海空背景下紅外圖像處理系統設計與實現
2016-03-20 02:45:34唐湘成高志峰
紅外技術 2016年2期
戴 軍,唐湘成,高志峰
?
海空背景下紅外圖像處理系統設計與實現
戴 軍,唐湘成,高志峰
(西南技術物理研究所,四川 成都 610041)
分析了對海紅外成像特征以及圖像處理的技術難點。設計了一種海空背景下對艦船目標進行自動識別和跟蹤的圖像處理系統。首先,介紹了采用目標跟蹤和識別算法并行工作的軟件設計,該設計充分融合跟蹤和識別處理信息。然后介紹了基于雙DSP和FPGA構架的硬件設計,以DSP作為核心處理單元,FPGA作為控制單元。最后給出了外場試驗實驗數據,驗證了該紅外圖像處理系統具有良好的實時性和適應性。
紅外圖像;圖像處理;數字信號處理器
0 引言
反艦導彈從誕生起,由于其強大的作戰能力在海戰中起到了巨大的作用。時至今日,各國愈來愈重視反艦導彈在未來戰場中的作用,已經有超過70個國家部署了各種不同的反艦導彈。為了有效防御反艦導彈,艦載攔截武器迅速發展,以硬殺傷手段來削弱反艦導彈的突防能力,而且各種有源干擾、無源干擾、隱身技術以及電子誘餌的使用進一步削弱了反艦導彈的突防能力。
自海灣戰爭以后,紅外成像制導技術在各種武器中得到了成功運用,它是利用紅外探測器探測目標的紅外輻射,以捕獲目標紅外圖像的制導技術。其特點是制導精度高,不受無線電干擾的影響,可晝夜作戰。紅外成像制導技術作為雷達等常規裝備的有力補充,正在扮演著越來越重要的角色。
