基于RSSI測距的煤礦井下人員定位算法的改進
2016-02-22 20:46:44張亮唐超禮
科技視界 2016年4期
張亮 唐超禮
【摘 要】目前,基于RSSI測距的煤礦井下人員定位算法是國內外井下人員定位常用的一種算法。可是RSSI測距由于受到井下障礙物的隔離以及節點間的相互干擾等因素,常常導致測距產生誤差較大,此時如果再用傳統的簡單點,構成四個定位三角小區,根據定位三角小區各個三角頂點歸屬的定位三角小區個數的不同,進行加權的求三角形質心的方法定位井下人員的位置時,可能偏差會比較大。針對這一問題,本文提出選取四個定位節定位算法,近而提高定位精度。
【關鍵詞】RSSI測距;井下人員定位;三邊定位;三角定位
0 引言
隨著我國經濟發展,對煤炭能源的需求越來越大,煤炭行業快速發展。目前,不論是國內,還是在國外,煤礦的作業環境基本都是在地下作業。相比較地上作業,礦井的地下作業環境惡劣,瓦斯、一氧化碳等有害氣體的存在、煤礦井下巖石塌陷滑落等諸多不利因素給井下作業帶來了諸多潛在危險。一旦發生事故,井下人員定位的精確性對井下人員救援工作的效率具有至關重要的作用。
現階段,國內外井下人員定位系統中,普遍選用基于測距技術的人員定位算法。通過對接收到的信號中特定參數進行處理,來測定節點間的距離。現階段常用的RSSI(Received Signal Strength Indication)測距就是目前比較成熟的一種基于測距技術的人員定位算法。測量出未知節點(井下工作人員)到三個已知節點(固定的)的距離,然后利用三邊定位算法定位工作人員的位置。然而實際情況下,由于節點間的干擾,井下環境影響等,使得節點間的實測距離有一定偏差,最終導致三邊測量無法實現,進而采用三角定位算法。
1 傳統RSSI人員定位介紹
1.1 RSSI測距
傳統的RSSI人員定位算法的基礎是RSSI測距(Received Signal Strength Indication)技術。也就是通過接收到的信號強度計算出節點間的距離。其中,接受到的信號強度與節點間的距離滿足關系式:
[RSSI]=A-10nlgd
