基于多路由協議的株間鋤草機器人結構和控制優化設計
2016-03-23 06:00:33江民夏汪小志余良俊
農機化研究 2016年5期
李 偉,江民夏,汪小志,余良俊
(1.江西現代職業技術學院,南昌 330095;2.南昌大學 過程裝備與控制工程系,南昌 330031;3.武漢工程科技學院,武漢 430200)
?
基于多路由協議的株間鋤草機器人結構和控制優化設計
李偉1,江民夏1,汪小志2,余良俊3
(1.江西現代職業技術學院,南昌330095;2.南昌大學 過程裝備與控制工程系,南昌330031;3.武漢工程科技學院,武漢430200)
摘要:為獲得理想的苗間機械鋤草效果,提出了一種新的鋤草機器人結構優化方法。該方法主要采用多目標優化模型對鋤草末端結構進行設計,采用多路由協議對多鋤草機器人進行協同控制,大大提高了田間鋤草機器人的工作效率。在建立了機械鋤草齒運動軌跡數學模型的基礎上,結合現代農藝對機械鋤草參數的限定及要求,建立了多目標優化模型,并利用MatLab優化工具箱得到最優解,將其應用在多機器人系統控制的多路由協議框架中。為了驗證優化方法的有效性,在田間對多鋤草機器人協同作業進行了試驗,結果表明:優化后的多路由鋤草機器人不僅大大提高了作業速度和鋤草效率,而且降低了作物苗損失率,為大型中耕除草機的設計提供了理論依據。