隨著技術的快速發展,紅外成像制導工作模式也逐步由人在回路的工作模式向全自主工作模式升級。全自主工作模式要求紅外成像制導系統具有目標自動識別、鎖定和跟蹤的能力,其實現難度較大。紅外圖像處理系統是紅外成像制導系統的重要組成部分,承擔著目標檢測識別、跟蹤等主要作戰任務。
在超低空飛行的反艦制導武器中,海面背景在紅外成像瞬時視場內占據了較大比例,是影響目標識別的主要因素。海面背景的紅外輻射特性與風、太陽、空氣濕度等多種自然條件有關。由于這些條件的無規則變化使得海面背景的紅外成像特性的復雜性遠大于艦船目標自身。艦船目標紅外特性主要受艦船本體輻射、發動機、煙道等內部因素和太陽等外部光源影響,在紅外圖像上呈現為多極性灰度特征。艦船運動時姿態變化以及導彈快速逼近引起的目標圖像幾何變化,加大了目標跟蹤難度。同時圖像處理硬件平臺還需滿足武器裝備對圖像處理系統小型化、低功耗、實時性的要求。
由于目標特性、自然背景、戰場環境等因素的多變,使得紅外成像目標自動識別和跟蹤技術一直是精確制導武器領域的研究熱點和難點。在有關跟蹤和識別的文獻中[1-3],為了使主題清晰,對跟蹤和識別的研究大都是分開進行的。大部分文獻是以算法為中心,針對少量特定數據開展研究,獲得仿真結果,對算法的應用平臺、實時性、適應性等方面關注較少。
