三相PWM整流器控制策略研究及參數整定
2016-03-21 02:02:28張仰飛夏偉棟
浙江電力 2016年8期
關鍵詞:控制策略
徐 巖,張仰飛,夏偉棟,顏 輝
(南京工程學院電力工程學院,南京 211167)
三相PWM整流器控制策略研究及參數整定
徐 巖,張仰飛,夏偉棟,顏 輝
(南京工程學院電力工程學院,南京 211167)
以三相PWM整流器為研究對象,通過對整流器建立數學模型來分析其運行機理和控制策略。采用電壓定向矢量控制方法確定控制策略為電壓外環,電流內環的雙閉環結構。通過研究整流器系統的電感L電容C的參數以及控制策略中PI調節器參數對直流側電壓響應和交流諧波與功率因數的影響,結合Matlab/Simulink仿真給出的波形圖,經過觀察輸出響應的狀態最終確定系統的參數。最后使用Matlab/Simulink軟件來模擬故障并觀察系統的穩定性,通過分析說明系統控制策略以及整定參數的可行性以及正確性。
PWM整流器;電壓定向矢量;PI;Matlab
0 引言
與傳統的整流裝置相比較,PWM整流器因網側電流諧波含量小、功率因數高、電能可雙向傳輸等多方面的優點,被廣泛應用于交流傳動系統中[1-2]。PWM型變換器按電壓源以及電流源將拓撲電路分成2類,控制方法主要有電壓控制、電流控制以及功率控制。
電壓控制策略是根據系統穩態下數學模型反應出的電壓平衡關系,控制輸出的電壓幅值以及相位,再結合電網電壓通過一定的轉換來控制電流和功率[3-4]。經過研究表明,對PWM整流器及其控制技術的研究有助于提高電網質量,還可以補償系統的無功功率、抑制諧波污染以及對電能的合理有效利用。
在本文的整流器控制環節中,采用的是電流內環和電壓外環的雙閉環結構的電壓定向矢量控制方法,有1個電壓外環的PI控制器還有2個電流內環的PI控制器的參數需要確定,只有設置合理的參數才能使系統獲得良好的暫態和穩態響應性能。文獻[5]-[8]介紹了多種參數整定的方式。本文在對PWM整流器建立數學模型的基礎上進行分析研究,在Matlab仿真環境中對雙閉環控制系統進行一定量的參數性能測試和分析工作,整定出一組合適的控制參數,最后通過故障仿真驗證了參數的有效性和可行性。
1 PWM整流器數學模型
在研究中采用的是三相電壓PWM整流器,橋路采用三相橋式全控整流電路,其主電路拓撲結構如圖1所示。
設三相電網電壓平衡,根據等效電路結構圖可以得到電壓電流方程并整理成一階微分方程的矩陣形式為:
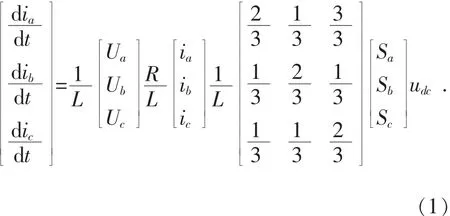
電流之間關系變換為:
式中:Sa,Sb,Sc分別為三相橋臂的開關函數。其中Sk=1;對應橋臂上管導通,下管關斷;Sk=0對應橋臂下管導通,上管關斷;(k=a,b,c)。
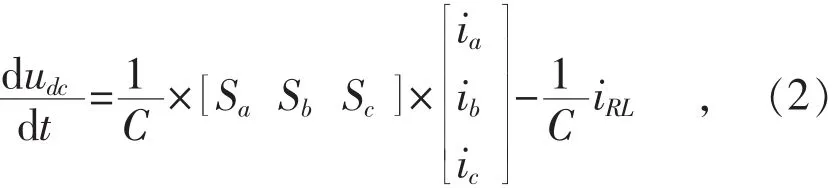
上述方程為PWM整流器在三相靜止坐標系下的方程,由三相靜止坐標系A-B-C變換到兩相靜止坐標系α-β是因為PWM整流器在αβ靜止坐標系下是一個解耦系統。選擇α軸和A軸重合,并且在保持磁勢相同且功率不變的約束條件下,經過變換矩陣Tabc→αβ后,整流器數學模型變為:
