盾構隧道施工中盾構機姿態控制
2016-03-21 02:58:50王鵬
環球市場 2016年32期
王 鵬
中鐵隧道股份有限公司
盾構隧道施工中盾構機姿態控制
王 鵬
中鐵隧道股份有限公司
我國科學技術的迅猛發展,讓交通地鐵建設也進入了高速發展的過程中,地鐵施工技術的安全性是公眾關注度的重點話題。在近期,因為地鐵施工項目增多,很多大盾構隧道施工中會出現各類施工問題,如果不能及時的處理,就會給施工帶來諸多的問題,增加了施工的復雜性。而這些問題的出現很大部分是由于盾構隧道施工中盾構機姿態的控制問題所造成的,對此,本文筆者將著重分析探討盾構隧道施工中對盾構機姿態的有效控制。
隧道;盾構機;姿態
1 盾構隧道施工中盾構機自動導向
盾構機自動導向系統的姿態定位主要是依據地下控制導線點來精確確定盾構機掘進的方向和位置。首先在控制點上安置好全站儀,輸人測站坐標和后視點坐標,瞄準后視點進行定向,再利用全站儀自動測出ELS棱鏡的坐標(即X,Y,Z)。激光束射向ELS就可以測定激光相對于ELS平面的偏角,在ELS人射點之間測得的折射角及入射角用于測定盾構機相對于隧道設計軸線(DTA)的偏角。坡度和旋轉直接用安裝在ELS內的傾斜儀測量。通過全站儀測出的與ELS之間的距離可以提供沿著DTA掘進的盾構機的里程長度。所有測得的數據由通信電纜傳輸至計算機,通過軟件組合起來用于計算盾構機軸線上前后兩個參考點的精確的空間位置,并與隧道設計軸線(DTA)比較,得出的偏差值顯示在屏幕上,這就是盾構機的姿態。在推進時只要控制好姿態,盾構機就能精確地沿著隧道設計軸線掘進,保證隧道順利準確地貫通。
現在的盾構機都裝備有先進的自動導向系統,本區間盾構機上的自動導向系統為德國VMT公司的SLS-T系統,主要由以下四部分組成:1)具有自動照準目標的全站儀。2)ELS(電子激光系統),亦稱為激光靶板。這是一臺智能型傳感器,接收全站儀發出的激光束,測定水平方向和垂直方向的人射點。3)計算機及隧道掘進軟件。SLS-T軟件是自動導向系統的核心,它從全站儀和ELS等通信設備接收數據,盾構機的位置在該軟件中計算,并以數字和圖形的形式顯示在計算機的屏幕上。4)黃色箱子。它主要給全站儀供電,保證計算機和全站儀之間的通信和數據傳輸。
2 盾構推進中的姿態變化
2.1 盾構姿態參數
盾構姿態參數,是施工中反饋回來的盾構的狀態參數,主要包括刀盤切口的水平、豎向偏差量和中盾尾部的水平、豎向偏差量以及盾構本體前后的偏差比值。盾構狀態參數通過激光導向系統(VMT)實時動態監測,并提供完整的隧道掘進記錄。施工中若發現盾構姿態偏離設計軸線,則需進行盾構姿態調整。
盾構刀盤切口、中盾尾部的水平及豎向偏差量是施工過程中較為重要的參數,直觀地反映了盾構在推進過程中相對軸線的偏差量。現定義豎向、水平向的偏差量方向以坐標正方向為正,如圖1所示。
以某盾構區間施工為背景,整理盾構在該區間掘進過程中切口、中盾尾部的水平及豎向的偏差量,如圖2所示。
通過上述實測水平、豎向偏差量的整理發現,整體上盾構刀盤切口和中盾尾部的豎向偏差量變化趨勢是一致的,即切口或中盾尾部的豎向偏差量可以代表盾構的豎向偏差狀態;而2個位置的水平偏差量差別較大,從切口位置可以看出盾構水平向以設計軸線為中心,處于不斷調整中。(見圖4、圖5)
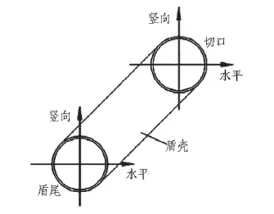
圖1 坐標方向示意圖
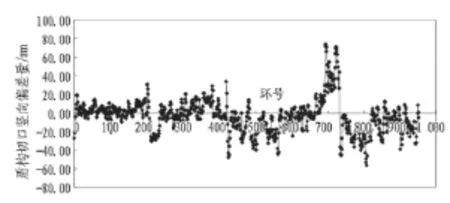
圖2 盾構切口豎向偏差量

