基于人機(jī)工程的駕駛室舒適性設(shè)計(jì)與仿真研究
2016-03-23 07:38:14王一甲王余銳金立生
農(nóng)機(jī)化研究 2016年12期
關(guān)鍵詞:舒適性
王一甲,王余銳,金立生
(1.吉林大學(xué) 交通學(xué)院,長春 130025;2.凱斯紐荷蘭機(jī)械(哈爾濱)有限公司,哈爾濱 150088)
?
基于人機(jī)工程的駕駛室舒適性設(shè)計(jì)與仿真研究
王一甲1,王余銳2,金立生1
(1.吉林大學(xué) 交通學(xué)院,長春130025;2.凱斯紐荷蘭機(jī)械(哈爾濱)有限公司,哈爾濱150088)
摘要:為提高駕駛室舒適性及安全性,以國產(chǎn)某種收獲機(jī)械駕駛室為研究載體,對人機(jī)工程學(xué)理論進(jìn)行研究,結(jié)合中國人體尺寸數(shù)據(jù),對駕駛室進(jìn)行舒適性分析,改進(jìn)其駕駛舒適跨點(diǎn)、駕駛座椅及駕駛操縱裝置,優(yōu)化各器件間布局配置關(guān)系。基于CATIA軟件人機(jī)工程設(shè)計(jì)模塊,對駕駛員駕駛姿態(tài)、操作可達(dá)性和視野范圍進(jìn)行模擬仿真,檢驗(yàn)駕駛室設(shè)計(jì)合理性。對改進(jìn)前后駕駛室舒適性進(jìn)行主觀對比試驗(yàn),結(jié)果表明:隨駕駛時(shí)間增加,駕駛員對兩種駕駛室主觀舒適性皆呈下降趨勢;在0~20min駕駛時(shí)間內(nèi),對于兩種駕駛室平均舒適性評價(jià)一致,在20~60min駕駛時(shí)間內(nèi),改進(jìn)前駕駛室駕駛員疲勞累積趨勢加快;改進(jìn)后的駕駛室總體布局合理,可滿足對駕駛舒適性及安全性需求。該研究證明了人機(jī)仿真系統(tǒng)分析駕駛室舒適程度的可行性,為駕駛室的人機(jī)設(shè)計(jì)改進(jìn)提供了參考依據(jù)。
關(guān)鍵詞:駕駛室;舒適性;人機(jī)工程;收獲機(jī)械;CATIA
0引言
人機(jī)工程學(xué)是研究人—機(jī)—環(huán)境三者之間相互關(guān)系的新興學(xué)科,其應(yīng)用多種理論、方法和測試手段,分析人與系統(tǒng)因素間作用關(guān)系,研究作業(yè)過程中人的生理變化、能量消耗及對環(huán)境適應(yīng)情況,達(dá)到實(shí)現(xiàn)最佳狀態(tài)的目的[1]。駕駛室作為駕駛員操作機(jī)器運(yùn)行的主要控制平臺(tái),是典型的人機(jī)交互環(huán)境系統(tǒng),其設(shè)計(jì)的合理性直接影響駕駛員的工作狀態(tài)與效率。結(jié)合人機(jī)工程學(xué)對駕駛室進(jìn)行優(yōu)化設(shè)計(jì)與配置,在保證作業(yè)效率及安全性的同時(shí)可減少駕駛員體力疲勞和精神負(fù)擔(dān)。
