海洋水色遙感交叉定標精度分析與仿真
2016-02-21 06:07:42高慧婷馬越劉薇何紅艷
航天返回與遙感 2016年2期
高慧婷 馬越 劉薇 何紅艷
(北京空間機電研究所,北京 100094)
海洋水色遙感交叉定標精度分析與仿真
高慧婷 馬越 劉薇 何紅艷
(北京空間機電研究所,北京 100094)
交叉定標是解決海洋水色遙感器在軌高頻次、業務化絕對輻射定標問題的重要手段,為了研究交叉定標方法對定標精度的影響,文章介紹了基于譜段匹配和光譜重構兩種交叉定標方法并分析其影響因素。仿真方案針對我國“海洋一號”系列衛星海洋水色水溫掃描儀(COCTS)可見近紅外譜段交叉定標,結合國際典型參考遙感器光譜響應特性,基于實測水體光譜反射率數據,對比了在不同水體反射特性、大氣條件及遙感器光譜響應下兩種交叉定標模型引入的誤差。仿真結果表明:光譜重構法交叉定標精度總體上優于譜段匹配法,參考遙感器光譜分辨率為 5nm時,光譜重構法模型引入誤差小于0.05%,對比結果為海洋水色遙感器交叉定標方法選擇提供支持。
海洋水色遙感 交叉定標 譜段匹配 光譜重構 航天遙感
0 引言
海洋衛星水色遙感是海洋環境與災害監測數據的重要獲取手段,遙感器在軌絕對輻射定標精度直接影響遙感數據的定量化應用水平[1]。我國已經發射了2顆海洋水色遙感衛星“海洋1A”(2002年5月)和“海洋1B”(2007年4月),計劃2017年后發射后續海洋水色衛星“海洋1C”和“海洋1D”,主載荷水色水溫掃描儀繼承了“海洋1A/1B”星水色水溫掃描儀(COCTS)譜段設置,在我國水色遙感衛星目前沒有配置載荷專用星上定標系統的情況下,場地定標無法滿足水色遙感器高頻次業務化定標需求,交叉定標成為水色遙感在軌絕對輻射定標的主要手段之一,蔣興偉等[2]、潘德爐[3]利用美國寬視場掃描儀 SeaWiFS對“海洋 1A/1B”星 COCTS進行交叉定標,并對交叉定標后 COCTS數據反演與準同步SeaWiFS數據反演的歸一化離水輻亮度進行了比較。在海洋環境遙感相關領域,唐軍武[4]利用 MODIS對“中巴資源”衛星CBER-02上的4波段CCD相機進行交叉定標,獲得絕對輻射定標系數;周冠華[5]等利用EO-1/Hyperion對環境小衛星超光譜成像儀(HJ1A/HSI)進行交叉定標,解決了星載成像光譜儀光譜通道設置差異大導致的交叉定標精度低的問題。
“海洋1C/1D”星計劃攜帶用于水色水溫掃描儀交叉定標的參考遙感器,本文以參考遙感器定標模式為研究背景,對基于譜段匹配和光譜重構交叉定標方法進行了建模仿真,基于實測水體光譜反射率數據開展交叉定標方法對輻射定標精度的影響分析,分析兩種方法的影響因素,比較兩種不同定標模型引起的交叉定標不確定性,為水色遙感器業務化在軌交叉定標方案確定提供依據。
