基于PLC的模糊PID控制器在熱風(fēng)干燥箱上的應(yīng)用
2016-02-18 07:06:55磐洪苑乾黃漢英胡月來(lái)聶少伍趙思明
食品與機(jī)械 2016年12期
王 磐洪苑乾 黃漢英 胡月來(lái) 聶少伍 趙思明
(1. 華中農(nóng)業(yè)大學(xué)工學(xué)院,湖北 武漢 430070;2. 華中農(nóng)業(yè)大學(xué)食品科技學(xué)院,湖北 武漢 430070)
基于PLC的模糊PID控制器在熱風(fēng)干燥箱上的應(yīng)用
王 磐1洪苑乾1黃漢英1胡月來(lái)1聶少伍1趙思明2
(1. 華中農(nóng)業(yè)大學(xué)工學(xué)院,湖北 武漢 430070;2. 華中農(nóng)業(yè)大學(xué)食品科技學(xué)院,湖北 武漢 430070)
針對(duì)熱風(fēng)干燥過(guò)程中溫、濕度變化的非線性和大滯后現(xiàn)象,系統(tǒng)采用了模糊控制與常規(guī)PID控制相結(jié)合的方法,利用模糊PID控制原理,設(shè)計(jì)了模糊PID控制器,實(shí)現(xiàn)了PID參數(shù)在PID控制系統(tǒng)中的在線自整定。試驗(yàn)結(jié)果表明:在目標(biāo)溫度設(shè)定為15 ℃時(shí),與常規(guī)PID控制相比,基于模糊PID控制的熱風(fēng)干燥控制系統(tǒng)最大超調(diào)量下降了3 ℃,調(diào)節(jié)時(shí)間減少了10 min,穩(wěn)態(tài)誤差為±0.5 ℃,具有更好的動(dòng)態(tài)和靜態(tài)響應(yīng)特性,在參數(shù)改變的情況下更能適應(yīng)熱風(fēng)干燥箱的工程應(yīng)用需求。
模糊PID;PLC;熱風(fēng)干燥;MATLAB;參數(shù)自整定
熱風(fēng)干燥技術(shù)是將具有一定溫、濕度的熱空氣通過(guò)待干燥物料的表面以去除物料中水分的方法,目前廣泛應(yīng)用于農(nóng)產(chǎn)品加工工程中。常壓熱風(fēng)干燥技術(shù)在中國(guó)目前的農(nóng)產(chǎn)品加工產(chǎn)業(yè)中應(yīng)用達(dá)到90%以上[1-2]。
