飛機自動噴涂碰撞防護方法
2016-03-02 07:13:50劉晨,張波,賈沛
制造業自動化 2016年4期
劉 晨,張 波,賈 沛
(1.中航工業沈陽飛機工業(集團)有限公司;2.北京機械工業自動化研究所,)
0 引言
為實現飛機的自動噴涂,在國家重大專項資金的資助下,本課題研制了尾翼自動噴涂裝備[1],用于飛機尾翼,包括平尾和垂尾外表面的噴涂。
裝備是在現有人工噴涂廠房內改造完成,根據需要在整機狀態下進行噴涂。飛機采用牽引車牽引就位后不再進行調整。為了保證飛機定位的一致性。在地面施畫了輪胎引導線和前輪停止線,以便每次飛機停放在大致相同的位置。但由于飛機體型的巨大,微小的偏差都會帶來機翼末端位置的嚴重偏差。同時由于每臺飛機的狀態均不相同,包括航油重量、發動機是否安裝、輪胎氣壓等都會對飛機的姿態造成影響。
上述偏差都會對噴涂效果產生重大影響,甚至造成飛機與噴涂裝備發生碰撞。因此必須采取措施解決。
本文介紹噴涂裝備的結構和工作方式,以及由此帶來的安全性問題。并提出針對此類問題的解決方案。
1 裝備描述
1.1 噴涂系統
噴涂系統包括6自由度噴涂機器人、3自由度變位機、帶雙噴槍的延長桿,以及相關的輸供漆、控制等系統。
3自由度變位機實現機器人沿飛機寬度方向(X軸)、沿飛機前后方向(Y軸)和垂直方向(Z軸)的運動。其作用是擴大機器人可達范圍,滿足飛機水平尾翼和垂直尾翼空間分布距離遠,表面形狀復雜的噴涂需求。機器人安放在Z軸平臺上。
機械系統如圖1所示。

圖1 飛機尾翼自動噴涂系統
延長桿加裝在機器人手腕部,延長桿末端安裝扇面相互垂直的兩把噴槍,以增加編程便利性。噴槍安裝方式如圖2所示。
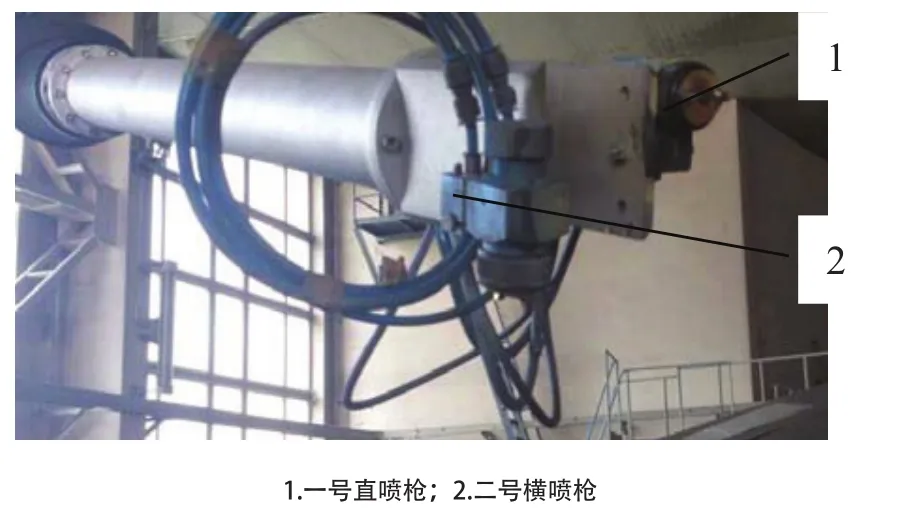
圖2 雙噴槍系統
1.2 位置檢測系統
為解決引言中提出是飛機定位問題,目前采用的方法有兩種,一種是應用調整裝置調整飛機位姿,使飛機與噴涂裝備處于相對固定的位置。F-35整機噴涂即采用移動臺車(Paint Cell Dolly)進行飛機水平和高度的調整[2];另一種方法是測量飛機的位姿[3],調整噴涂裝備來適應偏差。課題采用的是第二種方式。
課題采用激光跟蹤儀作為檢測儀器,在機器人示教過程中確定模型飛機與噴涂裝備之間的位置關系,設定飛機坐標系與機器人坐標系重合,在飛機坐標系下進行編程。該方法在課題研制的進氣道噴涂系統中得到成功應用[4]。
2 工作方式
本課題采用的補償方式為:飛機定位后首先檢測實際飛機坐標系與示教飛機坐標系,即機器人坐標系之間的關系,確定飛機偏移量,由機器人更改末端位姿來完成偏移量補償。而3自由度外部軸仍然運動到原來設定位置。
由圖1中噴涂照片可以看出,雖然增加了變位機和延長桿,噴涂時裝備與飛機的距離仍然很近,特別是使用二號噴槍時。如直接進行噴涂作業,可能會出現機器人和變位機與飛機碰撞的危險。因此需要在正式噴涂前手動低速模擬噴涂過程,檢驗偏移補償的有效性和噴涂作業的安全性。
