一種用于高速無人機的對地目標捕獲和識別方法
2016-04-09 02:52:03王春龍馬傳焱時荔蕙郝博雅
無線電工程 2016年3期
王春龍,馬傳焱,時荔蕙,郝博雅,周 洲
(1.西北工業大學 無人機特種技術重點實驗室,陜西 西安 710065;
2.中國人民解放軍63961部隊,北京 100012)
?
一種用于高速無人機的對地目標捕獲和識別方法
王春龍1,2,馬傳焱2,時荔蕙2,郝博雅2,周洲1
(1.西北工業大學 無人機特種技術重點實驗室,陜西 西安 710065;
2.中國人民解放軍63961部隊,北京 100012)
摘要隨著高速無人機的應用愈加廣泛,高速無人機對地目標的捕獲方法也成為研究熱點。提出了一種用于高速無人機的對地目標捕獲、識別方法。該方法捕獲速度快、適用范圍廣,所需裝置簡單,使用方便,可克服圖像快速刷新,人工引導方法無法及時發現目標、捕獲鎖定失敗等問題,提高了大速高比條件下對地捕獲、跟蹤的可靠性和便捷性,豐富了無人機對地目標捕獲、識別理論。
關鍵詞高速無人機;目標捕獲;目標識別;坐標轉換
A Method of Ground Target Acquisition and Identification for High-speed UAV
WANG Chun-long1,2,MA Chuan-yan2,SHI Li-hui2,HAO Bo-ya2,ZHOU Zhou1
(1.ScienceandTechnologyonUAVLaboratory,NorthwesternPolytechnicUniversity,Xi’anShaanxi710065,China;
2.Unit63961,PLA,Beijing100012,China)
AbstractWith the extensive application of high-speed UAV,the method of ground target acquisition is the hotspot of research.This paper presents a method of target acquisition and identification for high-speed UAV.The method has such characteristics as rapid acquisition,broad application,and simple device and operation.It can solve such problems as rapid image refreshing,target missing in manual guidance,and failure in target lock-on.Moreover,the reliability and simplicity of ground target acquisition and tracking are improved.This method enriches the theory of UAV technique of ground target acquisition and identification,and has an important military value and practical significance.
Key wordshigh-speed UAV;target acquisition;target identification;coordinate transformation
0引言
高速無人機具有飛行速度快、突防能力強和偵察效率高等優點,在陸軍精確打擊體系中發揮重要作用[1]。但隨著無人機飛行速度的提高,光電成像速高比和圖像刷新率不斷增大,地面目標在獲取圖像中的駐留時間不斷減少,嚴重影響人工發現和識別地面目標。一般認為,目標在圖像中至少駐留8~10 s才能被人工觀測和識別,目標在圖像中駐留時間的減少意味著漏檢或誤判的可能性攀升,需要采取措施為目標捕獲、跟蹤提供可靠的方法。