關鍵詞:鋤草機器人;多路由協議;中耕機械;多目標優化;鋤草率
0引言
鋤草工作開始時,鋤草機器人開始采集田間苗草圖像,并將采集到的圖像輸入PC機里。機器人向前運動時,搭載在鋤草機械上的視覺系統動態采集田間苗草圖像并輸入PC機,PC機對圖像處理后可得出刀苗距信息及鋤刀運動情況,進行圖控制系統融合旋轉編碼器和霍爾傳感器的輸入信息,將輸出信息實時傳送給電動機。鋤草機器人在工作時,鋤刀工作同時繞電動機軸旋轉,在旋轉的同時可鏟除雜草,并完成切割。鋤刀控制系統將轉速信息輸出到電動機,從而完成不同位置電動機的轉角控制,使鋤刀轉動1圈時正好停留在相鄰的兩株苗中間;當鋤刀處于苗位置時,苗與豁口正好對齊,避苗完成,其主要控制過程如圖1所示。
由圖1可以看出:在多路由協議的控制下,機器人可以完成協同控制;但是這對于鋤草機器人刀具的要求較高,因此需要對刀具結構進行優化,其優化過程如圖2所示。其基本過程是首先建立刀具的模型,然后利用實際刀具的約束條件,建立多目標優化模型,并利用MatLab對最優解進行求解,最后對刀具進行優化。
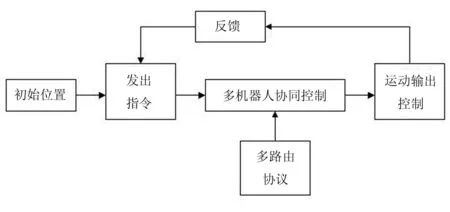
圖1 鋤草機器人控制框圖
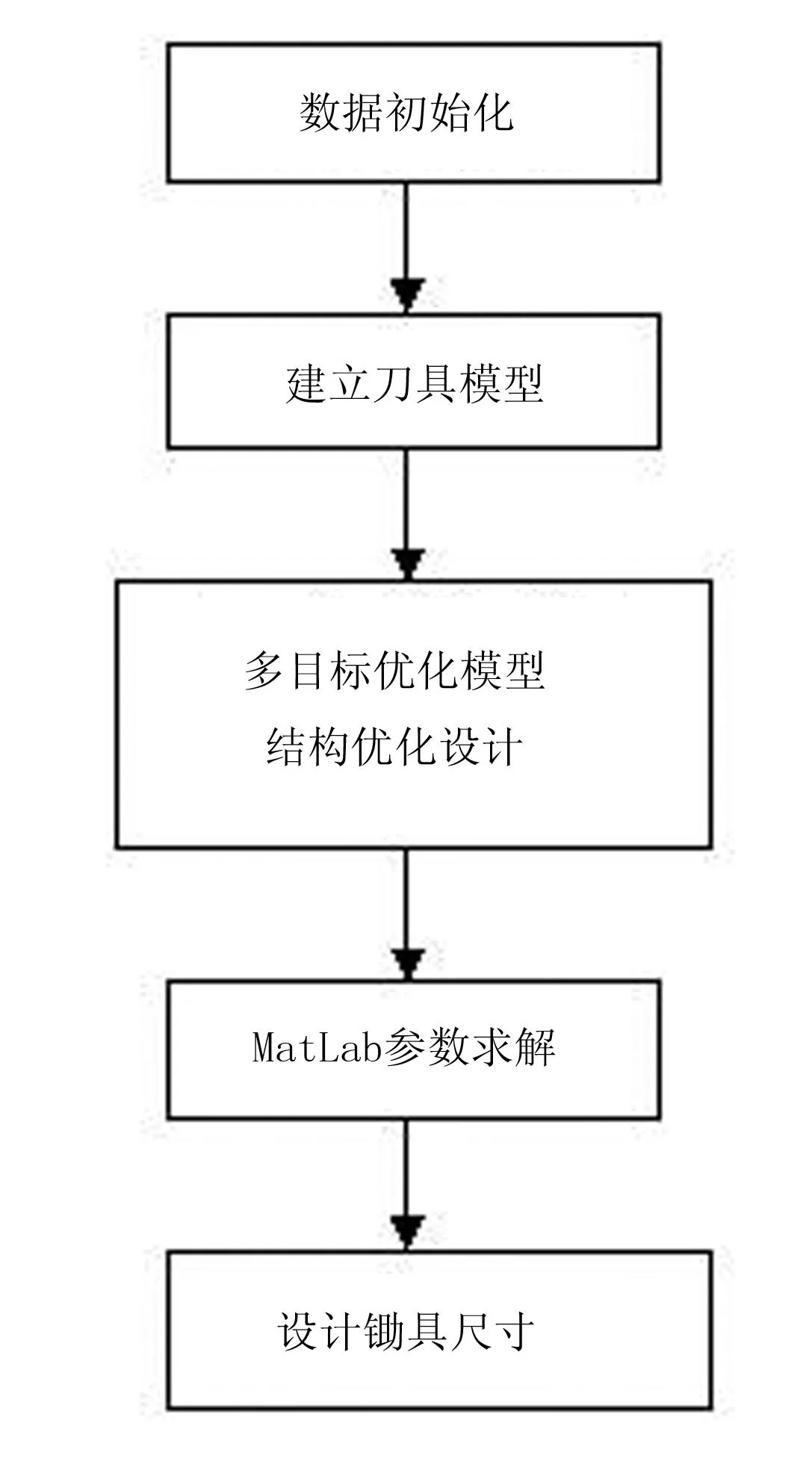
圖2 刀具優化過程示意圖
