樣當能量大于e2時直接使用預測得到的傾側角值,從而保證終端誤差在允許范圍內。
仿真發現僅通過上面給出的方法很難實現對再入軌跡跳變的抑制,原因在于初始航程設置與σQEGC設置不匹配。假設0γ=˙,則式(21)中的cosγ 可由式(19)得到:

此時,式(21)變為

可通過式(20)獲得QEGC的參考飛行軌跡的高度-速度剖面。設定式(33)中的σ = σQEGC,利用參考高度-速度剖面獲得參考航程Δsref。這里獲得的Δsref僅是一個參考量,實際應用中初始航程設置應該略大于這個值。
2.3 終端制導參數修正
飛行器接近終點僅僅調整當前的傾側角無法滿足制導精度時,可以通過調整σf提高制導精度。當預測得到的最小z(σ0, σf)無法滿足式(25)時,假設ds/de隨能量e呈現線性變化的趨勢。則新的σf可以使用下式計算得到

式中 (CL/CD)f為終端飛行器的升阻比;σfcmd為式(24)中新的σf。
3 仿真分析
不同于標準軌道制導方法制導,當飛行器的氣動參數出現誤差使飛行器軌跡出現偏差時,在線預測校正制導法能通過對下一時刻的傾側角大小和符號預測過程中抵消這種偏差帶來的影響。下面在不同航程下使用本文給出的制導方法進行仿真[5]。
本文選用的制導初始條件:高度為60 km,速度為7.01 km/s,經度、緯度為 (0°, 0°),航跡角為-0.05°,航向角為57.48°。設定制導終端的高度和速度大小分別為28 km和2 km/s,設定σQEGC= 15°;可以計算得到此時無量綱下的參考航程為Δsref= 2.416 2。
為了驗證本文給出的制導方法的正確性,表1給出了2個制導終端(彈道1和彈道2)的經度、緯度。
表1 制導終端經度、緯度約束及其對應的初始航程
圖3為彈道1速度-高度剖面,圖4為彈道2速度-高度剖面示意。由于彈道1的初始航程小于參考航程,由圖3的仿真結果中發現使用本文給出的彈道修正方法對彈道1振蕩的抑制作用很小。
圖3 彈道1速度-高度剖面示意
圖4 所示彈道的初始航程大于參考航程,在保證過程約束和終端約束的前提下,本文給出的彈道修正方法能有效抑制振蕩。
圖4 彈道2速度-高度剖面示意
4 結束語
本文提出了一種針對CAV的在線預測校正制導方法,該方法以在線實時調整當前傾側角的值和符號為主要控制手段,并通過預測初始航程使本文給出的彈道修正方法能有效抑制彈道在高度上的振蕩。此外,為了減小預測誤差以及初始設定的終端傾側角值對飛行器終端約束的影響,給出了一種有效調整終端傾側角的方法,從而進一步減小了終端預測誤差。最終通過仿真驗證了制導方法的有效性。
[1] Harpold J C, Graves C A. Shuttle entry guidance[J]. Journal of Astronautical Sciences, 1979,37(3): 239-268.
[2] Harpold J C, Gavert D E. Space shuttle entry guidance performance results[J]. Journal of Guidance, Control, and Dynamics, 1983(6): 442-447.
[3] Lu P. Entry guidance: a unified method[J]. Journal of Guidance, Control, and Dynamics, 2014,37(3): 713-728.
[4] 梁子璇, 任章. 基于在線氣動參數修正的預測制導方法[J]. 北京航空航天大學學報, 2013,39(7): 853-857.
[5] Phillips T. A common aero vehicle (CAV) model, description, and employment guide[M]. Schafer Corporation for Air Force Research Laboratory and Air Force Space Command, 2003.
[6] Shen, Z, Lu P. Onboard generation of three-dimensional constrained entry trajectories[J]. Journal of Guidance, control, and Dynamics, 2003,26(1): 111-121.
[7] Xue S, Lu P. Constrained predictor-corrector entry guidance[J]. Journal of Guidance, Control, and Dynamics, 2010,33(4): 1273-1281.
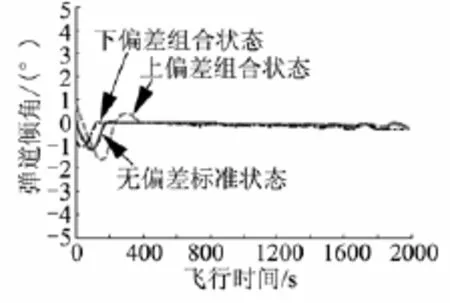
圖8 不同組合偏差工況下彈道傾角隨飛行時間變化關系