趙基宇等[2]針對無人飛艇地面目標檢測中細節信息缺失的問題,提出利用Lucas-Kanade方法跟蹤目標區域內特征點,實現靜態目標的連續檢測。通過圖像特征點的跟蹤估計相鄰幀圖像間的全局運動,進而對圖像進行運動補償,利用補償后的幀差圖實現運動目標的檢測;辛哲奎等[3]針對小型無人機地面目標跟蹤系統,提出了一種借助于圖像中靜態點的運動信息,來估計由于攝像機運動引起的圖像變化,并進而估計得到目標的運動速度,從而減少機載傳感器噪聲對目標速度估計的影響;賈偉等[4]依據規劃航線和飛機姿態與高度信息建立了“視線定角”的平臺數引模型,改善了條帶連拍性能和區域搜索的操作疲勞度。通過建立轉臺方位角和高低角數引模型,解決了無人機動態飛行過程中控制光軸持續指向目標的問題,保持目標持續穩定跟蹤;邱曉波等[5]將地面目標運動特性和運動狀態作為先驗信息,設計了一種基于加權觀測融合卡爾曼濾波器和模型組切換方法變結構多模型算法的地面目標跟蹤算法;謝斌等[6]提出了一種基于貝葉斯濾波器和適航地圖的跟蹤算法(BF-H map)解決間斷觀測下的無人機地面目標跟蹤問題;王建平等[7]給出連續圖像幀差分和二次幀差分改進的圖像HSI差分模型,采用自適應分割算法能在任意條件下自動提取運動目標區域,實現視頻運動目標的檢測與識別;范秀英等[8]為滿足航空相機成像時影像重疊率和動態分辨率的需要,運用公式推導法分析了速高比對照相間隔和影像位移的影響;張景國等[9]為了實現對前向像移的補償,提出一種通過合理調整快門曝光時間和飛機速高比之間的關系來補償前向像移的方法;任航等[10]采用在相機與飛機間增設3軸穩定平臺的機械式像移補償法來補償姿態像移和前向像移,3軸穩定平臺的3軸按照與飛機姿態變化角速率相等、方向相反進行旋轉補償姿態像移,3軸穩定平臺的俯仰軸以飛行方向反方向、角速率等于速高比旋轉補償前向像移。
綜上,由于自動識別檢測技術發展水平限制,國內外還沒有很好的方法解決高速無人機的對地目標捕獲和識別問題。普遍采用的基于人工控制光電成像設備轉動補償載機速高比,實際使用中由于人工操作難以準確控制各軸系的轉動速度而導致目標搜索、捕獲和識別操作失敗。
本文提出了基于一種裝置的對地目標捕獲識別方法,通過仿真驗證了方法的有效性。
1對地目標捕獲識別裝置
對地目標捕獲、識別裝置構成如圖1所示,裝置主要包括航空光電成像設備1、固定基板2、慣導4、飛控計算機7、航空光電成像設備至慣導和飛控計算機的電纜3以及航空光電成像設備至飛控計算機的電纜6和飛機8組成。
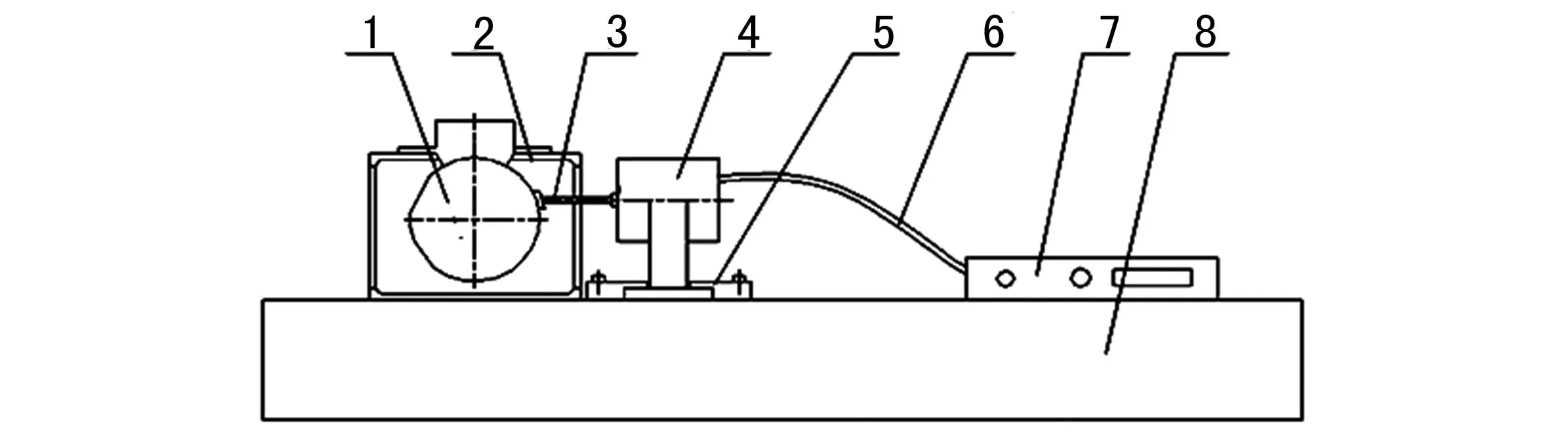
圖1 對地目標捕獲、識別裝置構成示意
航空光電成像設備1通過固定基板2固定在飛機8上,航空光電成像設備1至慣導4和飛控計算機7的電纜3、航空光電成像設備1至飛控計算機7的電纜6將航空光電成像設備1、慣導4和飛控計算機聯系在一起。航空光電成像設備實時接收慣導送來的姿態數據,同時接收飛控計算機送來的搜索、捕獲或跟蹤指令和地面目標地理坐標數據,利用這些數據經過計算實現對已知或未知地面坐標目標進行捕獲和識別。
2已知位置目標的捕獲識別
2.1算法原理
目標定位坐標關系示意圖如圖2所示,當航空光電成像設備準確指向地面目標時,航空光電成像設備與地面目標之間的連線即是航空光電成像設備的光軸。在地球直角坐標系中,根據幾何學原理可知,已知2個端點的坐標后可以求解出連接這2個端點的線段相對坐標平面的夾角,而這一夾角就是航空光電成像設備的光軸指向角度。根據坐標解算后可以實時解算出載機動態飛行中航空光電成像設備的光軸指向角度從而引導航空光電成像設備實時指向目標,達到“目標地理經緯度位置引導跟蹤”的效果。該引導跟蹤效果指向目標后,可以使目標保持在視場中,從而達到延長目標在視場內的駐留時間,為操作人員捕獲目標、判斷和識別目標提供了充分的時間。