溫、濕度是物料干燥過(guò)程中非常重要的兩個(gè)參數(shù),直接影響干燥物料品質(zhì)[3-5],因此將溫、濕度控制在一個(gè)合理的范圍內(nèi)對(duì)物料干燥是非常重要的。目前常用的PID控制雖然結(jié)構(gòu)簡(jiǎn)單,但控制超調(diào)量大,調(diào)節(jié)能力較弱,且依賴于被控對(duì)象的數(shù)學(xué)模型。而溫度和濕度在熱風(fēng)干燥過(guò)程中屬于非線性、大滯后的控制對(duì)象,要得到精確的數(shù)學(xué)模型比較困難,PID控制方法滿足不了控制精度的要求[6-8]。針對(duì)上述問(wèn)題,本試驗(yàn)擬采用模糊控制與常規(guī)PID控制相結(jié)合的方法,設(shè)計(jì)模糊PID控制器,以偏差值e和偏差的變化ec作為輸入,PID參數(shù)Kp、Ki、Kd作為輸出,利用模糊控制規(guī)則在線對(duì)PID參數(shù)進(jìn)行修改,以改善熱風(fēng)干燥箱的控制精度。
1 系統(tǒng)硬件組成
熱風(fēng)干燥箱控制系統(tǒng)以PLC為核心控制器,PC機(jī)作為人機(jī)界面,主要由加熱器、加濕器、制冷系統(tǒng)、轉(zhuǎn)輪除濕系統(tǒng)、循環(huán)風(fēng)機(jī)、溫濕度傳感器等組成。
溫度控制主要是通過(guò)加熱器和制冷系統(tǒng)來(lái)調(diào)節(jié),濕度控制主要通過(guò)加濕器、制冷系統(tǒng)的蒸發(fā)器表冷除濕和轉(zhuǎn)輪吸附除濕來(lái)實(shí)現(xiàn),通過(guò)循環(huán)風(fēng)機(jī)對(duì)干燥箱進(jìn)行循環(huán)送風(fēng),并利用變頻器對(duì)循環(huán)風(fēng)機(jī)進(jìn)行調(diào)速,采用PC機(jī)作為控制系統(tǒng)的上位機(jī),采用PC/PPI協(xié)議與PLC進(jìn)行通訊,實(shí)現(xiàn)對(duì)系統(tǒng)的監(jiān)控[9]。控制系統(tǒng)的硬件結(jié)構(gòu)見圖1。
2 模糊PID控制器
2.1 模糊PID控制系統(tǒng)結(jié)構(gòu)
模糊PID控制器的結(jié)構(gòu)主要包括模糊控制和參數(shù)可調(diào)整的PID控制兩部分。模糊PID控制系統(tǒng)結(jié)構(gòu)見圖2。
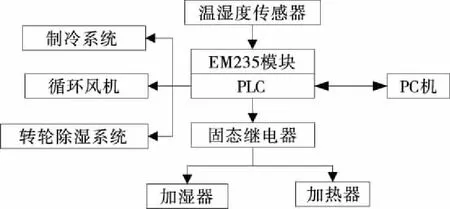
圖1 控制系統(tǒng)硬件結(jié)構(gòu)圖
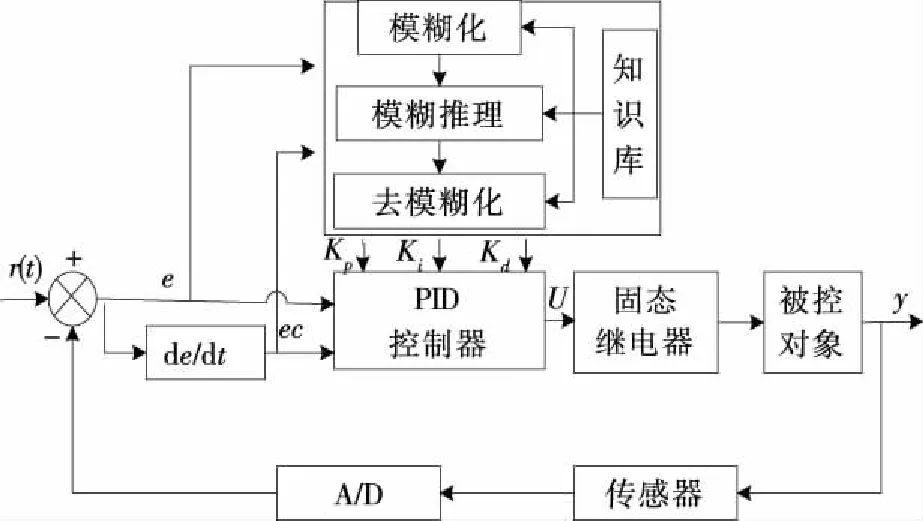