由圖7、圖8及表2可知,模糊邏輯控制律魯棒性較好,能夠滿足各種偏差工況下的高精度擬平衡飛行要求,始終將彈道傾角控制在0°附近。
5 結束語
本文針對模糊邏輯以及遺傳算法的特點,將定性分析和定量優化進行集成,采用遺傳算法對模糊邏輯控制器進行離線優化處理后,即可用于擬平衡飛行的在線控制,其控制律形式簡單,具有最優控制性能,對于各種偏差或干擾工況的魯棒性較好、智能化程度較高。通過設計不同的性能指標函數,可以實現不同的控制功能,具有一定的適用范圍。后續將采用更加貼近實際的精確彈道計算模型對提出的模糊邏輯控制律進行仿真驗證,同時進一步研究將模糊邏輯控制律用于橫向機動的可行性,為解決再入飛行控制提供了新思路。
參 考 文 獻
[1] 劉欣. 滑翔式飛行器再入彈道設計[J]. 彈箭與制導學報, 2011, 31(6): 161-162.
[2] 盧寶剛. 基于擬平衡滑翔的數值預測再入軌跡規劃算法[J]. 哈爾濱工業大學學報, 2015, 47(1): 14-15.
[3] 朱凱. 滑翔導彈再入制導與控制方法研究[D]. 哈爾濱: 哈爾濱工業大學, 2011.
[4] 周銳. 基于進化策略的導彈模糊制導律設計[J]. 宇航學報, 2004, 25(4): 449-451.
[5] 阮春榮. 大氣中飛行的最優軌跡[M]. 北京: 宇航出版社, 1987.
[6] 楊炳尉. 標準大氣參數的公式表示[J]. 宇航學報, 1983, (1): 83-86.
[7] 薛定宇. 控制系統計算機輔助設計—MATLAB語言與應用[M]. 北京:清華大學出版社, 2006.
[8] Choi D H, Oh S Y. A new mutation rule for evolutionary programming motivated from backproagation learning[J]. IEEE Transactions on Evolutionary Computation, 2000, 4(2): 188-190.
[9] Phillips T H. A common aero vehicle (CAV) model, description, and employment Guide[R]. Schafer Corporation, 2003.
Predictor-corrector Guidance for Common Aero Vehicle
Song Jian-shuang, Hu Yu, Hong Bei, Xiong Wei, Wang Zhi
(Beijing Institute of Astronautical Systems Engineering, Beijing, 100076)
In this paper, a predictor-corrector guidance method for Common Aero Vehicle (CAV) is presented. First of all, the path constraints of reentry guidance is presented based on the three-dimensional equations of motion of a gliding vehicle. Then, a method of calculating initial reference range is proposed on the base of the quasi-equilibrium glide condition. If the reference range is exceeded by the initial range, the fluctuations of height will be suppressed by use of the guidance method proposed. The algorithm of calculating the value of current bank angle and terminal bank angle is proposed. The simulation is used to validate the guidance method in the last.
Common aero vehicle; Quasi-equilibrium glide condition; Prediction of flight range; Predictor-corrector guidance
TJ765.1
A
1004-7182(2016)04-0034-05
10.7654/j.issn.1004-7182.20160409
2015-10-13;修改日期:2016-02-23
宋劍爽(1983-),男,博士,工程師,主要研究方向為軌道設計、制導設計
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56