MEMS加速度計組合在分度頭上的標定方法
2016-03-16 05:37:25陳希軍任順清
導航定位與授時 2016年3期
關(guān)鍵詞:方法
高 亢,陳希軍,任順清
(哈爾濱工業(yè)大學 空間控制與慣性技術(shù)研究中心,哈爾濱 150080)
MEMS加速度計組合在分度頭上的標定方法
高 亢,陳希軍,任順清
(哈爾濱工業(yè)大學 空間控制與慣性技術(shù)研究中心,哈爾濱 150080)
提出了一種在分度頭上標定MEMS加速度計組合的測試方法,該方法可以標定出加速度計組合的刻度系數(shù)誤差、加速度計零偏、三軸不正交度誤差、安裝誤差角,同時可以分離出分度頭轉(zhuǎn)位機構(gòu)角位置誤差。首先通過建立一系列坐標系,推導了重力加速度在加速度計敏感軸的分量表達式。然后采用諧波分析法給出了誤差標定方程,利用最小二乘法和Kalman濾波器進行誤差參數(shù)的估計,并對估計結(jié)果進行了對比分析。最后通過三次獨立實驗標定結(jié)果的重復性和殘差驗證了該方法的正確性。
MIMU組合標定;MEMS加速度計;光柵分度頭;諧波分析法; Kalman濾波
0 引言
加速度誤差系數(shù)的辨識多采用多位置法,根據(jù)不同的加速度計采用不同的位置取向,例如繞性加速度計采用的12點翻滾測試法,MEMS加速度計測試常采用六位置測試法。文獻[1]中介紹了利用高精度三軸轉(zhuǎn)臺標定MEMS加速度計組合的六位置測試法,標定出了加速度計的零偏、刻度因子和安裝誤差。文獻[2]提出利用普通氣泡水平儀和六面體盒狀物實現(xiàn)加速度計組合的六位置現(xiàn)場簡易標定方法,但是該方法只能標定低精度的加速度計,文中標定的加速度計分辨率只有3.9mg。
在現(xiàn)有的文獻中,有利用光柵分度頭完成加速度計單表在重力場中標定的研究。文獻[3]提出了一種在分度頭上標定加速度計單表的全組合測試方法,該方法能夠在標定加速度計誤差模型的同時,處理分度頭的角位置誤差,從而提高了標定精度。文獻[4]則是通過正交雙表兩種安裝位置的測試方式,從加速度計的輸出中分離出分度頭的角位置誤差。
本文提出了一種在光柵分度頭上標定MEMS加速度計組合的方法,該方法可以標定出誤差模型中的加速度計組合的刻度系數(shù)誤差、零偏、三軸不正交度誤差、安裝誤差角以及分度頭轉(zhuǎn)位機構(gòu)的角位置誤差。在沒有精密轉(zhuǎn)臺的情況下,利用光柵分度頭就可以得到高精度的標定結(jié)果。
1 測試系統(tǒng)