U. 第k次輸出的控制量e. 第k次采樣時(shí)的采樣偏差值ec. 第k次偏差的變化Kp. 調(diào)節(jié)器的比例積分Kd. 調(diào)節(jié)器的微分系數(shù)Ki. 調(diào)節(jié)器的積分系數(shù)
圖2 模糊PID控制系統(tǒng)結(jié)構(gòu)圖
Figure 2 Fuzzy PID control system structure
設(shè)溫度(或濕度)的給定值為r(t),溫濕度傳感器檢測(cè)到的值為y,模糊PID控制器的輸入變化量設(shè)置為y與r(t)的偏差值e以及偏差的變化ec,輸出變化量設(shè)置為PID的3個(gè)可調(diào)整參數(shù)Kp、Ki、Kd。
2.2 模糊PID控制器的設(shè)計(jì)
在控制系統(tǒng)中,將箱內(nèi)的溫、濕度設(shè)定值作為控制零界點(diǎn)。模糊控制器的輸入變化量為y與r(t)之間的偏差值和偏差的變化,模糊輸出變化量為Kp、Ki、Kd的修正值△Kp、△Ki、△Kd,建立模糊PID控制器。現(xiàn)在以溫度為例來(lái)說(shuō)明模糊PID控制器的設(shè)計(jì)。
2.2.1 溫度模糊PID控制器各參數(shù)的確定 選定溫度偏差值e和溫度偏差的變化ec作為模糊控制器的輸入變化量,選定PID控制器的參數(shù)Kp、Ki、Kd的修正值△Kp、△Ki、△Kd作為模糊控制器的輸出變化量。
選取溫度偏差值e的基本論域?yàn)閇-6 6],溫度偏差的變化ec的基本論域?yàn)閇-3 3];選取語(yǔ)言變量偏差E的模糊論域?yàn)閇-3 3],偏差的變化EC的模糊論域?yàn)閇-3 3];模糊子集為{NB NM NS Z PS PM PB},模糊意義簡(jiǎn)記為{負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大};設(shè)定語(yǔ)言輸入變量Kp、Ki、Kd的基本論域分別為[-0.3 0.3]、[-0.06 0.06]、[-3 3],模糊論域分別為[-0.3 0.3]、[-0.06 0.06]、[-3 3],模糊集為{NB NM NS Z PS PM PB},意義同上。
模糊控制器的相關(guān)參數(shù)見表1。
2.2.2 隸屬度函數(shù)(MF)的確定 在模糊控制器的建立過(guò)程中,通過(guò)隸屬度函數(shù)可以方便的獲取各模糊語(yǔ)言變量的賦值表。為了方便計(jì)算,故選取三角形隸屬度函數(shù)曲線[10-12]。
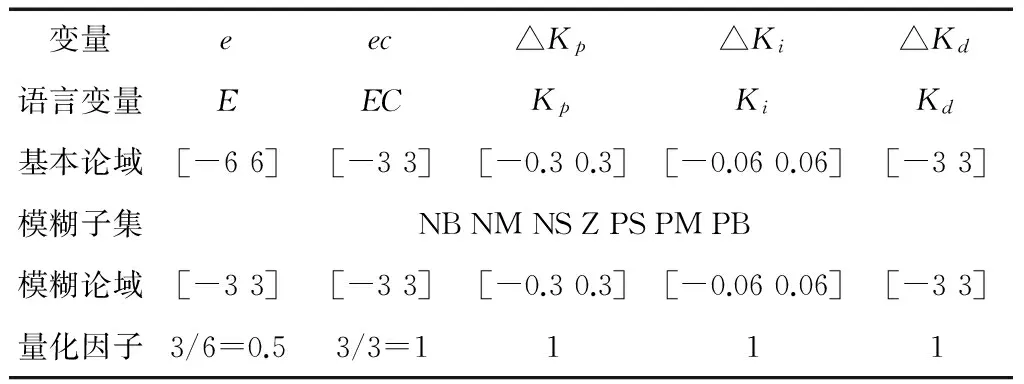