圖2 目標定位坐標關系示意
航空光電成像設備對已知經緯度目標的跟蹤算法步驟如下:
① 利用目標的大地坐標系(L1,B1,H1)、載機的坐標系(L2,B2,H2)解算出目標在大地坐標系中的坐標(x1,y1,z1):

式中,Re為地球半徑。
② 利用無人機航向角φ、俯仰角γ和滾轉角θ分別進行坐標變換,得到目標在航空光電成像設備框架坐標系中的坐標(x2,y2,z2):

③ 根據目標坐標(x2,y2,z2)計算出航空光電成像設備與地面目標之間的連線在航空光電成像設備框架坐標系中的驅動角度(α,β):

航空光電成像設備控制框架電機隨動此角度(α,β),從而實現實時指向地面目標。
2.2仿真驗證
按照2.1節所述原理,搭建半實物仿真環境,對算法功能進行驗證。
設置地面目標位置為:
(L1,B1,H1)=(107.923 40°,19.654 10°,0.5 km)。
連續采集多組數據進行框架驅動角度計算,表1中列出了其中10組數據。

表1 仿真數據
最終,框架電機在表1所示的(α,β)角度驅動下,能夠讓瞄準線實時指向地面目標,算法原理和功能得到驗證。
3未知位置目標的捕獲識別
3.1算法原理
無人機相對地面目標高速飛行,導致地面目標快速地從航空光電成像設備的視場內穿過,這一穿越角速度可由載機飛行速度、載機姿態、航空光電成像設備的框架角和載機相對地面的高度信息通過坐標變換而解算得到。利用此穿越角速度控制航空光電成像設備的框架反向運動,可實現精確的“速高比補償”效果。此速高比補償指向目標后,可以使目標保持在視場中,從而達到延長目標在視場內駐留時間的目的,為操作人員捕獲目標、判斷和識別目標提供了充分的時間。
此方法經歷2個步驟,第1階段是自主目標定位,第2階段是自主數引。


② 利用無人機航向角φ、俯仰角γ、滾轉角θ分別進行坐標旋轉,得到目標點在導航坐標系中坐標(x,y,z):
③ 利用無人機衛星導航信息經度L、緯度B及高度H進行坐標平移和旋轉,得到目標點在大地直角坐標系中坐標(X,Y,Z):