關系式中,A為信號傳輸1m時,接收端接收到的信號功率,單位為dBm。上式中,n為路徑損耗指數,表示信號傳輸過程中,隨路徑增加而衰減的速度。A與n都是與環境相關的參數,在不同的環境下,A與n的值是是不同的。相對于一個特定的環境下,可以認為A與n是相對固定的值。d為信號發送節點與信號接收節點間的距離。當在某個特定環境下將A、n確定后,接收到的信號強度和收、發節點間距離d便是一一對應關系,通過接收到的信號強度值便可以由上式計算出收、發節點間的距離d。
1.2 三邊定位算法
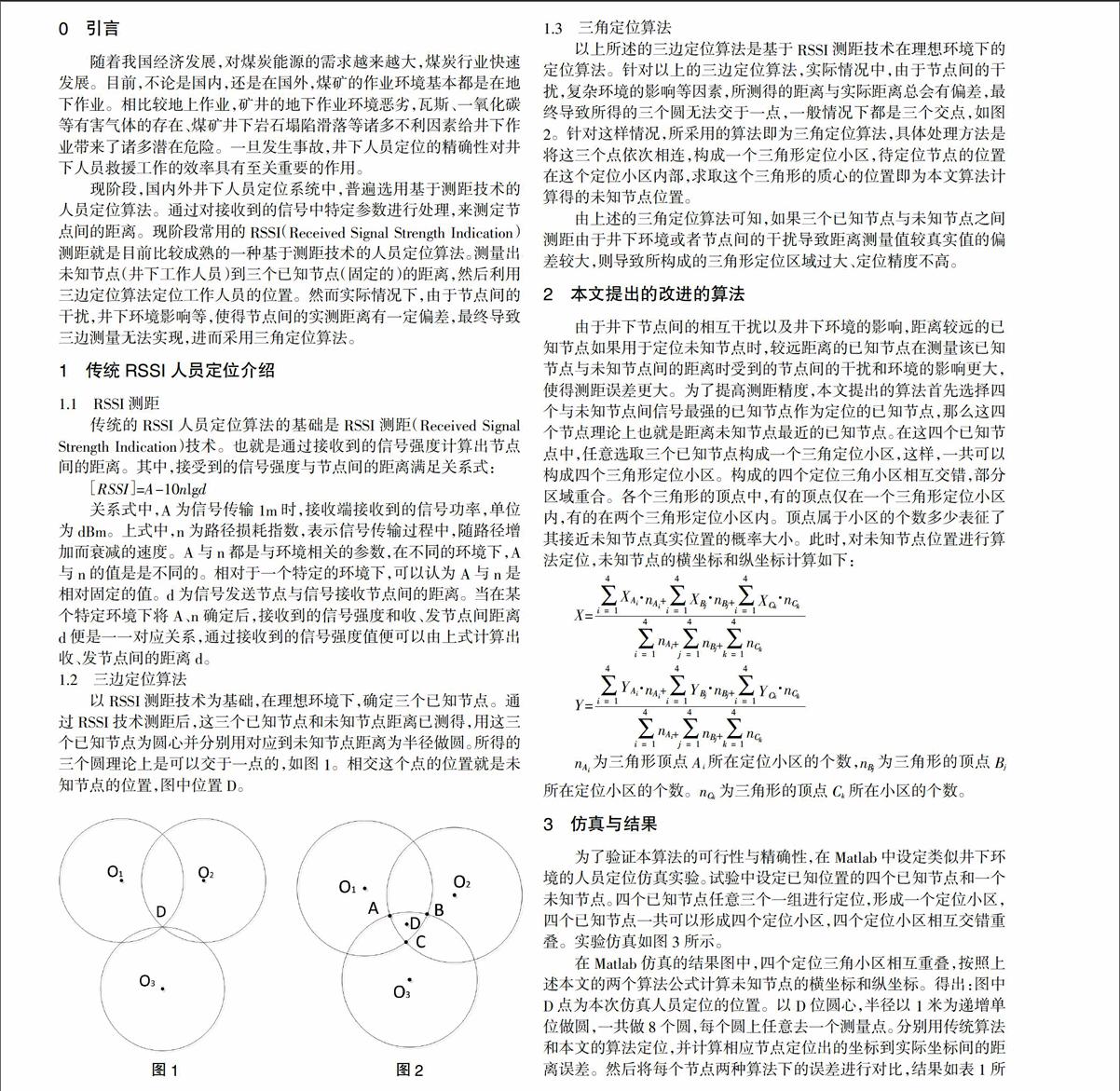
以RSSI測距技術為基礎,在理想環境下,確定三個已知節點。通過RSSI技術測距后,這三個已知節點和未知節點距離已測得,用這三個已知節點為圓心并分別用對應到未知節點距離為半徑做圓。所得的三個圓理論上是可以交于一點的,如圖1。相交這個點的位置就是未知節點的位置,圖中位置D。
1.3 三角定位算法
以上所述的三邊定位算法是基于RSSI測距技術在理想環境下的定位算法。針對以上的三邊定位算法,實際情況中,由于節點間的干擾,復雜環境的影響等因素,所測得的距離與實際距離總會有偏差,最終導致所得的三個圓無法交于一點,一般情況下都是三個交點,如圖2。針對這樣情況,所采用的算法即為三角定位算法,具體處理方法是將這三個點依次相連,構成一個三角形定位小區,待定位節點的位置在這個定位小區內部,求取這個三角形的質心的位置即為本文算法計算得的未知節點位置。
由上述的三角定位算法可知,如果三個已知節點與未知節點之間測距由于井下環境或者節點間的干擾導致距離測量值較真實值的偏差較大,則導致所構成的三角形定位區域過大、定位精度不高。
2 本文提出的改進的算法
由于井下節點間的相互干擾以及井下環境的影響,距離較遠的已知節點如果用于定位未知節點時,較遠距離的已知節點在測量該已知節點與未知節點間的距離時受到的節點間的干擾和環境的影響更大,使得測距誤差更大。為了提高測距精度,本文提出的算法首先選擇四個與未知節點間信號最強的已知節點作為定位的已知節點,那么這四個節點理論上也就是距離未知節點最近的已知節點。