表1 模糊控制器的相關(guān)參數(shù)
由于系統(tǒng)中選取的溫度輸入、溫度輸出的語(yǔ)言變量都是7個(gè)語(yǔ)言值,即NB NM NS Z PS PM PB,對(duì)于輸入變量偏差e選取的7個(gè)語(yǔ)言值為NB(溫差負(fù)大)、NM(溫差負(fù)中)、NS(溫差負(fù)小)、Z(溫差適中)、PS(溫差正小)、PM(溫差正中)、PB(溫差正大);溫度偏差的變化的7個(gè)語(yǔ)言值為NB(負(fù)溫差變化嚴(yán)重)、NM(負(fù)溫差變化中等)、NS(負(fù)溫差變化不嚴(yán)重)、Z(溫差沒(méi)變化)、PS(正溫差變化小)、PM(正溫差變化中等)、PB(正溫差變化嚴(yán)重);輸出變量Kp、Ki、Kd選取的7個(gè)語(yǔ)言值分別為NB(負(fù)大)、NM(負(fù)中)、NS(負(fù)小)、Z(零)、PS(正小)、PM(正中)、PB(正大)。根據(jù)現(xiàn)有的PID參數(shù)的整定經(jīng)驗(yàn),確定輸入、輸出變量在論域上的隸屬度函數(shù)見圖3。
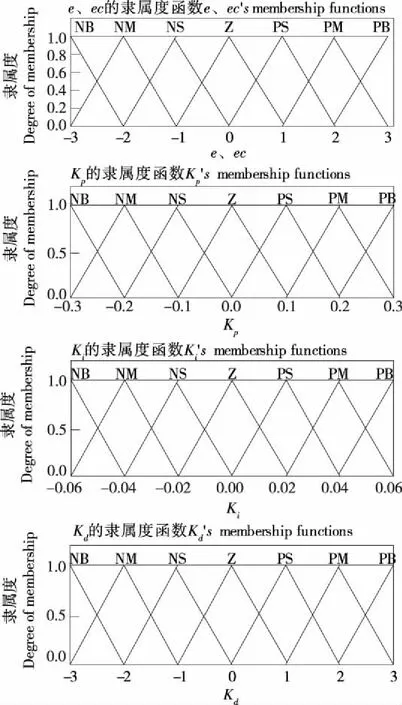
圖3 輸入輸出變量的隸屬度函數(shù)
2.2.3 建立模糊規(guī)則表 模糊規(guī)則是輸入量和輸出量之間模糊蘊(yùn)涵關(guān)系的表現(xiàn),是用F條件命題對(duì)這種關(guān)系進(jìn)行了表述。基于系統(tǒng)的穩(wěn)態(tài)性能、響應(yīng)速度、超調(diào)量和穩(wěn)定精度等因素考慮,PID參數(shù)的調(diào)整經(jīng)驗(yàn)規(guī)則[13-15]:
(1) 當(dāng)|e|較大時(shí),可選擇取較大Kp,這樣可以加快系統(tǒng)的響應(yīng)速度,并減小系統(tǒng)的時(shí)間常數(shù)和阻尼系數(shù)。但Kp過(guò)大時(shí)則會(huì)導(dǎo)致系統(tǒng)的不穩(wěn)定。為避免出現(xiàn)積分過(guò)飽和現(xiàn)象,可選取較小的Kd。此時(shí),可取Ki=0以避免系統(tǒng)的超調(diào)量較大。
(2) 當(dāng)|e|處于中等大時(shí),可取較小的Kp以保證系統(tǒng)響應(yīng)的超調(diào)量較小。此時(shí),為確保系統(tǒng)的響應(yīng)速度較快,可取適中的Kd值。同時(shí),可將Ki適當(dāng)增大。