近些年,國內(nèi)外學(xué)者結(jié)合人機(jī)工程理論,將計(jì)算機(jī)輔助設(shè)計(jì)、人體模型仿真分析等先進(jìn)技術(shù)應(yīng)用于駕駛室設(shè)計(jì)中。美國凱斯紐荷蘭公司將多種航空技術(shù)應(yīng)用于駕駛室設(shè)計(jì)中,提高駕駛舒適性及安全性[2]。英國諾丁漢(Nottingham)大學(xué)研制開發(fā)出人機(jī)交互系統(tǒng)軟件SAMMIE,可對駕駛過程中人員狀態(tài)變化進(jìn)行實(shí)時(shí)監(jiān)測,為駕駛室優(yōu)化設(shè)計(jì)提供數(shù)據(jù)參考[3]。西北農(nóng)林大學(xué)對收獲機(jī)械駕駛室進(jìn)行了人機(jī)工程學(xué)設(shè)計(jì),并提出了未來聯(lián)合收獲機(jī)駕駛室的人機(jī)工程研究方向[4]。上述研究多以汽車人機(jī)工程學(xué)為基礎(chǔ)進(jìn)行設(shè)計(jì),無法完全適用于農(nóng)業(yè)裝備駕駛室,具有一定局限性,因此研究適用于農(nóng)業(yè)裝備駕駛室的人機(jī)工程設(shè)計(jì)具有重要意義。
在此背景下,本文以國產(chǎn)某種農(nóng)業(yè)收獲機(jī)械駕駛室為研究載體,對人機(jī)工程學(xué)理論進(jìn)行研究,結(jié)合中國人體尺寸數(shù)據(jù),對駕駛室進(jìn)行舒適性分析,改進(jìn)其駕駛舒適跨點(diǎn)、駕駛座椅及駕駛操縱裝置,優(yōu)化各器件間配置關(guān)系。在此基礎(chǔ)上,運(yùn)用CATIA(Computer Aided Three-dimensional Interactive Application ,計(jì)算機(jī)輔助三維交互應(yīng)用)對駕駛員駕駛姿態(tài)、操作可達(dá)性和視野范圍等狀態(tài)進(jìn)行模擬仿真,并進(jìn)行駕駛對比試驗(yàn)檢驗(yàn)其設(shè)計(jì)合理性,為農(nóng)業(yè)機(jī)械駕駛室的人機(jī)工程設(shè)計(jì)提供重要參考依據(jù)。
1基于人機(jī)工程駕駛室器件開發(fā)設(shè)計(jì)
從駕駛員舒適性角度出發(fā),以人機(jī)工程學(xué)為理論基礎(chǔ),結(jié)合中國人體尺寸數(shù)據(jù),對駕駛室進(jìn)行舒適性分析,改進(jìn)設(shè)計(jì)駕駛舒適跨點(diǎn)、駕駛座椅及駕駛操作裝置。
1.1 駕駛舒適跨點(diǎn)
駕駛舒適跨點(diǎn)是駕駛過程中人體軀干與大腿間交接點(diǎn),是標(biāo)定駕駛室座椅空間尺寸的基準(zhǔn)點(diǎn),其設(shè)計(jì)的合理性直接影響駕駛員坐姿的舒適性、安全性、視野可達(dá)性及手伸界面。本文從人體舒適角度出發(fā),根據(jù)駕駛室座椅設(shè)計(jì)原則,利用數(shù)值規(guī)劃軟件Lingo對駕駛跨點(diǎn)位置進(jìn)行優(yōu)化求解。
以適宜的跨點(diǎn)位置線為基礎(chǔ)進(jìn)行優(yōu)化,定義跨點(diǎn)相對定位參考點(diǎn)的水平方向距離X與跨點(diǎn)的高度Z是為線性關(guān)系。建立模擬駕駛坐姿模型,以腳踵點(diǎn)O為坐標(biāo)原點(diǎn),駕駛室水平地面為X軸,豎直面為Z軸,建立XOZ直角坐標(biāo)系,如圖1(b)所示。根據(jù)實(shí)際駕駛員坐姿疲勞情況,將坐姿模型簡化為人體軀干、大臂、小臂、大腿、小腿、腳踝及手掌等7部分,各部位間夾角以Qi表示(i=1,2,...,9),具體參數(shù)如表1所示。根據(jù)確定舒適駕駛坐姿下的各部位角度范圍[5-7],如圖1(a)所示。