1 水色儀在軌交叉定標
1.1 交叉定標及影響因素分析
交叉定標法是利用輻射定標精度較高的參考遙感器對目標遙感器進行定標,選擇參考遙感器和目標遙感器對同一區域同步或準同步獲取的影像,通過幾何配準和光譜響應匹配,建立兩個遙感器圖像之間的聯系,利用參考遙感器定標系數計算目標遙感器的定標系數。
影響交叉定標精度的因素包括:
1)定標源誤差:參考遙感器絕對輻射定標誤差;
2)光譜匹配誤差:包括數據匹配誤差(軌道匹配、空間匹配、時間匹配、觀測幾何匹配誤差)和光譜響應誤差(由光譜參數包括譜段差異和光譜響應函數差異引起的光譜響應誤差)[6];
3)相對定標誤差:由于交叉定標只對圖像局部小區域進行絕對定標,如果以局部輻射定標結果代替全視場定標結果,絕對輻射精度受其相對輻射校正精度影響;
4)其他因素引起的誤差。其中,參考遙感器絕對輻射定標誤差和目標遙感器相對輻射定標誤差是由遙感器本身輻射定標誤差決定的,是交叉定標的固有誤差,為了對比兩種模型的精度,本文假設在兩個衛星平臺交叉點進行定標,此時兩臺遙感器同時對同地物成像,則光譜匹配不確定性中的地物匹配、時間匹配和幾何匹配不確定性可以忽略,主要考慮由光譜響應匹配不確定性引起的交叉定標方法誤差。
1.2 基于譜段匹配的交叉定標
基于譜段匹配的交叉定標是目前應用最多的交叉定標方法,要求參考遙感器與目標遙感器具有近似的光譜響應函數或接近的譜段中心波長[7]。
基于譜段匹配的交叉定標輻亮度基法為:根據參考遙感器各通道定標系數krei、crei與定標區域響應灰度值DNrei,計算其等效輻亮度Lrei,Lrei與光譜匹配因子Q相乘得到目標遙感器等效輻亮度Ltai,最后根據目標遙感器定標區域響應灰度值DNtai,利用最小二乘法計算各通道定標系數ktai、ctai。交叉定標公式為:

基于譜段匹配的交叉定標關鍵是計算匹配因子,匹配因子表征不同地物、大氣條件、光譜參數差異引起探測器等效輻亮度的變化。在業務化交叉定標過程中,每次交叉定標時同步或準同步測量水體反射率特性和大氣條件能夠保證定標精度,但也使得應用受到限制,本文將對不同條件下匹配因子進行回歸分析獲得匹配因子變化規律,提高該交叉定標方法的工程適用性。
1.3 基于光譜重構的交叉定標
基于光譜重構的交叉定標是基于高光譜/超光譜參考遙感器探測器的交叉定標方法,要求參考遙感器連續光譜覆蓋目標遙感器譜段[8]。遙感器探測過程表示為:

式中 y、S(λ)和x(λ)分別表示等效輻亮度、歸一化光譜響應函數和入瞳光譜輻亮度。光譜重構是已知y和S(λ)條件下,考慮信號非負和噪聲有界先驗知識約束,采用規整化方法將反卷積問題轉變為最小化問題,即迭代搜索x(λ)使得[9]:

反卷積具體計算過程如下:
1)初始化