(3) 當(dāng)|e|較小時(shí),可選取較大的Kp和Ki以改善系統(tǒng)的穩(wěn)態(tài)性能,同時(shí)為了避免系統(tǒng)在平衡點(diǎn)時(shí)出現(xiàn)震蕩,Kd的取值應(yīng)適中。
模糊規(guī)則的制定是一個(gè)非常復(fù)雜的過(guò)程,一般是依據(jù)上述經(jīng)驗(yàn)原則和操作者的實(shí)際經(jīng)驗(yàn)來(lái)進(jìn)行總結(jié)的。本系統(tǒng)采用的是“IF ……THEN……”的結(jié)構(gòu)模式,根據(jù)實(shí)際的專家經(jīng)驗(yàn)和試驗(yàn)過(guò)程中的經(jīng)驗(yàn)總結(jié)得到49條模糊控制規(guī)則,并利用計(jì)算機(jī)仿真技術(shù)對(duì)這些規(guī)則進(jìn)行了優(yōu)化,結(jié)果見表2。
根據(jù)模糊控制規(guī)則的要求,利用MATLAB軟件對(duì)相應(yīng)的參數(shù)進(jìn)行計(jì)算,得出模糊PID控制規(guī)則查詢表見表3。
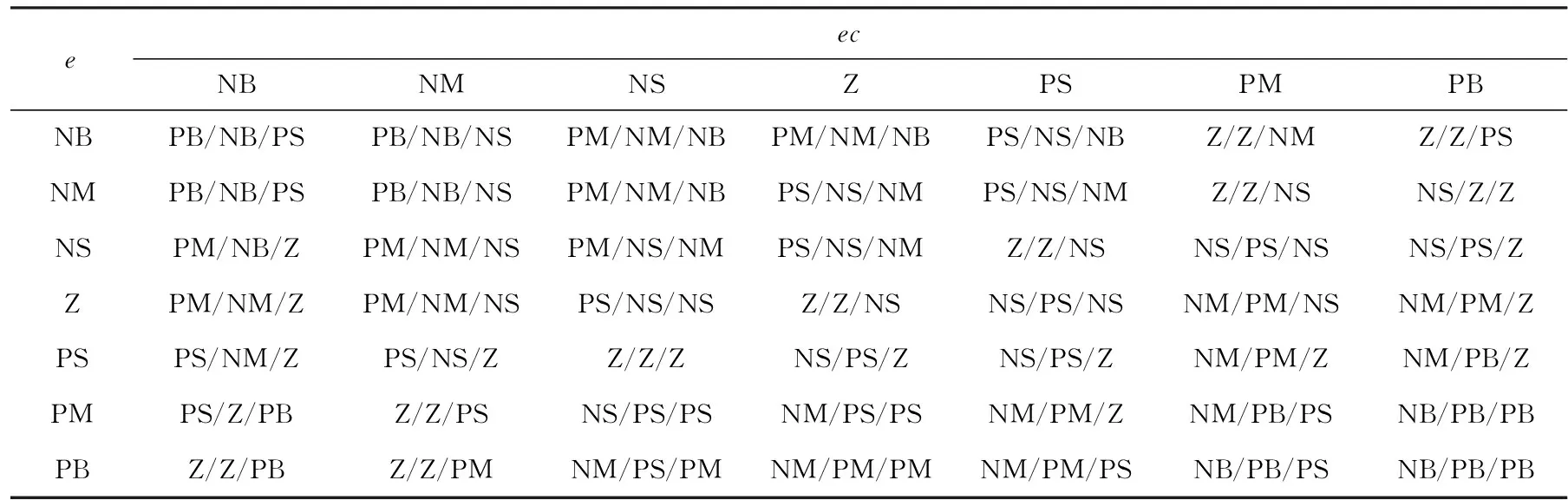
表2 溫度輸出變量 Kp、Ki、 Kd的控制規(guī)則表
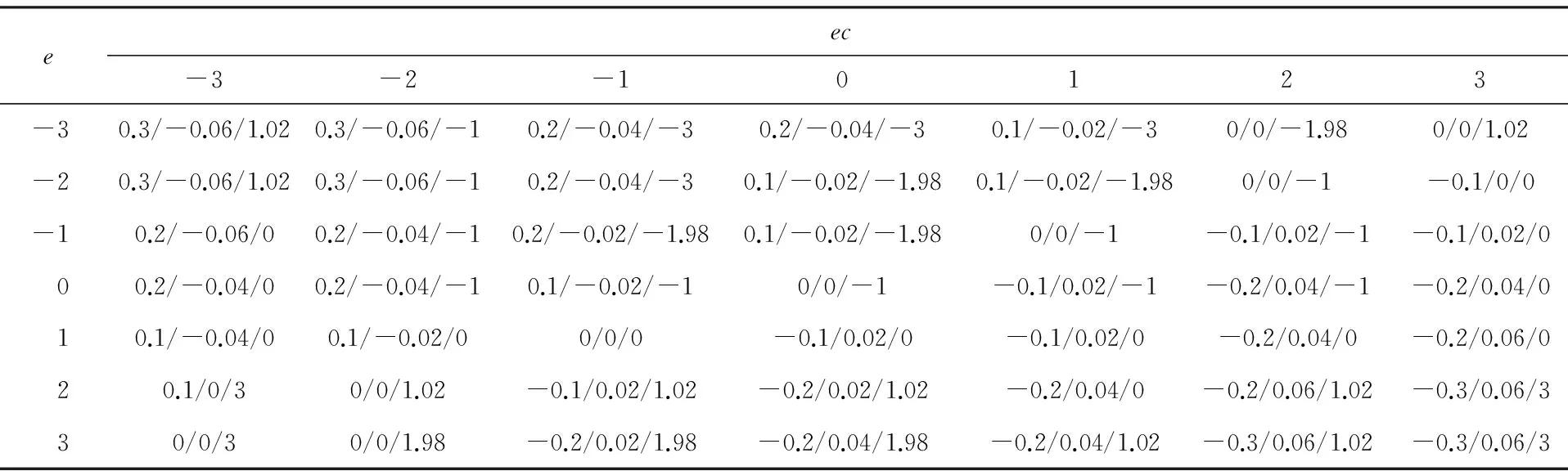
表3 模糊PID控制規(guī)則查詢表
2.3 系統(tǒng)仿真試驗(yàn)
為了滿足在工程上的使用要求,利用計(jì)算技術(shù)在MATLAB軟件上對(duì)模糊PID控制器進(jìn)行仿真,得出Kp、Ki、Kd在論域上的輸出波形見圖4~6。由圖4~6可知,當(dāng)溫度偏差為-3,溫度偏差的變化為3時(shí),輸出變量Kp為0,Ki為0,Kd為1.02,與表3結(jié)果一致。
3 控制系統(tǒng)軟件設(shè)計(jì)
控制系統(tǒng)軟件的設(shè)計(jì)主要包括PLC控制程序的設(shè)計(jì)、PC機(jī)監(jiān)控程序的設(shè)計(jì)。
3.1 模糊PID控制程序設(shè)計(jì)
采用STEP-7軟件對(duì)模糊PID控制器的控制程序進(jìn)行設(shè)計(jì),程序主要分為輸入量量化程序、模糊控制查表程序、去模糊化程序等,流程圖見圖7。
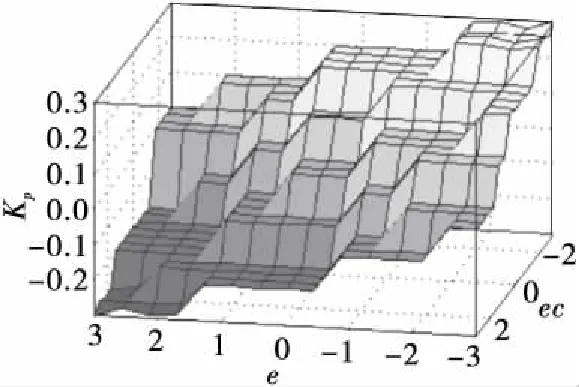
圖4 Kp在論域上的輸出波形圖
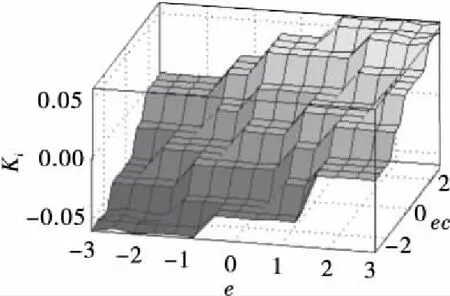