本文從工程樣機研制角度出發,將目標識別和跟蹤算法結合起來,以產品為中心開展圖像處理相關技術的研究。本文設計的圖像處理系統以高性能DSP和FPGA芯片為核心構建硬件平臺,采用目標識別和跟蹤并行工作的軟件設計,解決了復雜背景條件下海上艦船目標的自動識別和穩定跟蹤問題。
1 軟件設計
本文提出的圖像處理系統采用目標自動識別和跟蹤并行工作的軟件架構,將識別和跟蹤兩個模塊的處理結果進行充分融合,使兩者信息互補,提高了系統識別可靠性、跟蹤穩定性和抗干擾性能。
圖像處理系統主要由3個獨立的圖像處理功能模塊組成,每個模塊綜合了多種圖像處理算法。3個模塊協同工作,共同完成復合制導系統賦予的任務。這3個功能模塊分別是:自動識別模塊、自動跟蹤模塊和場景感知模塊。3個模塊間的數據流見圖1。其中自動跟蹤模塊在DSPA芯片運行,場景感知模塊和目標自動識別模塊在DSPB芯片運行。采集到的數字圖像一分為二,分別送給DSPA和DSPB,兩片DSP同時對同一幅紅外圖像進行處理。
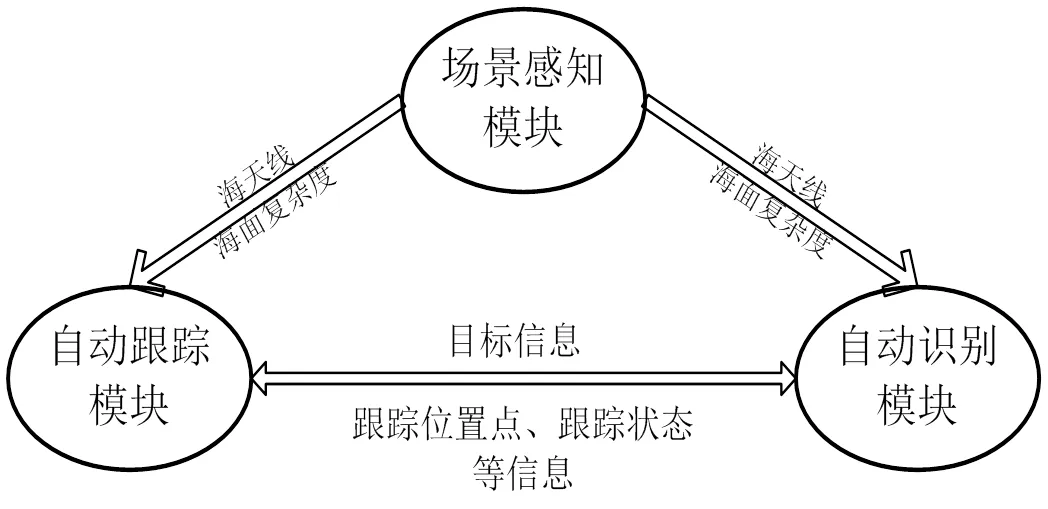
圖1 三個功能模塊的數據流
1)場景感知
超低空飛行反艦導彈紅外成像特點是:①圖像背景包括海天交界線、天空和海面背景;②海面背景的紅外輻射特性與風、太陽等多種自然條件有關,成像特性復雜;③被攻擊艦船目標位于海天交界區域。根據紅外成像特點,海天線和海面復雜度等場景信息對目標識別跟蹤有重要的參考價值。
