甜菜收獲機自動對行液壓糾偏執行系統設計與試驗
2016-03-23 03:20:06王申瑩胡志超吳惠昌彭寶良謝煥雄顧峰瑋
農機化研究 2016年3期
王申瑩,胡志超,吳惠昌,彭寶良,謝煥雄,顧峰瑋
(農業部 南京農業機械化研究所,南京 210014)
?
甜菜收獲機自動對行液壓糾偏執行系統設計與試驗
王申瑩,胡志超,吳惠昌,彭寶良,謝煥雄,顧峰瑋
(農業部 南京農業機械化研究所,南京210014)
摘要:隨著農業機械機電液一體化程度以及設備性能的不斷提高,甜菜收獲機也逐漸向自動化智能化方向發展。為此,設計了甜菜收獲機自動對行液壓糾偏執行系統總體機構,確定了系統工作原理。通過設計、計算分析,確定了液壓元器件的主要結構和工作參數。同時,應用AMESim軟件對系統進行了建模與仿真以及動態響應特性分析,確定了液壓流量和壓力的取值范圍。對系統進行了物理樣機設計和臺架試驗,得出了液壓流量和壓力對性能指標系統反應時間的影響規律和趨勢,以及液壓流量和壓力的最佳取值,即當液壓流量為25L/min,供油壓力為18MPa時,系統反應時間最小。
關鍵詞:甜菜;收獲機械;自動對行;液壓仿真;AMESim
0引言
甜菜是我國重要的經濟作物,而其生產機械化卻嚴重滯后,尤其是收獲作業主要依靠人工和半機械化完成。隨著勞動力成本的增加及甜菜生產對自動化、智能化和現代化要求的提高,甜菜收獲機需要采用自動對行挖掘收獲技術,來解決以前甜菜挖掘收獲中存在的漏挖率高、損失大、需人工再次挖掘、作業效率低、駕駛員勞動強度大及作業成本高等問題[1-3]。其中,液壓糾偏執行系統是甜菜機械化收獲自動對行系統的 “手臂”, 液壓糾偏執行系統的結構設計與參數選定的合理與否,決定了系統能否及時地根據控制信號將收獲機挖掘鏟糾偏到位。
本文主要借鑒其他農業收獲機械及各行業領域液壓系統設計的經驗,設計分析甜菜機械化收獲自動對行系統的液壓糾偏執行機構及工作參數等,應用工程系統仿真高級建模環境軟件AMESim系統進行建模、運行仿真和動態響應特性分析,并進行實驗臺臺架試驗,以期為甜菜收獲機械自動對行系統的設計提供理論參考。
1結構與工作原理
甜菜收獲機自動對行系統主要由偏離信號檢測系統、液壓糾偏執行系統和信號處理控制系統組成。其中液壓糾偏執行機構的總體結構如圖1所示。其主要由前轉向機構、前轉向角度反饋轉換機構、后輪轉向角度反饋轉換觀察機構、后輪轉向角度反饋轉換機構、后輪轉向機構、軟軸及車架等組成[4-5]。
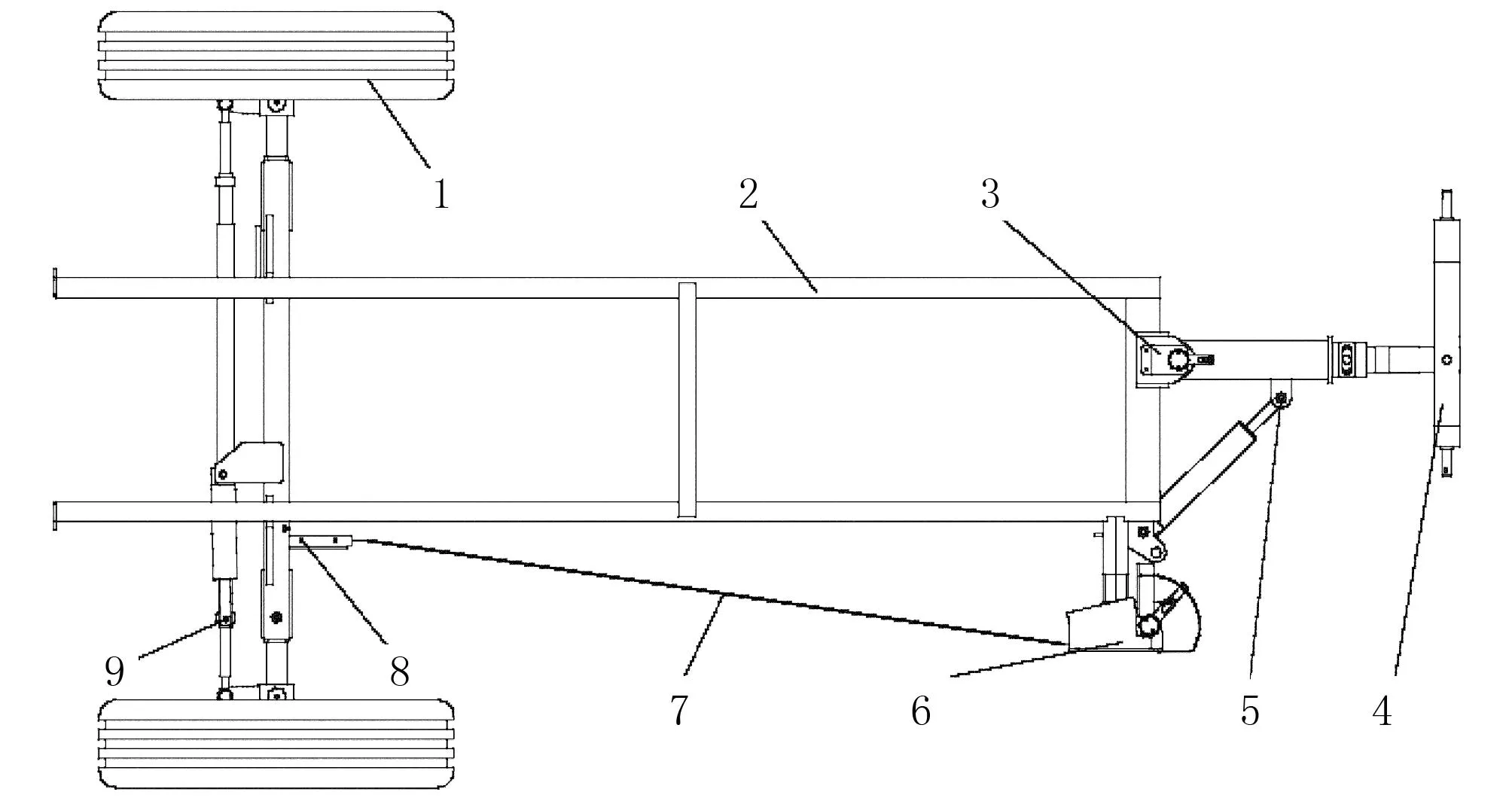
1.輪胎 2.車架 3.前轉向角度反饋轉換機構 4.牽引架
收獲機作業過程中,當偏離信號檢測系統檢測到甜菜塊根的偏離位移并將信息傳送給控制器后,控制器判斷發出控制信號給液壓糾偏執行系統,前轉向機構帶動車架做相應的左右擺動,后輪轉向機構帶動后輪偏轉,配合前轉向機構糾偏。為了防止糾偏過量,通過前、后角度角度反饋轉換機構將前、后轉向機構的轉角量由角度傳感器實時反饋給控制器。同時,為了減小收獲機在地頭掉頭轉彎時的轉彎半徑,方便駕駛員觀察后輪的轉向及其大小,本文采用了軟軸將后輪轉向角度反饋轉換機構與后輪轉向角度反饋轉換觀察機構連接起來,并在觀察機構上標示了對應的轉角刻度。