1鋤草機器人結構設計
鋤草機器人由多種系統組成,包括移動平臺、視覺圖像獲取系統及鋤草機具等。在移動平臺的下方裝有鋤草機具,平臺的上前方裝有獲取圖像的攝像機。如圖3所示,攝像機視場下邊和盤型旋轉鋤刀的旋轉中心正好相對齊。
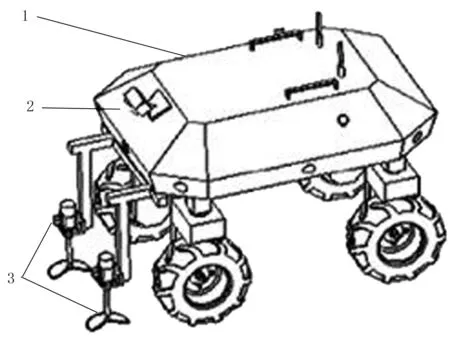
1.移動平臺 2.視覺信息獲取系統 3.鋤草機具
當鋤草機器人在田間工作時,視覺系統將獲取的圖像信息進行分析處理,從而準確獲得鋤刀旋轉中心和菜苗的相對位置;機器人的控制系統依照苗與刀的間距做出準確的鋤刀轉速和轉腳的調整,控制好苗株和鋤刀的相對位置;達到經過每個苗間距時,鋤刀都保證旋轉1周,從而實現鋤草避苗,如圖4所示。
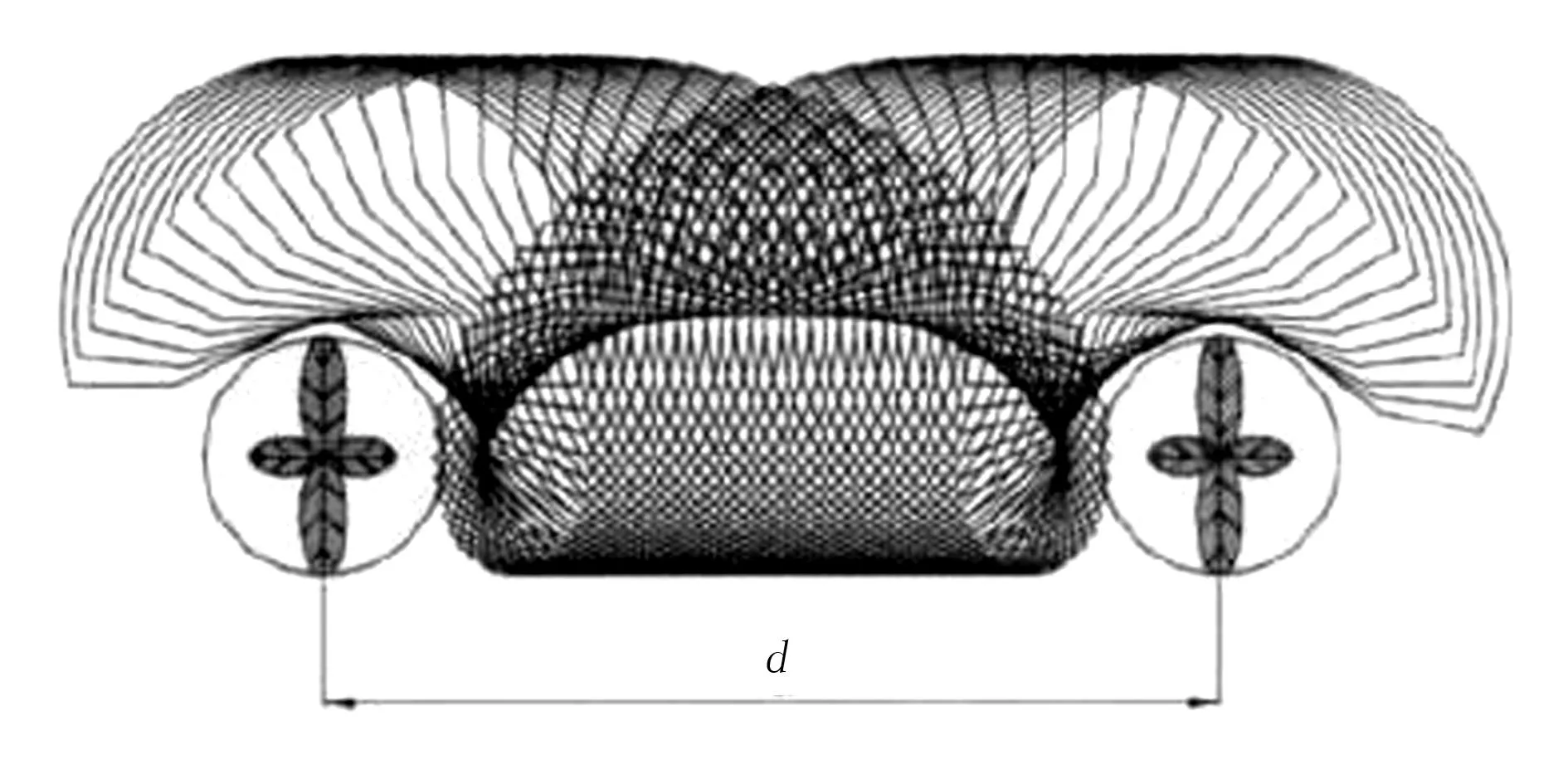
圖4 鋤草刀工作過程仿真
影響鋤草率和傷苗率的主要因素為鋤草刀的結構參數,鋤草率和鋤草作業前后的雜草株數有關,傷草率和完成鋤草后損傷的秧苗株數有關。目前,由于沒有對雜草的生長狀況進行模擬,所以很難得出雜草的株數和損傷的苗株數,因此用覆蓋率和入侵率代替鋤草率和傷苗率作為評價指標。覆蓋率和入侵率是影響鋤草率和傷苗率的關鍵問題。
圖5表示鋤草機器人在苗間鋤草時的示意圖。其中,區域1表示刀具的實際覆蓋區域,區域2表示刀具未覆蓋區域,區域3為防止傷苗的保護帶,對于不同株距的刀具運動如圖6所示。