式中 spline_interp(·)表示三次樣條插值,x0(λ)為y0經過三次樣條插值后得到的光譜間隔為 1nm的光譜輻亮度,作為迭代計算的初始值。
2)迭代計算[10]
第k次迭代逼近過程為:

式中 yk和yk+1為第k次、k+1次迭代的等效光譜輻亮度; xk、xk+1為第k次、k+1次入瞳光譜輻亮度;(k()) r xλ 為松弛函數,用于抑制迭代過程對噪聲的放大:

3)迭代終止判據
當入瞳光譜輻亮度兩次差異小于規定閾值c,認為重構得到近似等于真實的入瞳光譜輻亮度,以下式表示:

經過插值后得到1nm光譜間隔的光譜輻亮度,作為連續光譜輻亮度,已知目標遙感器光譜響應函數的情況下,根據式(2)計算等效輻亮度,根據等效輻亮度和圖像灰度值計算絕對輻射定標系數。
由于光譜重構方法通過反卷積處理復原信號的高頻成分,復原過程不可避免放大高頻噪聲[11],盡管規整化反卷積利用物理約束對噪聲加以抑制,但探測器信噪比仍然是影響光譜重構精度的重要因素。
2 仿真實例
2.1 仿真方案
1)譜段匹配交叉定標:計算不同水體反射率、大氣條件下參考遙感器和目標遙感器的等效光譜輻亮度,對各譜段進行光譜匹配因子回歸分析,計算光譜匹配因子的回歸誤差;
2)光譜重構交叉定標:統計分析不同水體反射率、大氣條件下由復原光譜輻亮度與實際光譜輻亮度計算的目標遙感器等效輻亮度相對誤差。
交叉定標仿真方案如圖1所示。
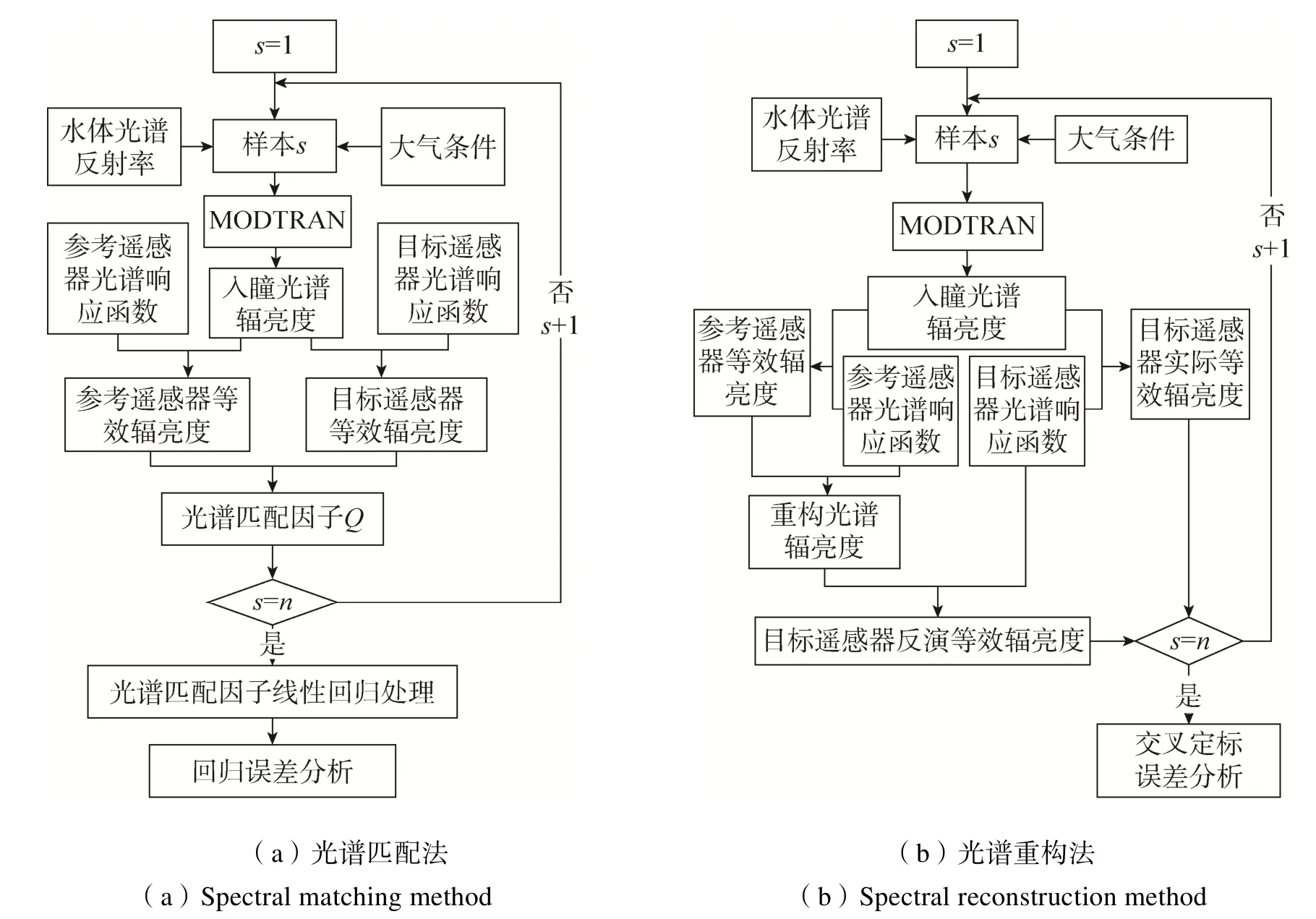
圖1 交叉定標仿真方案Fig.1 Simulation scheme of cross-calibration
2.2 仿真輸入
(1)水體反射率
圖2所示為從中選取的10條典型光譜反射率曲線。
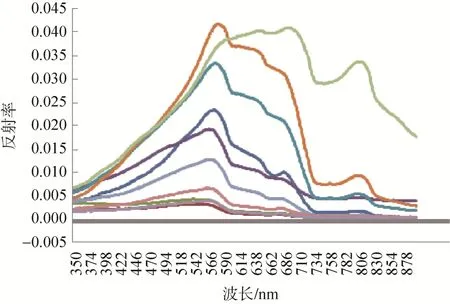
圖2 水體光譜反射率Fig.2 Curves of ocean spectral reflectivity
(2)仿真大氣條件
考慮季節、氣溶膠、光照條件等對大氣傳輸的影響,確定三種典型大氣條件,見表1所示。
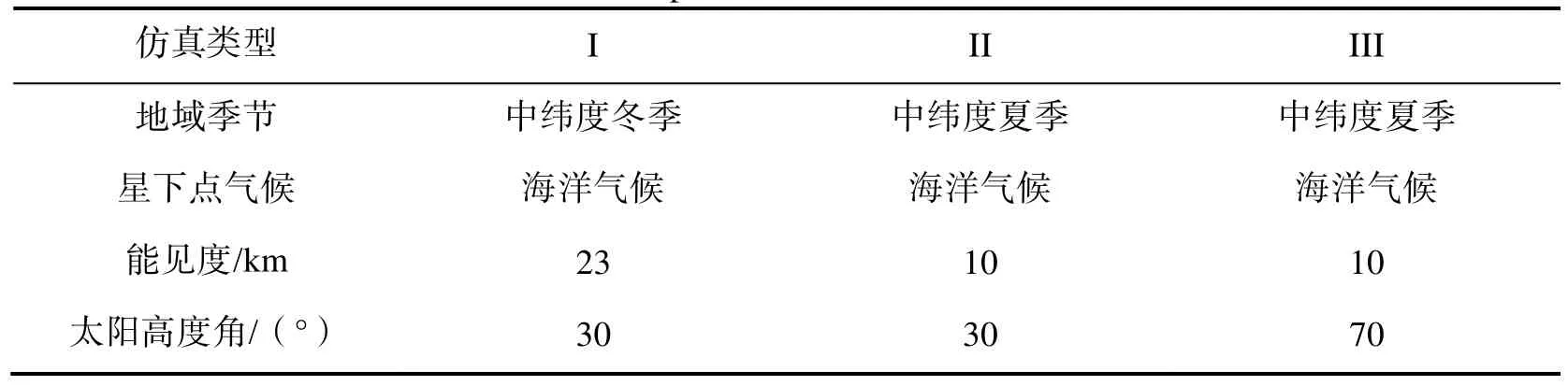
表1 仿真大氣條件Tab.1 Atmospheric condition for simulation
(3)譜段匹配法遙感器光譜參數
1)譜段范圍:以美國寬視場掃描儀 SEAWiFS、新型紅外成像輻射儀套件 VIIRS、歐盟新一代海洋水色遙感儀OLCI和韓國新一代海洋水色遙感器GOCI作為參考遙感器[12],以“海洋一號”系列衛星水色水溫掃描儀作為目標遙感器,詳細譜段設置見表2所示。
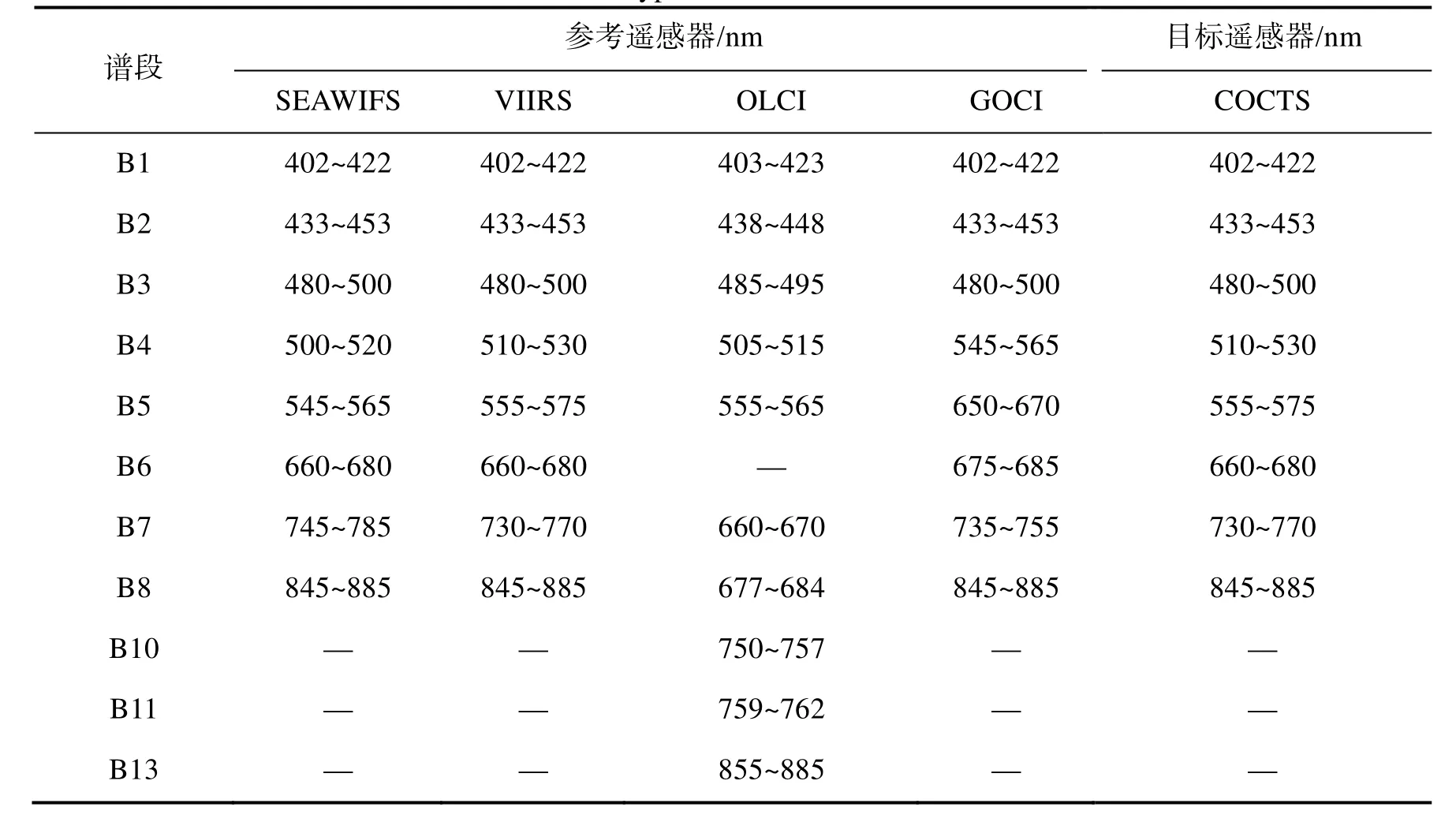
表2 典型水色遙感器波段設置Tab.2 Band of typical ocean color remote sensor