場景感知模塊通過分析海面背景紋理特征,對海面復雜度進行評價[4];采用圖像高頻檢測與邊緣檢測相結合的方法,提取海天線特征。這些信息檢測提高了紅外成像制導系統的場景感知能力。所提取出的信息一方面傳遞給自動識別和跟蹤模塊,用于算法參數調整和目標選擇;另一方面傳遞給復合制導信息融合系統,為制導系統綜合決策提供數據支持。
2)自動跟蹤
自動跟蹤模塊是實現對海面艦船目標穩定跟蹤的功能。在超低空飛行的反艦導彈應用中,應滿足以下需求:①適應不同距離的目標跟蹤;②適應目標灰度極性的變化;③適應目標姿態的變化;④適應末段場景快速膨脹的變化;⑤適應多種干擾背景。
為滿足以上要求,采用多級、多區域自適應跟蹤算法,融合場景信息和目標信息,結合匹配率、目標變化率等數據,刷新跟蹤區域模板,修正跟蹤點。通過多種信息的融合處理,抑制了跟蹤點漂移,提高跟蹤階段的抗干擾能力。工作流程圖見圖2所示。
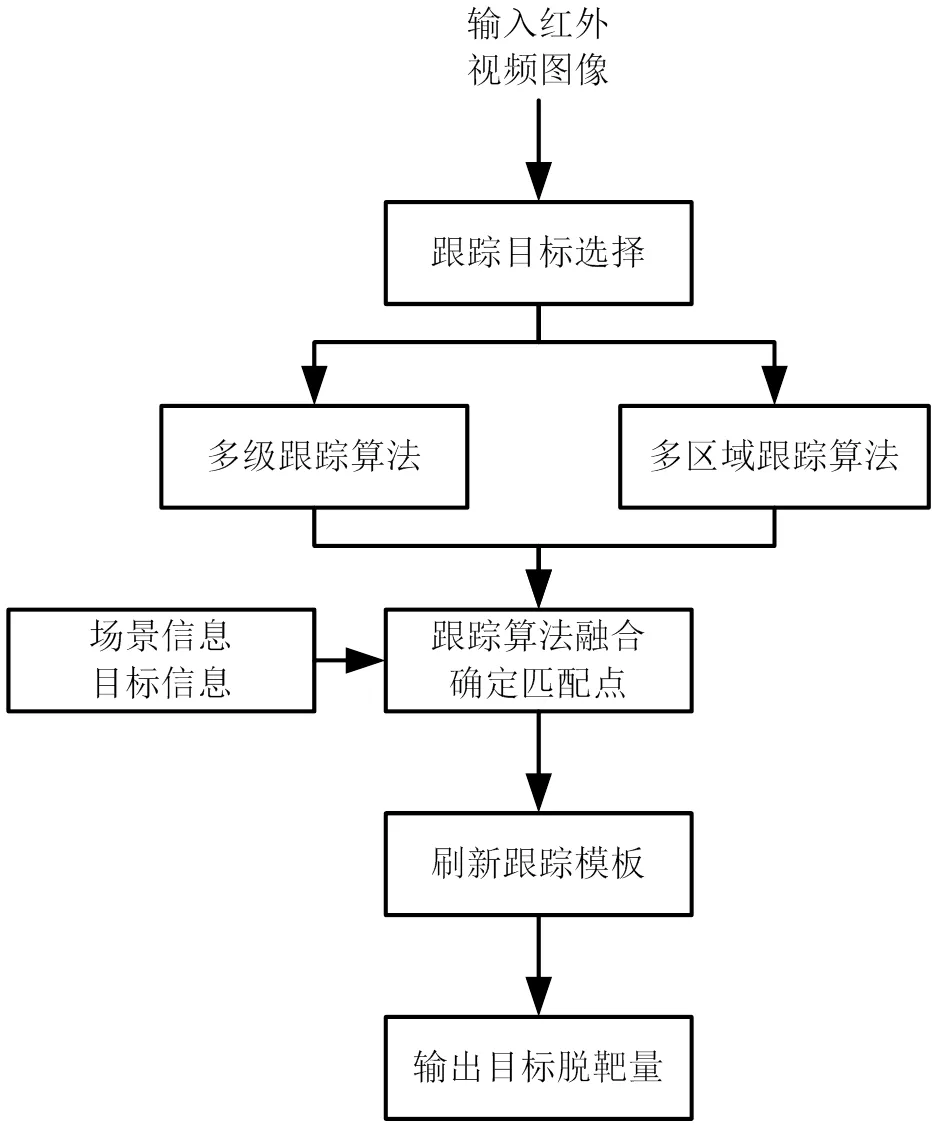
圖2 目標跟蹤的流程簡圖
自動跟蹤模塊還將解算出的跟蹤點位置、跟蹤狀態等信息傳給自動識別模塊,為跟蹤目標的信息提取提供數據支持。
3)自動識別
自動識別模塊是實現檢測識別不同距離、不同大小的艦船目標的功能。為滿足系統對目標自動識別的要求,采用基于特征空間變換的目標識別技術,融合單幀檢測和多幀檢測完成對海上艦船目標的識別,解決了在復雜背景干擾下目標檢測識別的問題。自動識別模塊主要由3部分組成:單幀目標檢測、多幀目標檢測、綜合決策。工作流程見圖3所示。