當株距比200mm小時,刀具在盲區的轉角小于180°;當株距等200mm時,刀具在盲區的轉角等于180°;當株距比200mm大時,刀具在盲區的轉角小于180°。其中,機器人通過車載的DGPS來獲取位置和方向信息,對其軌跡、速度和方向進行控制。
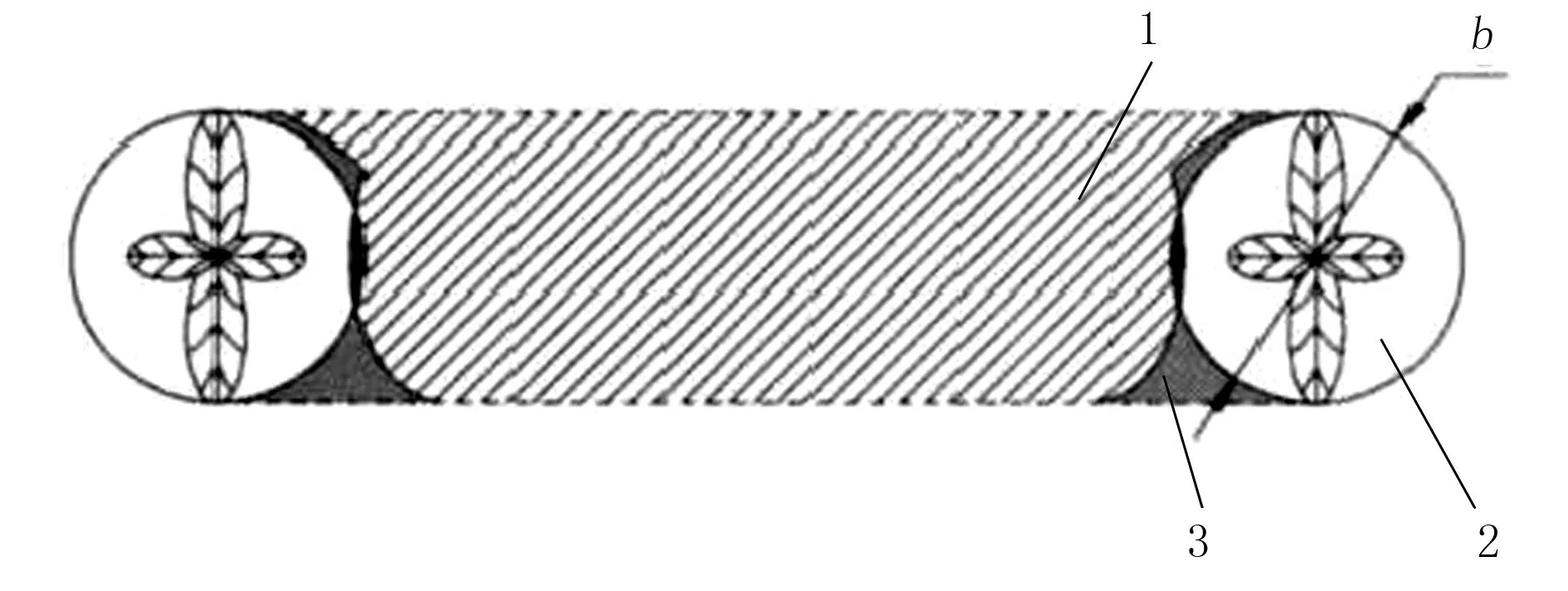
1.區域1 2.區域 3.區域3
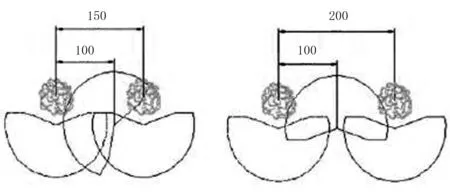
圖6 不同株距刀具運動示意圖
鋤草機器人在田間作業時,可穿越障礙物,實現田間操作的可跨壟行作業,提高了作業效率,如圖7所示。
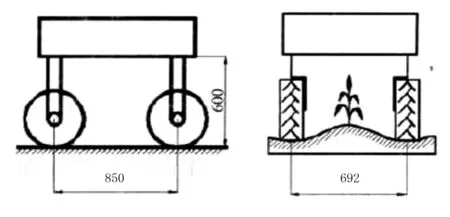
圖7 裝置穿越障礙物示意圖
2鋤具多目標優化設計
以水平旋轉刀具的中心為坐標圓點O,過O點水平方向,機組前進方向為x軸,過O點的垂直方向為y軸,則鋤草機器人末端刀具的擺線方程為
(1)
其中,t為時間,ω為角速度,R表示刀具直徑,Vm表示刀具的前進速度。假設相鄰兩組曲線的相位之差為φ,則刀具平移的曲線方程可表示為
(2)
其中,k為鋤草齒序號。xk可以表示為
(3)
兩個鋤草齒到同一個位置的時間差為
(4)
其中,Z表示齒數,則相鄰兩個鋤草齒的齒跡在x軸方向的間距為