如圖1所示,整個測試系統(tǒng)由光柵分度頭、MEMS慣組、夾具等組成。光柵分度頭相當于一個單軸轉(zhuǎn)臺,繞旋轉(zhuǎn)軸轉(zhuǎn)動的角位置分辨率為0.1″,其精度遠高于MEMS加速度計的測試精度,因此其角位置誤差可以忽略不計。此外,分度頭還有一個俯仰軸,使分度頭可以繞圖1中的Y軸方向在0°~90°范圍內(nèi)轉(zhuǎn)動。但是俯仰軸的角位置是由機械游標直接讀出,角位置精度只有3′左右,因此角位置誤差是不能忽略的,本文標定加速度計時需要將其考慮在內(nèi)。
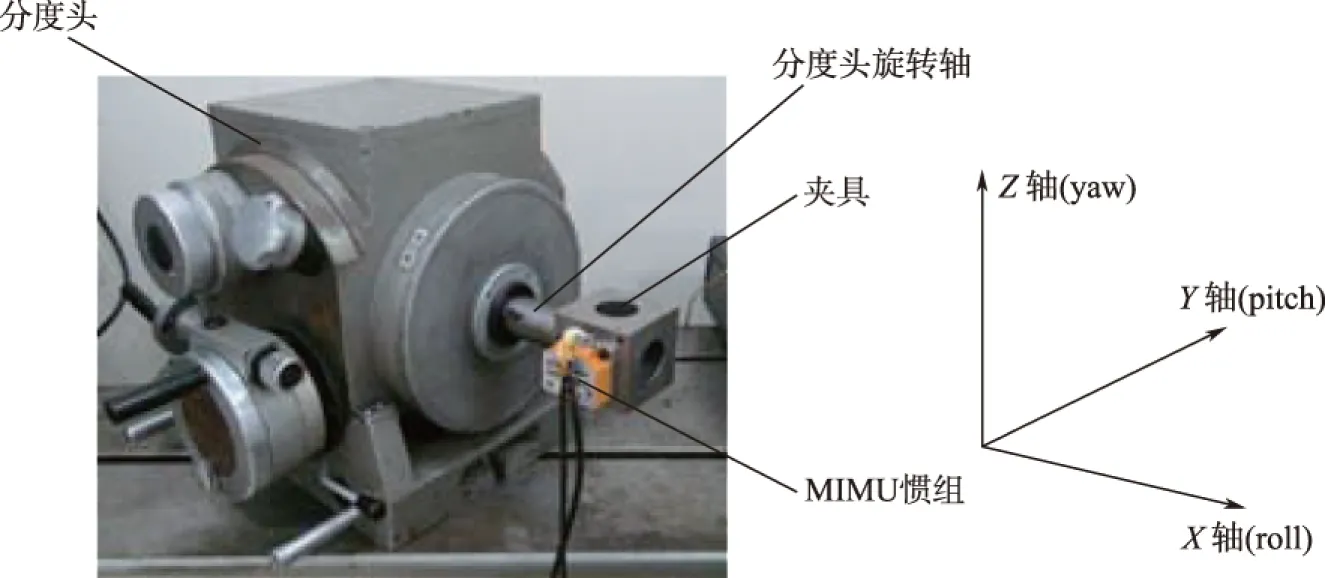
圖1 測試裝置Fig.1 Testing equipment
將旋轉(zhuǎn)軸的角位置記為α,轉(zhuǎn)位機構(gòu)的角位置記為β。利用水平儀調(diào)整加速度計敏感軸方向與分度頭坐標系方向一致,記α=0°、β=0°。實驗的測試步驟如下:
1)分度頭轉(zhuǎn)位機構(gòu)處于零位β=0°,依次轉(zhuǎn)動分度頭角位置為α=0°、45°、90°、135°、180°、225°、270°、315°,記錄三個加速度計的輸出Ax0、Ay0、Az0。
2)調(diào)整分度頭轉(zhuǎn)位機構(gòu)使β=45°,依次轉(zhuǎn)動分度頭角位置為α=0°、45°、90°、135°、180°、225°、270°、315°,記錄三個加速度計的輸出Ax1、Ay1、Az1。
3)調(diào)整分度頭轉(zhuǎn)位機構(gòu)使β=90°,依次轉(zhuǎn)動分度頭角位置為α=0°、45°、90°、135°、180°、225°、270°、315°,記錄三個加速度計的輸出Ax2、Ay2、Az2。
下文中將說明如何從這三組測試數(shù)據(jù)中辨識出所有的誤差參數(shù)。
2 誤差參數(shù)標定模型
2.1 坐標系的建立
要想得到重力加速度在三個加速度計上的分量,必須要知道從地理坐標系到加速度計敏感軸坐標系的轉(zhuǎn)換關(guān)系,因此首先定義坐標系如下:
1)地理坐標系OX1Y1Z1:即為當?shù)氐乩碜鴺讼担@里定義為東北天坐標系。OX1Y1在水平面內(nèi),OX1軸指向東向,OY1軸指向北向 ,OZ1由右手定則確定。
