主動前輪轉(zhuǎn)向系統(tǒng)與防抱死制動系統(tǒng)協(xié)調(diào)控制
2016-04-11 00:57:10李強(qiáng)李晗付景順
汽車實用技術(shù) 2016年2期
李強(qiáng),李晗,付景順
(沈陽工業(yè)大學(xué),遼寧 沈陽 110870)
?
主動前輪轉(zhuǎn)向系統(tǒng)與防抱死制動系統(tǒng)協(xié)調(diào)控制
李強(qiáng),李晗,付景順
(沈陽工業(yè)大學(xué),遼寧 沈陽 110870)
摘 要:針對汽車轉(zhuǎn)向制動工況,研究汽車主動前輪轉(zhuǎn)向系統(tǒng)(AFS)和防抱死制動系統(tǒng)(ABS)的協(xié)調(diào)控制;建立七自由度整車模型、前輪主動轉(zhuǎn)向系統(tǒng)模型、防抱死制動系統(tǒng)模型以及輪胎模型,設(shè)計了轉(zhuǎn)向系統(tǒng)控制器和制動系統(tǒng)控制器,以及兩子系統(tǒng)的協(xié)調(diào)控制器,并對提出的控制策略進(jìn)行了仿真分析和對比驗證。仿真結(jié)果表明:在轉(zhuǎn)向制動工況下,與獨立控制系統(tǒng)相比較,協(xié)調(diào)控制系統(tǒng)能夠在保持車輛制動穩(wěn)定性的同時縮短制動距離,充分發(fā)揮兩子系統(tǒng)的優(yōu)勢,進(jìn)一步了提高汽車的操縱性和安全性。
關(guān)鍵詞:主動前輪轉(zhuǎn)向系統(tǒng);防抱死制動系統(tǒng);協(xié)調(diào)控制
10.16638/j.cnki.1671-7988.2016.02.039
CLC NO.: U463.4 Document Code: A Article ID: 1671-7988(2016)02-106-03
引言
自汽車問世以來,汽車逐漸成為了重要的交通工具,極大的提高了人們的生活質(zhì)量,然而汽車保有量的增加也伴隨著交通事故的頻頻發(fā)生,據(jù)相關(guān)調(diào)查顯示,三分之一以上的交通事故是由于轉(zhuǎn)向制動不良造成[1]。人們越來越重視汽車的安全性和穩(wěn)定性,提高制動安全性和轉(zhuǎn)向穩(wěn)定性已成為當(dāng)今汽車技術(shù)研究的重要議題。防抱死制動系統(tǒng)的應(yīng)用有效地改善了車輪抱死引起的不安全隱患,目前廣泛應(yīng)用的是邏輯門限值控制方法。與此同時,主動前輪轉(zhuǎn)向系統(tǒng)能夠通過主動調(diào)節(jié)前輪轉(zhuǎn)角和轉(zhuǎn)向力矩,實現(xiàn)低速狀態(tài)下轉(zhuǎn)向靈活輕便,高速狀態(tài)下轉(zhuǎn)向穩(wěn)定安全[2]。
在轉(zhuǎn)向制動工況下,方向穩(wěn)定性和制動性能是評價汽車控制性能的兩個重要指標(biāo)。但是兩者是相互制約、相互影響的,短的制動距離和方向穩(wěn)定性之間存在著一定的矛盾。因此本文針對轉(zhuǎn)向制動工況,研究AFS和 ABS的協(xié)調(diào)控制,在方向穩(wěn)定性和制動性能之間權(quán)衡找到平衡點,實現(xiàn)在保證方向穩(wěn)定性的同時提高制動效能。
1、汽車仿真模型
1.1 車輛動力學(xué)模型
為了對車輛制動和轉(zhuǎn)向性能進(jìn)行研究,建立多自由度車輛模型,考慮到減小求解時間和降低仿真模型的復(fù)雜程度,因此忽略垂向運動和轉(zhuǎn)向系的間隙,建立7自由度整車模型[3]。如圖1所示,七個自由度分別為:縱向位移、側(cè)向位移、橫擺角位移和四個車輪的旋轉(zhuǎn)自由度。

圖1 七自由度整車模型
動力學(xué)方程如下:
縱向運動:

橫向運動:

橫擺運動:

式中:
M:車輛總質(zhì)量;
μ、ν、γ:車輛坐標(biāo)系下的縱向、側(cè)向、橫擺角速度;
a、b:前后軸到質(zhì)心的距離;d:輪距;
i:四個車輪,i=1~4;
Fxi、Fyi :四個輪胎分別輸出的縱向力和側(cè)向力;
δ(i):各個車輪的側(cè)偏角,即車輪與車輛坐標(biāo)系X軸的夾角。
1.2 輪胎模型
輪胎模型多種多樣,其中GIM模型計算速度快、不需要試驗數(shù)據(jù)擬合、工況適應(yīng)性強(qiáng),故本文選用GIM模型[4]。
輪胎側(cè)偏角計算公式:

輪胎與地面之間的縱向力FX:

