一種艦載無人機(jī)IMU/GPS組合導(dǎo)航系統(tǒng)研究*
2016-03-15 04:46:21楊益興
艦船電子工程 2016年2期
楊益興
(海軍駐武漢701所軍事代表室 武漢 430064)
?
一種艦載無人機(jī)IMU/GPS組合導(dǎo)航系統(tǒng)研究*
楊益興
(海軍駐武漢701所軍事代表室武漢430064)
摘要針對(duì)艦載無人機(jī)的特點(diǎn),設(shè)計(jì)了一種適用于艦載無人機(jī)的低成本IMU/GPS組合導(dǎo)航系統(tǒng),提出了加入磁航向儀完成初始對(duì)準(zhǔn)和提供航向基準(zhǔn)的方法,并進(jìn)行了相應(yīng)仿真,仿真結(jié)果表明能滿足系統(tǒng)導(dǎo)航精度要求。
關(guān)鍵詞艦載無人機(jī); 慣性測(cè)量元件; 全球定位系統(tǒng); 組合導(dǎo)航
Study of IMU/GPS Composed Navigation System for Shipboard UAV
YANG Yixing
(Navy Representative Office in Wuhan 701 Research Institute, Wuhan430064)
AbstractIn view of the characteristics of shipboard unmanned aerial vehicle(UAV), a IMU/GPS composed navigation system is designed at a low cost. In this design, magnetic course indicator is used to complete initial alignment and provide heading reference. Simulation results indicate that the precision of the navigation system is able to satisfy the requirements of UAV.
Key Wordsshipboard UAV, IMU, GPS, composed navigation
Class NumberV249
1引言