圖5 Ki在論域上的輸出波形圖
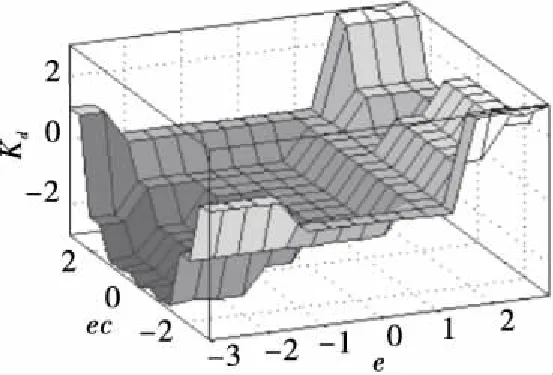
圖6 Kd在論域上的輸出波形圖
首先,對(duì)系統(tǒng)進(jìn)行初始化設(shè)置,并利用HX-42I1WS型溫濕度傳感器對(duì)熱風(fēng)干燥箱內(nèi)部的溫度和濕度進(jìn)行檢測(cè),輸送到EM235模塊,由PLC接收EM235模塊送來(lái)的溫、濕度信號(hào),并與設(shè)定值進(jìn)行比較得到偏差信號(hào),調(diào)用模糊PID控制算法,通過(guò)輸出占空比可調(diào)的PWM脈沖信號(hào)對(duì)固態(tài)繼電器的通斷時(shí)間進(jìn)行控制,來(lái)完成系統(tǒng)對(duì)溫、濕度的準(zhǔn)確控制。
3.2 監(jiān)控程序設(shè)計(jì)
PC機(jī)監(jiān)控程序主要是實(shí)現(xiàn)對(duì)系統(tǒng)數(shù)據(jù)的采集、存儲(chǔ)、顯示和設(shè)置等功能,系統(tǒng)采用WinCC7.0實(shí)現(xiàn)監(jiān)控工程的組態(tài)。監(jiān)控系統(tǒng)主要包括6個(gè)界面:用戶登錄、工藝流程、參數(shù)設(shè)置、數(shù)據(jù)采集、趨勢(shì)顯示和故障警報(bào)界面。
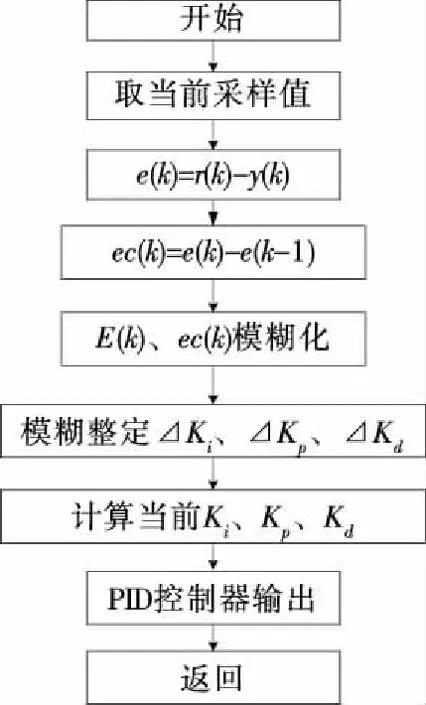
圖7 模糊PID控制流程圖
4 運(yùn)行試驗(yàn)
4.1 試驗(yàn)材料
鮮活團(tuán)頭魴(武昌魚):尾重0.5 kg左右,購(gòu)于華中農(nóng)業(yè)大學(xué)農(nóng)貿(mào)市場(chǎng)。
4.2 試驗(yàn)設(shè)備
循環(huán)熱風(fēng)干燥箱:QYH-1500A型,東莞市常平企亞工業(yè)設(shè)備制造廠。經(jīng)本課題組改造后,計(jì)算機(jī)控制系統(tǒng)可對(duì)溫度、濕度、風(fēng)速進(jìn)行實(shí)時(shí)的檢測(cè)或控制,熱風(fēng)干燥箱整機(jī)結(jié)構(gòu)示意圖見圖8。
4.3 試驗(yàn)方法
4.3.1 樣品處理
鮮活團(tuán)頭魴→去鱗、剖背去除內(nèi)臟→清洗并進(jìn)行10%鹽水腌制→瀝干→懸掛待用