輪胎與地面之間的橫向力Fy:

式中:
縱向滑移率:Ss=(vx-vc)vx
橫向滑移率:Sα=|tanα|
綜合滑移率:ssα=Ss2+Sα2
VX、VC:車輪的圓周速度、縱向速度;
:地面附著系數(shù);:車輪垂向載荷;
:輪胎縱向剛度、側(cè)向剛度。
1.3 主動前輪轉(zhuǎn)向器模型
以機(jī)械式疊加主動轉(zhuǎn)向系統(tǒng)作為研究對象,如圖2所示,前輪轉(zhuǎn)角有兩部分組成,一部分是駕駛員給定的轉(zhuǎn)向角,另一部分是主動轉(zhuǎn)向系統(tǒng)附加的轉(zhuǎn)向角。傳感器將檢測測出的行駛工況信號包括車速、橫擺角速度和方向盤轉(zhuǎn)角,傳遞給控制器,控制器根據(jù)行駛工況按照預(yù)先設(shè)定好的控制方法輸出附加轉(zhuǎn)角的控制量,再由執(zhí)行器將附加轉(zhuǎn)角疊加到前輪轉(zhuǎn)角上[5]。
疊加后的前輪轉(zhuǎn)角:

圖2 機(jī)械式疊加主動轉(zhuǎn)向系統(tǒng)原理圖
1.4 防抱死制動器模型
ABS的工作原理是,通過調(diào)節(jié)制動力矩使得滑移率在理想滑移率附件變化,因為輪胎處于理想滑移率時能最大限度的利用地面附著系數(shù),獲得較大的制動力和側(cè)向力,從而縮短制動距離,防止車輛側(cè)滑。其中通過液壓傳動單元調(diào)節(jié)輪缸液壓來控制制動力矩,本文將液壓單元簡化為一個電磁閥單元和一個積分單元。電磁閥單元的傳遞函數(shù):
G(s)=KT?s+1?1s=100s(0.01s+1) (7)
2、控制器設(shè)計
2.1 主動前輪轉(zhuǎn)向控制器設(shè)計
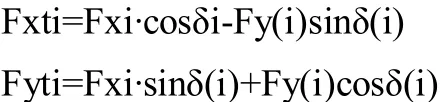
本文采用橫擺角速度反饋控制,即利用實際橫擺角度和理想橫擺角速度之差進(jìn)行反饋控制。選擇PID控制作為控制方法[6],以理想橫擺角速度與實際角速度之間的偏差e和偏差的變化率ec作為PID控制器的輸入。經(jīng)PID控制器計算后,輸出附加前輪轉(zhuǎn)角。
PID控制規(guī)律為:

其中理想橫擺角速度由二自由度線性車輛模型得出:

式中:
Cf、Cr:為前后輪側(cè)偏剛度
l=a+b:為軸距
如圖3所示,基于Matlab/Simulink建立AFS系統(tǒng)模型。
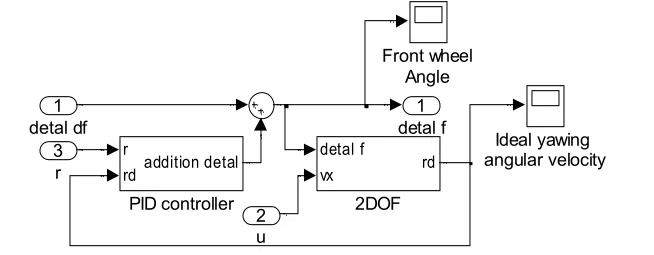
圖3 AFS PID控制仿真模型圖
2.2 防抱死制動系統(tǒng)控制器設(shè)計
對于ABS控制系統(tǒng),本文采用魯棒性好、控制規(guī)律靈活的自適應(yīng)模糊控制方法。控制器的輸入量e為最佳滑移率與實際滑移率之間的差值,輸入量ec為該差值的變化率,輸出量u為制動壓力的控制量。將滑移率誤差E 在論域[-0.2,0.8]上劃分為6檔:NB,NM,ZE,PS,PM,PB;滑移率誤差變化率E C和制動壓控制量U在論域均為 [-6, 6] ,且都劃分為7檔:NB,NM,NS ,ZE,PS,PM,PB。相應(yīng)的比例因數(shù)分別為Ke=Kec=1、Ku=1/6 ,具體控制規(guī)則如表1所示。

表1 模糊控制規(guī)則表
結(jié)合前文提到的ABS控制器模型和ABS模糊自適應(yīng)控制理論,基于Matlab/Simulink建立ABS系統(tǒng)仿真模型,如圖4所示。
圖4 ABS 模糊控制仿真模型圖
2.3 協(xié)同控制器設(shè)計
綜合考慮主動前輪轉(zhuǎn)向系統(tǒng)與防抱死制動系統(tǒng)之間的干涉和耦合[7]。制定了如下協(xié)同控制規(guī)則:當(dāng)橫擺角速度超過橫擺角速度門限時,AFS主要控制目標(biāo)是橫擺角速度,ABS前輪單獨控制后輪低選,來保證橫向穩(wěn)定性;當(dāng)橫擺角速度小于等于橫擺角速度門限時,AFS正常控制,ABS四輪獨立控制,充分利用地面附著系數(shù)。
3、仿真結(jié)果
基于Matlab/Simulink 建立仿真模型,仿真車輛的基本參數(shù)如表2所示。將車輛的初始速度設(shè)為100km/h,為模擬轉(zhuǎn)向制動工況,給方向盤輸入一個階躍信號。