2)光譜響應函數:考慮光譜響應函數差異,參考遙感器和目標遙感器的光譜響應函數分別假設為高斯函數和矩形函數。
(4)光譜重構法遙感器光譜參數
參考遙感器光譜參數參照 Hyperion、NEMO、Enmap等超光譜成像儀設計指標[13],光譜分辨率5nm/10nm,信噪比指標均可以達到 100dB以上[14],參考遙感器和目標遙感器光譜響應函數分別假設為高斯函數和矩形函數[15]。
2.3 入瞳輻亮度
采用6S輻射傳輸模型,根據以上3種大氣條件進行入瞳光譜輻亮度仿真,結果如圖3所示。
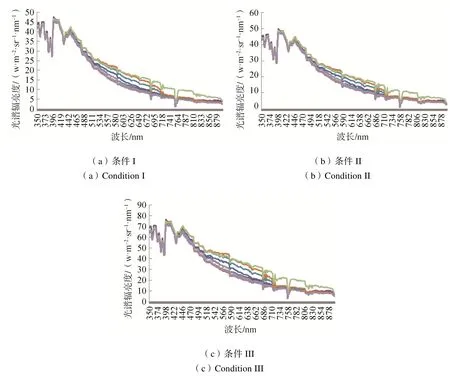
圖3 不同條件下的入瞳光譜輻亮度Fig.3 Apparent spectral radiance under different conditions
2.4 譜段匹配交叉定標誤差
綜合以上大氣條件和水表反射率變化條件下參考遙感器和目標遙感器等效輻亮度計算結果,仿真樣本S對應目標遙感器和參考遙感器各譜段等效光譜輻亮度Li, s和分別為:
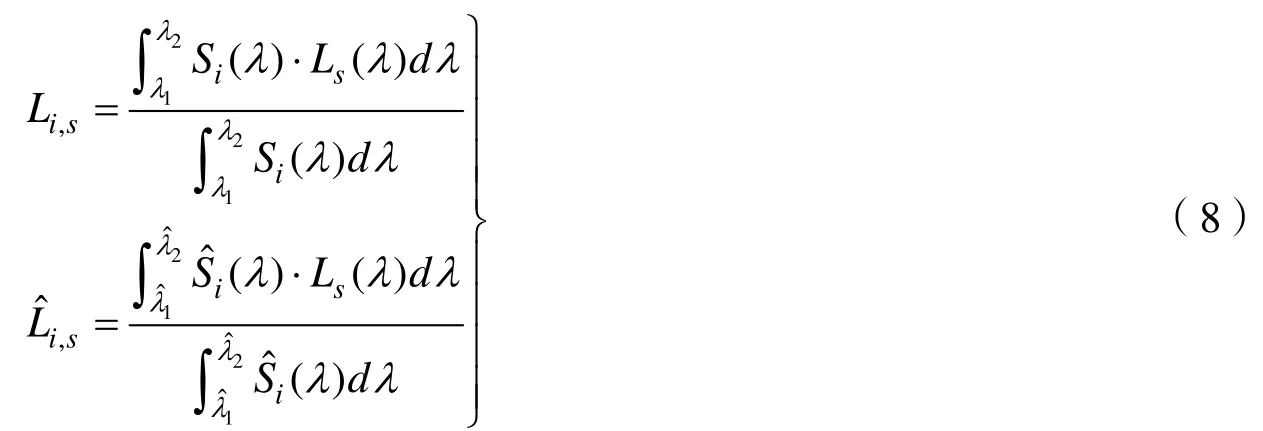
式中 Si(λ)和分別為目標遙感器和參考遙感器波段i的光譜響應函數;波段響應 Ls(λ)為入瞳光譜輻亮度。
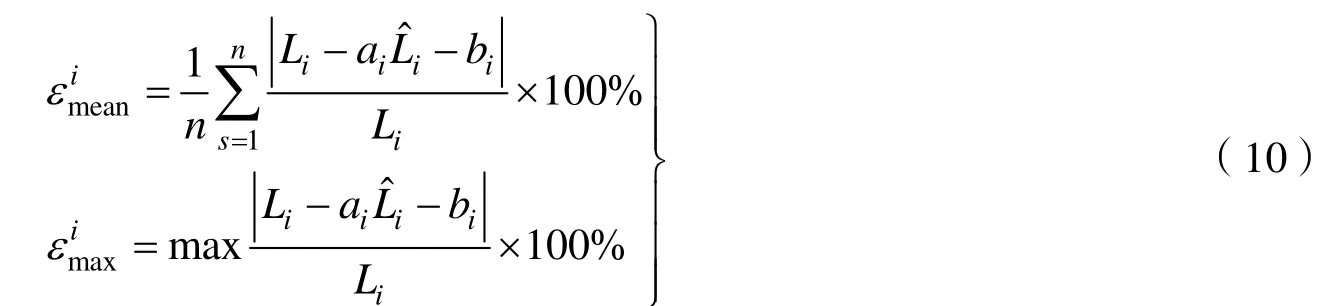
通過對Li, s和變化特性分析,構建各譜段等效光譜輻亮度序列線性回歸模型:

式中 ai、bi為線性回歸模型系數;Li、分別為目標遙感器和參考遙感器各譜段等效光譜輻亮度,使用最小二乘法求解,得到各譜段光譜匹配因子回歸誤差平均誤差和最大誤差:
光譜匹配因子回歸誤差統計結果見表3、表4。
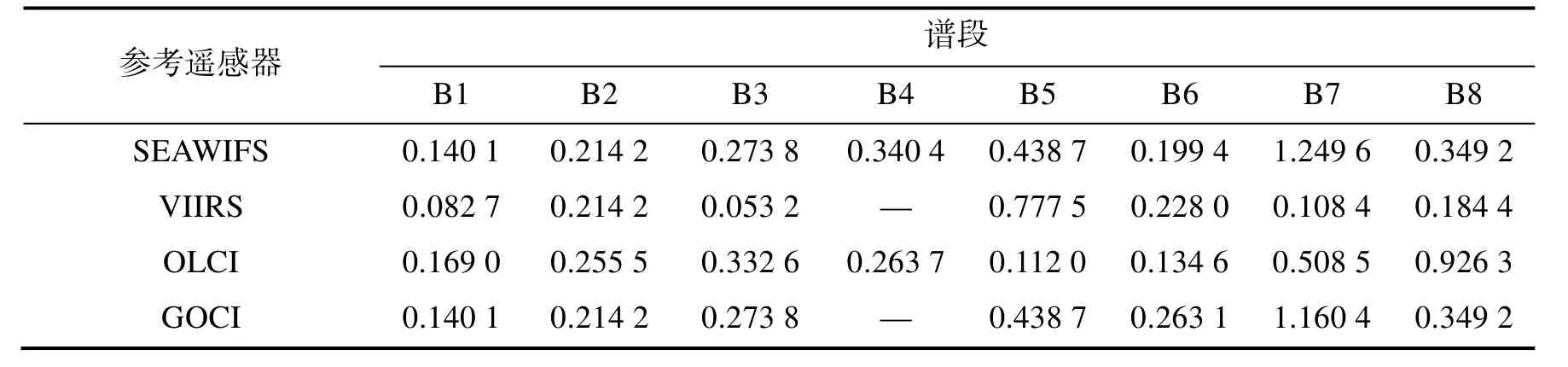
表3 回歸分析平均誤差Tab.3 Average error of regression 單位:%
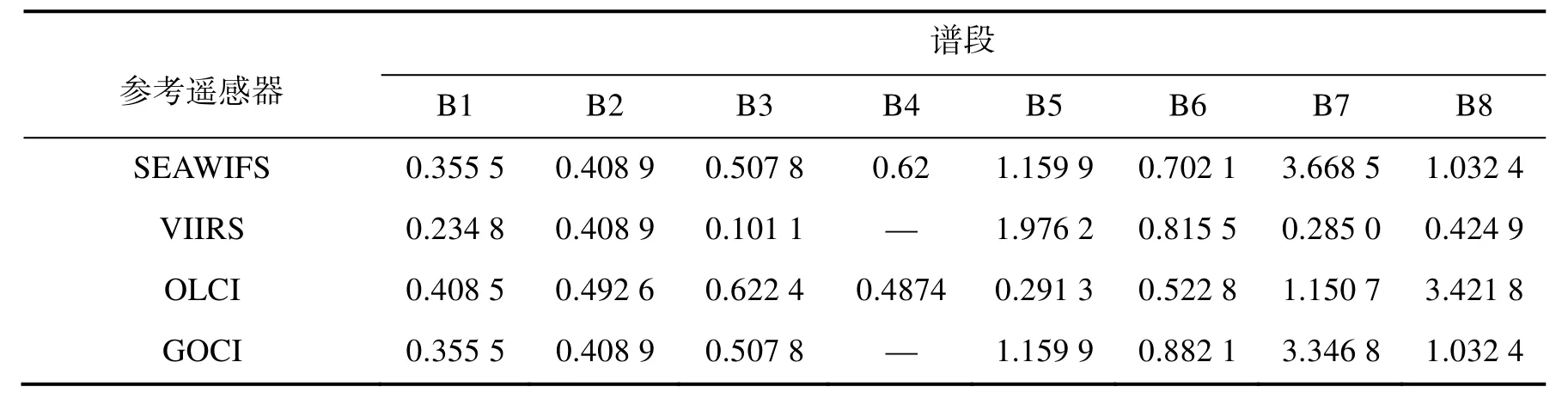
表4 回歸分析最大誤差Tab.4 Maximal error of regression 單位:%
譜段匹配法交叉定標仿真計算結果表明:
1)譜段匹配法光譜響應等因素引起的各譜段光譜匹配因子基本符合線性變化,驗證了光譜匹配因子回歸分析法在水體交叉定標應用中的可行性。
2)采用光譜匹配法交叉定標,定標誤差主要與光譜響應差異有關,光譜響應差異表現為譜段寬度、中心波長和函數類型差異,光譜響應差異越大,定標誤差越大。仿真結果表明,SEAWIFS的B7譜段中心波長相差15nm,交叉定標平均誤差和最大誤差分別大于1.24%和3.66%,GOCI的B7譜段中心波長相差5nm,譜段寬度相差20nm,交叉定標平均誤差和最大誤差分別大于1.16%和3.34%,OLCI 的B8譜段中心波長相差15nm,譜段寬度相差10nm,交叉定標平均誤差和最大誤差分別大于0.92%和3.42%,其他譜段定標平均誤差在0.05%~0.77%,最大誤差在0.1%~2%。