(5)
其中,Vr表示徑向速度。平移曲線與原始曲線交點的橫坐標可表示為
(6)
原始曲線的極坐標為
(7)
將式(6)帶入式(3)可得
(8)
其中,yck表示平移曲線與原始曲線的交點縱坐標,則近似菱形齒跡縱向跨度為
(9)
假設近似菱形齒跡橫向跨度x與理想跨度由20mm的誤差,有
(10)
假設近似菱形齒跡橫向跨度y與理想跨度有1.5Δx的誤差,有
(11)
假設不可用軌跡區間大小為
F3=2R-∑[Δyksign(Δyk-40)sing(55-Δyk)]
(12)
則可以建立多目標優化模型為
(13)
利用MatLab軟件可以求得多目標的最優解,其中求得Vm0=6.28,Z0=16.32,R=163,n=126。根據這些參數,可以對機器人執行末端的結構進行優化。
3多路由鋤草機器人田間測試
為了驗證鋤草末端結構多目標優化和鋤草機器人多路由協同控制的有效性和可靠性,在田間對鋤草機器人的苗間作業進行了試驗研究。通過對多路由多機器人協同控制的作業效果試驗,得到機器人鋤草的效果。多機器人協同工作的示意圖如圖8所示。

圖8 鋤草機器人協同作業
利用多目標優化方法對鋤草機器人的結構進行優化后,可以降低鋤草機器人的傷苗率。其中,通過試驗,得到了普通方法和多目標優化方法得到的鋤草機器人傷苗率對比曲線,如圖9所示。