④ 將目標大地直角坐標(X,Y,Z)系轉換為大地坐標系(L1,B1,H1):


⑤ 利用目標的大地坐標系(L1,B1,H1)、載機的坐標系(L2,B2,H2)解算出目標在大地坐標系中的坐標(x1,y1,z1):

式中,Re為地球半徑。
⑥ 通過坐標變換得到目標在航空光電成像設備框架坐標系統中的坐標(x2,y2,z2):

⑦ 根據目標坐標計算出連線在航空光電成像設備框架坐標系中的驅動角度(α,β):

航空光電成像設備控制框架電機隨動此角度(α,β),從而實現實時指向地面目標。
3.2仿真分析
由于對未知位置目標的捕獲識別采用的方法首先要對目標進行定位,所以目標定位誤差對目標捕獲時間有較大影響。定位誤差越小,目標捕獲速度越快。
通過Matlab仿真建模,對上述關系進行仿真分析,得到結果如圖3所示。

圖3 定位誤差對目標捕獲時間的影響關系
由圖3可以看到,當目標定位誤差小于30 m時,目標捕獲時間小于900 ms。
4結束語
本文提出了基于目標經緯度數引跟蹤的對已知經緯度目標捕獲識別方法和基于速高比自動解算補償的對未知經緯度目標捕獲識別方法。利用解算出光電成像設備需要指向的方位、俯仰和橫滾姿態角,控制航空光電成像設備的框架角度隨動于此解算值,以延長指向目標的時間,進而延長了目標駐留在視場中的時間,為操作人員搜索、捕獲、跟蹤和識別目標提供了充足的時間,該方法對其他高速飛行器同樣適用,具有廣泛應用前景。
參考文獻
[1]張楠,王瀟,王軍力.無人機在陸軍精確打擊體系中的應用研究[J].兵工學報,2010,31(Suppl2):107-111.
[2]趙基宇,胡士強.基于視覺的無人飛艇地面目標檢測[J].計算機工程,2012,38(8):170-172.
[3]辛哲奎,方勇純,張玉東.基于視覺的小型無人機地面目標狀態估計[C]∥第二十九屆中國控制會議論文集,2010:3 747-3 752.
[4]賈偉,孫美蕊,李大健.無人機光電載荷地理跟蹤控制研究[J].航空計算技術,2012,42(2):117-119.
[5]邱曉波,劉洪巖,朱東旭.一種地面目標跟蹤算法的設計與實現[J].彈箭與制導學報,2011,31(1):59-62.
[6]謝斌,項志宇.一種間斷觀測下的無人機地面目標跟蹤方法[J].北京理工大學學報,2011,31(1):38-43.
[7]王建平,劉偉王,金玲.一種視頻運動目標的檢測與識別方法[J].計算技術與自動化,2007,26(3):78-80.
[8]范秀英,趙曼,郭霏.速高比對航空相機的影響分析[J].兵工自動化,2014,33(3):1-4.
[9]張景國,丁亞林,田海英.一種彩色面陣CCD測繪相機前向像移的補償方法[J].應用光學,2011,32(3):460-463.
[10]任航,袁紅艷.面陣CCD航測相機像移補償技術研究[J].半導體光電,2011,32(3):417-420.
王春龍男,(1979—),博士。主要研究方向:無人機技術論證與管理研究。
馬傳焱男,(1972—),博士。主要研究方向:飛行器測控與導航技術研究。
作者簡介
基金項目:預研基金資助項目(9140A2511315HK03380)。
收稿日期:2015-12-31
中圖分類號TP302
文獻標識碼A
文章編號1003-3106(2016)03-0037-04
doi:10.3969/j.issn.1003-3106.2016.03.11
引用格式:王春龍,馬傳焱,時荔蕙,等.一種用于高速無人機的對地目標捕獲和識別方法[J].無線電工程,2016,46(3):37-40.