2.5 光譜重構法誤差
圖4所示為對于大氣條件I、不同水體光譜反射率下參考遙感器光譜分辨率5nm、10nm光譜重構結果。
根據式(8)得到目標遙感器和參考遙感器各譜段等效光譜輻亮度Li,s和,光譜重構法相對誤差和最大誤差:
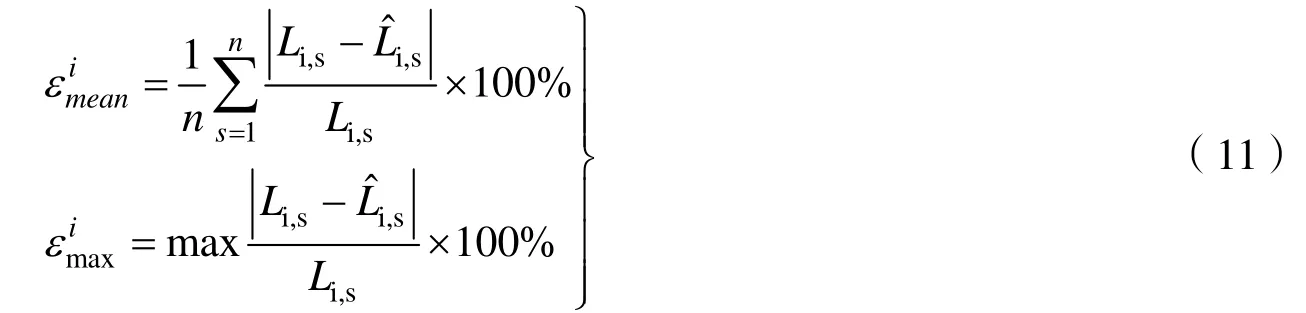
對不同大氣條件和水體反射率進行光譜重構法誤差分析,光譜重構法計算等效輻亮度平均誤差和最大誤差見表5~6。

圖4 光譜重構仿真Fig.4 Simulation of spectral reconstruction

表5 平均誤差Tab.5 Average error 單位:%

表6 最大誤差Tab.6 Maximal error 單位:%
為了分析信噪比的影響,對參考遙感器等效輻亮度疊加不同的高斯噪聲,并統計分析不同輸入條件下仿真結果,圖5所示為誤差隨信噪比變化情況。
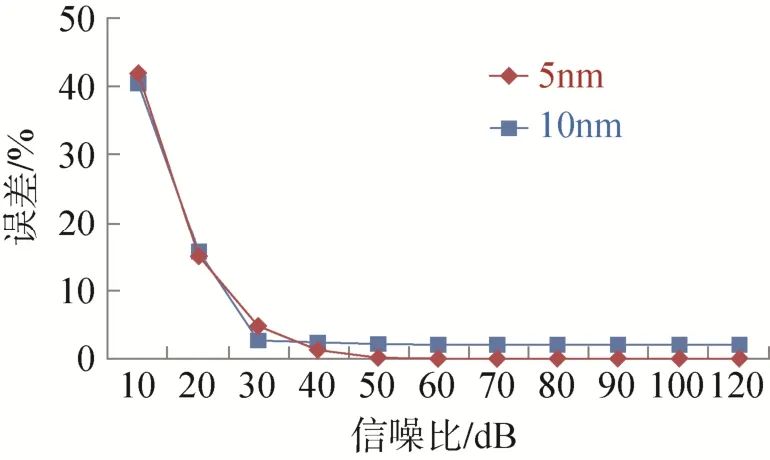
圖5 信噪比對定標誤差的影響Fig.5 SNR influence on calibration error
光譜重構法交叉定標仿真計算結果表明:
1)采用光譜重構法交叉定標,定標誤差主要與參考遙感器光譜分辨率有關,光譜分辨率越高,定標誤差越小。從仿真結果看,參考遙感器光譜分辨率為 5nm時,各譜段平均誤差小于0.03%,最大譜段誤差小于0.04%;參考遙感器光譜分辨率為10nm時,各譜段平均誤差小于1.4%,最大譜段誤差小于1.8%;
2)參考遙感器信噪比影響光譜重構法交叉定標誤差,定標誤差隨信噪比降低呈指數下降。從仿真結果看,當信噪比優于80dB時,5nm和10nm光譜分辨率下噪聲對光譜重構精度影響可以忽略。
3 結束語
本文從海洋水色遙感器譜段匹配和光譜重構兩種交叉定標方法原理出發,基于實測水體光譜反射率,綜合考慮水體反射特性、大氣條件及光譜響應變化,定量仿真分析了交叉定標誤差,通過結果比較和分析得到以下結論:
1)參考遙感器光譜分辨率達到 5nm時,水色遙感各譜段光譜重構法定標精度優于譜段匹配法;當參考遙感器光譜分辨率為10nm時,兩種方法的交叉定標誤差相當;
2)在水色遙感器交叉定標中,光譜重構法比譜段匹配法在各譜段誤差更為穩定;
3)在遙感器光譜通道差異較大的情況下,光譜重構法更能保證交叉定標精度。
該結論可以為即將發射的海洋1C/1D星及后續海洋衛星水色遙感器星上定標方案決策提供參考。
References)