2)分度頭基準坐標系OX2Y2Z2:如圖1所示,此時分度頭的旋轉(zhuǎn)軸處于水平位置,分度頭基準坐標系的OX2軸與旋轉(zhuǎn)軸軸線方向一致;OZ2軸鉛垂向上;OY2軸在水平面內(nèi),方向由右手定則確定。分度頭基準坐標系不會隨著分度頭的旋轉(zhuǎn)軸和轉(zhuǎn)位機構(gòu)轉(zhuǎn)動。定義分度頭基準坐標系OX2軸與地理坐標系OX1軸的夾角為θ,即地理坐標系撓OZ1軸旋轉(zhuǎn)θ角得到分度頭坐標系OX2Y2Z2。
3)安裝坐標系OX3Y3Z3:該坐標系與分度頭固連,隨著分度頭的旋轉(zhuǎn)軸以及轉(zhuǎn)位機構(gòu)一起旋轉(zhuǎn),初始位置與分度頭基準坐標系重合。
4)加速度計正交坐標系OX4Y4Z4:該坐標系定義為理想的加速度計敏感軸坐標系。加速度計在夾具上的安裝以及夾具在分度頭上的安裝都會產(chǎn)生安裝誤差角,定義加速度計正交坐標系OX4Y4Z4和安裝坐標系標系OX3Y3Z3之間的誤差角為[δθxδθyδθz]T,其中δθx、δθy、δθz都是小角度。
5)加速度計敏感軸坐標系OX5Y5Z5:該坐標系的三個坐標軸的方向與加速度計敏感軸方向一致。由于加速度計的敏感軸存在不正交度誤差,因此該坐標系為非正交坐標系。
加速度計敏感軸坐標系OX5Y5Z5與加速度計正交坐標系OX4Y4Z4的位置關(guān)系如圖2所示。定義軸OX5與OX4重合,OX5Y5與OX4Y4在一個平面內(nèi),OY5軸和OX5正交,OZ5軸由右手定則確定。定義OY5與OX5的不正交度為γ21,OZ5與OX4、OY4的不正交度分別為γ31和γ32。
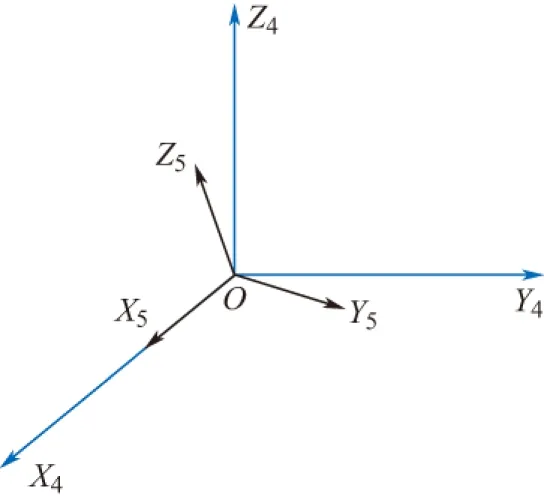
圖2 加速度計正交坐標系OX4Y4Z4Fig.2 Accelerometers Orthogonal coordinate system OX4Y4Z4
從地理坐標系到加速度計敏感軸坐標系的轉(zhuǎn)換關(guān)系如圖3所示。
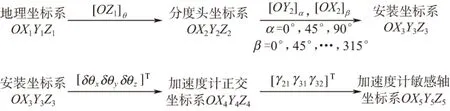
圖3 地理坐標系到加速度計敏感軸坐標系的轉(zhuǎn)換Fig.3 Transformation from geographic coordinate system to coordinate system of the accelerometers’ sensitive axs
2.2 加速度計輸出表達式
根據(jù)圖3所示的坐標變換關(guān)系可以得到加速度計敏感到的比力的表達式為
(1)
只考慮加速度計的標度因子誤差和零偏時,加速度計的輸出為:
Axi= (1+ΔKx)[-(sinβi+cosβiΔβi)+
δθz(cosβi-sinβiΔβi)sinα-
δθy(cosβi-sinβiΔβi)cosα]+x