糾偏執行系統液壓工作原理圖如圖2所示。其中,三位四通電磁閥為主要控制閥,前轉向機構液壓缸和后輪轉向機構液壓缸為動作執行者。當控制器接收到偏離信號檢測系統的甜菜塊根偏移信號后,首先判斷并發出二位三通電磁閥的控制信號,使高壓油進入油路;再判斷甜菜塊根偏移的方向并發出三位四通電磁閥的控制信號,動作前轉向機構液壓缸對挖掘位置進行糾偏調整;同時控制器判斷發出三位四通電磁閥的控制信號,動作后輪轉向機構液壓缸使后輪作相應的轉向調整糾偏。甜菜收獲機前進的速度及塊根偏移量的不同,轉向液壓缸的調節速度和調節量也不盡相同,所以增加了二位三通電磁閥和節流閥。當需要放慢調整速度或精確調整時,控制器發出二位三通電磁閥的控制信號,使高壓油通過節流閥輸送給三位四通電磁閥,使前后轉向液壓缸動作平穩、精確;加入溢流閥是為了保證液壓油路的安全以及油壓的穩定。
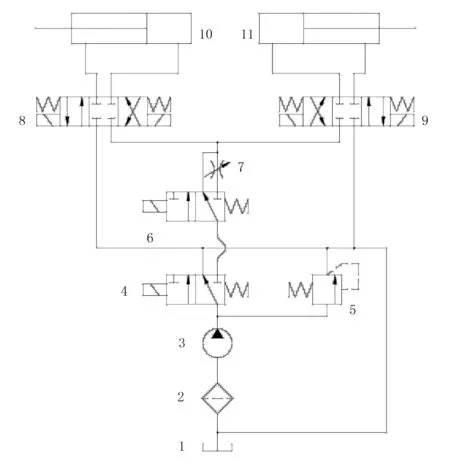
1.油箱 2.過濾器 3.液壓泵 4、6.二位三通電磁閥
2液壓元器件的設計與選型
由甜菜主產區調研數據統計分析的結果可知:液壓糾偏執行機構需要糾偏的范圍不大,但需要的力比較大;系統要求響應快、精度高、結構簡單、成本低,而對效率和發熱量要求不高;系統屬于中小功率,所以本文采用的是閥控液壓缸控制方式。
2.1供油壓力Ps的選擇
適當選擇較高的供油壓力,在相同輸出功率條件下,可以減小液壓動力元件、液壓能源裝置和連接管道等部件的質量和尺寸,以及減小壓縮性容積和油液中所含空氣對體積彈性模量的影響,有利于提高液壓固有頻率,即系統的響應速度;但液壓執行器主要規格尺寸(如液壓缸的活塞面積)減小,不利于液壓固有頻率的提高。選擇較低的供油壓力,可以降低成本,減小泄露、能量損失和溫升,降低噪聲較低,可以延長使用壽命,易于維護。本文結合經濟性和系統靈敏性綜合考慮,參考其他土下果實收獲機械的研究成果選用農業機械常用的中壓Ps=18MPa。
2.2液壓缸設計
本文采用工程上常用的近似計算方法確定液壓缸的主要規格尺寸,即按最大負載力FLmax確定液壓缸的規格尺寸。本系統的負載力由摩擦力Ff、慣性力Fa和外作用負載Fe組成,系統無彈性負載。參考文獻[6-7],同時為了簡化,認為摩擦力與速度無關。則有
FLmax=Ff+Fa+Fe
(1)
Ff=fMtg
(2)
Fa=Mtamax
(3)
amax=vn2πf-3dB
(4)
式中Mt—運動部件總質量(kg);
g—重力加速度,取g=9.8m/s2;
amax—最大糾偏加速度(m/s2);
vn—糾偏速度,取vn=8.3×10-2m/s;
f-3dB—常數,f-3dB=3;
f—摩擦因數,取f=0.08。
(5)
(6)
式中D—液壓缸活塞直徑(mm);
d—活塞桿直徑(mm)。
將FL=FLmax=26 996N帶入式(5),由式(6)計算得Ap=2.25×10-3m2。則
(7)
按GB/T2348-1993《液壓缸缸內徑和活塞桿直徑系列》圓整為d=0.032m=32mm,D=63mm,校核有效面積得
(8)