4.3.2 干燥方法 在環(huán)境溫度為5~15 ℃的條件下,將干燥溫度設(shè)置為15 ℃,干燥濕度設(shè)置為41%,干燥風(fēng)速設(shè)置為2 m/s。以平行于風(fēng)向的方式將瀝干的團(tuán)頭魴懸掛在熱風(fēng)干燥箱的干燥室內(nèi)進(jìn)行干燥,每條間距約5 cm,以保證團(tuán)頭魴的各個(gè)表面與熱風(fēng)充分接觸,時(shí)間約53 h。
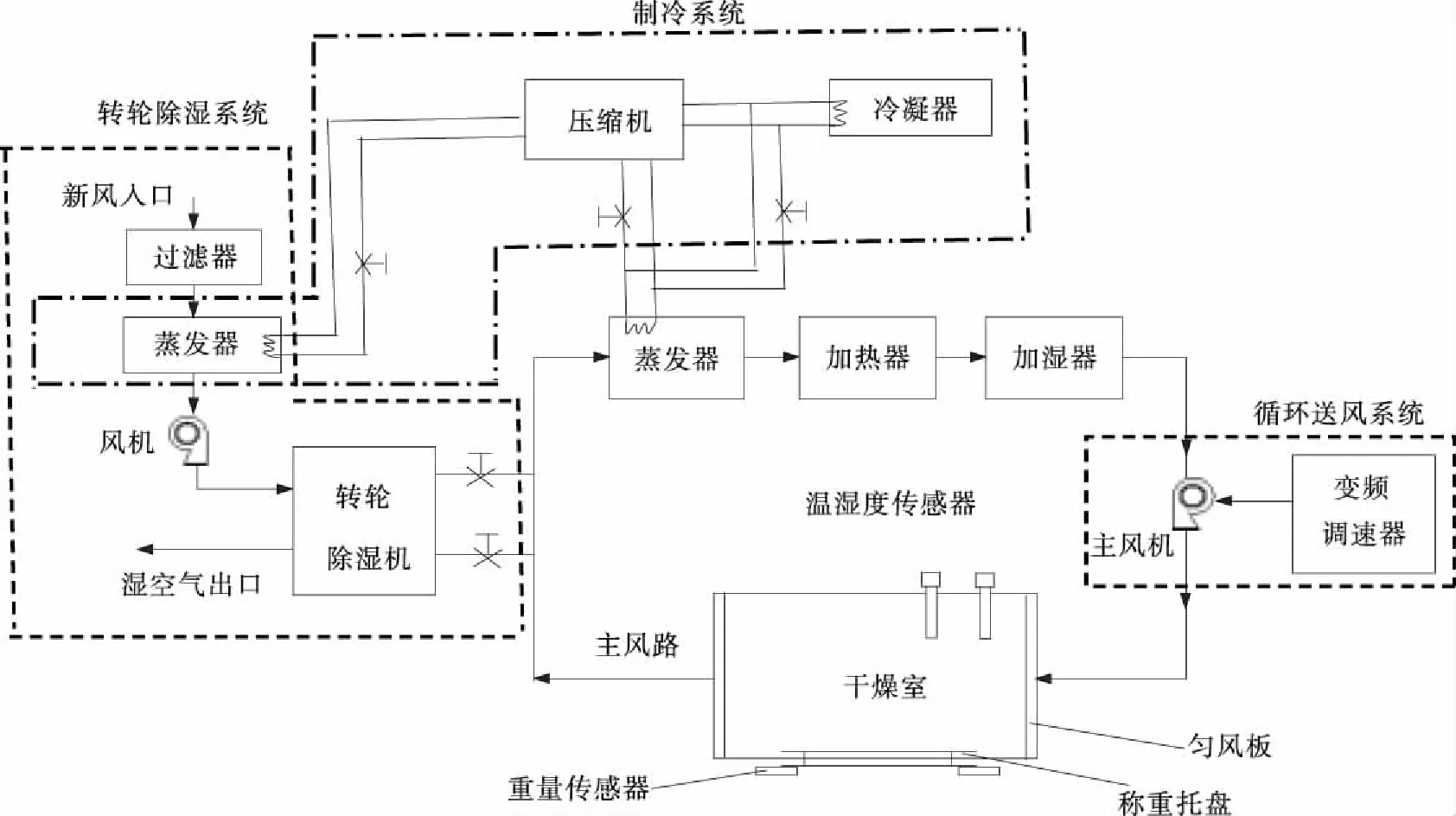
圖8 整機(jī)結(jié)構(gòu)示意圖
4.4 試驗(yàn)結(jié)果
分別采用模糊PID和常規(guī)PID兩種控制方式對(duì)團(tuán)頭魴進(jìn)行干燥處理,得到的溫度響應(yīng)曲線見圖9。
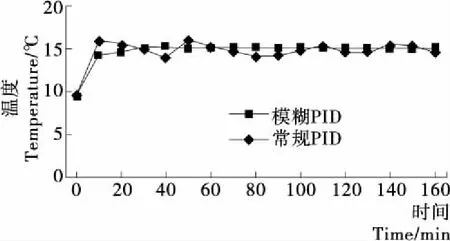
圖9 溫模糊PID和常規(guī)PID響應(yīng)曲線
由圖9可知,在團(tuán)頭魴的干燥過(guò)程中,與常規(guī)PID控制相比,模糊PID控制條件下的溫度調(diào)節(jié)時(shí)間縮短了10 min,超調(diào)量下降了3 ℃,約2 h時(shí)即達(dá)到設(shè)定溫度值,穩(wěn)態(tài)誤差為±0.5 ℃,均小于常規(guī)PID控制。試驗(yàn)結(jié)果表明:模糊PID控制相較于常規(guī)PID控制更能滿足參數(shù)時(shí)變系統(tǒng)的響應(yīng)要求,適應(yīng)性更好。
5 討論
本研究利用MATLAB軟件,采用離線方式計(jì)算出查詢表,并進(jìn)行模擬仿真。應(yīng)用STEP-7設(shè)計(jì)控制程序,解決了PID參數(shù)在線自整定難的問(wèn)題。實(shí)際運(yùn)行結(jié)果表明,模糊PID控制精度提高,響應(yīng)速度快,超調(diào)量小,達(dá)到令人滿意的效果。
針對(duì)干燥過(guò)程溫濕度的模糊PID控制器的設(shè)計(jì),其關(guān)鍵是模糊查詢表的設(shè)計(jì),而模糊查詢表的設(shè)計(jì)仍然是根據(jù)專家經(jīng)驗(yàn)和試驗(yàn)總結(jié)進(jìn)行優(yōu)化得到的,有一定的局限性。為了進(jìn)一步提高系統(tǒng)性能,可以采用其他智能控制技術(shù)與模糊控制相結(jié)合的控制方法。
[1] 黃立新, 陳國(guó)華, ARUN S Muiumdar. 干燥技術(shù)最新研究進(jìn)展和展望[J]. 干燥技術(shù)與設(shè)備, 2007, 5(5): 215-219.