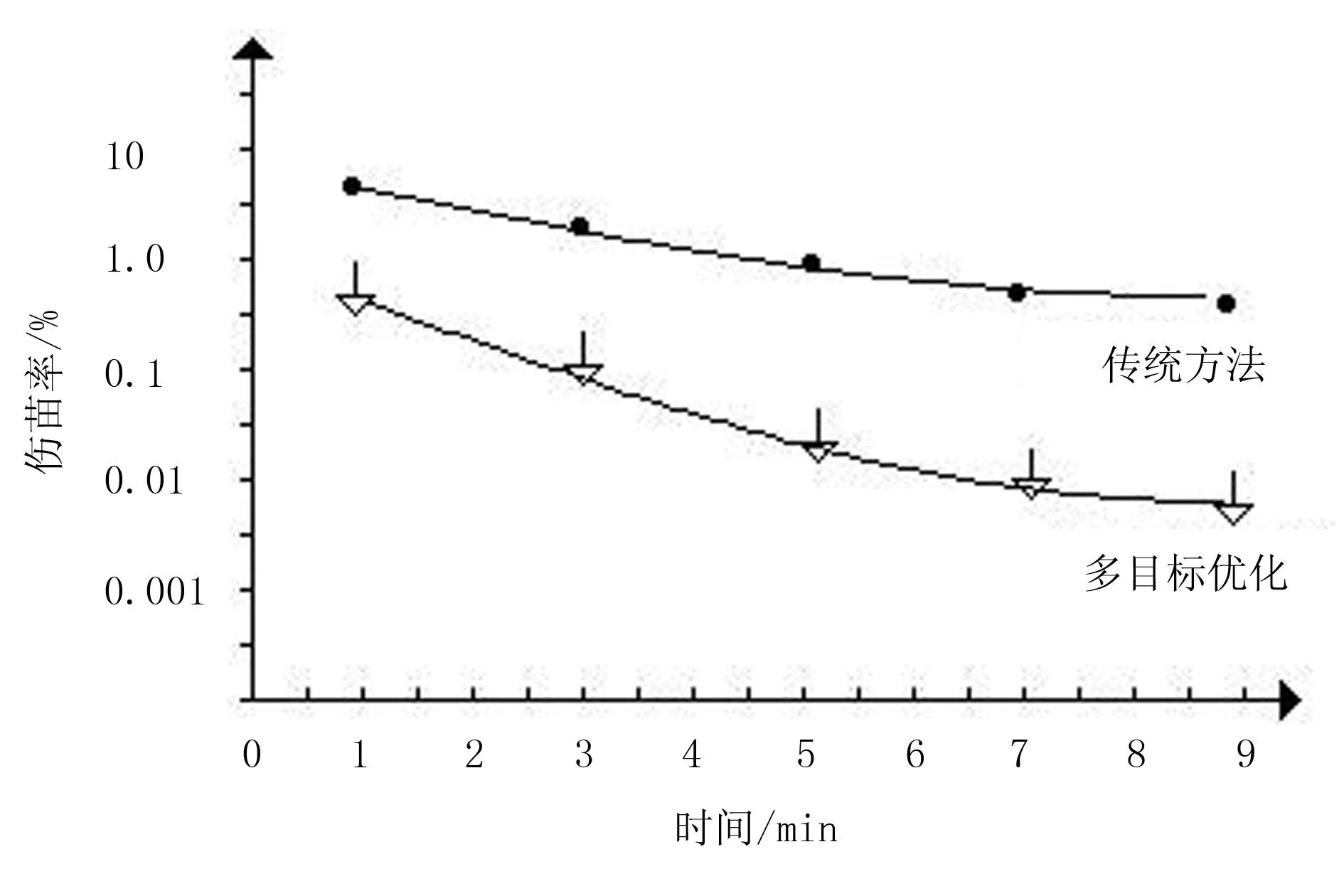
圖9 傷苗率對比曲線
由測試結果可以看出,使用多目標優化方法對鋤草機器人的機構進行優化后,可以大大降低鋤草機器人的傷苗率。
表1表示通過5次測試,得到的田間鋤草時間的對比結果。由表1可以看出:使用多路由鋤草機器人對可以有效的提高鋤草的速度,并且鋤草速度變化比較平穩。
表2表示通過5次測試,得到的鋤草率的對比結果。由表2可以看出:使用多路由鋤草機器人對可以有效的提高鋤草率,從而驗證了機器人多路由協同控制方法在鋤草效果上的優勢,為現代自動化鋤草裝備的設計提供了技術參考。
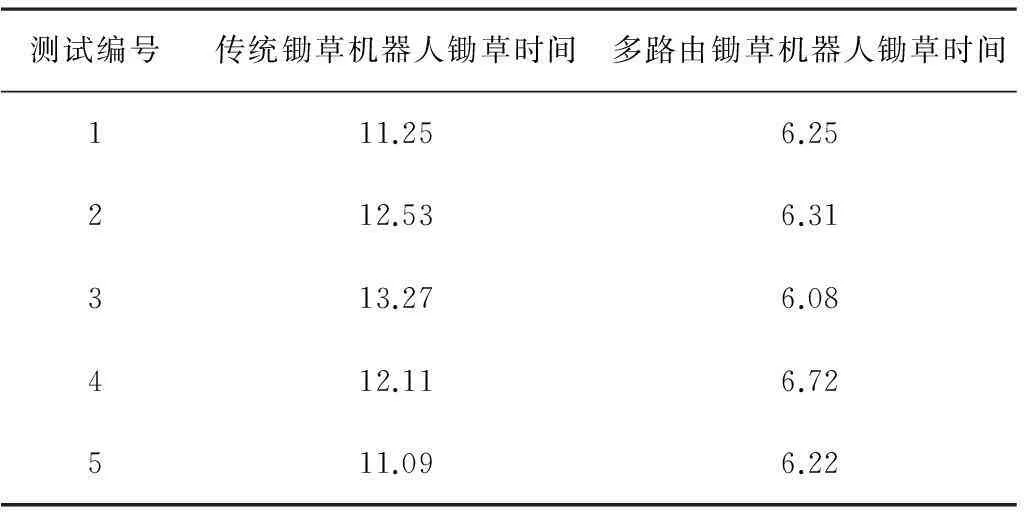
表1 鋤草時間對比表
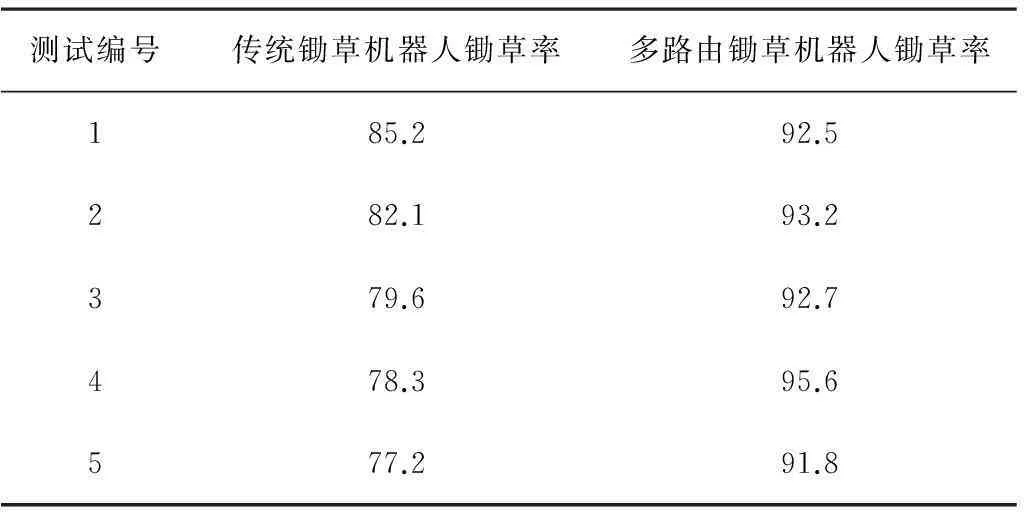
表2 鋤草率對比表
4結論
1)提出了一種新的鋤草機器人刀具多目標優化方法,并對該方法進行了建模和MatLab最優解的計算,提出了一種多路由協議的機器人協同控制方法,并對其工作效果進行了試驗驗證。
2)通過對傳統鋤草機器人和多路由協議多目標算法優化后的機器人的鋤草效率進行對比后發現,選用多目標和多路由協議協同控制不僅可以提高鋤草速度,而且可以提高鋤草率,降低傷苗概率。