(cosβδθz)sinα+(-cosβiδθy)cosα
(2)
Ayi= (1+ΔKy)[(δθz-γ21)(sinβi+cosβiΔβi)+
(cosβi-sinβiΔβi)sinα+
δθx(cosβi-sinβiΔβi)cosα+y
≈(sinβiδθz-sinβiγ21+y)+
(cosβi+cosβiΔKy-sinβiΔβi)sinα+
(cosβiδθx)cosα
(3)
Azi= (1+ΔKz)[-(δθy+γ31)(sinβi+cosβiΔβi)+
(-δθx+γ32)(cosβi-sinβiΔβi)sinα+
(cosβi-sinβiΔβi)cosα]+z
(-cosβiδθx+cosβiγ32)sinα+
(cosβi+cosβiΔKz-sinβiΔβi)cosα
(4)
2.3 誤差參數(shù)辨識方案
令β=0°、45°、90°,對應的角位置誤差分別為Δβ0、Δβ1、Δβ2,有:
Ax0=-Δβ0+δθzsinα-δθycosα+x
Ay0=(1+ΔKy)sinα+δθxcosα+y
Az0=(-δθx+γ32)sinα+(1+ΔKz)cosα+z
(5)

(6)
Ax2=1+ΔKx+x
Ay2=-(δθz-γ21)+Δβ2sinα+y
Az2=(δθy+γ31)+Δβ2cosα+z
(7)
為了進行誤差參數(shù)的辨識,需要將式(5)、式(6)、式(7)寫成如下的矩陣形式
Z=HX+V
(8)
其中,Z為觀測量,X為需要辨識的誤差項,H為系數(shù)矩陣,V為量測噪聲。
如果直接將加速度計的輸出值作為觀測量,則Z為72×1矩陣,H為72×15矩陣,將使得計算量大大增加。注意到角度α是在一個周期內(nèi)均勻分布的,可以將式(5)、式(6)、式(7)看成加速度計輸出值的Fourier一級展開式,只要從采集的數(shù)據(jù)中分離出均值項和一次諧波系數(shù),與表達式對應就能辨識出誤差項,該方法又稱為諧波分析法。
采用諧波分析法,將對應的諧波系數(shù)作為觀測量,得到系統(tǒng)的方程為式(10)。

(9)
本文將采用最小二乘法和Kalman濾波兩種方法來進行誤差辨識,并對兩種估計結(jié)果進行對比分析。最小二乘法的估計方程為
X=(HTH)-1HZ
(10)
需要辨識的誤差狀態(tài)量是不隨時間變化的靜態(tài)變量,因此將通用的Kalman濾波方程簡化為:
(11)
其中,K為增益矩陣,P為協(xié)方差矩陣,R為量測噪聲。
3 仿真分析