[1]FROUIN R. In-flight Calibration of Satellite Ocean-colour Sensors[R]. IOCCG Report Number 14, 2013: 1-4.
[2]蔣興偉, 牛生麗, 唐軍武, 等. SeaWiFS與HY-1衛星COCTS的系統交叉輻射校正[J]. 遙感學報, 2005, 9(6): 680-687. JIANG Xingwei, NIU Shengli, KANG Wujun, et al. The System Cross-calibration between SeaWIFS and HY-1 COCTS[J]. Journal of Remote Sensing, 2005, 9(6): 680-687.(in Chinese)
[3]潘德爐, 何賢強, 朱乾坤. HY-1A衛星遙感器水色水溫掃描儀在軌交叉定標[J]. 科學通報, 2004, 49(21): 2239-2244 PAN Delu, HE Xianqiang, ZHU Qiankun. On-orbit Cross Calibration of HY-1A COCTS[J]. Chinese Science Bulletn, 2004, 49(21): 2239-2244.(in Chinese)
[4] 唐軍武, 顧行發, 牛生麗, 等. 基于水體目標的CBERS-02衛星CCD相機與MODIS的交叉輻射定標[J]. 中國科學E輯, 2005: 35(增刊 I): 59-69 TANG Junwu, GU Xingfa, NIU Shengli, et al. Radiometric Cross-calibration of the CBERS-02/CCD and EOS/MODIS Based on Water Body[J]. Science in China(Series E), 2005: 35(Suppl I): 59-69.(in Chinese)
[5]周冠華, 姜禾, 趙慧潔, 等. 基于精確光譜響應匹配的星載成像光譜儀交叉輻射定標[J]. 光譜學與光譜分析, 2012, 32(12): 3416-3421. ZHOU Guanhua, JIANG He, ZHAO Huijie, et al. Imaging Spectrometry Radiometric Cross-calibration Based on Precise Spectral Response Matching[J]. Spectroscopy and Spectral Analysis, 2012, 32(12): 3416-3421.(in Chinese)