為了使轉向機構液壓缸伸縮的速度一樣,液壓缸采用雙桿雙作用的結構形式。結合前后轉向機構的設計尺寸和安裝位置,前后轉向液壓缸的主要結構參數如表1所示。
表1液壓缸結構參數
Table 1Structure parameters of hydraulic cylinder
mm
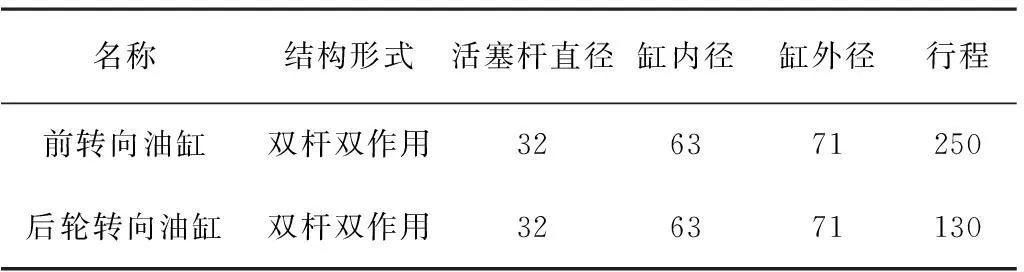
名稱結構形式活塞桿直徑缸內徑缸外徑行程前轉向油缸雙桿雙作用326371250后輪轉向油缸雙桿雙作用326371130
2.3電磁閥規格的確定
電液控制閥是液壓技術與電子技術相結合發展的一類液壓閥,是電液控制系統的核心,包括電液伺服閥、電液比例閥和電液數字閥。電液控制閥的特性、規格參數直接影響甚至決定著整個系統的特性。本文結合系統性能要求和經濟性考慮,選擇開關換向閥。
電磁閥的負載流量按最大速度確定,即
qL=vmaxAP=11.52L/min
(9)
此時電磁閥壓降pv為
(10)
考慮到泄露等影響,將負載流量qL放大20%,取qL=13.82L/min。
根據qL和pv,由電磁閥壓降-流量關系曲線(見圖3),查得額定流量qn為20L/min的電磁閥可以滿足要求。考慮額定流量、抗污染能力及使用要求等因素,本文采用德國Comatrol公司的插裝式電磁閥,內部原理如圖4所示。其具有結構緊湊、液阻小、通流能力大、動作快及泄漏少等一系列優點,具體性能參數如表2所示。
3AMESim建模與仿真分析
3.1建模與仿真
AMESim(Advanced Modeling Environment for performing Simulation of engineering systems)工程系統仿真高級建模環境,是一種基于鍵合圖的高級系統建模、仿真及動態性能分析軟件。AMESim擁有一套標準且優化的應用庫,擁有4 500個多領域的模型,使工程師可以從繁瑣的數學建模中解放出來,專注于物理系統本身的設計[8-11]。工程師通過AMESim從研發階段開始就能對機電液一體化智能系統的功能、性能進行分析,通過修改模型和仿真參數,進行仿真計算、繪制曲線并進行仿真結果分析,迅速達到建模仿真的最終目標—分析和優化工程師的設計,從而幫助用戶降低開發成本、縮短開發周期。
由上述分析可知:液壓糾偏執行系統實質上是一個閥控液壓缸的位置控制系統,通過甜菜塊根偏離行中心的左右位置控制收獲機挖掘鏟的左右挖掘位置。因為前轉向機構和后輪轉向機構液壓原理相同,為了簡化模型,將甜菜收獲機簡化為一質量塊;液壓缸轉向所受的阻力由信號發生器和信號-力轉換元件產生;用電機模擬變速裝置為液壓泵提供動力;用信號發生器模擬產生甜菜塊根偏離距離對應的信號。在AMESim的草圖模式(Sketch mode)中,從機械庫、液壓庫和信號控制庫中選擇元器件,建立液壓糾偏執行系統的前轉向機構模型進行分析[12-15],如圖5所示。
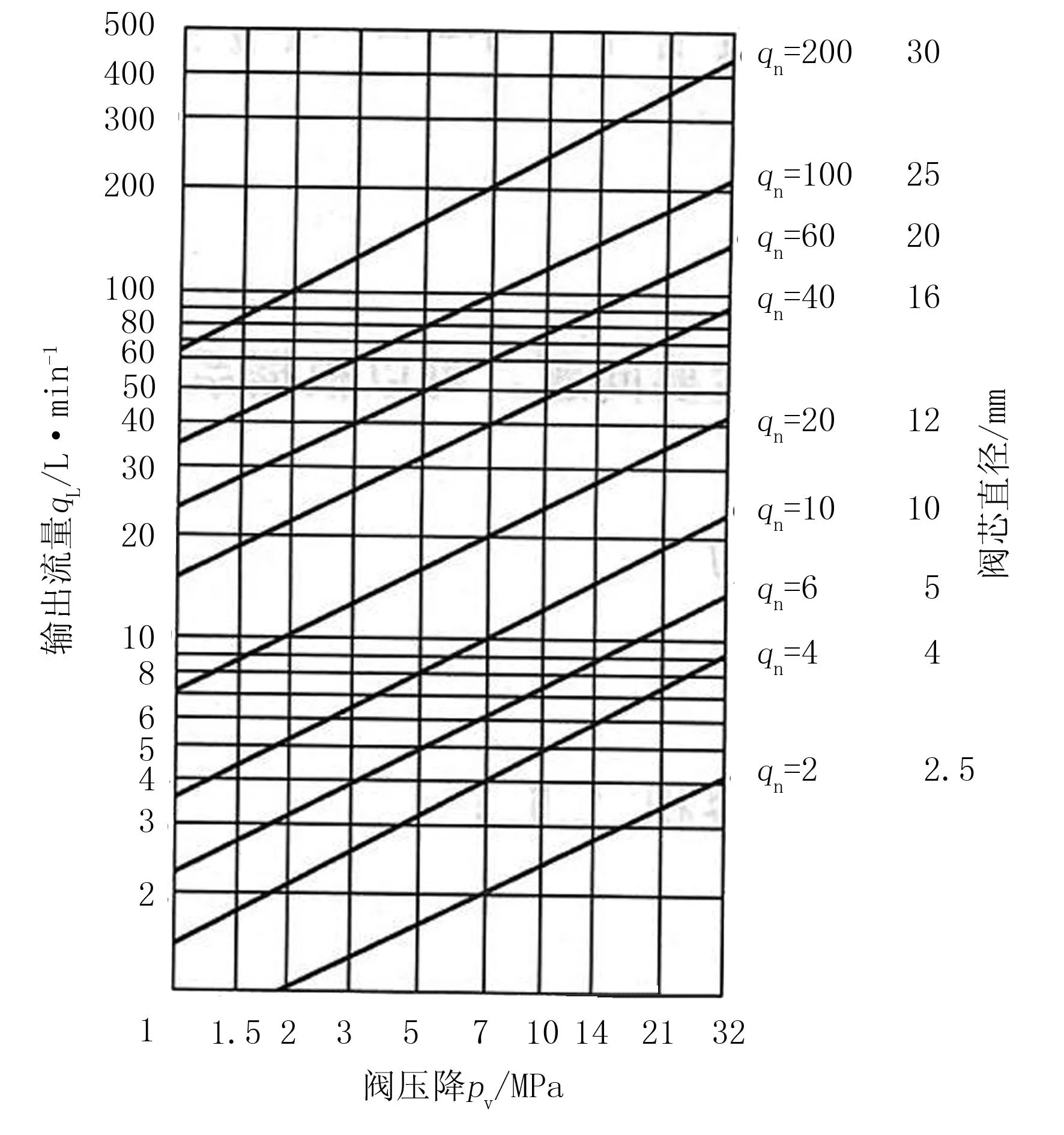
圖3 閥壓降—流量關系曲線
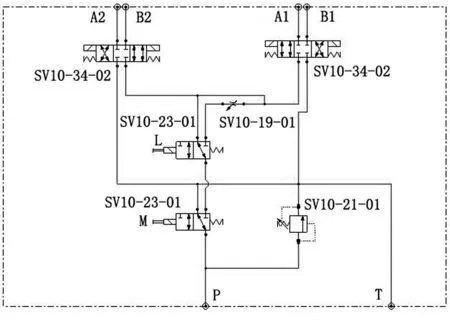