首先,通過Matlab仿真來驗證該方案的正確性與可行性。仿真設(shè)置的誤差參數(shù)為刻度系數(shù)誤差ΔK=[0.0002 -0.00012 0.0003],零偏安裝誤差角不正交度轉(zhuǎn)位機構(gòu)角位置誤差為了模擬MEMS加速度計的輸出,加入均值為0、標準差為0.15mg的高斯噪聲作為量測噪聲。
采用最小二乘法和Kalman濾波對誤差參數(shù)進行估計,估計結(jié)果如圖4~圖8所示。可見,最小二乘估計結(jié)果中含有較大噪聲,Kalman濾波可以很好地將噪聲去除,誤差參數(shù)的估計值大約在300組數(shù)據(jù)后收斂。
最小二乘法的估計結(jié)果中噪聲太大,嚴重影響估計精度,因此采用濾波的方法對估計結(jié)果進行再處理,將前N次估計結(jié)果的均值作為第N次的估計值,處理結(jié)果如圖9所示。
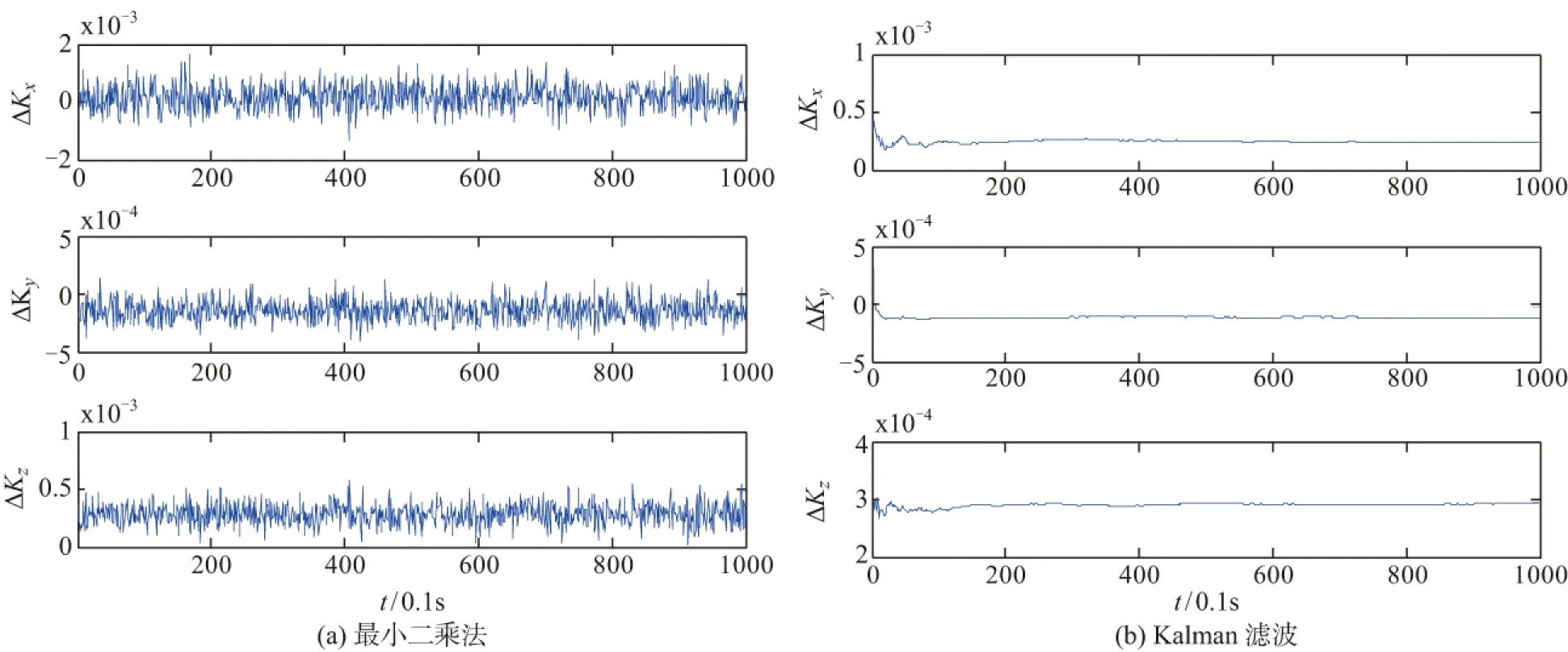
圖4 標度因數(shù)估計過程Fig.4 Scale factor estimation process
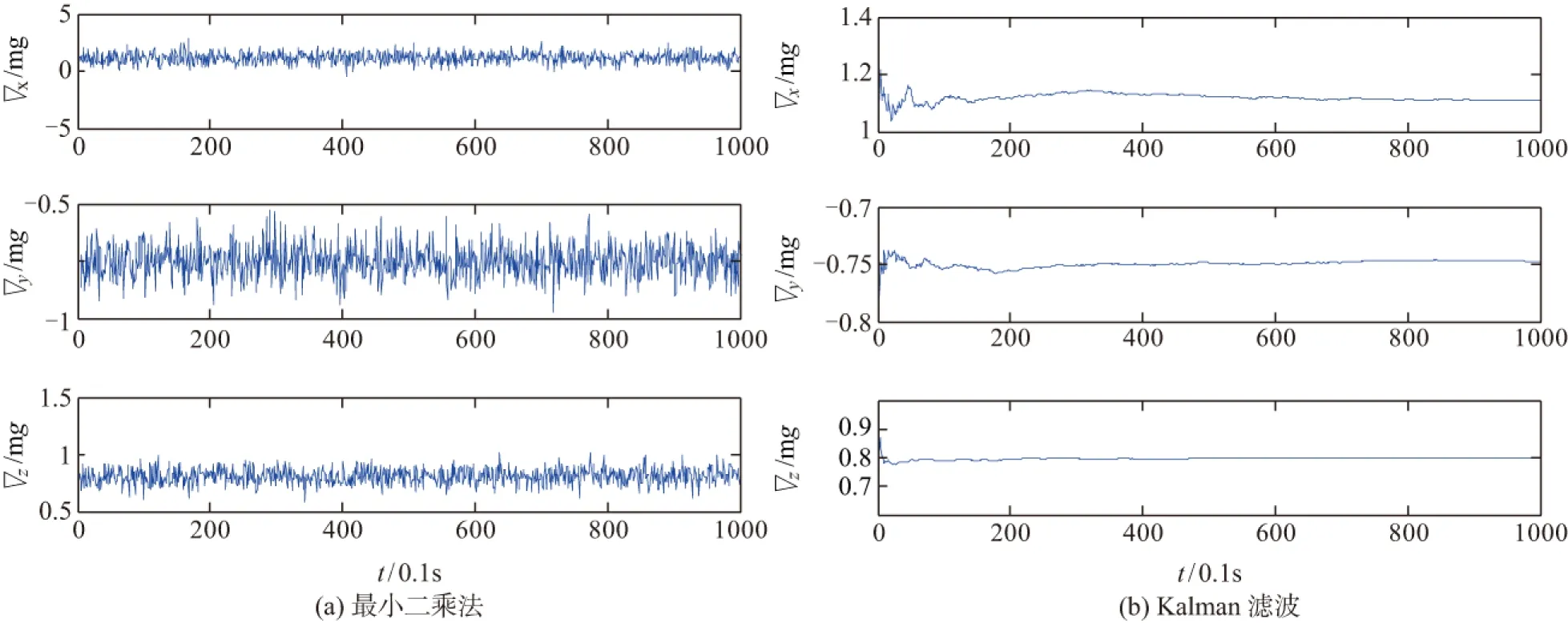
圖5 零偏估計過程Fig.5 Bias estimation process
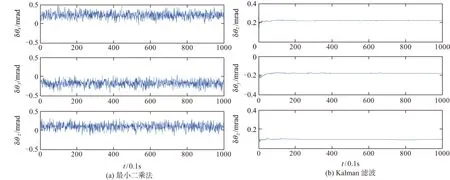
圖6 安裝誤差角估計過程Fig.6 Installation error angle estimation process
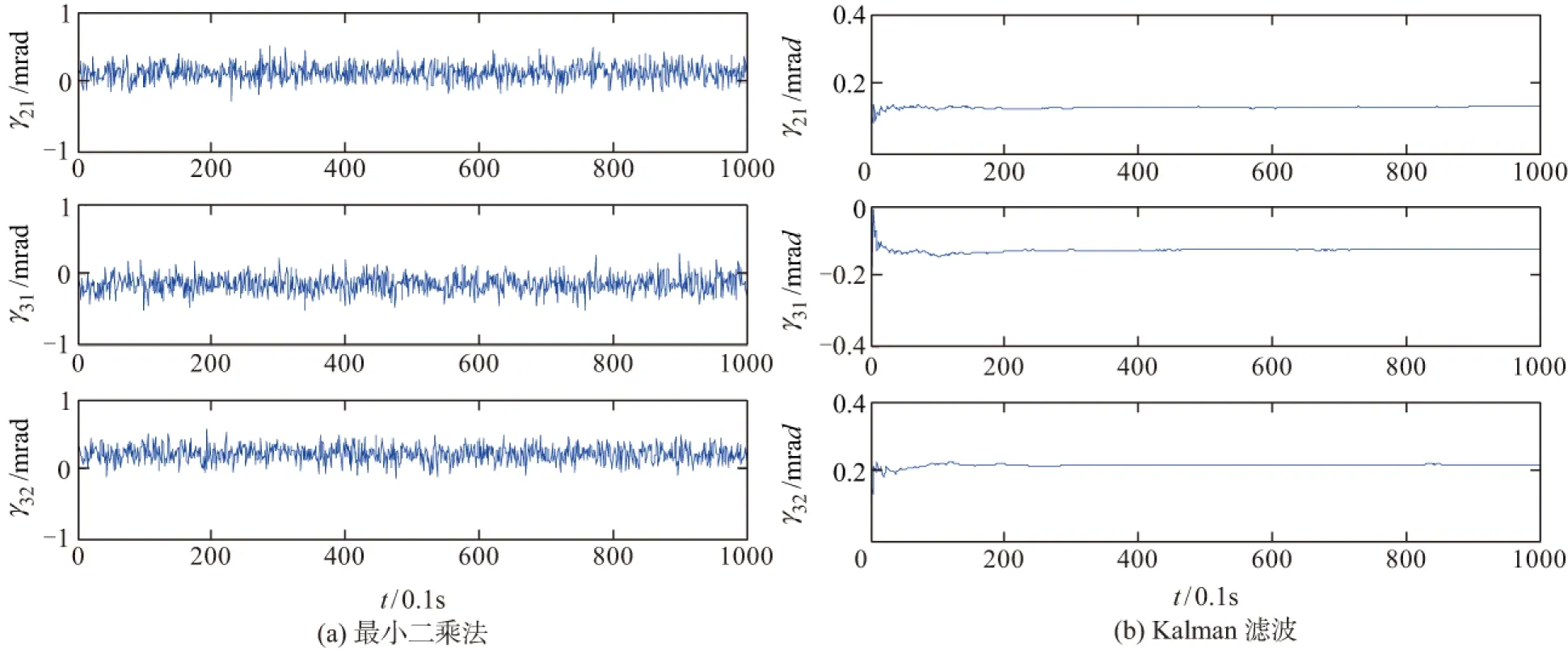
圖7 不正交度估計過程Fig.7 Non-orthogonality estimation process
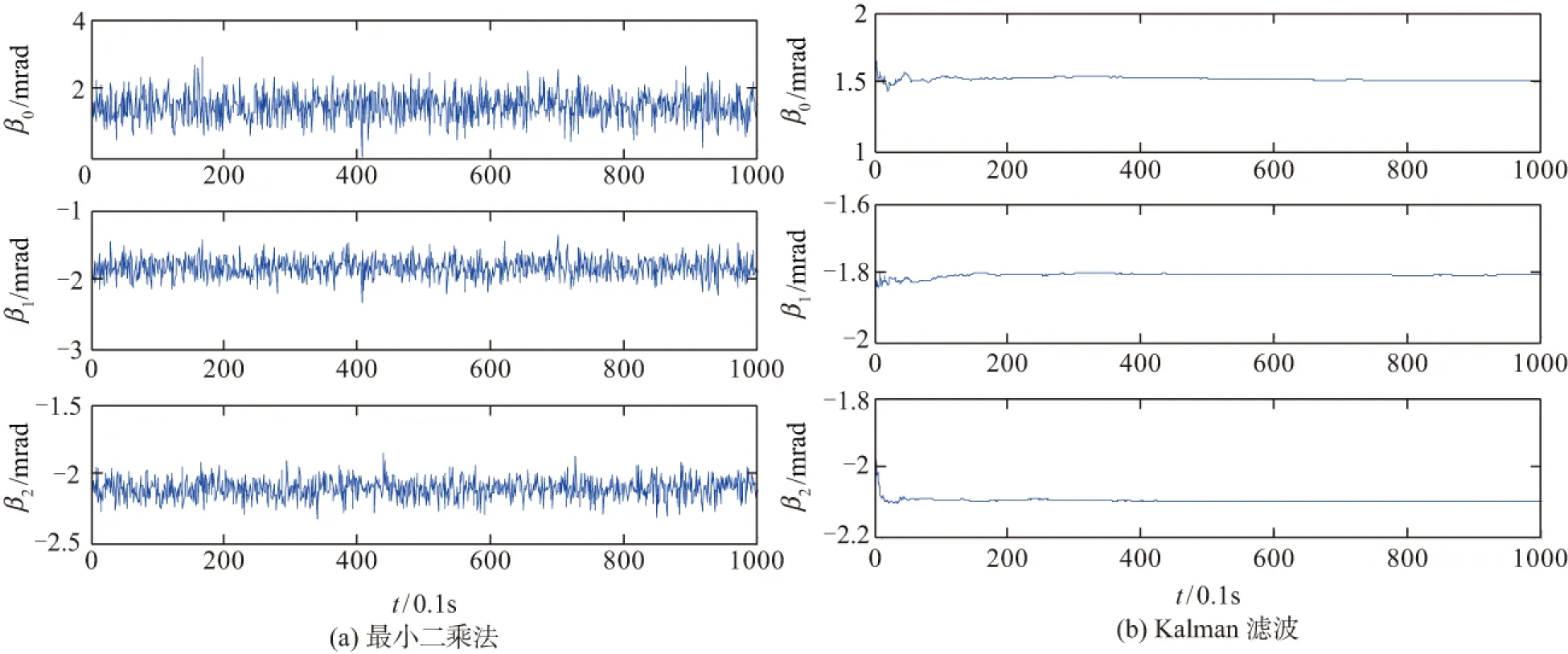
圖8 角位置誤差估計過程Fig.8 Angular position error estimation process
將濾波處理后的最小二乘結(jié)果與Kalman濾波估計結(jié)果進行對比,仿真結(jié)束時刻兩種方法給出的估計值的差值小于10-6,認為估計精度是一樣高的,但是Kalman濾波的收斂速度比濾波處理后的最小二乘法要快,因此后文的測試實例中將直接采用Kalman濾波來辨識誤差參數(shù)。
4 測試實例
依照測試方案分別進行了3次測試。實驗時IMU的采樣頻率設(shè)置為125Hz,每個位置的采樣時長為20min,3次實驗之間IMU斷電15min。表1為第一次測試的數(shù)據(jù)均值。表2為誤差參數(shù)辨識結(jié)果。