單幀目標檢測是對單幀圖像進行多級特征空間變換,充分利用場景信息提取潛在目標區域,根據艦船和系統應用環境的先驗知識,篩選出候選目標;多幀目標識別是在單幀目標提取的基礎上,利用目標的幀間相關性,濾除起伏不定的干擾,降低虛警,檢測出候選的艦船目標;綜合決策是結合系統信息,依據綜合決策函數,對多幀目標檢測結果進行擇優選取,提取目標信息,最終完成目標自動識別。
自動識別模塊將識別出的目標信息一方面傳遞給自動跟蹤模塊,協助跟蹤算法調整參數;另一方面,傳遞給復合制導信息融合系統,為目標選擇提供數據支持。
2 硬件設計與實現
圖像處理算法運算量較大,國內一些同行在實時圖像處理系統設計中采用了DSP陣列結構[5-7]。為實現跟蹤和識別算法并行處理的要求,硬件平臺采用雙DSP+FPGA架構,構成兩個相對獨立的圖像處理子系統。其中一片DSP主要負責與外部設備的通訊,實現目標跟蹤功能;另一片DSP主要實現目標識別的相關功能。
本系統硬件平臺的結構框圖如圖4所示。DSP采用TI公司TMS320C6416芯片,FPGA采用Altera公司的EP3C120芯片。
TMS320C6416芯片是TI公司推出的高性能定點DSP,工作主頻600MHz~1GHz,1MByte的片內RAM。