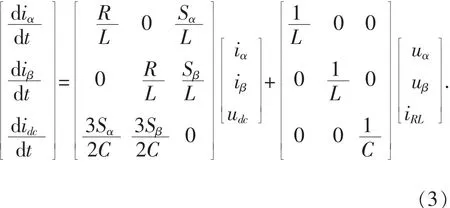
式(3)Sα和Sβ為PWM整流器在αβ靜止坐標系下的開關狀態量。
PWM整流器在兩相同步速旋轉dq坐標系中的數學模型為:

式中:Sd和Sq為PWM整流器在dq旋轉坐標系下的開關狀態量。ω=dθ/dt,角為兩相旋轉坐標系的d軸與三相靜止坐標系的A軸的夾角。
2 PWM整流器控制策略
PWM整流器的控制目標是保持輸出直流電壓恒定且具有良好的動態響應能力。根據式(1)—(4)可知,只需要調節整流器輸出電壓的幅值和相位就能控制整流器交流側輸入電流的大小和與電網電壓的相位角φ,輸入電流的有效控制是整流器控制的關鍵。
在式(1)—(4)的數學模型中,令udr=Sdudc,uqr= Squdc,則電流公式可以寫成:
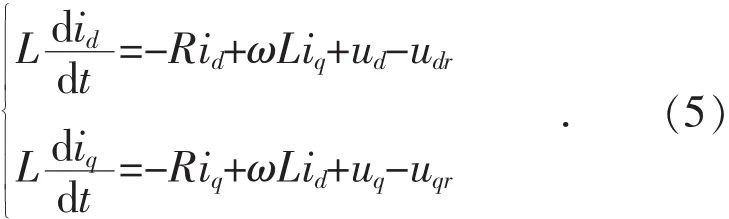
此式表明軸d和q軸電流除受控制量udr和uqr的影響外,還要受到交叉耦合項ωLiq,ωLid和電網電壓ud,uq的影響。這時,分別令:
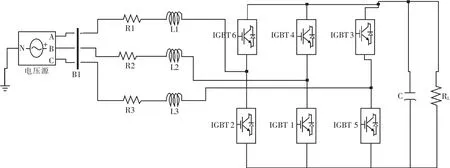
圖1 三相電壓型PWM整流器主電路結構
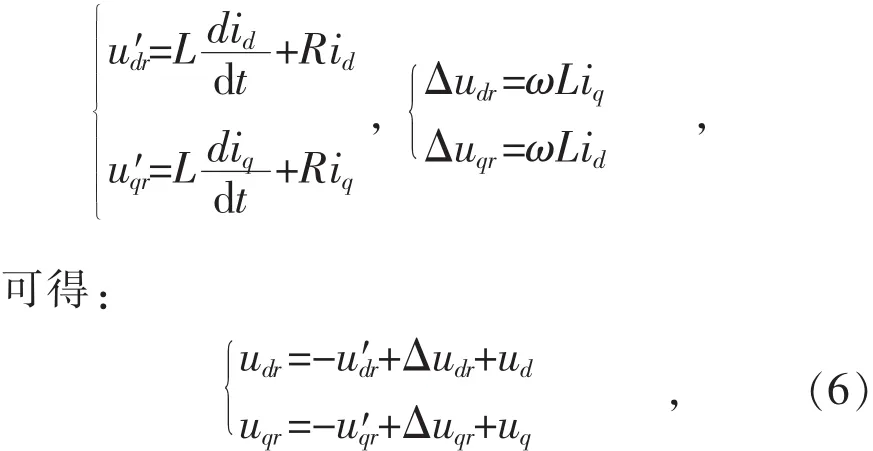
為了簡化控制算法,采用電壓定向矢量控制,將同步速旋轉dq坐標系的d軸定向于電網電壓矢量us方向上,us為相電壓的幅值。設d軸與α軸的夾角為θu,θu=ωt,也就是us的相角,這樣電網電壓的d、q分量為ud=us,uq= 0,可以得到:

根據式(5)—(7)可以確定整流器的控制策略。整個控制系統為雙閉環結構,外環為電壓環,內環為電流環。
3 參數整定
在參數性能的評估中,重點關注的是直流側的電壓波形,同時為了方便調節,網側的電流波形也同樣需要觀察。以圖1的PWM整流器的主電路結構來看,需要確定的有網側的電感L以及直流側的電容C。當輸入電壓U確定時,也就是在整流器功率等級確定的情況下,電感和電容的參數有范圍選擇,通過Matlab仿真軟件找到適合的參數。
在仿真中,取網側相電壓幅值Um=311 V,頻率f=50 Hz,直流側的負載等效電阻RL=30 Ω,網側電阻R=0.1 Ω,開關頻率為fs=10 kHz。分別對電感L取0.5 mH,1 mH,2 mH,3 mH以及4 mH,對電容C取2 000 μF,2 500 μF,3 000 μF以及3 500 μF。
觀察直流側電壓波形,仿真結果表明,電感L和電容C的變化對直流側電壓波形影響比較大。電感L越大過沖越大,響應越慢,而電容C在變化時主要影響的就是過沖,在實際應用中,直流側的電壓過沖不能太大。綜合考慮電壓的過沖以及響應速度,最后確定電感L=2 mH和電容C=3 000 μF。
L和C參數確定后就需要確定控制策略中的PI調節器參數。實際使用中,對直流電壓波形的調整主要是通過調節PI參數來完成的,只有當調整PI參數達不到目標的時候,才來微調L和C的取值。在工程中,d和q軸電流的2個PI調節器的參數往往取為相同,因此最后只需要確定2組PI參數即可,即電壓環的Kup,Kui和電流環的Kip,Kii。