即便如此,由于人工操作存在不確定性,在進行模擬操作時仍有發生碰撞的可能性,因此需要在技術上采取措施。
3 解決方案
從根本上解決問題的方法是在機器人和變位機上安裝傳感器,在裝備與飛機碰撞前報警。目前通用機器人尚未集成碰撞檢測傳感器。一方面原因是機器人屬于多自由度機構,工作范圍大,很難預測哪些部位會發生碰撞;同時工業機器人技術目前發展非常成熟,公開報道的機器人事故通常發生在示教或者檢測、檢修時,安裝傳感器的必要性不大。
特殊應用場合,如AGV等,采用加裝傳感器的方式進行距離檢測,常用的傳感器有非接觸式測距和接觸式兩類。非接觸式測距通常采用激光、超聲波、紅外等測距,接觸式傳感器則多利用機械觸碰微動開關原理。
在噴涂環境下,由于漆霧中含有復雜金屬成分,激光和超聲波等傳感器無法正常工作,而一些接觸式傳感器普遍無法在爆炸環境應用。同時在裝備進行噴涂時,為防止漆霧落在機器人上,需要為機器人穿上防護罩,這也影響到傳感器的正常工作。
綜上所屬,在噴涂作業中很難進行飛機與裝備之間的位置檢測,比較可行的辦法是在模擬過程中進行檢測。
4 傳感器應用
本課題采用了工業無線網絡進行組網,用激光傳感器進行測距。實現了測量數據的非接觸采集、集中處理和無線傳輸三種功能。
無線網絡模塊采用了美國邦納的無線模塊,模塊主要包括DX80網關、DX80節點、FlexPower和DX81 FlexPower 電池模塊。模塊組成和系統框圖如圖3、4所示。其中測距傳感器與節點聯接,與節點、電源模塊共同組成移動單元,設備通過磁性安裝附件安裝在機械臂和變位機上。網關通過網線與主控PLC聯接。

圖3 無線模塊組成
移動測量模塊在進行模擬噴涂時安裝,噴涂時移除。
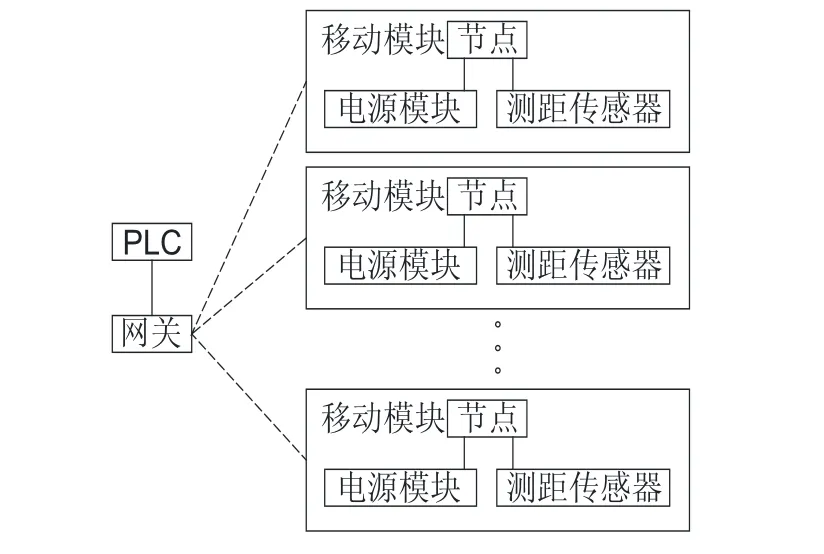
圖4 系統框圖
采用無線網絡的優點是:
1)噴涂時可方便的移除移動模塊,不影響噴涂系統正常工作。
2)不需要額外的布線,方便操作,也降低了安裝及調試成本。
3)可靈活布置傳感器位置,以適應飛機位置偏差。
5 結論
通過安裝無線測量網絡,可以極大的避免噴涂裝備與飛機方式碰撞的危險性,在目前的技術條件下不失為一種可行的辦法。
[1] 趙宏劍,王剛,張波,等.飛機尾翼自動噴涂系統,制造業自動化,第35卷,第1期(下),pp153-156.
[2] Seegmiller N A. Precision robotic coating application and thickness control optimization for F-35 final finishes[J].SAE Journal, 2010 (3).
[3] 石聞.F-22 戰斗機的機器人表面噴涂,航空工程與維修,1997年08,pp22,38.
[4] 王崇,張波,趙宏劍,季旭東.激光跟蹤儀在飛機噴涂中的應用,制造業自動化,第35卷,第9期(下),pp78-79.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45