該DSP采用先進的超長指令結構,每個時鐘周期可以執行8條指令;有2個擴展存儲器接口(EMIF),總線寬度分別為64bit(EMIFA)和16bit(EMIFB),可以與異步/同步存儲器無縫連接,最大可尋址范圍為1.2GB;具有擴展的直接存儲器訪問控制器(EDMA),可以提供64條獨立的DMA通道。
每片DSP連接大容量SDRAM和FLASH存儲芯片。SDRAM存儲器用于存儲圖像和算法數據,為DSP運行復雜圖像處理算法提供保證。FLASH存儲器用于存儲程序數據和配置參數。由FPGA構建雙口RAM進行雙DSP之間通訊。
FPGA主要完成構建多種接口,包括雙口RAM和RS422接口,實現圖像處理系統與上位機和測試設備之間的通訊。同時FPGA實現功能還包括:圖像采集,字符疊加,視頻顯示等。
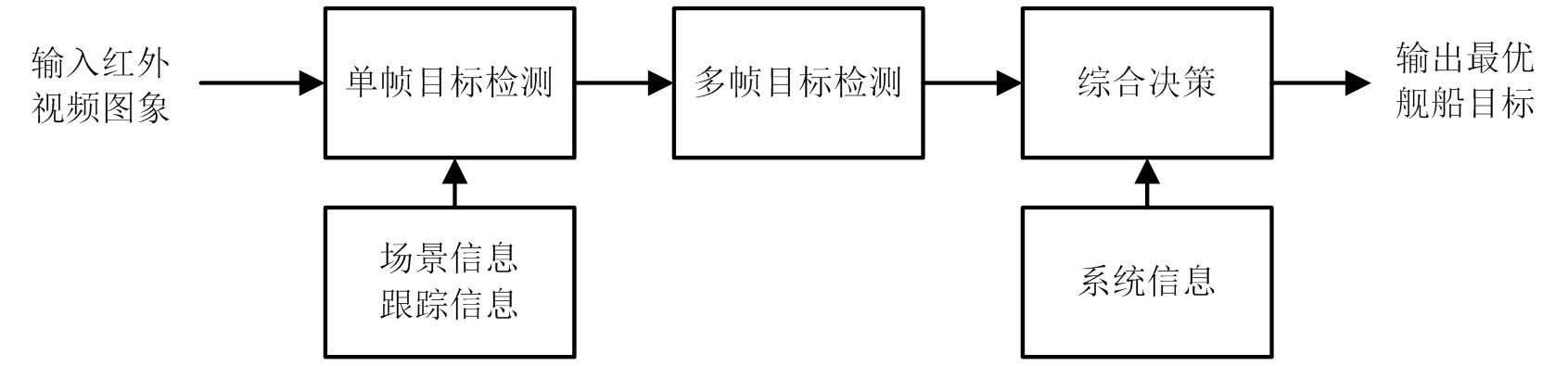
圖3 自動目標識別的流程簡圖
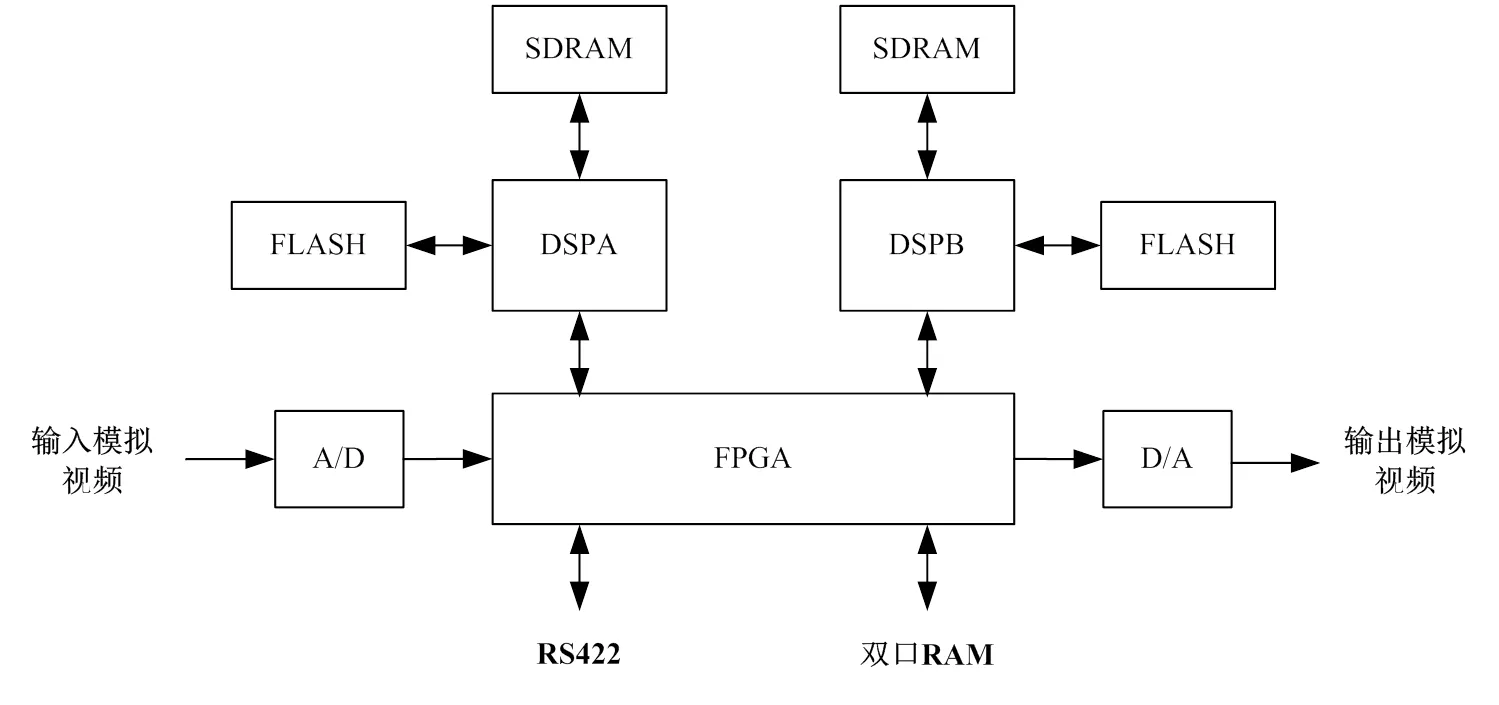
圖4 硬件結構簡圖
兩片DSP均通過行場同步觸發EDMA通道,接收FPGA采集的數字圖像,并以乒乓方式存儲在外部SDRAM存儲器內。EDMA通道完成一場圖像采集后,產生軟中斷通知DSP可對已存儲圖像進行處理。通過這種硬件和數據流構架,雙DSP可并行對同一幅圖像進行處理,滿足了跟蹤和識別模塊并行工作的需求。
通過對圖像處理系統處理性能測試,圖像處理場頻達到了50場/s。
3 實驗結果