忽略網側電阻R上的電壓降,在考慮到實際工程中電感L上的電壓降不高于網測電壓的30%。根據公式可以推算得到Udc≥560 V,這時設定Udc=600 V。式中Ue和Ie為網側單相中的電壓電流有效值。PI參數的整定在理論上如式(8)所示。

式中:Ti為電流環的時間常數,取值為Ti=L/R; Kpwm為整流器的等效增益,其值大約為和PWM載波峰值的比率;Ts為電流環的采樣周期;Tu為電壓環的采樣周期。
根據式(8)可以算的初始的PI參數為Kip=6.67,Kii=33.3,Kup=0.7,Kui=5.6。先固定3個參數,只調整1個參數,通過觀察波形圖來獲得最佳的參數。對電壓外環參數Kup和Kii,電流內環參數Kip和Kii,在仿真時主要在上述4個參數的計算值附近進行大量取值校驗,觀察直流側電壓波形。
通過比較發現Kup的增大能提高響應速度,減小調整時間,但是會增大超調量,過大的時候直流側電壓波形會發生畸變,選擇Kup=1。隨著Kui增大時,對過沖電壓影響較小,主要影響直流側電壓Udc在第一次達到整定值600 V后下降的幅度,隨著Kui的增大,下降的幅值也越來越大,穩定速度受到了影響。比較電壓的波形以及達到整定值的速度,取Kui=6。
Kip上升到一定的程度后直流側的電壓波形基本不會變化,而減小時,電壓波形波動比較大,超調量增加,電壓波形不穩定,趨于穩定的速度比較慢,所以Kip的值不能太小。經過對比根據實際經驗,電流環的參數一般比電壓環大,最后取電流環Kip的參數為5。
隨著Kii的增加,Udc的過沖相對來說也越來越大,但是對整個系統參數影響不大,主要改變的是系統的穩定速度。在實際中整定Kii參數一般是和Ku一起設定的。結合電壓環以及電流環的參數整定Kii時候的電壓波形,通過對比最后取的值為20。
4 仿真驗證
為了驗證控制策略以及整定的參數的正確性,利用Matlab軟件分別模擬負載的突然切除故障、網側電壓驟降、網側電壓相角突然變化的情況,觀察直流側電壓Udc的穩定性。
4.1 直流側負載變化
為了模擬直流側負載突然切除的狀況,在PWM整流電路的主拓撲結構的負載電阻RL側加上一個開關器件。仿真時常設置為2 s,在到達1 s的時候打開開關,模擬負載切除。經過運行,直流側的電壓波形如圖2所示。
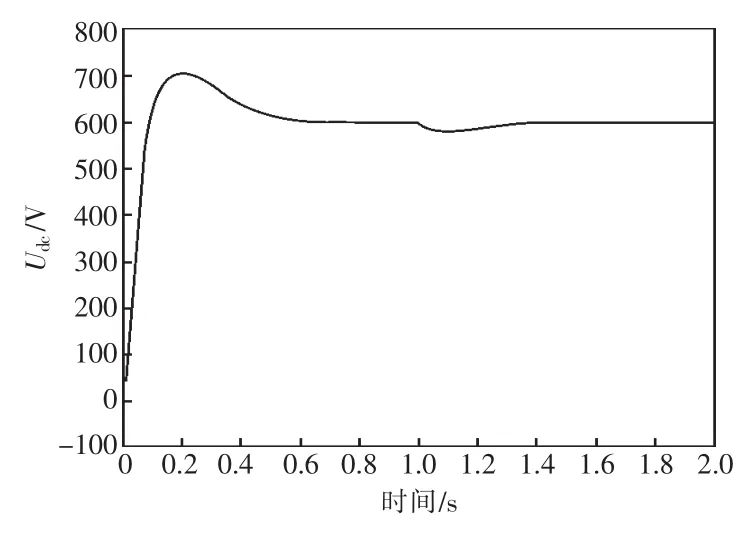
圖2 負載變化時Udc的波形
由圖3可以清楚地看到,當負載在時間1 s的時候變化時,電壓Udc的波形出現明顯跌落,經由控制系統的處理后,直流側的電壓波形又恢復到穩定,電流也進入新的穩定狀態。由此可見控制策略是正確的,整定的參數也比較合理。
4.2 交流側電壓跌落
為了模擬交流側電網電壓的突然跌落,在仿真系統中再加入一個電源,電壓幅值設定為初始電壓的一半,并加上開關器件,在時間t為1 s的時候進行切換。仿真結果如圖3所示。
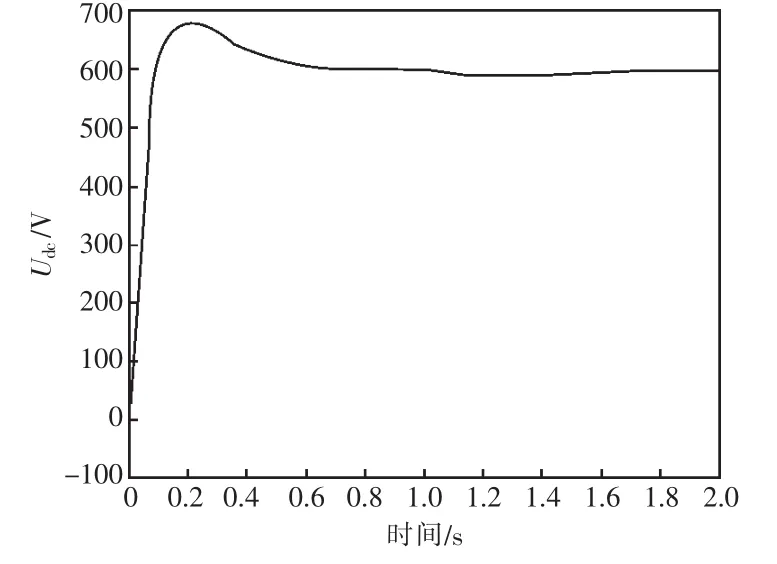