圖3 盾構中盾尾部豎向偏差量
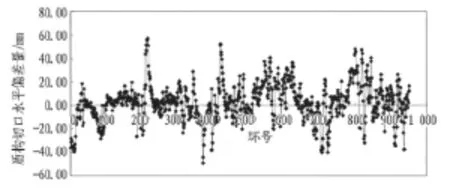
圖4 盾構切口水平偏差量
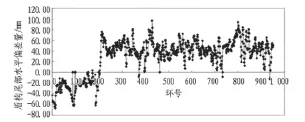
圖5 盾構中盾尾部水平偏差量
在盾構的掘進過程中,姿態調整對于施工來說非常重要,直接影響到盾構施工質量以及后續隧道的運營安全。1.2盾構姿態變化過程盾構的推進是一個動態過程,作用在盾構上的力可分解為前進方向的推力、水平方向的扭矩和豎向的扭矩。推力使得盾構向前推進,水平及豎向的扭矩使盾構姿態發生變化,這種變化包括角度的變化和位置的變化,如圖6和圖7所示。盾構角度的變化是指盾構與設計軸線的夾角變化,位置變化指盾構形心相對于設計軸線的偏移。

圖6 角度變化圖
角度的變化可用如下過程表示:1)盾構與設計軸線之間的初始夾角為θi0(i=y,p),下標y表示水平方向,p表示豎直方向;2)在推進油缸產生的糾偏扭矩作用下,盾構角度變化到θi1(i=y,p);3)以此角度向前推進dz;4)盾構的受力平衡狀態被打破,角度發生變化至θi2(i=y,p)。
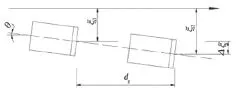
圖7 位置變化圖
盾構的位置偏離變化量為:

由上圖可以看出位置的變化受到角度的控制,只有盾構與設計軸線之間有夾角時,才可能發生位置的變化。
3 不同地質環境中盾構機掘進姿態控制
3.1 泥質土層
盾構機在軟弱土層中掘進時,由于地層自穩定性能極差,為控制盾構機水平和垂直偏差在允許范圍內,避免盾構機蛇形量過大造成地層的過量擾動,宜降盾構機掘進速度控制在30-40mm/mm之間,刀盤轉速控制在1.5r/mm左右。在該段地層中掘進時,四組千斤頂推力應較為均衡,避免掘進過程中千斤頂行程差過大,否則,可能會造成推力軸線與管片中心軸線不在同一直線上在掘進過程中應根據實際情況加注一定量的添加劑,以保持出土順暢,盡量保持盾構機的連續掘進,同時要嚴格控制同步注漿量,以保證管背間隙被有效填充。
3.2 砂層
盾構機在全斷面富水砂層中掘進,由于含水砂層的自穩能力極差,含水量大,極易出現盾構機“磕頭”現象,同時,在含水砂層中盾構機也易出現上浮現象。為避免盾構機在含水砂層中掘進出現“磕頭”現象,在推進過程中盾構機應保持向上抬頭的趨勢,如果發現有“磕頭”趨勢,應立即調節上下部壓力,維持盾構機向上的趨勢。為避免盾構機在含水砂層中掘進出現上浮現象,在盾構機掘進時應減小刀盤轉速,減小對周圍砂層的擾動。
3.3 巖層層面起伏大
巖層層面起伏大會導致隧道開挖面內的巖層出現軟硬不均。盾構機在這種地層中掘進,其盾構機的姿態控制難度大,易產生盾構機垂直方向上的過量蛇行,造成管片錯臺及開裂。以上軟下硬地層為例,在這類地質條件下掘進,盾構機刀盤受力不均,掘進速度不均衡,這就要求在掘進過程中,必須時刻勘察測量系統提供的盾構機姿態數據,結合推進千斤頂和鉸接千斤頂的行程差值,不斷地調整各分區千斤頂的推力及總推力,以保持盾構機姿態的平穩如果不注意調整推進千斤頂的行程差,就會造成管片選型變化大,甚至造成過小的盾尾間隙使管片脫出盾尾。因此,在推進過程中不能單一的只注意測量系統所提供的盾構機姿態來指導掘進,還應記錄各分區千斤頂的行程差。
3.4 全斷面硬巖地層
全斷面硬巖地層屬于均一巖層,盾構機在該類地層中掘進,其軸線姿態能較好地控制,在掘進時保持各分區千斤頂推力均勻,總推力和掘進速度均勻,即可保持盾構機較好的姿態。
總而言之,隨著我國城市現代化程度的不斷提高,越來越多的城市都加快了地鐵的建設步伐,盾構機的正常推進對地鐵的順利建設又起著至關重要的作用。這就要求我們在以后的實際工作中必須對其實現進一步研究探討。
[1]陽東升.盾構隧道施工中盾構機姿態控制[J].科技信息(學術研究),2007,14:242.
[2]談小龍,朱偉,秦建設,杉本光隆.盾構法隧道施工中盾構控制滯后效應的研究[J].地下空間,2004,01:36-40+139.
[3]楊哲峰.蘇州地鐵盾構近接施工力學機理與控制技術研究[D].中國地質大學,2015.
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
北京測繪(2020年12期)2020-12-29 01:37:18
工程與建設(2019年3期)2019-10-10 01:40:18
電測與儀表(2016年9期)2016-04-12 00:29:52
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學學報(自然科學版)(2014年2期)2014-11-12 13:04:54
吉林地質(2014年3期)2014-03-11 16:47:31