[2] 趙存洋. 節(jié)能型果蔬熱風(fēng)干燥實(shí)驗(yàn)裝置及控制系統(tǒng)研究[D]. 北京: 中國(guó)農(nóng)業(yè)機(jī)械化科學(xué)研究院, 2011: 15-21.
[3] 羅剛, 黃遠(yuǎn)洋. 節(jié)能型恒溫恒濕箱的研制[J]. 機(jī)械設(shè)備, 2005(8): 51-52.
[4] 劉偉濤. 小型太陽(yáng)能干燥設(shè)備研制及試驗(yàn)研究[D]. 廣州: 華南理工大學(xué), 2010: 20-24.
[5] 劉友明, 趙思明, 熊善柏, 等. 魚面的高溫高濕干燥工藝研究[J]. 食品科技, 2007(5): 221-223.
[6] 楊世勇, 徐國(guó)林. 模糊控制與PID控制的對(duì)比及其復(fù)合控制[J]. 自動(dòng)化技術(shù)與應(yīng)用, 2011, 30(11): 21-25.
[7] 吳宏鑫, 沈少萍. PID控制的應(yīng)用與理論依據(jù)[J]. 控制工程, 2003, 10(1): 37-42.
[8] 吳曉強(qiáng), 李亞莉, 周紅杰, 等. 基于模糊PID的茶葉烘干機(jī)恒溫控制系統(tǒng)研究[J]. 食品與機(jī)械, 2015, 31(4): 111-113, 255.
[9] 聶少伍, 黃漢英, 胡月來(lái), 等. 基于PLC谷物脈沖微波殺蟲機(jī)自動(dòng)控制系統(tǒng)[J]. 制造業(yè)自動(dòng)化, 2014, 36(10): 142-144, 153.
[10] 盧燕, 羅青華, 魏克新. PLC實(shí)現(xiàn)的模糊PID控制器及在高爐布料系統(tǒng)中的應(yīng)用[J]. 天津理工大學(xué)學(xué)報(bào), 2008, 24(2): 73-75.
[11] 王述彥, 師宇, 馮忠緒. 基于模糊PID控制器的控制方法研究[J]. 機(jī)械科學(xué)與技術(shù), 2011, 30(1): 166-172.
[12] 李敬兆, 湯文兵. PLC實(shí)現(xiàn)的模糊PID控制器及在高濃度啤酒稀釋系統(tǒng)中的應(yīng)用[J]. 工業(yè)控制計(jì)算機(jī), 2006, 19(7): 7-9.
[13] 趙永娟, 孫華東. 基于MATLAB的模糊PID控制器的設(shè)計(jì)和仿真[J]. 微計(jì)算機(jī)信息, 2009, 25(1): 48-50.
[14] 李敬兆, 湯文兵, 顧榮榮. PLC實(shí)現(xiàn)的模糊PID控制器及其在通風(fēng)機(jī)風(fēng)量調(diào)節(jié)系統(tǒng)中的應(yīng)用[J]. 江南大學(xué)學(xué)報(bào): 自然科學(xué)版, 2006, 8(5): 422-426.
[15] 方良材, 黃衛(wèi)萍. 基于MATLAB的果酒發(fā)酵溫度PID控制系統(tǒng)比較研究[J]. 食品與機(jī)械, 2014, 30(3): 83-86.
Fuzzy PID controller based on PLC and application on hot air drying chamber
WANG Pan1HONGYuan-qian1HUANGHan-ying1HUYue-lai1NIEShao-wu1ZHAOSi-ming2
(1.CollegeofEngineeringandTechnology,HuazhongAgriculturalUniversity,Wuhan,Hubei430070,China;2.CollegeofFoodScienceandTechnology,HuazhongAgriculturalUniversity,Wuhan,Hubei430070 ,China)
According to the non-linearity and large-lag phenomena in temperature and humidity in hot air drying process, conventional PID control and fuzzy control were combined using fuzzy PID control theory in the system. A Fuzzy PID controller was designed to achieve the PID parameters’ online self-tuning. Results: when the target temperature is set at 15 ℃, compared with the conventional PID control, the maximum overshoot of the hot air drying control system based on fuzzy PID control is decreased by 3 ℃, the adjustment time is reduced by 10 min and the steady state error is ± 0.5 ℃, with better dynamic and static response characteristics, and in the case of parameter changes can better adapt to the hot air drying oven engineering applications.
fuzzy PID; PLC; hot air drying; MATLAB; PID parameter self-tunin
10.13652/j.issn.1003-5788.2016.12.022
現(xiàn)代農(nóng)業(yè)技術(shù)體系建設(shè)專項(xiàng)基金(編號(hào):CARS-46-23)
王磐,男,華中農(nóng)業(yè)大學(xué)在讀碩士研究生。
黃漢英(1964—),女,華中農(nóng)業(yè)大學(xué)副教授。 E-mail:hhywmx@mailhzau.edu.cn
2016—04—08