表1 舒適駕駛坐姿各部分角度范圍
設(shè)駕駛舒適跨點(diǎn)坐標(biāo)為(Hx,Hz),利用人體幾何關(guān)系建立跨點(diǎn)求解方程為

其中,θ為腳踵及踝點(diǎn)連線與踏板平面間夾角(°);L1為大腿軸線長度(mm);L2為踝關(guān)節(jié)與腳踵點(diǎn)間距離(mm);L3為踝關(guān)節(jié)與加速踏板平面間距離(mm);L4為小腿軸線長度(mm)。

圖1 駕駛坐姿示意圖
根據(jù)人體統(tǒng)計(jì)學(xué),得到駕駛員(男女)各比例段身體尺寸數(shù)據(jù)[8],應(yīng)用數(shù)值規(guī)劃軟件Lingo確定目標(biāo)函數(shù)和約束條件,優(yōu)化出最適跨點(diǎn)范圍,利用MatLab軟件繪制不同的跨點(diǎn)舒適度范圍曲線,如圖2所示。
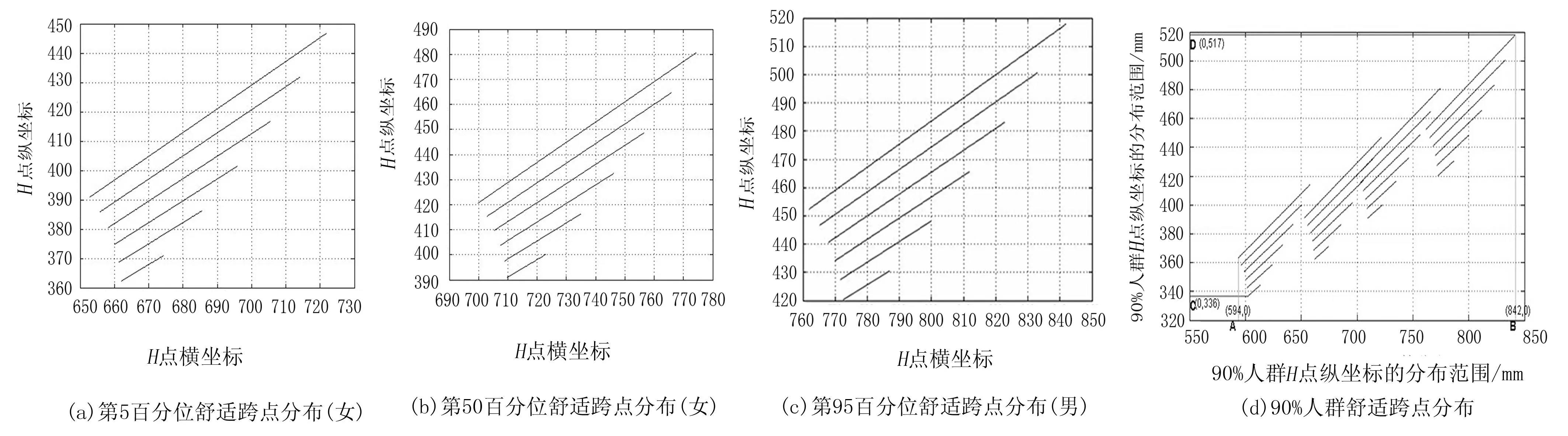
圖2 舒適跨點(diǎn)區(qū)域分布
由圖2可知:影響跨點(diǎn)舒適范圍因素主要為腳踵點(diǎn)位置、不同百分位人體尺寸及座椅靠背傾角。腳踵點(diǎn)位置移動(dòng)及座椅靠背傾角變化,將導(dǎo)致舒適跨點(diǎn)范圍變化;不同百分位人體尺寸間差異,將導(dǎo)致舒適跨點(diǎn)曲線范圍不同。通過整合,得到90%人群舒適跨點(diǎn)的分布范圍,如圖2(d)所示。其中,AB段區(qū)域?yàn)?0%人群跨點(diǎn)橫向位移調(diào)節(jié)范圍;CD段區(qū)域表示90%人群跨點(diǎn)縱向位移調(diào)節(jié)范圍。有利于駕駛員坐姿舒適性的座椅水平調(diào)節(jié)量為230~270mm,豎直調(diào)節(jié)量為170~200mm。
1.2 駕駛室駕駛座椅
舒適駕駛座椅是安全駕駛作業(yè)的首要保證,其座椅的參數(shù)與布置直接影響駕駛員坐姿與視野可達(dá)性,同時(shí)可減小相對振動(dòng)產(chǎn)生的疲勞強(qiáng)度。
根據(jù)人體解剖學(xué)[9],舒適駕駛坐姿應(yīng)保證人體的大部分質(zhì)量有較大支撐面積,單位壓力均布在座椅靠背及椅面上,壓力分布應(yīng)從小到大平滑過渡,避免突變,其壓力變化如圖3所示。根據(jù)人機(jī)工程學(xué)原理,結(jié)合中國人體實(shí)際尺寸分布,主要對駕駛座椅高度、座椅深度、座椅寬度、座面傾角及靠背傾角進(jìn)行分析設(shè)計(jì)。
合適的座椅高度應(yīng)低于小腿高度,保證保持大腿基本水平,大腿、小腿以及臀部皆可獲得地面及椅面支撐。正確的座椅深度應(yīng)可有效承擔(dān)臀部力量,且使靠背方便地支撐腰椎部位,設(shè)計(jì)時(shí)應(yīng)以女性較小百分位尺寸為基準(zhǔn)。座椅寬度應(yīng)較坐姿臀寬稍大,便于駕駛員可自由調(diào)整坐姿,同時(shí)靠背傾角應(yīng)使人體脊柱處于正常狀態(tài)。整體設(shè)計(jì)時(shí),應(yīng)保證座椅椅面材料軟硬適宜,具備一定的耐磨性及防滑性等[10]。