文中研制的圖像處理系統經過了多次外場試驗。圖5是實際外場試驗的圖像數據,產品架設高度約為30m,紅外探測器為中波紅外探測器。圖5(a)~圖5(c)是多種場景下系統自動識別捕獲目標的圖像數據。從圖5中可以看出,圖像處理系統能適應多種海面背景,能適應黑白不同極性的目標特性。
圖6是動態快速逼近仿真試驗的截圖。視頻數據采集時:產品架設高度為5~6m,目標艦船由遠及近逐漸逼近。對采集到的視頻進行抽幀處理,模擬導彈快速逼近,驗證圖像處理系統跟蹤性能。圖6(a)~圖6(d)分別是目標艦從遠及近的跟蹤圖像數據截圖。通過仿真試驗驗證了在目標快速逼近過程中,圖像處理系統能連續穩定跟蹤目標。
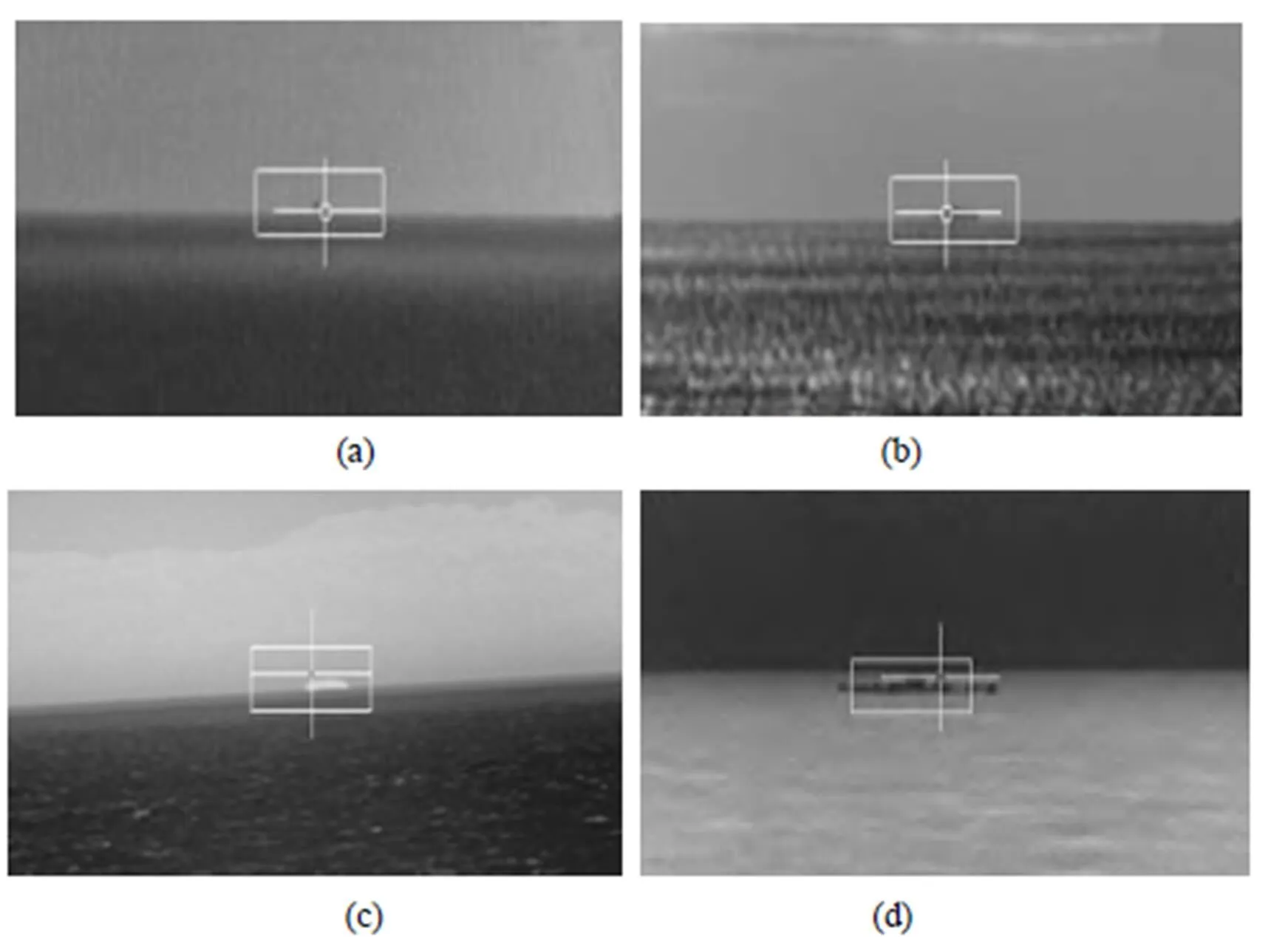
圖5 外場試驗圖像數據
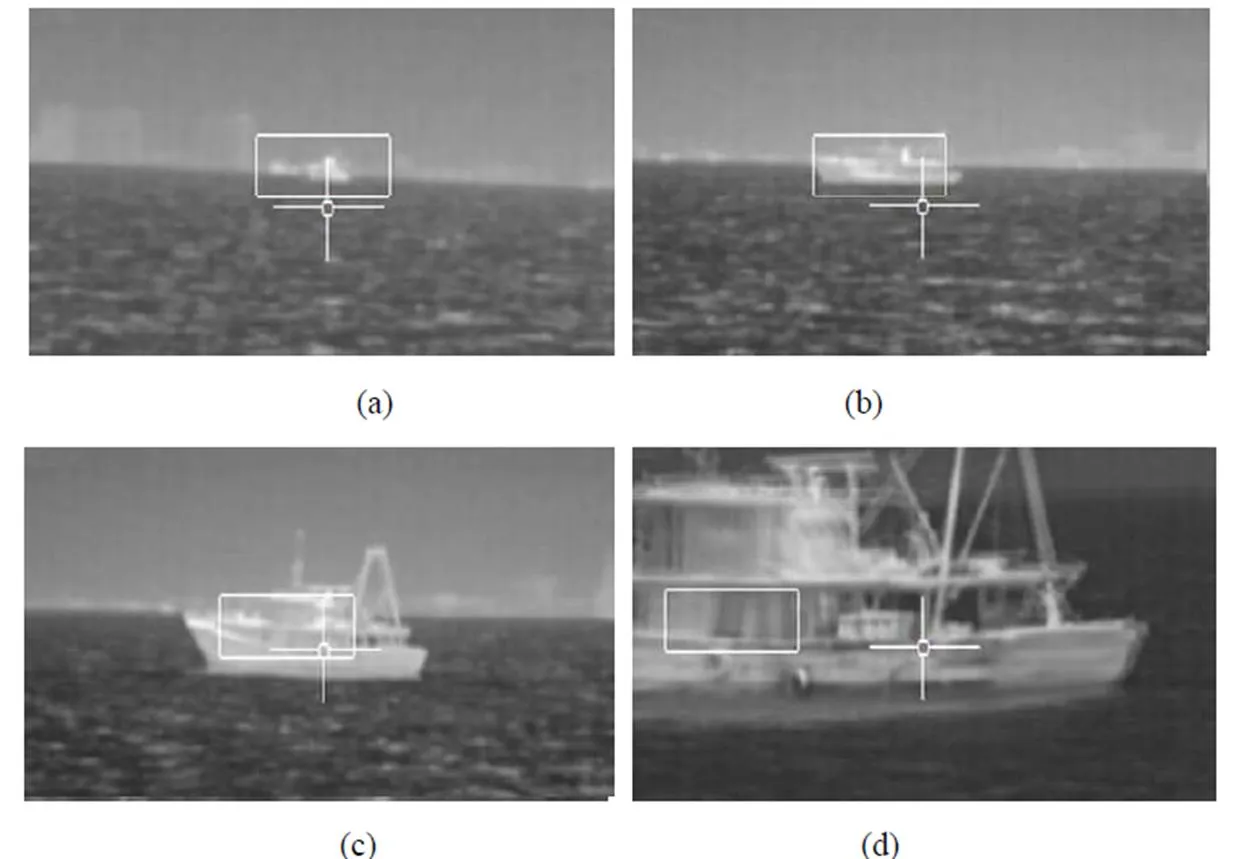
圖6 動態逼近試驗截圖
4 結束語
本文討論了一種對海紅外圖像處理系統的軟硬件設計以及實現。該圖像處理系統采用了雙DSP+FPGA的硬件構架,目標識別和跟蹤并行處理的軟件構架,充分融合了跟蹤和識別的信息。經過了多次外場試驗,驗證了系統能可靠檢測識別艦船目標,可連續穩定跟蹤不同距離的艦船目標,適應多種復雜外場環境。
[1] 張天序, 趙廣州, 王飛, 等. 一種快速遞歸紅外艦船圖像分割新算法[J]. 紅外與毫米波學報, 2006, 25(4): 295-300.