圖4 插裝閥原理圖
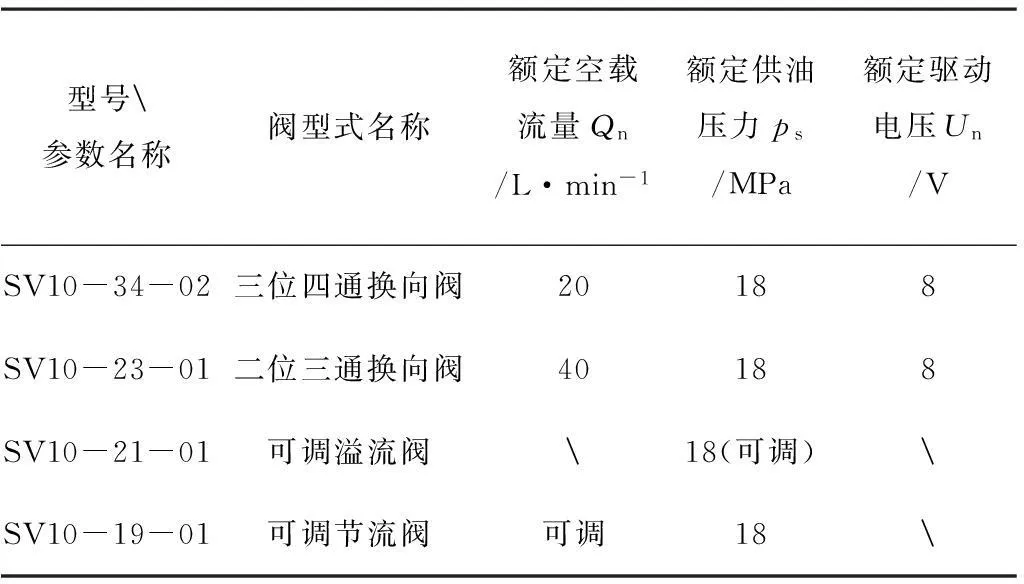
型號參數名稱閥型式名稱額定空載流量Qn/L·min-1額定供油壓力ps/MPa額定驅動電壓Un/VSV10-34-02三位四通換向閥20188SV10-23-01二位三通換向閥40188SV10-21-01可調溢流閥18(可調)SV10-19-01可調節流閥可調18

圖5 液壓系統仿真模型
在子模型模式(Submodels mode)中根據實際情況選擇最簡子模型作為每個元件的數學子模型;在參數模式(Parameters mode)中根據系統設計參數值對各個元器件進行參數設置。將泵的排量設置為19cc/rev,轉速設置為2 000r/min;電機轉速設置為2 000r/min;溢流閥壓力設置為180bar;電磁換向閥固有頻率50Hz,流量20L/min,阻尼率2,額定電流200mA;液壓缸活塞直徑設置為63mm,活塞桿直徑設置為32mm,行程設置為250mm,所連質量塊設置為7 200kg(按裝滿甜菜時的最大質量設置);分段信號源1設置為常量26 996,則經過信號到力的轉換,液壓缸活塞桿就能得到一個恒為26 996N的阻力;結合調研數據統計分析結果將給定的期望位移信號設置在0~0.1m之間,而執行機構液壓缸的位移在0~0.25之間。為了提高測量精度,使給定的期望位移與執行機構的實際輸出在相同的范圍內變化,故將增益3設置為2.5;分段線性信號源2設置為在0~4s內由0變化到0.05,在4~8s內由0.05變化到0.09,在8~12s內由0.09變化到0.06,在12~16s內由0.06變化到0并保持不變;其他參數取默認值。
3.2動態響應特性分析
為了保證甜菜收獲機自動對行收獲的效果,液壓糾偏執行系統應具有良好的動態響應特性。根據調研統計分析結果,系統應達到的性能指標:在運行時間20s內,動態跟蹤誤差不超過0.012 5m,穩態誤差不超過0.002 5m,即收獲機挖掘鏟動態位置偏差不超過0.005m,穩態位置偏差不超過0.001m。
3.2.1供油壓力的影響
由液壓控制原理可知,系統供油壓力對系統性能,特別是動態響應特性有很大的影響。在液壓系統仿真模型中,通過調節溢流閥開啟壓力來改變系統的供油壓力的大小,觀察液壓缸活塞桿的實際輸出位移與所給定的期望值之差,找到滿足性能要求的供油壓力范圍。
當供油壓力Ps=150bar時,液壓缸活塞桿實際位移和期望位移曲線,如圖6所示;實際位移和期望位移之差曲線,如圖7所示。由此可知,此時系統的穩態誤差是滿足要求的;但動態誤跟蹤誤差超過了0.012 5m,不滿足性能指標要求。
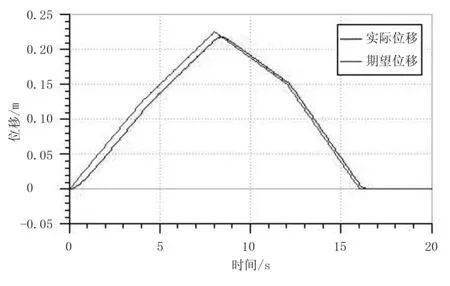
圖6 實際位移與期望位移曲線(Ps=150bar)
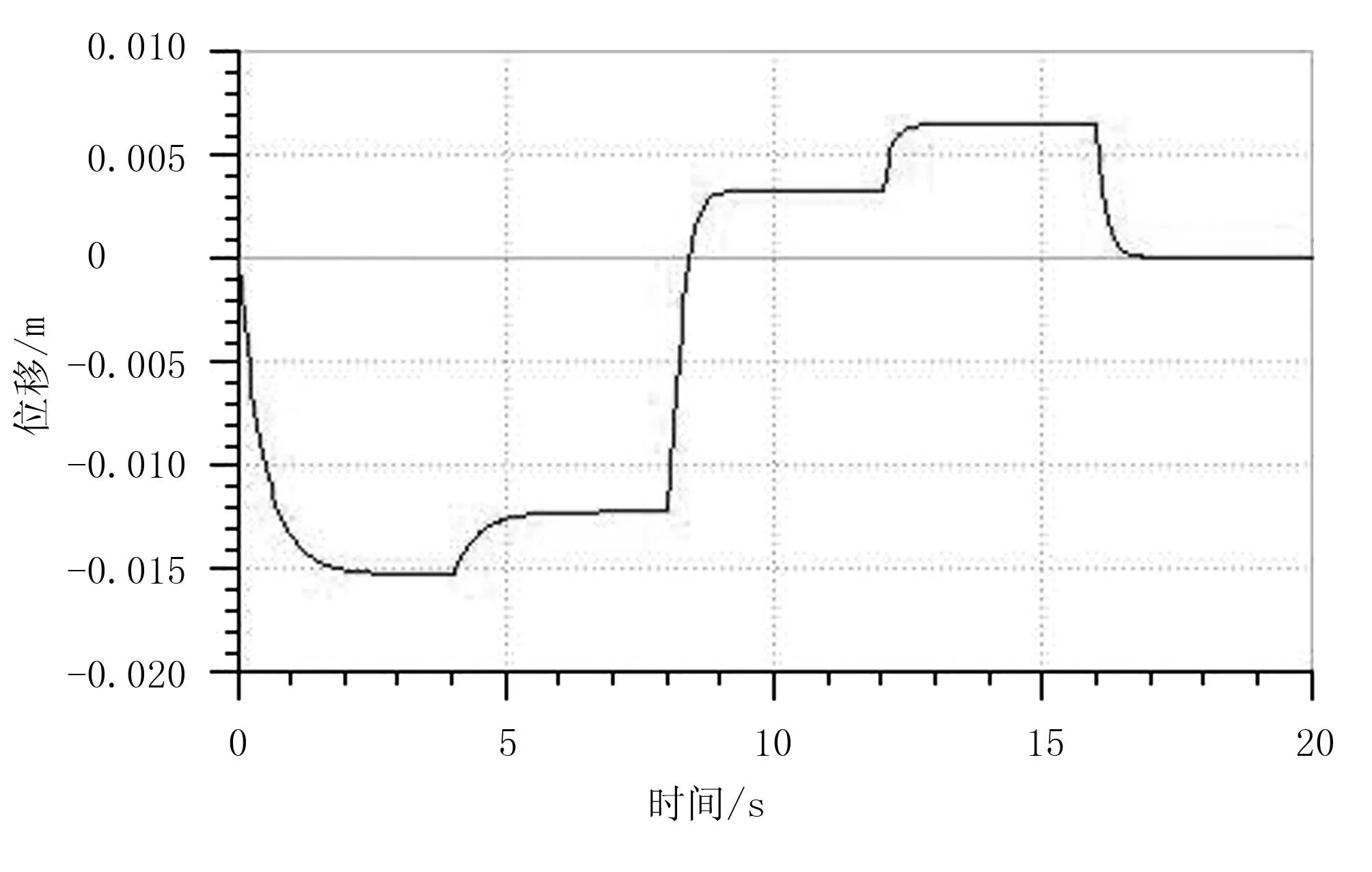
圖7 實際位移與期望位移之差曲線(Ps=150bar)
當供油壓力Ps=170bar時,液壓缸活塞桿實際位移和期望位移曲線如圖8所示,實際位移和期望位移之差曲線如圖9所示。此時系統的穩態誤差和動態誤跟蹤誤差都滿足性能指標要求。