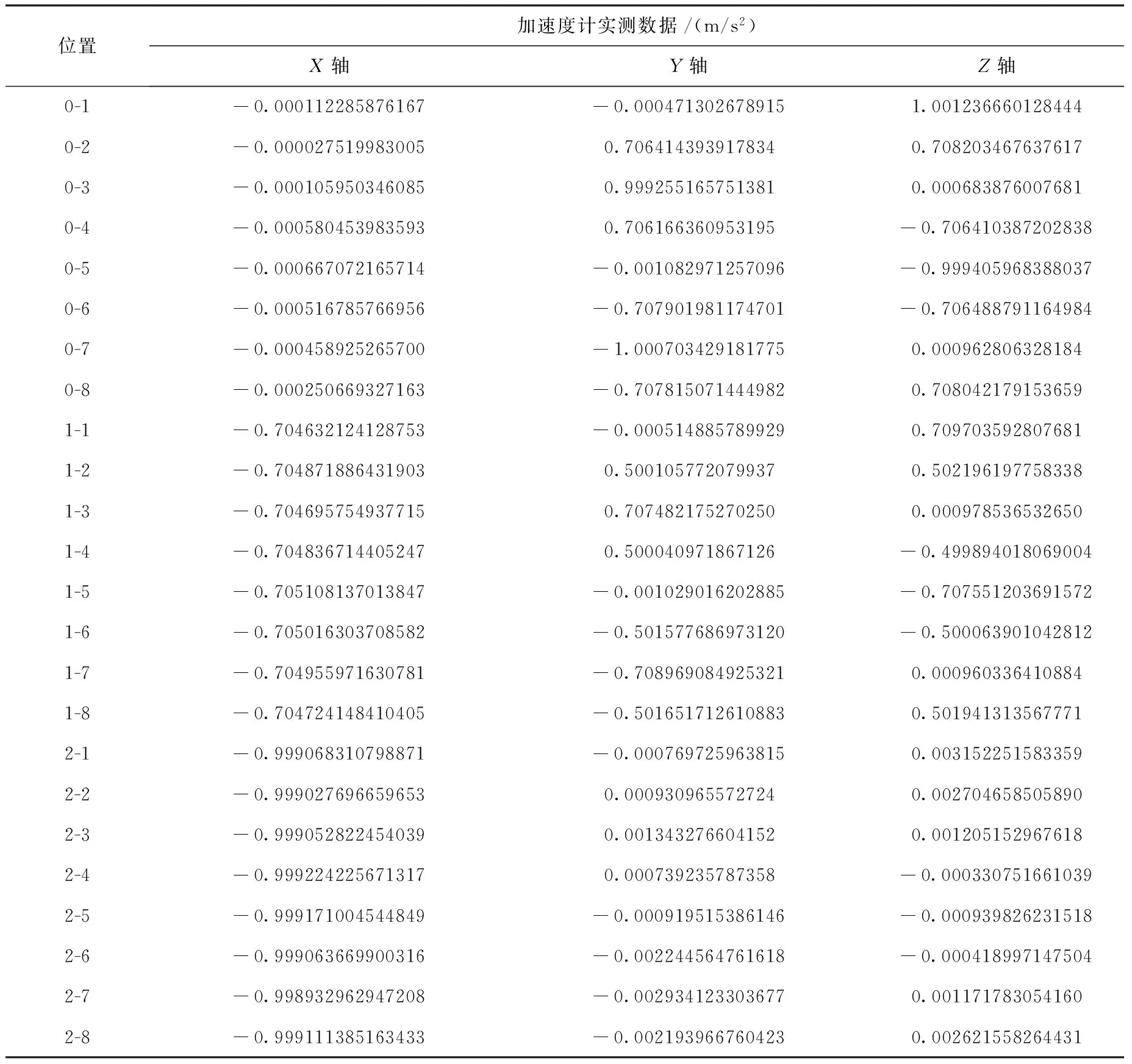
表1 第一次測試數(shù)據(jù)

表2 誤差系數(shù)標定結(jié)果(Kalman濾波)
4 標定結(jié)果分析
4.1 實驗重復性分析
由于實際模型參數(shù)不可知,只能通過多次標定進行標定參數(shù)的重復性檢驗。MEMS加速度計目前還沒有統(tǒng)一的測試標準,本文根據(jù)文獻[12]中給出的的慣性級SIMU多次標定重復性指標結(jié)合本次實驗測試,用MEMS加速度計的性能指標給出適用于MEMS加速度計測試的重復性指標:加速度計標度因數(shù)的相對誤差為5×10-4,安裝矩陣元素的絕對誤差為5mrad,三軸不正交度絕對誤差為2mrad,零偏的絕對誤差為1.5mg。
從表2可以看出,標定結(jié)果滿足重復性指標,說明該標定方法是可靠的。
4.2 殘差分析
根據(jù)式(8),殘差為
V=Z-HX
(12)
三次測試的殘差如表3所示。

表3 標定殘差
實測數(shù)據(jù)的1s標準差為1.2mg,100s標準差為0.7mg。從表3可以看出,3次實驗的標定殘差最大值均為±0.5mg左右,小于加速度計的量測噪聲,認為滿足精度要求,說明該方法是有效可行的。
5 結(jié)論
本文主要是提出了一種在單軸光柵分度頭上標定MEMS加速度計組合的測試方法,通過坐標變換得到了包含待標定誤差的重力加速度在加速度計敏感軸上的分量表達式。采用諧波分析法給出了誤差標定方程,相對于直接利用加速度計輸出值作為觀測量的方法大大減少了方程的維數(shù),從而減少了誤差辨識的計算量。分別用最小二乘法和Kalmam濾波對誤差參數(shù)進行了估計,仿真結(jié)果表明Kalmam濾波相對于最小二乘法收斂速度快、穩(wěn)定向好且精度高,能有效去除量測噪聲影響,提高標定精度。
為了驗證該方法的實用性進行了3次獨立的測試實驗,并對標定結(jié)果進行了分析。3次試驗標定結(jié)果的重復性滿足加速度計標度因數(shù)的相對誤差5×10-4,安裝矩陣元素的絕對誤差5mrad,三軸不正交度絕對誤差2mrad,零偏的絕對誤差1.5mg的重復性指標;殘差絕對值為0.5mg符合精度要求。該方法操作簡單,標定精度高,使得不具備精密轉(zhuǎn)臺設(shè)備的實驗室也可以標定高精度的MEMS加速度計組合,具有一定的工程實用價值。
[1] 宋麗君, 秦永元.MEMS加速度計的六位置測試法[J].測控技術(shù), 2009, 28(7): 11-13.