[6]TEILLET P M, FEDOSEJEVS G, THOME K J, et al. Impacts of Spectral Band Difference Effects on Radiometric Cross-calibration Between Satellite Sensors in the Solar-reflective Spectral Domain[J]. Remote Sensing of Environment, 2007, 110: 393-409.
[7]童進軍, 邱康睦, 李小文, 等. 利用EOS/MODIS交叉定標FY1D/VIRR可見光-近紅外通道[J]. 遙感學報, 2005, 9(4): 349-355. TONG Jinjun, QIU Kangmu, LI Xiaowen, et al. Radiometric Cross-calibration of the FY1D/VIRR and EOS/MODIS in the Visible and Near-infrared Spectral Bands[J]. Journal of Remote Sensing, 2005, 9(4): 349-355.(in Chinese)
[8]徐娜, 胡秀清, 陳林, 等. FY-2靜止衛星紅外通道的高光譜交叉定標[J]. 遙感學報, 2012, 16(6): 645-952. XU Na, HU Xiuqing, CHEN Lin, et al. Inter-calibration of Infrared Channels of FY-2/VISSR Using High-spectral Resolution Sensors IASI and AIRS[J]. Journal of Remote Sensing, 2012, 16(6): 645-952.(in Chinese)
[9]ZHAO Huijie, JIA Guorui, LI Na. Transformation from Hyperspectral Radiance Data to Data of Other Sensors Based on Spectral Superresolution[J]. IEEE Transaction on Geoscience and remote sensing, 2010, 48(11): 3903-3911.
[10]MORAWSKI R Z, SZCZECINSKI, BARWICZ A. Deconvolution Algorithms for Instrumental Applications: A Comparative Study[J]. Journal of Chemometrics, 1995, 9(1): 3-20.