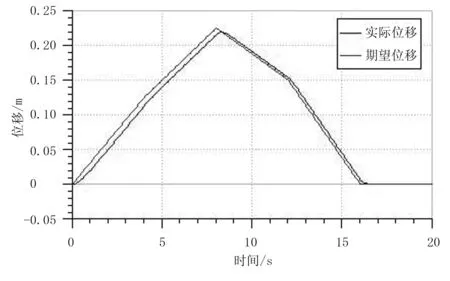
圖8 實際位移與期望位移曲線(Ps=170bar)
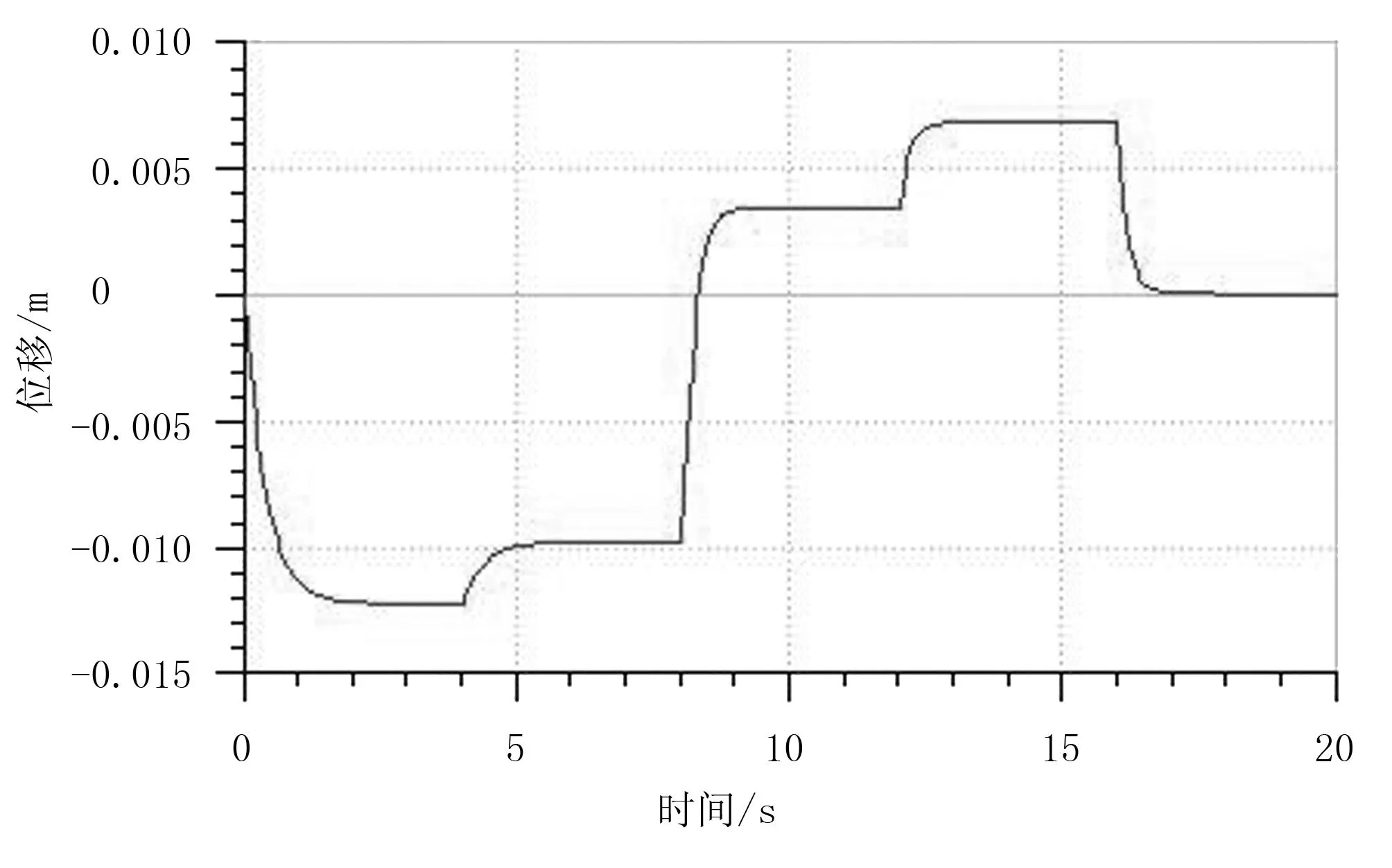
圖9 實際位移與期望位移之差曲線(Ps=170bar)
調節供油壓力PS的值,得到滿足系統性能指標的供油壓力在180bar左右。在這個值附近,位置跟蹤系統具有較好的閉環跟蹤效果。經過反復調試分析得出:PS值越大,響應速度越快,動態跟蹤誤差越小;但當PS值過大,其值大于620bar時,運行12s后,跟隨曲線出現超調,系統存在明顯的振蕩,系統不穩定。
3.2.2液壓流量的影響
在液壓系統仿真模型中,通過調節電機和泵的轉速、泵的排量或液壓閥的流量來改變供給液壓缸的液壓流量的大小,觀察液壓缸活塞桿的實際輸出位移與所給定的期望值之差,找到滿足性能要求的液壓流量范圍。
當液壓流量q=8.55L/min時,液壓缸活塞桿實際位移和期望位移曲線如圖10所示,實際位移和期望位移之差曲線如圖11所示。由此可知,此時系統的穩態誤差是滿足要求的;但動態誤跟蹤差超過了0.012 5m,不滿足性能指標要求。
當液壓流量q=9.50L/min時,液壓缸活塞桿實際位移和期望位移曲線如圖12所示,實際位移和期望位移之差曲線如圖13所示。此時系統的穩態誤差和動態誤跟蹤誤差都滿足性能指標要求。
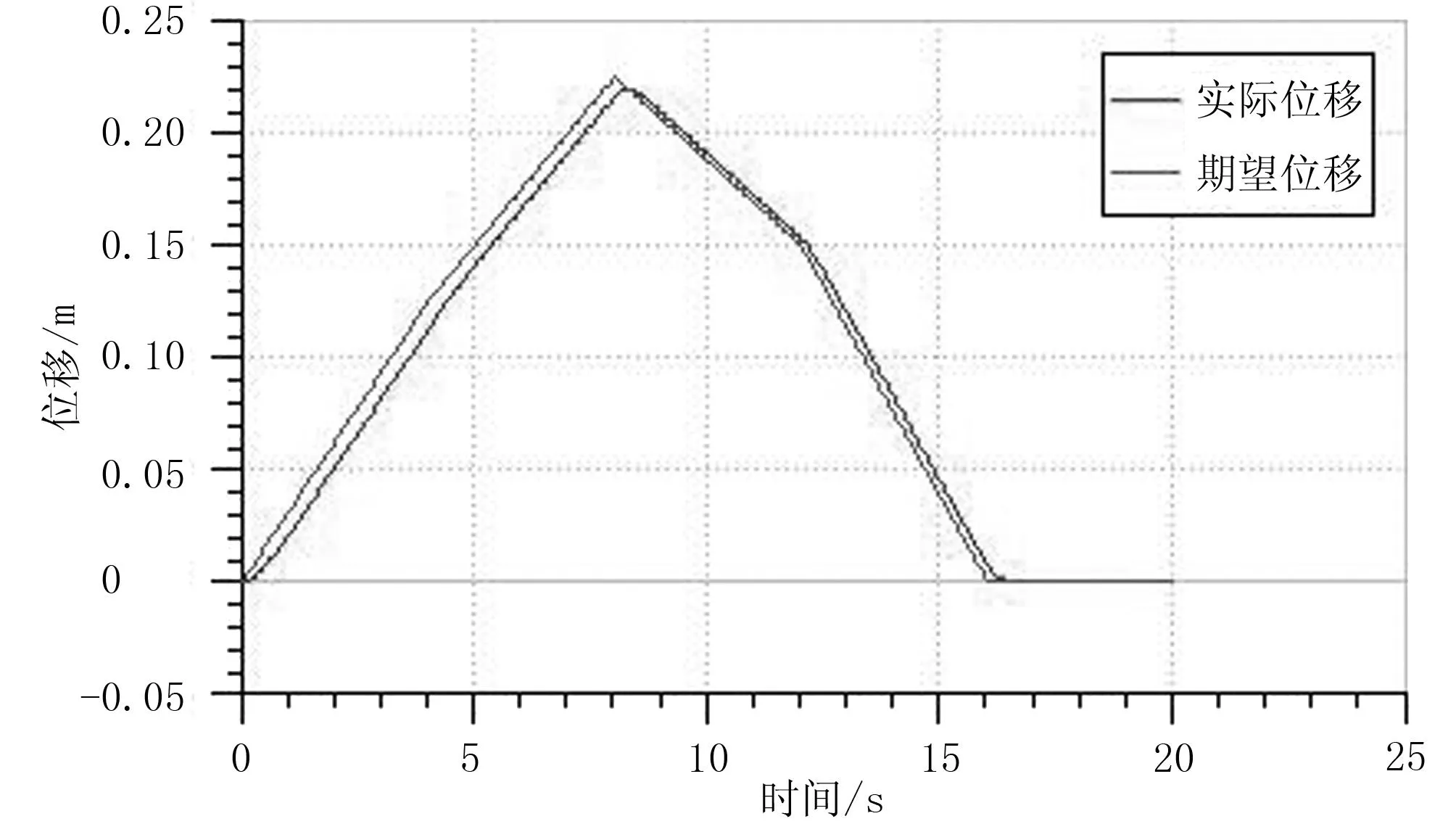
圖10 實際位移與期望位移曲線(q=8.55L/min)
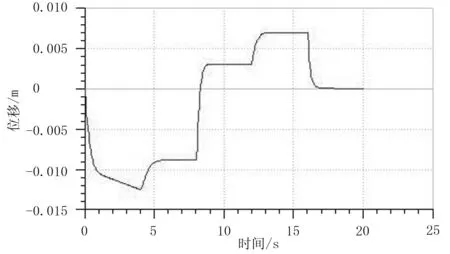
圖11 實際位移與期望位移之差曲線(q=8.55L/min)
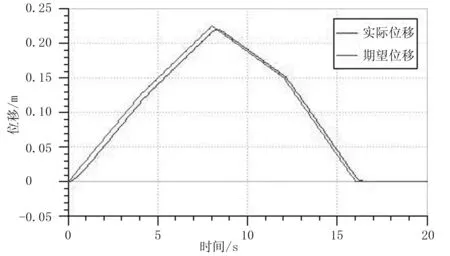
圖12 實際位移與期望位移曲線(q=9.50L/min)
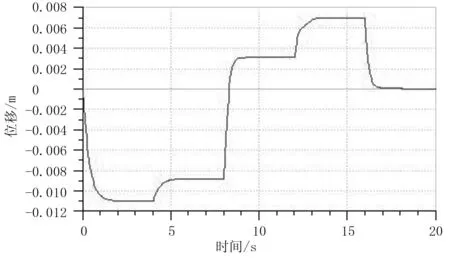
圖13 實際位移與期望位移之差曲線(q=9.50L/min)
調節液壓流量q的值,得到滿足系統性能指標的供油壓力在12.50L/min左右。在這個值附近,位置跟蹤系統具有較好的閉環跟蹤效果。經過反復調試分析得出:q值越大,響應速度越快,動態跟蹤誤差越小;但當q值過大,其值大于60.00L/min時,運行12s后,跟隨曲線出現超調,系統存在明顯的振蕩,系統不穩定。
4臺架試驗
4.1試驗指標
由分析可知,甜菜收獲機自動對行系統的動態跟蹤誤差和穩態誤差越小,系統的靈敏性和穩定性就越好,而此時系統的反應時間也越小。所以,本文采用系統反應時間作為衡量系統性能的指標。
反應時間指甜菜機械化收獲自動對行系統從檢測到甜菜塊根偏離到完成糾偏所需要的時間,計算公式為
T=T1+T2+T3
(11)
式中T—自動對行系統反應時間(s);
T1—偏離信號檢測系統信號提取時間(s);
T2—信號處理控制系統處理時間(s);
T3—液壓糾偏執行系統動作時間(s)。
反應時間體現了系統的靈敏性,在T1和T2相對固定的情況下,通過減小液壓糾偏執行系統動作時間T3來減小系統反應時間,提高系統靈敏性。