艦載無人機(jī)以成本低、體積小、作戰(zhàn)靈活、無生命危險(xiǎn)等優(yōu)勢(shì),得到了世界各國海軍的廣泛認(rèn)可。為滿足未來艦艇作戰(zhàn)的需要,長(zhǎng)航時(shí)成為艦載無人機(jī)的一個(gè)發(fā)展方向,這就對(duì)導(dǎo)航定位精度提出了很高的要求。同時(shí),艦載無人機(jī)還要求其導(dǎo)航系統(tǒng)應(yīng)當(dāng)體積小、重量輕。本文在考慮艦載無人機(jī)特點(diǎn)及其對(duì)導(dǎo)航定位需求的基礎(chǔ)上,設(shè)計(jì)出一種低成本的IMU/GPS組合導(dǎo)航定位系統(tǒng)[1~3]。
2系統(tǒng)組成
導(dǎo)航系統(tǒng)可采用IMU(慣性測(cè)量元件)+GPS OEM板+磁航向儀(電子羅盤)實(shí)現(xiàn)[4]。其總體方案如圖1所示。
1) IMU(慣性測(cè)量元件)
由三個(gè)微加速度計(jì)和微陀螺儀組成,能夠輸出三軸的角速度和線加速度。與傳統(tǒng)的慣性傳感器相比,具有體積小、重量輕、成本低、功耗低、可靠性高和壽命長(zhǎng)等優(yōu)點(diǎn),體積10cm×10cm×10cm左右,重量0.5kg~1.5kg,功耗2W~10W余。因而非常適合無人機(jī)上使用。然而由于精度比較低,必須和GPS組合使用。
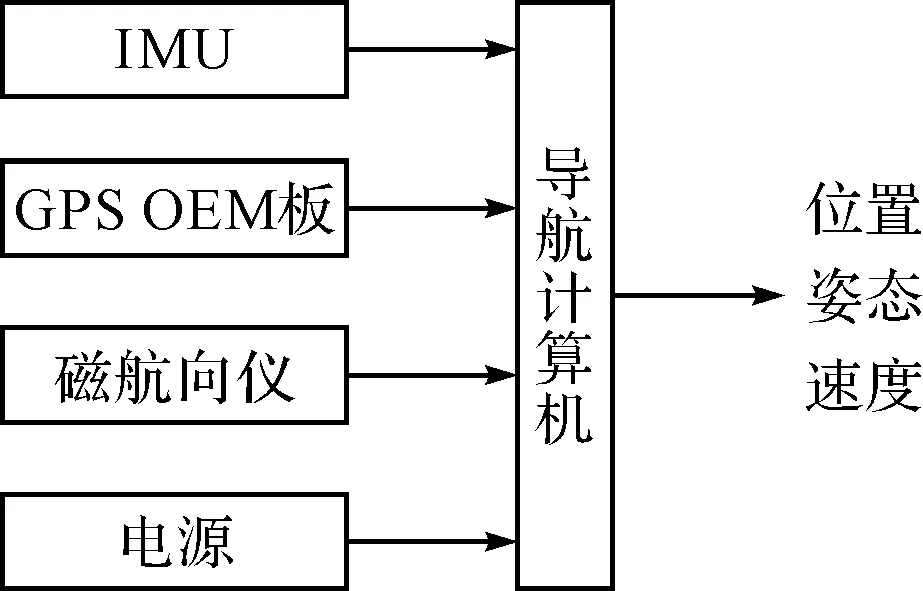
圖1 無人機(jī)組合導(dǎo)航系統(tǒng)總體框圖
IMU主要作用在于提供無人機(jī)姿態(tài)信息和較高頻率的數(shù)據(jù)輸出[4]。
2) GPS OEM板
為減輕無人機(jī)負(fù)載,機(jī)上GPS采用OEM板。大小幾厘米到十幾厘米見方,厚度1cm~2cm,重量幾克到幾十克,功耗數(shù)瓦[5]。
3) 磁航向儀
使用磁敏感器件感測(cè)地球磁場(chǎng)的方向,即磁子午線方向,并給出飛機(jī)縱軸相對(duì)磁子午線在水平面內(nèi)的夾角,及磁航向角。經(jīng)過磁差補(bǔ)償獲得真航向。大小數(shù)厘米見方,重量幾十克,功耗數(shù)瓦[6]。