圖3 駕駛座椅各部位受力分布
1.3 駕駛室操縱裝置
駕駛室操縱裝置主要分為手控操縱裝置和腳控操縱裝置兩類。其中,手控操縱裝置包括方向盤、操縱桿等,腳控裝置為離合腳踏板等。合理合計(jì)相關(guān)操縱裝置,可提高手腳操縱靈活性和準(zhǔn)確度,減少駕駛疲勞度,提高駕駛安全性。
1)方向盤。方向盤是駕駛員最重要的控制裝置之一,其設(shè)計(jì)與布置的合理性直接影響駕駛安全性、舒適性及作業(yè)效率。其主要設(shè)計(jì)參數(shù)為方向盤平面與水平面夾角和方向盤的尺寸參數(shù)。
在駕駛過程中,駕駛員對方向盤施加一定的力產(chǎn)生扭矩,從而完成對其操縱。方向盤與水平面夾角與作用力間關(guān)系曲線如圖4(a)所示。分析可知:駕駛員對其作用力隨方向盤與水平面夾角增大而先減小后增大;當(dāng)夾角成90°時(shí),駕駛員作用力值為最小,此時(shí)駕駛員腕關(guān)節(jié)處于最自然狀態(tài),但當(dāng)需要用較大的力操作時(shí)較為費(fèi)勁;當(dāng)夾角成0°時(shí),最方便駕駛員對方向盤進(jìn)行施力,但此時(shí)腕關(guān)節(jié)處于非自然的操縱狀態(tài),操作易疲勞,因此本文將方向盤與水平面夾角選定為15°~70°范圍內(nèi)。參考中國人體坐姿數(shù)據(jù),設(shè)定方向盤直徑為350~380mm,方向盤截面直徑為30~35mm,方向盤三維效果如圖4(b)所示。
2)手操縱桿。駕駛室手操縱桿主要實(shí)現(xiàn)克服較大阻力的操縱,但并不適合于精確調(diào)節(jié)或連續(xù)作業(yè),其主要設(shè)計(jì)參數(shù)為手柄形狀和控制范圍。

圖4 駕駛方向盤
參照人體生理學(xué)特征,對操縱桿手柄形狀及尺寸進(jìn)行設(shè)計(jì),以提高駕駛員操縱的舒適性。人體手掌掌心處肌肉最少且指骨間充滿神經(jīng),為駕駛員最佳減震系統(tǒng),因此手柄不應(yīng)完全貼合掌心,保持一定空間使得振動(dòng)受力無法集中,減少了長時(shí)間操作產(chǎn)生的手部疲勞[11]。圖5為常見的手柄形狀,其中球形手柄適于擺動(dòng)角度大于或等于30°操縱系統(tǒng);錐形和錠子形手柄適于擺動(dòng)角度小于30°操縱系統(tǒng)。本文選取應(yīng)用較廣泛的錠子形手柄為操縱桿端頭。
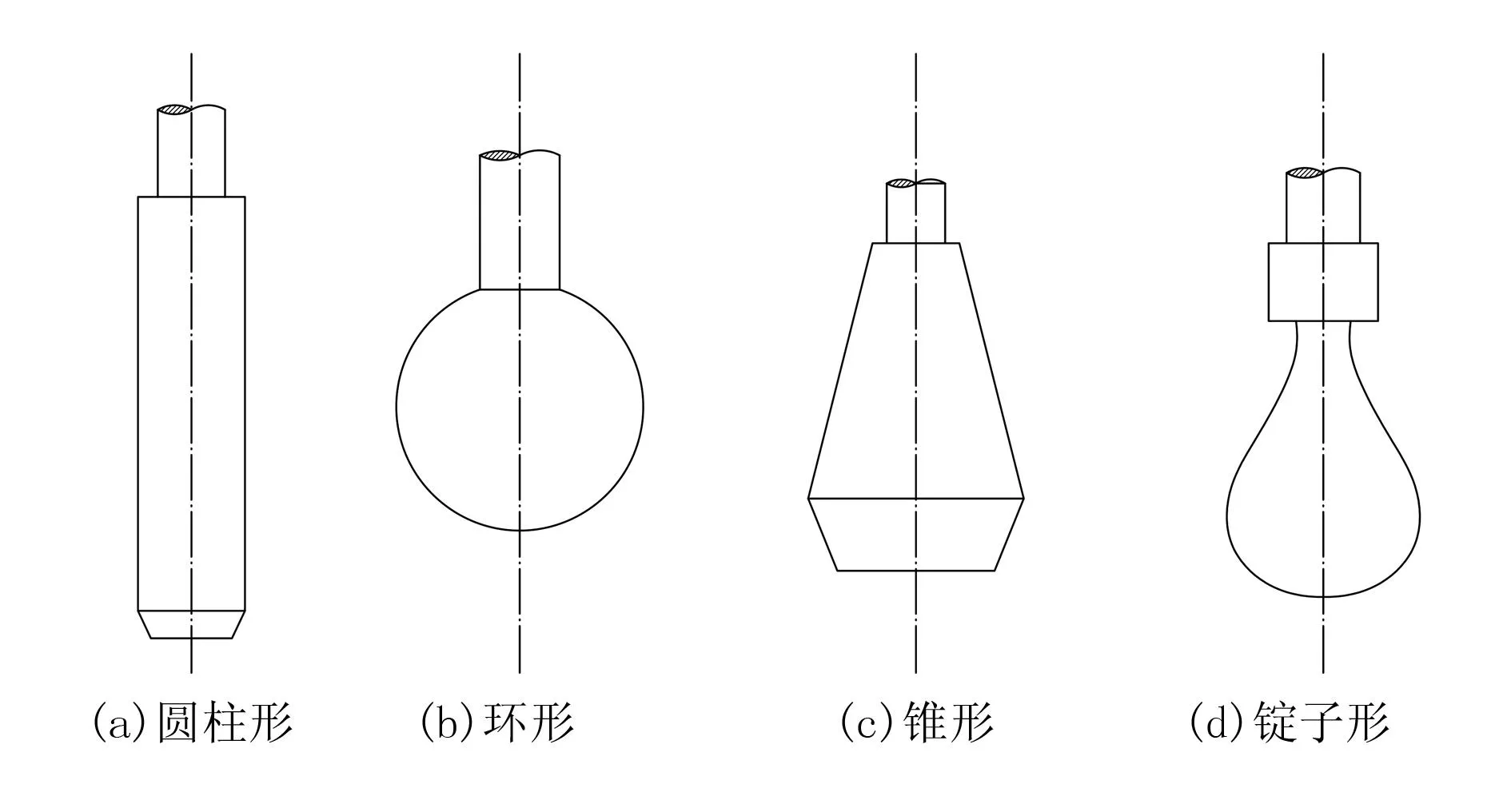
圖5 常見手柄形狀
手操縱桿操縱角度和位移量應(yīng)控制一定范圍內(nèi),操縱范圍過大,將增加駕駛員手臂位移量,加快駕駛疲勞積累。本文設(shè)計(jì)操縱桿控制角度以30°~60°為易,前后角度不宜超過90°,左右角度不宜超過45°;前后位移量不易超過350mm,左右位移量不易超過150mm。操縱范圍如圖6所示。