4.2試驗設備和儀器
試驗所用設備主要有4LT-A型甜菜聯合收獲機、4LTSYT-A型甜菜機械化收獲自動對行實驗臺和約翰迪爾1054型拖拉機。
主要器材有:卷尺(量程5m,精度1mm)、福祿克931型轉速計(量程1~19 999r/min,精度±0.02%讀數+1個字)、科學計算器、福祿克190-102型示波器(2通道,帶寬100MHz,垂直分辨率8bit,最大實時采樣速率1.25GS/s,每通道27 500點的記錄長度)、BM902型萬用表。試驗時用蘿卜代替甜菜塊根。
4.3試驗方法
試驗時,4LTSYT-A型甜菜機械化收獲自動對行實驗臺放置在4LT-A型甜菜聯合收獲機的挖掘機構和偏離信號檢測機構的下方,動力由控制箱控制變頻電機提供。4LT-A型甜菜聯合收獲機由約翰迪爾1054型拖拉機牽引并提供動力給液壓站,具體位置關系如圖14所示。
為了測量系統反應時間,將偏離信號檢測系統的傳感器和前轉向機構反饋傳感器分別接入到示波器的藍、紅兩通道,如圖15所示。通過抓取分析兩傳感器的波形,測量出自動對行系統的反應時間。

圖14 收獲機和實驗臺位置關系圖

(a) (b)
通過調節拖拉機油門的大小和液壓電磁閥的溢流閥泄油壓力來改變液壓流量和供油壓力,如圖16所示。

圖16 供油壓力、流量調節
試驗時待其他控制因素各參數值穩定時,再進行測量及數據采集;每個因素水平重復試驗3次,分別測定每次反應時間。
4.4試驗結果與分析
試驗結果如表3、表4和圖17、圖18所示。
由圖17可知:反應時間隨液壓流量的增加而先減少后增加。液壓流量在一定的范圍內增加,液壓糾偏執行機構運動同樣距離的時間減小,自動對行速度快,所以反應時間減小;但當液壓流量增加到一定程度,超過了系統所需要的流量后,由于液壓缸的運動過快,液壓糾偏執行機構就會出現超調,導致往復振動,所以系統反應時間會先減小后增加。在流量為25L/min時,反應時間最小。
由圖18可知:反應時間隨供油壓力的增加也呈現先減少后增加的趨勢。供油壓力在小于最佳值的范圍內增加時,液壓糾偏執行機構克服運動阻力的能力增強,達到最大阻力值的時間減小,所以反應時間減小;但當供油壓力增加到一定程度,超過了最佳的供油壓力后,由于壓力過大,液壓糾偏執行機構就會出現振動,所以系統反應時間會先減小后增加。在壓力為18MPa時,反應時間最小。
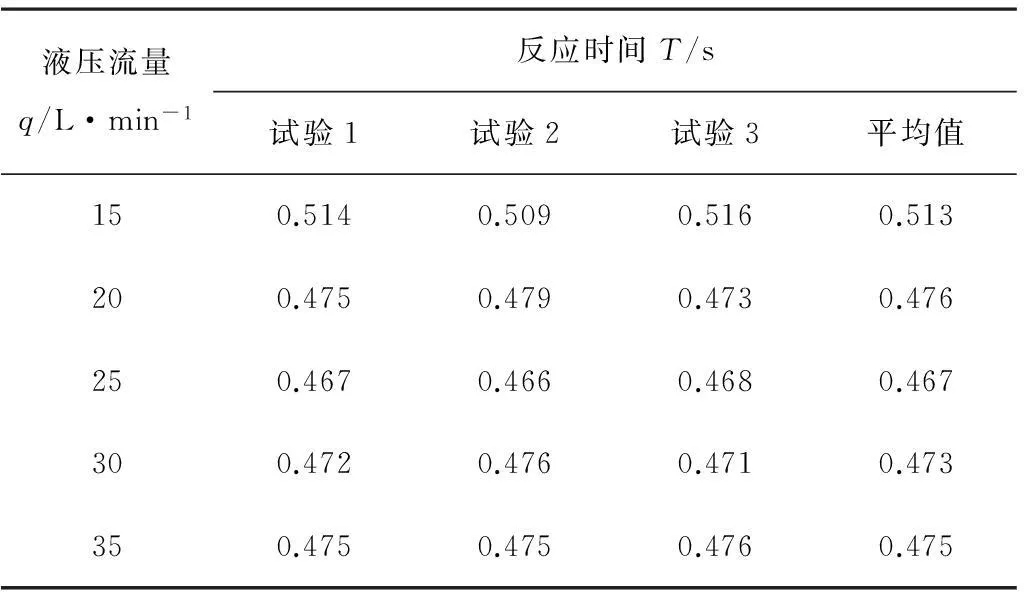
表3 液壓流量試驗結果
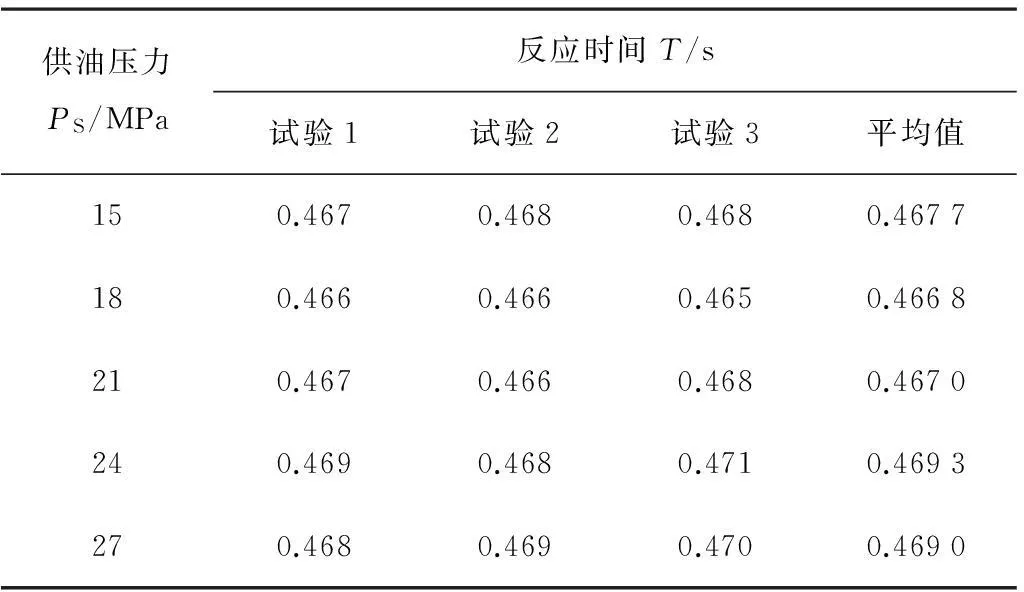
表4 供油壓力試驗結果
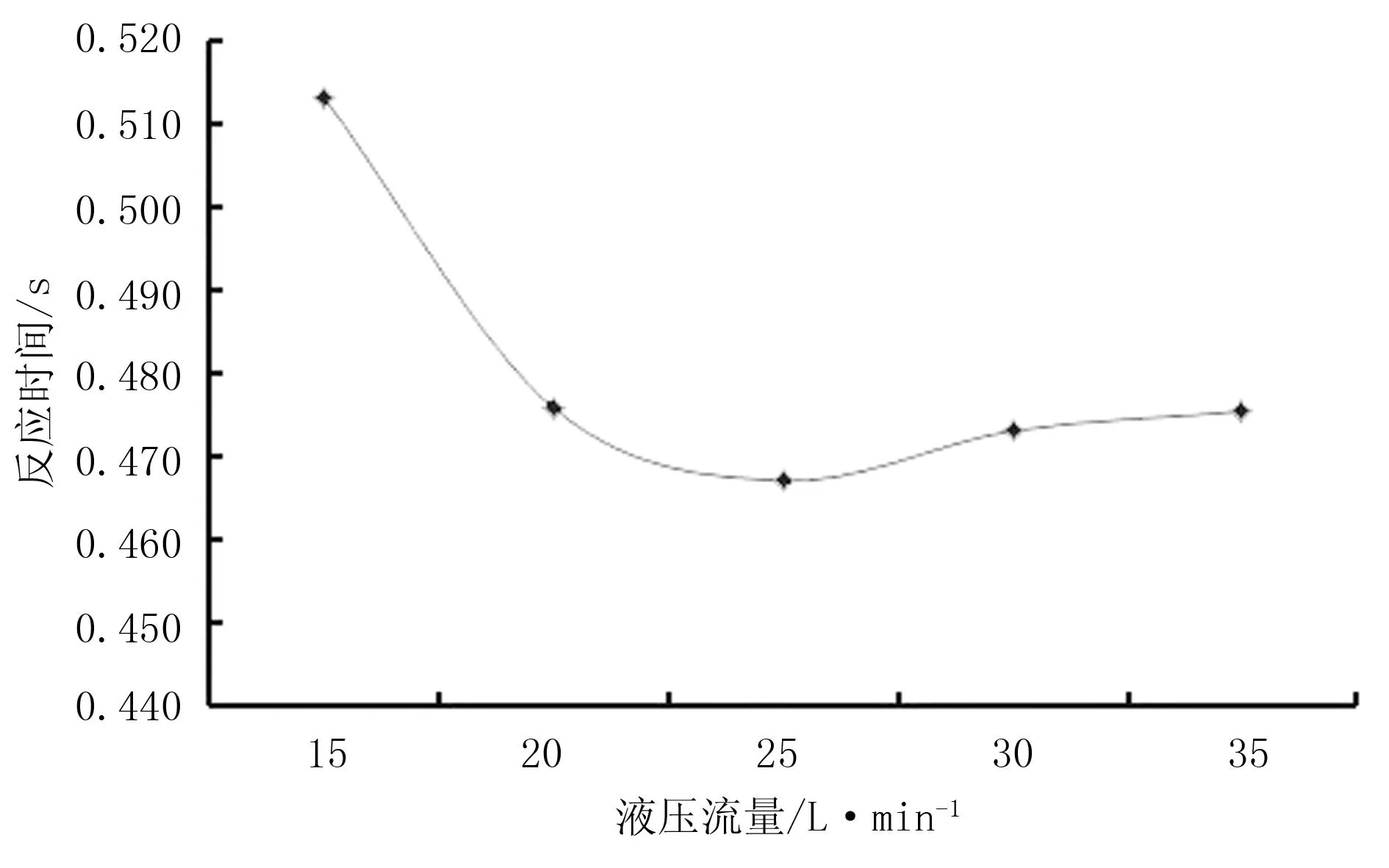
圖17 液壓流量對反應時間的影響
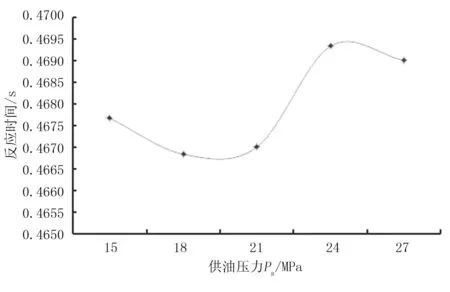
圖18 供油壓力對反應時間的影響
5結論
1)設計了自動對行液壓糾偏執行系統的結構,確定了系統的工作原理,并確定了液壓元器件的結構和工作參數。