3)該裝置可以得到理想的苗間機械鋤草效果,為現代自動化大型中耕除草裝備的設計提供了技術理論依據。但是,也有很多需要改進的地方,如刀具的形式、機器人系統控制的數量等。
參考文獻:
[1]張春龍,黃小龍,耿長興,等.智能鋤草機器人系統設計與仿真[J].農業機械學報,2011,42(7):185.
[2]胡煉,羅錫文,嚴乙桉,等.基于爪齒余擺運動的株間機械除草裝置研制與試驗[J].農業工程學報,2012,28(14):10-16.
[3]李江國,劉占良,張晉國,等.國內外田間機械除草技術研究現狀[J].農機化研究,2006(10):14-16.
[4]韓豹,吳文福,申建英,等.水平圓盤式苗間除草裝置試驗臺優化試驗[J].農業工程學報,2010,26(2):142-146.
[5]龍滿生,何東健.玉米苗期雜草的計算機識別技術研究[J].農業工程學報,2007,23(7):139-144.
[6]侯學貴,陳勇,郭偉斌.除草機器人田間機器視覺導航[J].農業機械學報,2008,39(3):106-108.
[7]毛文華,曹晶晶,姜紅花,等.基于多特征的田間雜草識別方法[J].農業工程學報,2007,23(11):206-209.
[8]李先鋒,朱偉興,紀濱,等.基于圖像處理和蟻群優化的形狀特征選擇與雜草識別[J].農業工程學報,2010,26(10):178-182.