在這四個已知節點中,任意選取三個已知節點構成一個三角定位小區,這樣,一共可以構成四個三角形定位小區。構成的四個定位三角小區相互交錯,部分區域重合。各個三角形的頂點中,有的頂點僅在一個三角形定位小區內,有的在兩個三角形定位小區內。頂點屬于小區的個數多少表征了其接近未知節點真實位置的概率大小。此時,對未知節點位置進行算法定位,未知節點的橫坐標和縱坐標計算如下:
nAi為三角形頂點Ai所在定位小區的個數,nBj為三角形的頂點Bj所在定位小區的個數。nCk為三角形的頂點Ck所在小區的個數。
3 仿真與結果
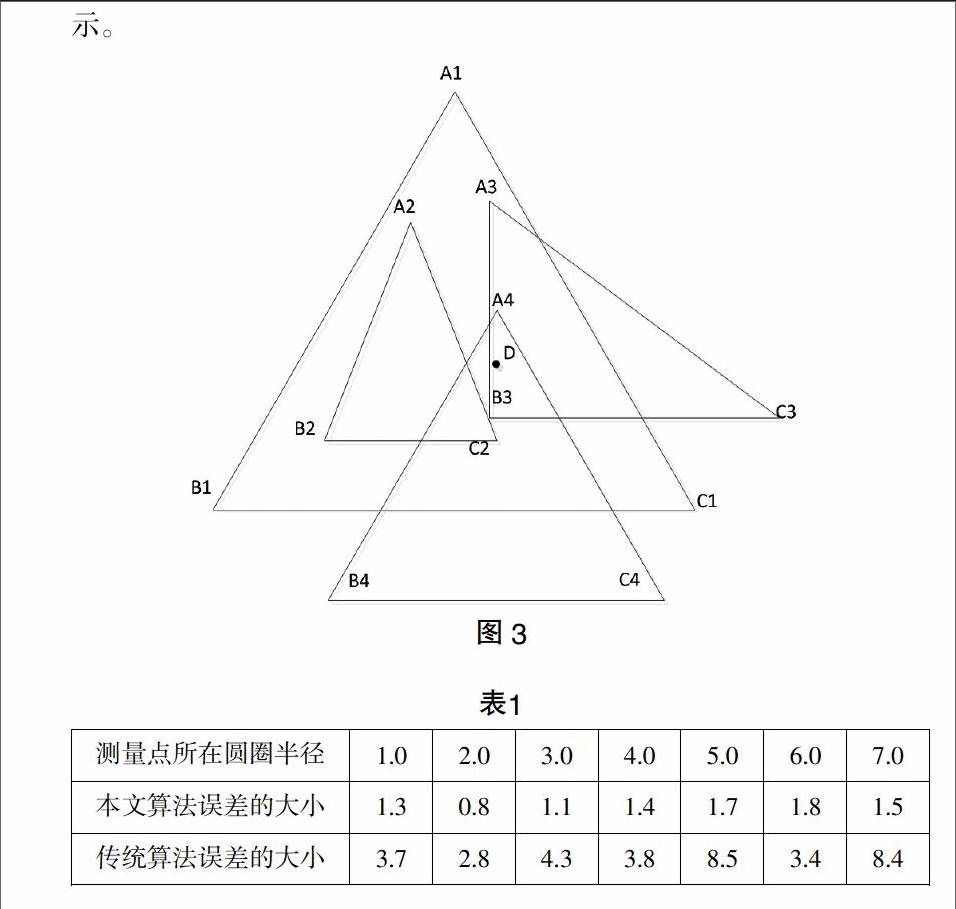
為了驗證本算法的可行性與精確性,在Matlab中設定類似井下環境的人員定位仿真實驗。試驗中設定已知位置的四個已知節點和一個未知節點。四個已知節點任意三個一組進行定位,形成一個定位小區,四個已知節點一共可以形成四個定位小區,四個定位小區相互交錯重疊。實驗仿真如圖3所示。
在Matlab仿真的結果圖中,四個定位三角小區相互重疊,按照上述本文的兩個算法公式計算未知節點的橫坐標和縱坐標。得出:圖中D點為本次仿真人員定位的位置。以D位圓心,半徑以1米為遞增單位做圓,一共做8個圓,每個圓上任意去一個測量點。分別用傳統算法和本文的算法定位,并計算相應節點定位出的坐標到實際坐標間的距離誤差。然后將每個節點兩種算法下的誤差進行對比,結果如表1所示。
圖3
表1
實驗結果表現為在八組數據中,傳統算法的誤差相比較本文提出的改進后的算法的誤差普遍偏大,而且傳統算法相比較本文的算法測量誤差相對波動性也更大一些。可見,本文提出的改進后的算法定位未知節點的精度更高,定位的誤差的穩定性也更好點。
【參考文獻】
[1]孫晶晶.基于ZigBee的井下人員定位技術研究[D].燕山大學,2013.
[2]張程遠,董增壽.基于RSSI測距的井下人員定位算法改進[J].太原科技大學學報,2014,05:323-327.
[3]張鶴丹.基于WiFi技術的井下人員定位系統研究[D].西安建筑科技大學,2013.
[4]徐麗.基于RFID的礦井人員定位系統的設計[D].太原理工大學,2013.
[責任編輯:王楠]