2)應用AMESim軟件對自動對行液壓糾偏執行系統進行了建模與仿真,并從液壓流量和供油壓力兩個方面對系統進行了動態響應特性分析,確定了壓力和流量的取值范圍。在仿真的基礎上進行了臺架試驗,得出了壓力和流量對性能指標的影響趨勢和最佳值。
參考文獻:
[1]胡志超,彭寶良,尹文慶,等. 多功能根莖類作物聯合收獲機設計與試驗[J].農業機械學報,2008,39(8):58-61.
[2]王申瑩,胡志超,張會娟,等. 國內外甜菜生產與機械化收獲分析[J].中國農機化學報,2013,34(3):20-25.
[3]王建楠,胡志超,彭寶良,等.國內外甜菜全程機械化生產現狀與趨勢[J].農業機械,2009(6):60-62.
[4]王申瑩,胡志超,彭寶良,等. 基于ADAMS的甜菜收獲機自動對行探測機構仿真[J].農業機械學報,2013, 44(12):62-67.
[5]王申瑩,胡志超,吳惠昌,等. 基于Proteus的甜菜收獲機自動對行控制系統設計與仿真試驗[J].中國農機化學報,2014,35(3):35-10.
[6]成大先.機械設計手冊[K].北京:化學工業出版社,2004.
[7]張利平.液壓控制系統及設計[M].北京:化學工業出版社,2006.
[8]付永領,齊海濤. LMS Imagine.Lab AMESim 系統建模和仿真實例教程[M].北京:北京航空航天大學出版社,2010.7.
[9]王國慶.工程機械機電液系統動態仿真[M].北京:人民交通出版社,2009.
[10]高欽和,龍勇,馬長林,等.機電液一體化系統建模與仿真技術[M].北京:電子工業出版社,2012.5.
[11]尹彥章,王玉林,張魯鄒,等.基于AMESim的中型挖掘機執行機構液壓系統建模與仿真[J].山東理工大學學報:自然科學版,2012,26(5):67-71.
[12]郭占正,苑士華,荊崇波,等.基于AMESim 的液壓機械無級傳動換段過程建模與仿真[J].農業工程學報,2009,25(10):86-91.
[13]李勝,宋大鳳,曾小華,等.重型卡車輪轂馬達液壓驅動系統建模與仿真[J].農業機械學報,2012,43(4):10-14.
[14]孟愛紅,王治中,宋健,等.汽車ESP 液壓控制單元關鍵部件建模與系統仿真[J].農業機械學報, 2013,44(2):1-5.
[15]朱小晶,權龍,王新中,等.大型礦用正鏟液壓挖掘機水平推壓特性聯合仿真[J].農業機械學報,2011,42(5):10-14.
Design and Test of Hydraulic Correction Execution System in Automated Row-followed for Beet Harvester
Wang Shenying, Hu Zhichao, Wu Huichang, Peng Baoliang, Xie Huanxiong, Gu Fengwei
(Nanjing Research Institute of Agricultural Mechanization, Ministry of Agriculture, Nanjing 210014,China)