磁航向儀作用是幫助IMU實(shí)現(xiàn)初始方位對(duì)準(zhǔn)。由于慣導(dǎo)系統(tǒng)方位對(duì)準(zhǔn)精度主要受陀螺漂移的影響,對(duì)于高精度的慣導(dǎo)系統(tǒng),對(duì)準(zhǔn)精度可以達(dá)到幾個(gè)角分,但是對(duì)于低成本的IMU,方位對(duì)準(zhǔn)精度為幾度或者十幾度,其陀螺漂移大于地球自轉(zhuǎn)角速度,不能自主完成方位對(duì)準(zhǔn),因而在總體方案中加入磁航向儀,利用磁航向儀給出的航向代替初始對(duì)準(zhǔn)時(shí)的航向角ψ。同時(shí)磁航向儀也可作為無人機(jī)飛行時(shí)的航向基準(zhǔn)[7~8]。
4) 導(dǎo)航計(jì)算機(jī)
主要完成數(shù)據(jù)采集、慣導(dǎo)初始對(duì)準(zhǔn)、姿態(tài)解算,定位解算、速度解算、組合導(dǎo)航解算等。可以是單獨(dú)的計(jì)算機(jī),也可以和飛行控制、通訊用計(jì)算機(jī)合二為一。根據(jù)高性能、低功耗、支持串口,具有數(shù)據(jù)存儲(chǔ)功能等要求,可采用ARM等嵌入式模塊[9]。
5) 電源
供給IMU、GPS、磁航向儀、計(jì)算機(jī)所需的直流電。
3組合導(dǎo)航方案
本文采用集中Kalman濾波器作為組合導(dǎo)航算法,組合方式見圖2,采用松散組合,即將IMU和GPS計(jì)算輸出的位置和速度信息的差值,以及IMU與磁航向儀輸出的航向信息差值作為量測(cè)值,送入Kalman濾波器估計(jì)IMU的誤差,然后對(duì)IMU進(jìn)行校正。整個(gè)結(jié)構(gòu)如圖2所示。這種組合方式比較簡(jiǎn)單,易于工程實(shí)現(xiàn),并且系統(tǒng)間仍然獨(dú)立工作,使導(dǎo)航信息有一定的冗余度。
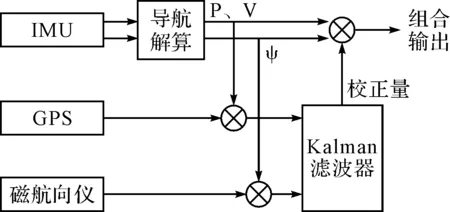
圖2 組合方式
3.1組合導(dǎo)航系統(tǒng)狀態(tài)方程和量測(cè)方程
慣導(dǎo)系統(tǒng)誤差方程為[10]
其中
XINS=[δLI,δλI,δhI,δvIE,δvIN,δvIU,

δKgx,δKgy,δKgz,δKax,δKay,δKaz]T
GPS位置和速度誤差視為一階馬爾可夫過程,其誤差方程為
其中XGPS=[δLGPSδλGPSδhGPSδvEGPSδvNGPSδvUGPS]T
磁航向儀的航向誤差視為一階馬爾可夫過程
組合導(dǎo)航系統(tǒng)的狀態(tài)方程為
(1)
量測(cè)方程為
(2)
3.2卡爾曼濾波方程
將式(1)、(2)離散化可得
Kalman濾波方程為
4仿真結(jié)果