ZHANG Tian-xu, ZHAO Guang-zhou, WANG Fei, et al. Fast recursive algorithm for infrared ship image segmentation[J]., 2006, 25(4): 295-300.
[2] 婁越, 相里斌, 劉波. 基于背景粗糙度估計的紅外目標檢測算法[J]. 光子學報, 2007, 36(9): 1759-1763
LOU Yue, XIANG Li-bin, LIU Bo. A fast background roughness-based infrared naval vessel target detection algorithm[J]., 2007, 36(9): 1759-1763.
[3] 閆曉珂, 鄭均杰. 反艦長波紅外成像導引頭誘餌識別算法[J]. 紅外與激光工程, 2012, 41(10): 2583-2587
YAN Xiao-ke, ZHENG Jun-jie. Surface-type decoy recognition for long wave infrared imaging seeker based on anti-ship missile[J]., 2012, 41(10): 2583-2587.
[4] 戴軍, 金代中, 高志峰. 基于紋理特征驅動AdaBoost算法的海面場景分類[J]. 激光與紅外, 2015, 45(4): 462-466.
DAI Jun, JING Dai-zhong, GAO Zhi-feng. Sea scene classification based on AdaBoost algorithm with texture characteristics[J]., 2015, 45(4): 462-466.
[5] 黃宗福, 王衛華, 熊運生, 等.天文光電觀測系統實時信息處理機的設計與實現[J]. 紅外與激光工程, 2012, 41(3): 671-676.
HUANG Zong-fu, WANG Wei-hua, XIONG Yun-sheng, et al. Design and implementation of a real-time signal processor for astronomical opto-electronic observation system[J]., 2012, 41(3): 671-676.
[6] 王厚,顧國華, 錢惟賢, 等.高速紅外視頻處理系統的設計研究[J]. 紅外技術, 2014, 35(7): 404-408.
WANG Hou, GU Guo-hua, QIAN Wei-xian, et al. Design research of high-speed infrared video processing system[J]., 2014, 35(7): 404-408.
[7] 李一芒, 何昕, 魏仲慧. 多級式紅外預警圖像處理系統設計與實現[J]. 紅外技術, 2014, 36(2): 131-135.
LI Yi-mang, HE Xin, WEI Zhong-hui. Design of implementation of multistage infrared early warning system[J]., 2014, 36(2): 131-135.
Design and Implementation of an Infrared ImageProcessing System under Sea and Sky Background
DAI Jun,TANG Xiangcheng,GAO Zhifeng
(,610041,)
The characters of IR image under sea and the technical difficulties of image processing of which are analyzed. An infrared image processing system, which could automatically detect and track ship targets under sea and sky background, is introduced. First, the design of system software based on parallel processing of target tracking and detecting algorithms is introduced. The design fully fuses the processing information of tracking and detection model. Then, the system is implemented on the framework of double DSPs and FPGA. In the system, DSPs are used as core processing units, and FPGA is used as control unit. Finally, the practical experiments demonstrate the infrared image processing system has good real-time performance and adaptability.
infrared image,image process,DSP
TN216
A
1001-8891(2016)02-0121-05
2015-10-16;
2016-01-05.
戴軍(1972-),女,浙江杭州人,高級工程師,主要從事圖像處理領域的研究工作,E-mail:hyxdaijun@163.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
特別健康(2018年3期)2018-07-04 00:40:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年26期)2016-08-22 03:23:28
海峽科技與產業(2016年3期)2016-05-17 04:32:12