圖3 電壓變化時Udc波形
從圖3可以看到,在時間t為1 s時,電壓的大小下降為原來的一半,這時直流側的Udc大小開始發生變化,在進過短暫的震蕩后很快恢復穩定,這同樣證明了控制策略的正確性以及整定的參數的合理性。
4.3 交流側電壓相角變化
模擬交流側相角變化的主電路和電壓驟降的電路結構一樣,在設定第二個電源時,將相角值設定為60°,同樣設定在時間t為1 s的時候變化。在仿真時發現,當相角變化時,直流側電壓Udc變化不明顯,波形如圖4所示。
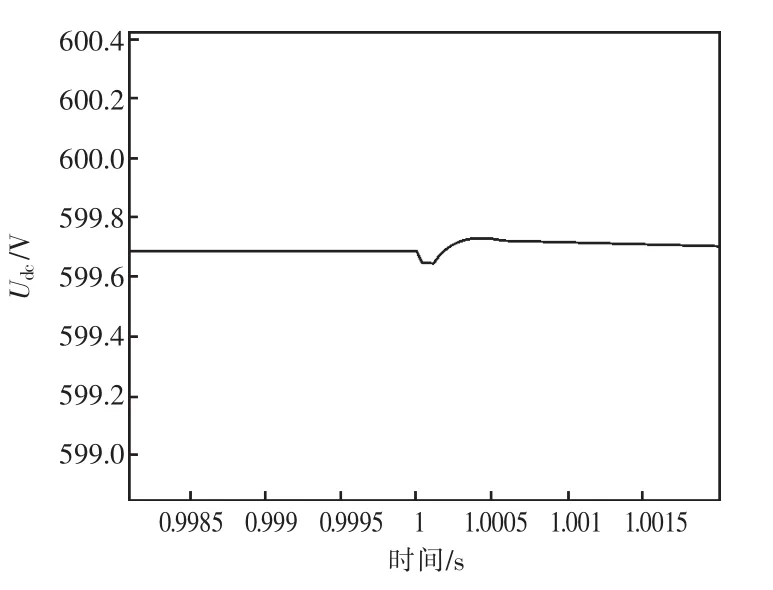
圖4 電壓相角變化時Udc波形
結合圖4可以看到,當電壓相角發生變化時,系統會跟著出現變化,但是變化十分微小,基本可以忽略不計。
通過上面幾組故障仿真,結合直流側電壓Udc的波形,可見本文中的控制策略正確,整定參數合理。
5 結語
通過建立PWM整流器的數學模型,分析整流器的工作原理,在此基礎上利用電壓定向矢量控制方法研究PWM整流器的控制策略,推導出電流內環電壓外環的雙閉環控制策略結構圖,在Matlab中搭建相應的模塊。利用仿真結果來整定控制策略的參數值,最后模擬一些常見的故障,證明控制策略的正確以及整定的參數的合理性。根據仿真結果,能通過觀察的直流側Udc出現的問題來調整相應的參數,并為接下來的PWM整流器參數辨識奠定基礎。
[1]徐金榜.三相電壓源PWM整流器控制技術研究[D].武漢:華中科技大學,2004.
[2]程啟明,程尹曼,薛陽,等.三相電壓源型 PWM整流器控制方法的發展綜述[J].電力系統繼電保護與控制,2012,40(3)∶145-154.
[3]LEE KE YEN,WU YUE LIN,LAI YEN SHIN.Novel bidirectional three-phase rectifier without using DC-link current sensor[C].大功率變流技術,IEEE PESC,Korea,2006,6∶3302-3306.
[4]鐘炎平,沈頌華.PWM整流器的一種快速電流控制方法[J].中國電機工程學報,2005,25(12)∶52-56.
[5]MENDEZ J,GARCIA Y,MATA M T.Three-phase power converter stabilization via total energy-shaping[C].IEEE Conference on Industrial Electronics and Applications,2006,1∶1-6.
[6]趙振波,李和明.PWM整流器 PI參數設計[J].華北電力大學學報,2003,30(4)∶34-37.
[7]張崇巍,張興.PWM整流器及其控制[M].北京:機械工業出版社,2003.
[8]鄭征,張子偉,張朋.三相電壓型PWM整流器不平衡控制策略的研究[J].電氣傳動,2014,44(5)∶26-30.
[9]汪萬偉,尹華杰,管霖.雙閉環矢量控制的電壓型PWM整流器參數整定[J].電工技術學報,2010,25(2)∶67-72.
(本文編輯:楊 勇)
Research on Control Strategies of Three-phase PWM Rectifier and Parameter Setting
XU Yan,ZHANG Yangfei,XIA Weidong,YAN Hui
(School of Electric Power Engineering,Nanjing Institute of Technology,Nanjing 211167,China)
Taking three-phase PWM rectifier as the research object,this paper establishes a mathematical model of PWM rectifier to analyzes operation mechanism and the control strategies.Voltage-oriented vector control method is used to determine a control strategy of double closed-loop structure-outer voltage loop and inner current ring.By studying the parameters of inductance(L)and capacitance(C)of rectifier system and response of PI controller parameter to DC side voltage as well as its impact on AC harmonic and power factor in the control strategy.In combination with waveform from Matlab/Simulink simulation,the system parameter is determined by observing status of the output response.Finally,Matlab/Simulink software is used for fault simulation and stability check of the system to demonstrate the feasibility and correctness of the control strategies and parameter setting.
PWM rectifier;voltage-oriented vector;PI;Matlab
TM461
A
1007-1881(2016)08-0026-05
2016-05-12
徐 巖(1992),男,碩士研究生,研究方向為電力系統運行及控制。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36