3)腳控踏板。當(dāng)需要較大作用力進(jìn)行操作,通常采用腳控操縱系統(tǒng)。其中,對于需要較大操縱力、速度快且準(zhǔn)確性高的操作應(yīng)選用右腳。
腳踏板角度是影響腳部施力的重要因素,如圖7所示。適度角度應(yīng)使駕駛員操縱踏觸踏板時(shí),身體下肢及腳踝關(guān)節(jié)處于舒適狀態(tài)[12],其計(jì)算值為
θ=78.96-0.015Z-0.000173Z2
(2)
其中,Z為拇指基準(zhǔn)點(diǎn)到踵點(diǎn)水平距離(mm)。

圖7 踏平面角度關(guān)系
2駕駛室總體布局設(shè)計(jì)
駕駛室作業(yè)空間設(shè)計(jì)主要是駕駛員在坐姿狀態(tài)下,對駕駛室內(nèi)座椅和控制器件進(jìn)行總體配置,保證駕駛安全性及作業(yè)效率,同時(shí)提高駕駛員舒適性,減少駕駛疲勞積累。
2.1 駕駛室內(nèi)部器件布置
1)手伸界面布置。駕駛員手伸界面是在正常姿勢駕駛過程中,駕駛員身系安全帶,右腳置于加速踏板上,雙手握住方向盤,當(dāng)進(jìn)行其他操縱時(shí)雙手所能伸及的最大空間,為操縱封閉曲面球形范圍。為保證駕駛員行車安全,在行車過程中涉及各種操縱件應(yīng)布置在手伸界面范圍內(nèi)。
根據(jù)駕駛員駕駛操作區(qū)域分布,將其分為水平工作區(qū)域、垂直工作區(qū)域及二者構(gòu)成的立體封閉工作區(qū)域,如圖8所示。其中,“1”為上肢操作最佳范圍,適宜配置使用頻繁器件,如倒車系統(tǒng)、換擋系統(tǒng)及點(diǎn)火系統(tǒng)等;“2”為上肢操作較易范圍,適宜配置使用較頻器件;“3”為上肢操可達(dá)到最大范圍,適宜配置使用不頻繁器件。
2)方向盤布置。方向盤布置主要考慮兩方面影響:一是最下緣同座椅間距離,保證人體腹部包絡(luò)曲面與方向盤最下緣無法發(fā)生干涉現(xiàn)象;另一方面對方向盤平面同水平面夾角進(jìn)行考慮,保證方向盤最上緣無法遮擋駕駛員下視野。
根據(jù)經(jīng)驗(yàn)推薦的合理數(shù)值范圍,設(shè)計(jì)駕駛室座椅與方向盤下緣間水平距離L1在300~400mm范圍內(nèi),垂直距離H1應(yīng)大于230mm。同時(shí),方向盤上緣不能進(jìn)入駕駛員的前方視野,前下視野角度用α來表示,其取值范圍為10°~18°,如圖9所示。

圖8 作業(yè)空間的尺寸
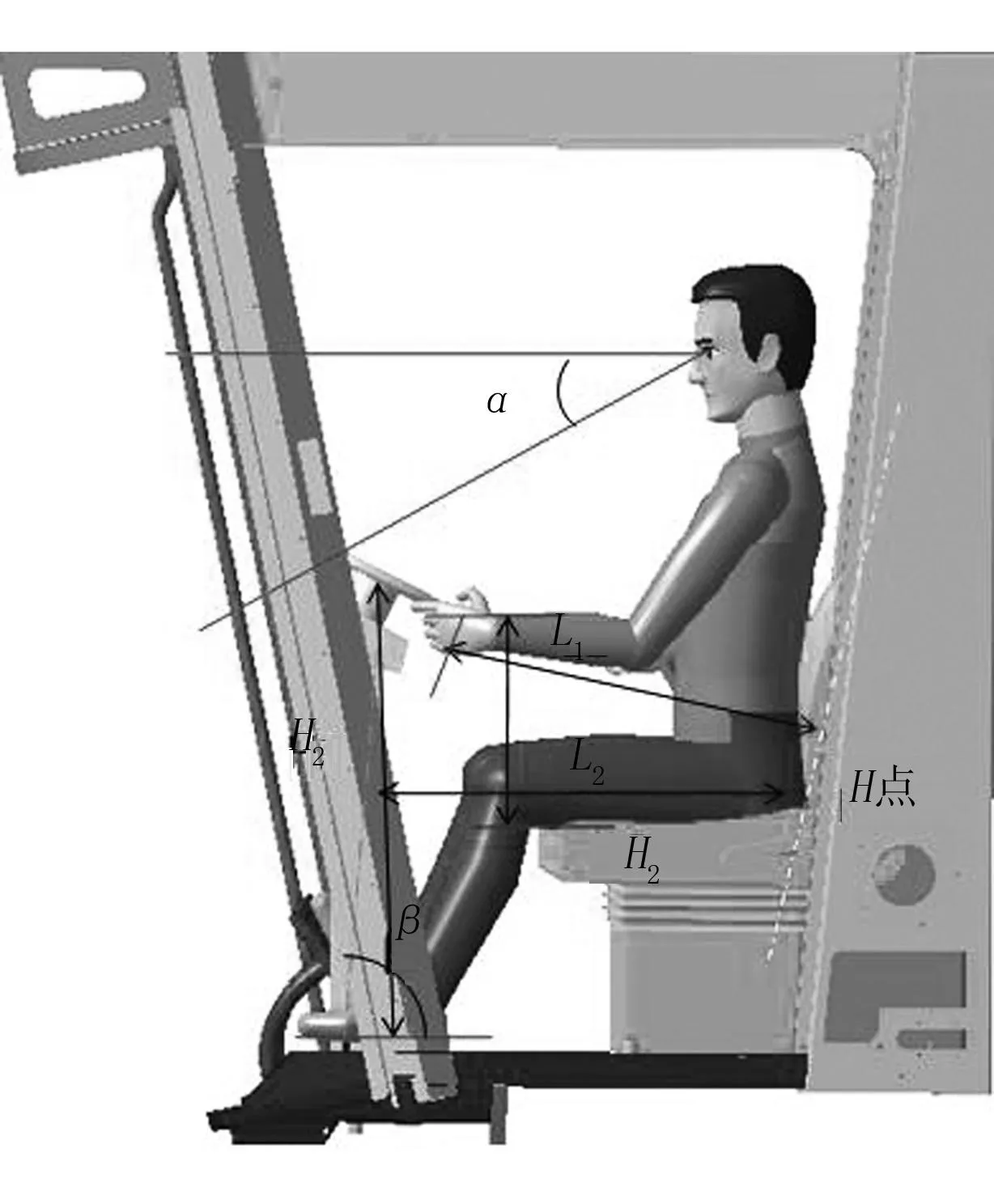
圖9 方向盤布置
2.2 駕駛室整體布置
綜合上述研究分析,本文設(shè)定腳踏板位置距座椅跨點(diǎn)距離為720mm,大小身材皆可通過調(diào)節(jié)座椅的前后距離來得到踵點(diǎn)到座椅的舒適距離。駕駛室腳控裝置主要包括左腳離合控制器和右腳加速踏板控制器,將其以方向盤的軸線為中心對稱布置,各踏板軸線距方向盤軸線距離為240mm,整體駕駛室布置如圖10所示。

圖10 駕駛室整體配置圖
3虛擬人機(jī)系統(tǒng)舒適性評價(jià)仿真
以CATIA V5R20人機(jī)工程設(shè)計(jì)模塊為研究平臺(tái),通過調(diào)節(jié)駕駛員各種操作狀態(tài)和運(yùn)動(dòng)姿勢,進(jìn)行駕駛室舒適性評價(jià)仿真分析。