根據(jù)組合導(dǎo)航方案,按照如下初始條件,分別進(jìn)行了IMU和IMU/GPS/磁航向儀組合導(dǎo)航仿真。
初始條件:
初始速度:25m/s,航向135°,高度0m,俯仰角15°;
加速度計(jì):零偏重復(fù)性:2mg;隨機(jī)偏差:0.3mg;比例因子穩(wěn)定性:0.2%;
GPS:水平定位精度:1.8m(1σ),垂直定位精度:5m(1σ),速度誤差0.1m/s(1σ);
磁航向儀:航向精度:0.5°(1σ);
航跡:爬升2500m→平飛2000s→轉(zhuǎn)彎40°→平飛2900s。
由于篇幅有限,只給出二維位置誤差仿真結(jié)果,如圖3~圖6所示。
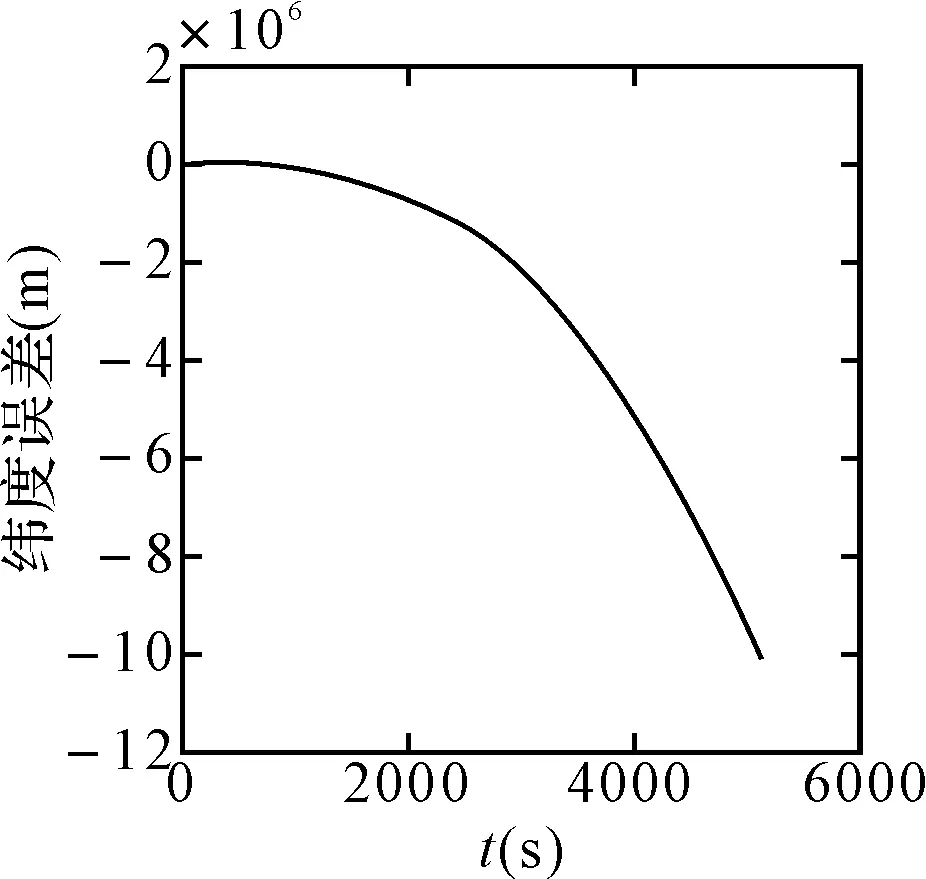
圖3 IMU緯度誤差
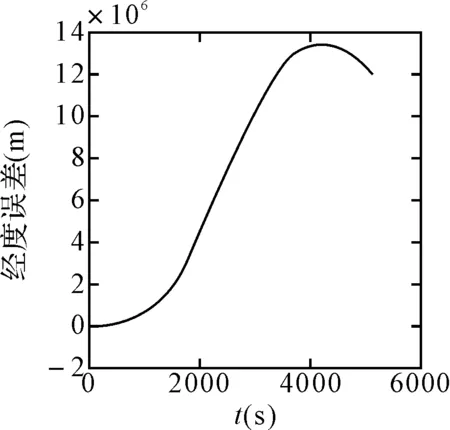
圖4 IMU經(jīng)度誤差
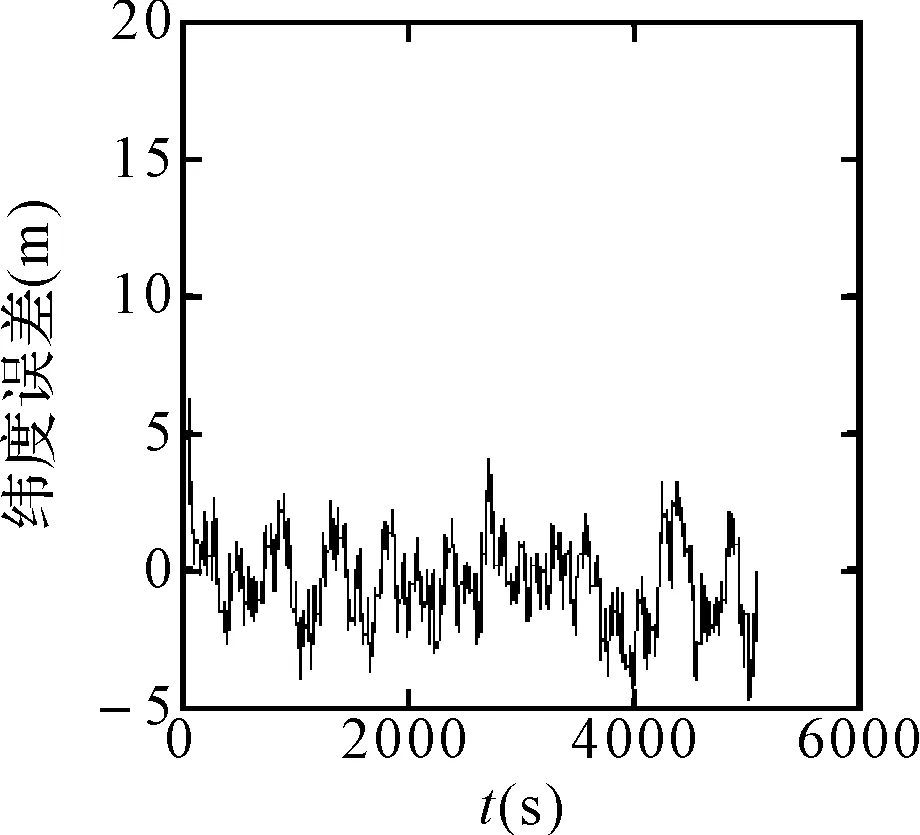
圖5 組合導(dǎo)航緯度誤差
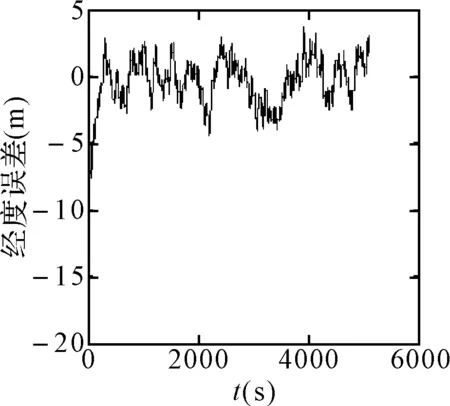
圖6 組合導(dǎo)航經(jīng)度誤差
從仿真結(jié)果可以看出:
1) 從仿真結(jié)果可以看出IMU漂移很大,無法單獨(dú)使用,但在一分鐘內(nèi)定位精度可以保證在100m以內(nèi),因而可以作短時(shí)使用。
2) 由于IMU精度較低,整個(gè)導(dǎo)航系統(tǒng)精度主要取決于GPS精度,因而要根據(jù)系統(tǒng)導(dǎo)航精度指標(biāo)要求選取相應(yīng)的GPS。如果想減小工作量,也可以直接利用GPS和磁航向儀輸出修正慣導(dǎo)結(jié)果,精度影響不大,但輸出波動(dòng)比較大。
5結(jié)語
在考慮艦載無人機(jī)特點(diǎn)及其對(duì)導(dǎo)航定位需求的基礎(chǔ)上,本文提出了一種IMU+GPS-OEM板+磁航向儀的組合導(dǎo)航方案。仿真結(jié)果表明,系統(tǒng)導(dǎo)航精度主要由GPS保證,而IMU則保證導(dǎo)航數(shù)據(jù)具有較高的更新率和提供姿態(tài)信息,兩者互為補(bǔ)充,提高了系統(tǒng)的可靠性和抗干擾能力,組合導(dǎo)航系統(tǒng)在精度和可靠性方面,較單一的導(dǎo)航系統(tǒng)都有明顯的改善。