Abstract:As the degree of integration of electro-hydraulic in agricultural machinery and equipment performance continues to improve, Beet harvester has gradually developed to automate intelligent direction.This paper designed the overall structure of hydraulic correction execution system in automated row-followed for beet harvester, and established the system works principle. It also determined the main structure and operating parameters of hydraulic components by designing, calculating and analysising.The paper did system modeling and simulation and dynamic response analysis on the application of software AMESim,determined the range of hydraulic flow and pressure. It designed physical prototype of the system and did bench test,and concluded the rules and trends of the influence of hydraulic flow and pressure on the system response time.And draw out the best value of hydraulic flow and pressure, that is when the hydraulic flow is 25L/min,oil pressure is 18MPa,the system response time is minimum.
Key words:beet; harvesting machinery; automated row-followed; hydraulic simulation; AMESim
文章編號:1003-188X(2016)03-0155-08
中圖分類號:S225.7+2
文獻標識碼:A
作者簡介:王申瑩(1986-),男,安徽蒙城人,碩士,(E-mail)wangshenying365@163.com。通訊作者:胡志超(1963-),男,陜西藍田人,研究員,博士生導師,博士,(E-mail)nfzhongzi@163.com。
基金項目:中國農業科學院科技創新工程項目(CMS-ASTIP-201X-NRIAM)
收稿日期:2015-02-10