3.1 人機(jī)駕駛模擬前處理
采集100個(gè)中國駕駛員相關(guān)數(shù)據(jù)為樣本,以CATIA軟件中人體構(gòu)造模塊為研究平臺(tái),進(jìn)行尺寸數(shù)據(jù)編輯,得到虛擬中國人人體模型,并輸入至姿態(tài)編輯模塊,模擬靜態(tài)駕駛動(dòng)作[13],如圖11所示。

圖11 CATIA前處理模塊
3.2 姿態(tài)分析模擬
進(jìn)行駕駛姿態(tài)仿真分析,建立人體坐姿舒適角度范圍與操縱舒適性間關(guān)系模型,并賦予不同范圍以不同分值,通過虛擬仿真得到各個(gè)作業(yè)狀態(tài)下駕駛員軀干、大腿、小腿、大臂和腳踝關(guān)等部位姿態(tài)評分。通過仿真結(jié)果可知:各部位姿態(tài)分?jǐn)?shù)處于78~100分范圍內(nèi),可滿足人機(jī)工程駕駛舒適性要求。雖人體各個(gè)部位皆非處于最佳狀態(tài),但其整體效果最佳,肘部及腿部姿態(tài)仿真如圖12所示。
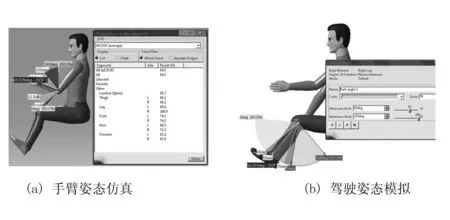
圖12 駕駛員姿態(tài)仿真
3.3 操作駕駛可達(dá)性模擬
進(jìn)行操作駕駛可達(dá)性仿真,設(shè)定人體模型在背部靠緊椅背,僅依靠肩周運(yùn)動(dòng),對其左右手可達(dá)區(qū)域方位進(jìn)行模擬分析,如圖13所示。由仿真結(jié)果可知:右手可達(dá)區(qū)域覆蓋控制裝置右半部分全部及左側(cè)操縱大部,左手可達(dá)區(qū)域覆蓋左側(cè)操縱裝置的大部分和右側(cè)操作小部,且兩側(cè)皆作業(yè)范圍皆足夠覆蓋工作范圍,證明駕駛可達(dá)性效果良好。

圖13 虛擬可達(dá)性仿真
3.4 駕駛員視野區(qū)域模擬
進(jìn)行操作駕駛視野區(qū)域模擬,設(shè)定模型背部與駕駛座椅間固定約束,依靠頸部調(diào)整頭部方向,以控制相關(guān)視野范圍,對駕駛員進(jìn)行平視、視野上下限及左右限模擬,進(jìn)行駕駛員視野仿真,如圖14所示。
分析可知:對于4個(gè)方向駕駛員視野良好,駕駛員視野下限可以掌握整個(gè)方向盤面板及腳踏板、左右視野容納駕駛室兩側(cè)外部情況,證明了駕駛室整體布置的合理性。
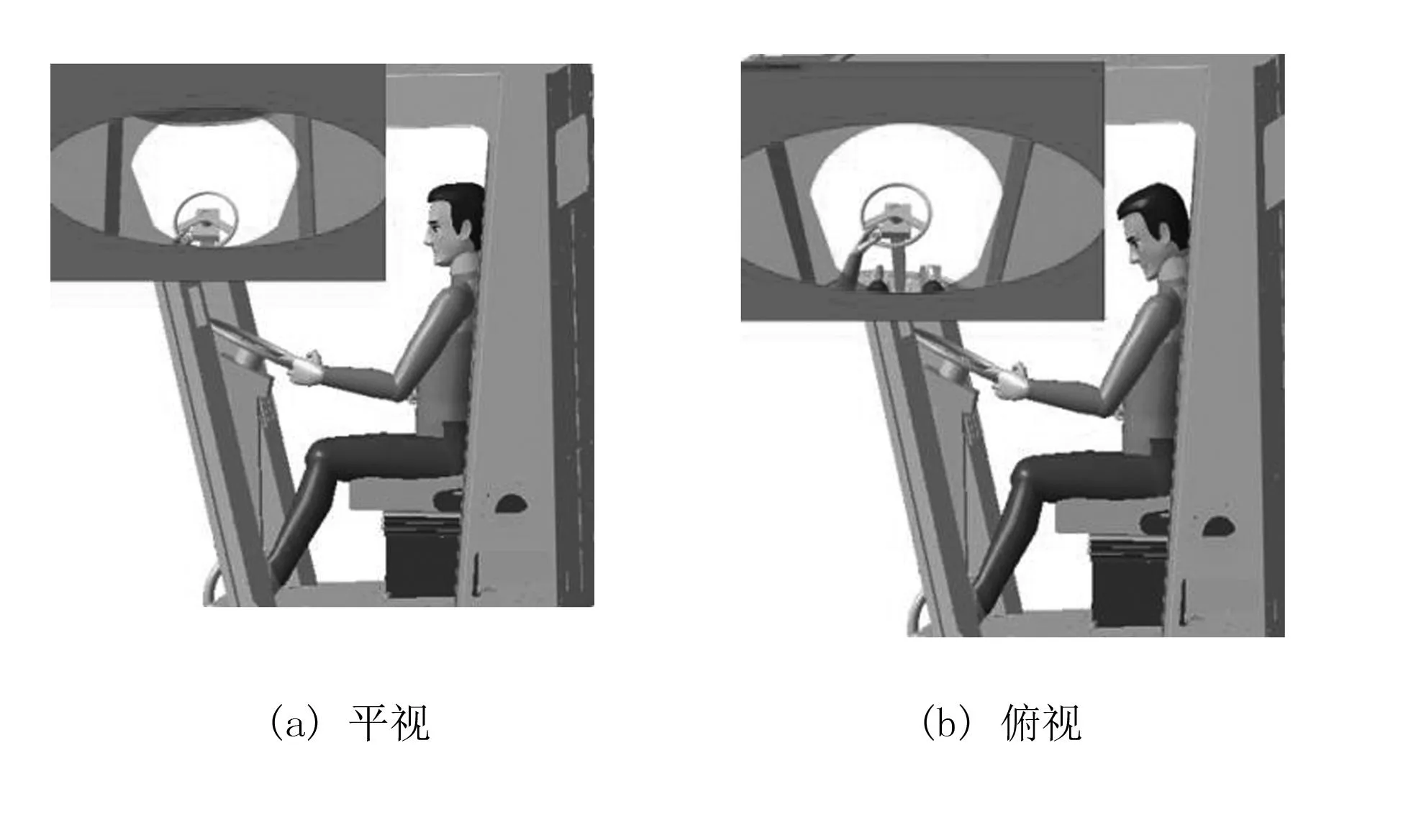

圖14 虛擬視野區(qū)域仿真
4駕駛舒適性對比試驗(yàn)
為檢驗(yàn)駕駛室設(shè)計(jì)合理性及仿真分析可行性,以改進(jìn)前后駕駛室為試驗(yàn)平臺(tái),進(jìn)行駕駛舒適性試驗(yàn)。
4.1 試驗(yàn)對象
為避免年齡與疾病等外部條件對試驗(yàn)結(jié)果影響,分別選取20名男子和20名女子作為試驗(yàn)樣本,年齡31±5.2歲;被測男子身高范圍160~177cm,體重范圍48~75kg;被試女子身高范圍152~166cm,體重范圍42~66kg;皆具有3年以上駕駛經(jīng)驗(yàn)。所有樣本均身體健康,無心腦血管疾病及睡眠充足,且在試驗(yàn)前無疲勞癥狀,情緒穩(wěn)定。駕駛環(huán)境對比如圖15所示。