[9]Louis Longchamps,Bernard Panneton,Guy Samson,et al.Discriminationofcorn,grasses and dicot weeds by their UV-inducedfluorescence spectral signature[J].Precision Agriculture,2010,11(2):181-197.
[10]DCSlaughter,DKGiles,DDowney.Autonomousro botic weedcontrol systems:Areview[J].Computers and Electronicsin Agriculture,2008,61(1):63-78.
[11]潘亞清.我國農田化學除草現狀及綜合防治的研究[J].農機化研究,2006(6):42-43.
[12]張澤溥.淺議我國化學除草面臨的挑戰與未來發展[J].農藥科學與管理,2010,31(12):14-18.
[13]宋占華,肖靜,張世福,等. 曲柄連桿式棉稈切割試驗臺設計與試驗[J].農業機械學報,2011,42(11):162-167.
[14]王鋒德,燕曉輝,董世平,等.我國棉花秸稈收獲裝備及收儲運技術路線分析[J].農機化研究,2009,31(12):217-220.
[15]陳樹人,張朋舉,尹東富,等.基于LabVIEW的八爪式機械株間除草裝置控制系統[J].農業工程學報,2010,26(9):234-237.
[16]韓豹,吳文福,申建英,等.水平圓盤式苗間除草裝置試驗臺優化試驗[J].農業工程學報,2010,26(2):142-146.
[17]李耀明, 秦同娣, 陳進,等. 玉米莖稈往復切割力學特性試驗與分析[J].農業工程學報,2011,27(1):160-164.
[18]趙湛,李耀明,徐立章,等.超級稻單莖稈切割力學性能試驗[J].農業機械學報,2010,41(10):72-75.
[19]劉修驥.大幅度減少液壓功率的雙半徑液壓轉向的 研究[J].兵工學報,2012,18(1):24-28.
[20]張道林,刁培松,董鋒,等.撥禾指式不對行玉米收獲裝置的試驗[J].農業工程學報,2010,26(5):103-106.
[21]王岳,曹揚,夏曉東,等.雙季稻區收獲農藝及先進適用聯合收割機型譜[J].農業工程學報,2002,18(2):68-71.
[22]宋春華, 區穎剛, 劉慶庭, 等.兩段式螺旋扶起機構理論的研究[J].農機化研究,2010,32(11): 34-36.
[23]杜現軍,李玉道,顏世濤,等.棉稈力學性能試驗[J]. 農業機械學報,2011,42(4):87-91.
Control Optimization Design and Structure of Plant Weeding Robot Based on Muti-routing Protocols
Li Wei1,Jiang Minxia1,Wang Xiaozhi2,Yu liangjun3
(1.Jiangxi Modern Polytechnic College, Nanchang 330095,China; 2.Department of Process Equipment and Control Engineering,Nanchang University,Nanchang 330031, China;3.Wuhan University of Engineering Science,Wuhan 430200,China)
Abstract:In order to obtain the ideal effect of mechanical weeding between seedlings,it presents a new structural optimization method of weeding robot.It adopts the multi-objective optimization model to design the terminal structure of weeding, the cooperative control of multiple weeding robot with multiple routing protocols,greatly improving the work efficiency of field weeding robot. Based on the established mechanical weeding tooth trajectory mathematical model, it was combined with the requirements of modern agriculture to the limit and mechanical weeding parameters.The multi-objective optimization model is established,and the optimization toolbox of Matlab to obtain the optimal solution and its application in multi robot routing protocol system control framework.In order to verify the validity of the optimization method,experiments are carried out in collaboration of multi field weeding robot, it found through experiments, the multi routing weeding robot after optimization,not only greatly improves the operation speed and the weeding efficiency,but also reduce the crop loss rate, which provides a theoretical basis for the design of rotary tillage weeding machine in large scale.
Key words:weeding robot; multipath routing; cultivating machine; multi objective optimization; weeding rate
文章編號:1003-188X(2016)05-0237-05
中圖分類號:S224.1;TP242.6
文獻標識碼:A
作者簡介:李偉(1981-),男,江西余干人,講師。通訊作者:余良俊(1984-),女,武漢人,講師,博士研究生,(E-mail)yuliangjun1984@126.com。
基金項目:湖北省自然科學基金項目(2014CFC1079);湖北省自然科學基金計劃面上項目(2013CFB418)
收稿日期:2015-04-12