參 考 文 獻(xiàn)
[1] 高嘉景.海軍艦載無人機(jī)的現(xiàn)狀及其發(fā)展趨勢(shì)[J].艦船電子工程,2004,24(3):16-18.
[2] 張小紅,郭斐,李星星.GPS/GLONASS組合精密單點(diǎn)定位研究[J].武漢大學(xué)學(xué)報(bào),2010,35(1):9-12.
[3] 劉慶元,郝立良,黃書捷,等.改進(jìn)的UKF在GPS/INS組合導(dǎo)航中的應(yīng)用[J].測(cè)繪科學(xué)技術(shù)學(xué)報(bào),2014,31(5):450-453.
[4] 郭雪蛟,周海銀,潘曉剛.抑制UKF發(fā)散的改進(jìn)算法在衛(wèi)星軌道確定中的應(yīng)用[J].上海航天,2012,29(6):26-31.
[5] 汪秋婷.自適應(yīng)抗差UKF在衛(wèi)星組合導(dǎo)航中的理論與應(yīng)用研究[D].武漢:華中科技大學(xué),2010:11-12.
[6] 王沖,曾慶軍.自適應(yīng)濾波算法在AUV組合導(dǎo)航中的方法[J].中南大學(xué)學(xué)報(bào):自然科學(xué)版,2013,44(7):155-159.
[7] 羅建軍.組合導(dǎo)航原理與應(yīng)用[M].西安:西北工業(yè)大學(xué)出版社,2012:60-80.
[8] 劉慶元,郝立良,黃書捷.神經(jīng)網(wǎng)絡(luò)輔助的GPS/MEMS-INS組合導(dǎo)航算法[J].測(cè)繪科學(xué)技術(shù)學(xué)報(bào),2014,31(4):336-341.
[9] 李星星,張小紅,李盼.固定非差整數(shù)模糊度的PPP快速精密定位定軌[J].地球物理學(xué)報(bào),2012,55(3):833-840.
[10] 秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導(dǎo)航原理[M].西安:西北工業(yè)大學(xué)出版社,1998:22-50.
中圖分類號(hào)V249
DOI:10.3969/j.issn.1672-9730.2016.02.009
作者簡(jiǎn)介:楊益興,男,高級(jí)工程師,研究方向:艦船電子武備設(shè)計(jì)與監(jiān)造。
*收稿日期:2015年8月3日,修回日期:2015年9月25日