4.2 試驗(yàn)方案與結(jié)果
測試時(shí)間為2015年9月10日,測試期間氣溫18~25℃。考慮時(shí)間和天氣等因素對試驗(yàn)的影響,選擇天氣晴朗的工作日,試驗(yàn)過程中駕駛室溫度變化不大,對測試結(jié)果不會(huì)產(chǎn)生影響。分別對改進(jìn)前后駕駛室進(jìn)行試驗(yàn)測試,試驗(yàn)前駕駛員靜坐在駕駛室中10min,調(diào)整其駕駛坐姿。駕駛員連續(xù)駕駛60min,駕駛過程中駕駛員控制駕駛室內(nèi)相關(guān)器件(座椅、方向盤、操作桿及腳踏板等),并調(diào)整其最佳視覺角度[14],如圖15所示。

圖15 舒適性對比駕駛試驗(yàn)
測試結(jié)束后,采用被試自我疲勞評價(jià)的方式進(jìn)行疲勞舒適性主觀評測[15]。調(diào)查問卷的駕駛疲勞程度等級劃分為5級:非常舒適、有點(diǎn)舒適、無影響、有點(diǎn)疲勞、非常疲勞。試驗(yàn)中,每個(gè)樣本共填寫7份主觀疲勞調(diào)查問卷,對應(yīng)時(shí)刻為0、10、20、30、40、50、60min。根據(jù)調(diào)查問卷的結(jié)果,求得各個(gè)時(shí)刻對各器件的舒適疲勞度得分的平均值。
具體試驗(yàn)結(jié)果如圖16所示。由圖16可知:隨駕駛時(shí)間增加,駕駛員對兩種駕駛室主觀舒適性皆呈逐漸下降趨勢。在0~20min駕駛時(shí)間內(nèi),對于兩種駕駛室平均舒適性評價(jià)一致;在20~60min駕駛時(shí)間內(nèi),改進(jìn)前駕駛室駕駛員疲勞累積趨勢加快。由此證明,改進(jìn)后駕駛舒適性優(yōu)于改進(jìn)前,駕駛室設(shè)計(jì)布局合理。
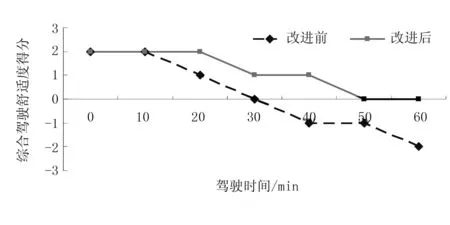
圖16 舒適性程度調(diào)查結(jié)果
5結(jié)論
1)以人機(jī)工程學(xué)為理論基礎(chǔ),結(jié)合中國人體尺寸數(shù)據(jù),對駕駛室進(jìn)行舒適性分析,改進(jìn)設(shè)計(jì)駕駛舒適跨點(diǎn)、駕駛座椅及駕駛操作裝置,優(yōu)化各器件間布置關(guān)系。
2)以CATIA人機(jī)工程設(shè)計(jì)模塊為研究平臺(tái),對駕駛姿態(tài)、操作可達(dá)性和視野范圍進(jìn)行虛擬仿真試驗(yàn),證明了仿真分析駕駛室舒適程度的可行性。
3)對改進(jìn)前后駕駛室舒適性進(jìn)行主觀對比試驗(yàn),結(jié)果表明:隨駕駛時(shí)間增加,駕駛員對兩種駕駛室主觀舒適性皆呈逐漸下降趨勢。在0~20min駕駛時(shí)間內(nèi),對于兩種駕駛室平均舒適性評價(jià)一致;在20~60min駕駛時(shí)間內(nèi),改進(jìn)前駕駛室駕駛員疲勞累積趨勢加快。改進(jìn)的駕駛室總體布局合理,可滿足駕駛員對駕駛室駕駛舒適性及安全性需求。
參考文獻(xiàn):
[1]王余銳.聯(lián)合收割機(jī)駕駛室駕駛舒適性的人機(jī)工程設(shè)計(jì)[D].哈爾濱:東北農(nóng)業(yè)大學(xué), 2012.