[11]CRILLY P B. A Quantitative Evaluation of Various Iterative Deconvolution Algorithms[J]. IEEE Transaction on Instrumentation and Measurement, 1991, 40(3): 558-562.
[12]劉良明, 祝家東. 海洋水色遙感器發展趨勢初探[J]. 遙感信息, 2011(2): 111-119. LIU Liangming, ZHU Jiadong. Preliminary Study on Trend of Ocean Color Sensor Development[J]. Remote SensingInformation. 2011(2): 111-119.(in Chinese)
[13]SANG B, SCHUBERT J, KAISER S. The EnMAP Hyperspectral Imaging Spectrometer: Instrument Concept, Calibration and Technologies[J]. Proc of SPIE, 2008, (7086): 708605-1-708605-15.
[14]李歡, 周峰. 星載超光譜成像技術發展與展望[J]. 光學與光電技術, 2012, 10(5): 38-43. LI Huan, ZHOU Feng. Development of Spaceborne Hyperspectral Imaging Technique[J]. Optics & Optoelectronic Technology, 2012, 10(5): 38-43.(in Chinese)
[15]李忠平, 崔廷偉, 孫凌. 海洋生物地球化學性質的水色遙感反演與應用: 方法和挑戰[J]. 激光生物學報, 2014, 23(6): 481-501. LI Zhongping, CUI Tingwei, SUN Ling. Derivation and Application of Biogeochemical Properties from the Measurement of Water Color: Methods and Challenges[J]. Acta Laser Biology Sinica, 2014, 23(6): 481-501.(in Chinese)
[16]韓啟金, 劉李, 張學文, 等. 利用GF-1對ZY-102C衛星PMS相機進行交叉檢校[J]. 航天返回與遙感, 2015, 36(1): 73-80. HAN Qijin, LIU Li, ZHANG Xuewen, et al. Cross-validation and Calibration of ZY-1 02C PMS Sensor Using GF-1 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(1): 73-80.(in Chinese)
[17]韓啟金, 閔祥軍, 傅俏燕.“環境一號”B星熱紅外通道星上定標與交叉定標研究[J]. 航天返回與遙感, 2009, 30(4): 42-48. HAN Qijin, MIN Xiangjun, FU Qiaoyan. Research of Onboard Calibration and Cross-calibration for Thermal Infrared Channel of HJ-1B[J]. Spacecraft Recovery & Remote Sensing, 2009, 30(4): 42-48.(in Chinese)
[18]劉李, 傅俏燕, 史婷婷, 等. MODIS的HJ-1B紅外通道星上定標系數交叉驗證[J]. 紅外與激光工程, 2014, 43(11): 3638-3645. LIU Li, FU Qiaoyan, SHI Tingting, et al. Cross-validation of HJ-1B Infrared Channels Onboard Calibration Coefficients Using MODIS[J]. Infrared and Laser Engineering, 2014, 43(11): 3638-3645.(in Chinese)
[19]邢前國, 婁明靜, 張九星, 等. 高光譜紅外譜段交叉定標與近海遙感應用試驗[J]. 遙感學報, 2014, 18(z1): 68-73. XING Qianguo, LOU Mingjing, ZHANG Jiuxing, et al. Radiometric Cross-calibration of Tiangong-1 and MODIS Infrared Bands and Applications in Monitoring Coastal Sea Surface Temperature[J]. Journal of Remote Sensing, 2014, 18(z1): 68-73.(in Chinese)
[20]徐文斌, 鄭小兵, 易維寧, 等. 高光譜成像儀交叉定標技術研究與應用[J]. 大氣與環境光學學報, 2014, 9(1): 61-71. XU Wenbin, ZHENG Xiaobing, YI Weining, et al. Research and Application of Cross-calibration Technology Based on Hyperspectral Imager[J]. Journal of Atmospheric and Environmental Optics, 2014, 9(1): 61-71.(in Chinese)
[21]漆成莉, 胡秀清, 張里陽, 等. 基于高光譜資料對FY-1C/1D氣象衛星進行交叉定標[J]. 氣象學報, 2012, 70(4): 892-901. QI Chengli, HU Xiuqing, ZHANG Liyang, et al. Cross-calibration of FY-1C/1D Satellite Based on Hyper-spectral Data[J]. Acta Meteorologica Sinica, 2012, 70(4): 892-901.(in Chinese)
Analysis and Simulation of Cross Calibration Precision of Ocean Color Remote Sensing
GAO Huiting MA Yue LIU Wei HE Hongyan
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Cross calibration is an important method for solving the high-frequency operational on-orbit calibration of ocean color remote sensor. In order to analyses the influence of two different kinds of cross calibration method on calibration precision, spectral matching and spectral reconstruction method and their influence factors are introduced. Aiming at cross calibration for COCTS of “HY-1” series satellites, and based on existing reference sensor and measured reflectance of ocean, cross calibration uncertainty of the two methods in difference ocean、atmosphere and spectral response conditions are compared. Results show that precision of spectral reconstruction method is better than that of spectral matching method as a whole, and when spectral resolution of reference sensor is 5nm, error introduced by spectral reconstruction model is less than 0.05%, providing a reference for selection of cross calibration method.
ocean color remote sensing; cross calibration; spectral matching; spectral reconstruction; space remote sensing
TP714
: A
: 1009-8518(2016)02-0116-10
10.3969/j.issn.1009-8518.2016.02.015
高慧婷,女,1981年生,2007年獲北京信息科技大學碩士學位,工程師。研究方向為星載光學遙感器輻射定標技術。E-mail: gaohuiting_1100@126.com。
(編輯:毛建杰)
2015-10-20
國家重大科技專項工程