表2 車輛基本參數(shù)表
由圖5可知,相對于單獨控制,協(xié)調(diào)控制作用下的汽車制動距離減少了4.85m,制動時間也明顯縮短了,具有良好的制動效能。

圖5 制動距離
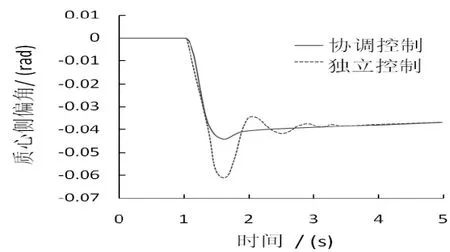
圖6 質(zhì)心側(cè)偏角
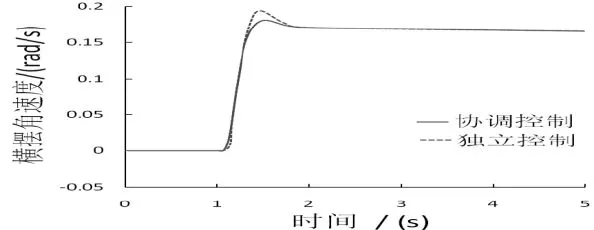
圖7 橫擺角速度
從圖6-7中可以看出,協(xié)調(diào)控制下的汽車質(zhì)心側(cè)偏角超調(diào)量明顯降低,降低了0.017rad,并且很快趨于穩(wěn)定,相較于獨立控制達(dá)到穩(wěn)定狀態(tài)所用的時間縮短了1.32s;橫擺角速度超調(diào)量也降低了0.016rad/s,更快的趨于穩(wěn)定,提高了汽車的方向穩(wěn)定性。
4、結(jié)論
本文基于Matlab/Simulink建立了前輪主動轉(zhuǎn)向系統(tǒng)和防抱死制動系統(tǒng)的數(shù)學(xué)模型,采用對比分析比較法,驗證了在轉(zhuǎn)向制動工況下,與AFS和ABS獨立控制系統(tǒng)相比較,協(xié)調(diào)控制系統(tǒng)能夠在保持車輛制動穩(wěn)定性的同時縮短制動距離,充分發(fā)揮兩子系統(tǒng)的優(yōu)勢,進(jìn)一步了提高車輛的操縱性和安全性。
參考文獻(xiàn)
[1] 李果,郭亭亭,劉亞赟.汽車底盤系統(tǒng)協(xié)同控制[J].北京信息科技大學(xué)學(xué)報, 2015, 30(2):1-8
[2] Willy K, Gerd R, Wolfgang R.Concept and Functionality of the Active Front Steering System[C].SAE 2004-21-0073.
[3] 喻凡,林逸. 汽車系統(tǒng)動力學(xué)[M].北京:機(jī)械工業(yè)出版社, 2005.171-174.
[4] 魏朗 .用于碰撞事故中車輛動力學(xué)模擬的輪胎模型分析 [J].西安公路交通大學(xué)學(xué)報, 1999, 19(2):73-76.
[5] 周兵,徐蒙,范璐.基于EKF輪胎側(cè)向力估計的AFS和EPS集成控制[J].振動與沖擊,2015,32(11):93-98
[6] 呂緒寧.汽車主動橫向穩(wěn)定性桿與主動前輪轉(zhuǎn)向協(xié)調(diào)控制[D].湖南:湖南大學(xué), 2014.
[7] 姜煒,余卓平,張立軍.汽車底盤集成控制綜述[J].汽車工程,2007, 29(5):420-425.
Coordination Control of Active Front Steering and ABS
Li Qiang, Li Han, Fu Jingshun
(Shenyang University of Technology, Liaoning Shenyang 110870)
Abstract:A coordination control method is designed for vehicle Active Front Steering (AFS) and Anti-lock Braking System (ABS) on steering braking condition.7-DOF vehicle model, steering system model, braking system model and the tire model are established, andthe AFS controller, ABS controller, coordinated controller of two subsystems are also designed. Simulation analysis and comparison of the proposed control strategy are carried out. The simulation results showed: on the steering braking condition, compared with AFS and ABS independent control, the coordination controlobtain the better vehicle stability and gain the greater braking efficiency; the advantage of two subsystem are fully used, finally enhance the vehicle’s braking performance and directional stability.
Keywords:AFS; ABS; Coordination Control
作者簡介:李晗,就職于沈陽工業(yè)大學(xué)。
中圖分類號:U463.4
文獻(xiàn)標(biāo)識碼:A
文章編號:1671-7988(2016)02-106-03