[2]孔德剛,張帥,朱振英,等.機(jī)械化播種作業(yè)中駕駛員疲勞分析與評價(jià)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào), 2008,39(8):74-78.
[3]仇瑩,朱忠祥,毛恩榮,等.農(nóng)業(yè)裝備駕駛室虛擬人機(jī)工程學(xué)設(shè)計(jì)與評價(jià)[J].農(nóng)業(yè)工程學(xué)報(bào),2011,27(3): 117-121.
[4]國家技術(shù)監(jiān)督局.GB/T 12985-1991在產(chǎn)品設(shè)計(jì)中應(yīng)用人體尺寸百分位數(shù)的通則[S].北京:中國標(biāo)準(zhǔn)出版社,1991.
[5]鄭艷玲.人機(jī)工程學(xué)在轎車駕駛室設(shè)計(jì)中的應(yīng)用研究[D].長春:長春理工大學(xué), 2008.
[6]國家技術(shù)監(jiān)督局.GB/T 10000-88中國成年人人體尺寸[S].北京:中國標(biāo)準(zhǔn)出版社,1988.
[7]陸劍雄,張福昌,申利民.坐姿與座椅設(shè)計(jì)的人機(jī)工程學(xué)探討[J].人類工學(xué), 2005, 11(4):44-46,49.
[8]國家技術(shù)監(jiān)督局.GB/T 14775-1993效操縱器一般人類功效學(xué)要求[S].北京:中國標(biāo)準(zhǔn)出版社, 1993.
[9]張峻霞,梅飛雪,趙峻芬.CATIA V5人機(jī)工程學(xué)功能及應(yīng)用[J].包裝工程, 2005,26(3):194-196.
[10]王金武, 王余銳. 聯(lián)合收割機(jī)駕駛室駕駛舒適性的人機(jī)工程設(shè)計(jì)[J].東北農(nóng)業(yè)大學(xué)學(xué)報(bào),2014,45(3): 97-103.
[11]中華人民共和國國家質(zhì)量監(jiān)督檢驗(yàn)檢疫總局.GB/T 6235-2004農(nóng)業(yè)拖拉機(jī)駕駛員座位裝置尺寸[S]. 北京:中國標(biāo)準(zhǔn)出版社, 2004.
[12]機(jī)械工業(yè)工程機(jī)械標(biāo)準(zhǔn)化技術(shù)委員會(huì).JB/T 10301-2001土方機(jī)械司機(jī)座椅尺寸和要求[S].北京:機(jī)械科學(xué)研究院,2001.
[13]丁玉蘭.人機(jī)工程學(xué)[M].北京:北京理工大學(xué)出版社, 2005:38-40.
[14]羅仕鑒. 基于生物學(xué)反應(yīng)的駕駛舒適度研究[D]. 杭州:浙江大學(xué),2005.
[15]張祖懷.基于人體生理信號的駕駛疲勞研究方法及其應(yīng)用[D].哈爾濱:哈爾濱工業(yè)大學(xué),2006.
[16]朱燕輝.裝載機(jī)駕駛室人機(jī)界面設(shè)計(jì)研究[D].福州:福州大學(xué),2006.
Comfort Design and Simulation Study of Driving Cab Based on Ergonomics
Wang Yijia1, Wang Yurui2, Jin Lisheng1
(1.College of Transportation, Jilin University, Changchun 130025, China; 2. CASE IN & NEW HOLLAND Machinery (Harbin) Co. Limited, Harbin 150088, China)
Abstract:In order to improve the security and comfort of driving cab, a kind of domestic combine harvester control cab was selected as research carrier, the ergonomics theory was studied, and the comfort of cab was analyzed based on Chinese human dimensions system. The comfortable driving across point, deriving seat and driving control device was designed, and the space-matching relationship of several devices was optimized. And then the driver posture, control panel ability analysis and vision of driver were simulated based on the man machine engineering design module of CATIA software and the rationality of cab designing was tested. The subjective comparative experiment was carried out. Test results showed that with the increase of continuous driving time, the subjective comfort of before and after improvement cabs all had decreasing trends; In the first 20min driving time, the comfort evaluations for these cabs were consistent. In the (20~60)min driving time, the comfort evaluation for before improvement cab had an apparent decline. This paper could prove that using human-machine simulation system to analyze the comfort level of cab was feasible. It also provided the guidance and direction for the research of driving cab.
Key words:cab; comfort; ergonomics; combine harvester; CATIA
中圖分類號:S219.032.9
文獻(xiàn)標(biāo)識碼:A
文章編號:1003-188X(2016)12-0247-07
作者簡介:王一甲(1995-),男,哈爾濱人,本科生,(E-mail)wangyijia1995@163.com。通訊作者:金立生(1975-),男,山東臨朐人,教授,博士生導(dǎo)師,(E-mail)jinlis@jlu.edu.cn。
基金項(xiàng)目:國家自然科學(xué)基金項(xiàng)目(51575229)
收稿日期:2016-01-04
猜你喜歡
福建輕紡(2022年4期)2022-06-01 06:26:06
載人航天(2021年5期)2021-11-20 06:04:36
毛紡科技(2021年8期)2021-10-14 06:51:26
現(xiàn)代儀器與醫(yī)療(2021年2期)2021-07-21 02:19:12
紡織科技進(jìn)展(2021年3期)2021-06-09 08:07:18
建筑熱能通風(fēng)空調(diào)(2018年5期)2018-07-09 03:16:38
池州學(xué)院學(xué)報(bào)(2017年3期)2017-10-16 01:38:35
工業(yè)設(shè)計(jì)(2016年11期)2016-04-16 02:48:02
消費(fèi)者報(bào)道(2016年3期)2016-02-28 19:07:32
汽車實(shí)用技術(shù)(2015年8期)2015-12-26 09:01:02