[2] 彭孝東, 張鐵民, 李繼宇, 閆國琦.三軸數(shù)字MEMS加速度計現(xiàn)場標定方法[J].振動、測試與診斷, 2014, 34(3):544-548.
[3] 任順清, 馮士偉, 馬向斌.加速度計的全組合標定方法[J].中國慣性技術(shù)學報, 2007,15(6):760-764.
[4] 董春梅, 陳希軍, 劉慶博, 任順清.正交雙加速度計兩種安裝位置在重力場中的標定方法[J].中國慣性技術(shù)學報, 2014, 22(5): 693-700.
[5] 孫楓, 曹通.基于Kalman濾波的加速度計十位置標定方法[J].系統(tǒng)工與電子技術(shù), 2011, 33(10):2272-2276.
[6] Babichenko A V, Shkred V K.Main error of inertial navigation systems[J].Engineering Physics, 2011, 11(3): 34-53.
[7] 李巍, 任順清, 趙洪波.慣性元件的失準角分離技術(shù)研究[J].哈爾濱工業(yè)大學學報, 2012, 44(1): 43-46.
[8] 陸辰, 李榮冰, 劉建業(yè), 杭義軍.微型航姿系統(tǒng)中三軸MEMS加速度計組合誤差建模方法[J].測試技術(shù)學報, 2011, 25(1):29-34.
[9] 薛亮, 李天志, 李曉瑩.基于MEMS傳感器的微型姿態(tài)確定系統(tǒng)研究[J].傳感技術(shù)學報, 2008, 21(3):457-460.
[10] 張紅良, 武元新, 練軍想, 吳文啟.基于轉(zhuǎn)臺誤差分析的高精度慣測組合標定編排改進[J].中國慣性技術(shù)學報, 2010, 18(1):129-134.
[11] 尹小恰.精密離心機工作半徑的測試方法與誤差分析[D].哈爾濱工業(yè)大學, 2013.
[12] 嚴恭敏, 李四海, 秦永元.慣性儀器測試與數(shù)據(jù)分析[M].北京: 國防工業(yè)出版社, 2012.
Calibration Method for MEMS Accelerometers Based on Dividing Head
GAO Kang,CHEN Xi-jun, REN Shun-qing
(Space Control and Inertial Technology Research Center, Harbin Institute of Technology,Harbin 150080,China)
This paper proposes a method for calibrating three-triad accelerometers on an indexing table.The calibrate scale factors, biases, misalignment angles of three input axes, and the pitch errors of the turntable were separated from the outputs of the accelerometers.Firstly, components of gravity in the accelerometer input axes are deduced by establishing a series of coordinate systems and propagating different attitude errors.After that, the calibration model equation is built by harmonic analysis method and the error parameters were estimated using the least square method and Kalman filter.Finally, the correctness of this method was verified by three independent experiments under the same condition.
MIMU calibration;MEMS accelerometer;Indexing turntable;Harmonic analysis method;Kalman filter
10.19306/j.cnki.2095-8110.2016.03.012
2015-12-19;
2016-01-05。
國家重大科學儀器設(shè)備開發(fā)專項(2013YQ310737)
高亢(1991-),女,在讀博士,主要從事捷聯(lián)慣導初始對準方面的研究。E-mail:condi_gk@163.com
V441
A
2095-8110(2016)03-0074-010
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
