等速肌張力測試系統(tǒng)的開發(fā)
2016-02-09 06:38:41許勝強楊先軍
中國醫(yī)療器械雜志 2016年3期
關(guān)鍵詞:系統(tǒng)
劉 坤,王 訓(xùn),陳 煒,唐 正,許勝強,程 楠,王 振,楊先軍
1 中國科學(xué)院合肥智能機械研究所,合肥市,230031
2 中國科學(xué)技術(shù)大學(xué)自動化系,合肥市,230026
3 安徽中醫(yī)藥大學(xué)神經(jīng)病學(xué)研究所附屬醫(yī)院,合肥市,230061
4 安徽省體育科學(xué)技術(shù)研究所,合肥市,230001
等速肌張力測試系統(tǒng)的開發(fā)
【作 者】劉 坤1,2,王 訓(xùn)3,陳 煒4,唐 正1,許勝強1,2,程 楠1,3,王 振1,楊先軍1
1 中國科學(xué)院合肥智能機械研究所,合肥市,230031
2 中國科學(xué)技術(shù)大學(xué)自動化系,合肥市,230026
3 安徽中醫(yī)藥大學(xué)神經(jīng)病學(xué)研究所附屬醫(yī)院,合肥市,230061
4 安徽省體育科學(xué)技術(shù)研究所,合肥市,230001
針對帕金森病患者的肌張力障礙,該文設(shè)計了一種新型等速肌張力測試系統(tǒng)。該系統(tǒng)包括機械裝置、數(shù)據(jù)采集單元和上位機數(shù)據(jù)處理分析軟件。其中機械裝置包括手臂支撐裝置、安全限位裝置、高度調(diào)節(jié)裝置等;數(shù)據(jù)采集單元由力矩傳感器模塊、電機控制模塊、數(shù)據(jù)通信模塊等組成,用于控制手臂進行等速運動并將傳感器的模擬信號轉(zhuǎn)換成數(shù)字信號實時傳輸?shù)缴衔粰C;上位機數(shù)據(jù)處理分析軟件采用USB接口傳輸數(shù)據(jù),基于VC++程序開發(fā),完成數(shù)據(jù)處理、顯示、存儲及報表生成等功能。實驗結(jié)果表明:設(shè)計的等速肌張力測試系統(tǒng)安全可靠,不僅能夠較好地評估帕金森患者的肌張力異常程度,還能應(yīng)用于輔助肌張力患者的康復(fù)訓(xùn)練,具有較強的可擴展性。
帕金森病;肌張力障礙;等速測量;USB通信
0 引言
帕金森病(PD)又稱震顫麻痹,是發(fā)生于中老年人群的退行性神經(jīng)系統(tǒng)變性疾病,其典型臨床表現(xiàn)為靜止性震顫、肌僵直、運動遲緩和姿勢反射障礙[1],其中肌僵直的主要臨床表現(xiàn)形式為肌張力異常,對病人的生活質(zhì)量造成嚴重影響,客觀準(zhǔn)確地測量PD患者的肌張力狀態(tài),尤其是根據(jù)治療PD藥物對肌張力的影響進行分析具有十分重要的臨床意義[2]。
當(dāng)前評估PD患者肌張力狀態(tài)的方法主要有量表評估與儀器測量。其中量表評估多以ashworth(MaS)量表為依據(jù)[3],由于是徒手評估,受醫(yī)生主觀影響較大,可信度較低。臨床上出現(xiàn)的測量儀器按手臂測試狀態(tài)主要有等長和等速兩種類型儀器。其中等長測試類有美國的Myotonometer[4]、徐秀林等[5]研制的等長肌力測試儀等,用于測量靜息狀態(tài)下的肌張力大小,操作簡單,但由于手臂處于靜止?fàn)顟B(tài)不能獲取患者的運動性肌張力,而運動性肌張力才是保證肌肉運動連續(xù)、平滑(無顫抖、抽搐、痙攣)的重要因素,因此等長測試儀器不完全符合臨床要求。等速測試類主要有美國BIoDeX為代表的多關(guān)節(jié)等速肌力測試系統(tǒng),能夠提供詳細的等速運動中各項肌肉功能參數(shù)以及清晰的力矩曲線,對肌張力狀態(tài)評估給出客觀準(zhǔn)確的評價[6],但該系統(tǒng)針對全身關(guān)節(jié)進行測試,存在體積龐大、造價過高等缺點,因此臨床應(yīng)用較少。此外,Wright D等[7]研制的便攜式肌張力測試系統(tǒng)用于測量運動過程中患者的肌電信號,可以很好地區(qū)分正常人和帕金森病患者,但是對于肌張力異常程度缺乏可靠的評估。因此針對以上問題,本文研制了一種等速肌張力測試系統(tǒng),它通過伺服電機配以安全裝置和相關(guān)傳感器驅(qū)動患者手臂進行等速測試,結(jié)構(gòu)簡單、成本低、安全性高,可以直接測量帕金森病患者的動態(tài)肌張力大小,符合臨床應(yīng)用要求。
1 機械裝置設(shè)計
系統(tǒng)在測試之前需保持肘關(guān)節(jié)運動軸心與系統(tǒng)運動軸軸心基本一致,再用柔性繃帶固定上臂和腕部,通過數(shù)據(jù)采集單元的電機控制模塊驅(qū)動電機帶動患者手臂進行等速運動。由于不同患者的身高、臂長存在差異性,因此系統(tǒng)機械結(jié)構(gòu)設(shè)計不僅要保證測試安全還必須針對不同個體具有可調(diào)性。根據(jù)上述特點,系統(tǒng)機械結(jié)構(gòu)設(shè)計為整體高度可調(diào)以適應(yīng)不同測試體位(坐姿、臥姿),腕部支撐結(jié)構(gòu)和高度調(diào)節(jié)桿均長度可調(diào),腕部支撐結(jié)構(gòu)和上臂固定結(jié)構(gòu)角度可調(diào)。為保證測試安全,除了軟件限位外,系統(tǒng)在減速機輸出軸與末端運動軸之間設(shè)有安全離合器,使減速機輸出軸和末端運動軸在電機輸出扭矩超過設(shè)定值時瞬間脫離,并且停止手臂運動。此外,系統(tǒng)在運動軸末端還配以相應(yīng)的機械硬限位結(jié)構(gòu),具體設(shè)計為在一個環(huán)狀機械盤上加工24個螺孔,控制精度為15°,其中4個用于固定環(huán)狀機械盤。同時在運動軸末端徑向安裝一個長度為8 cm的限位柱,再配以兩個定位銷按照測試角度要求安裝在環(huán)狀機械盤上,將手臂撐桿限制在規(guī)定位置內(nèi)。系統(tǒng)機械裝置整體設(shè)計框架如圖1所示,裝置示意圖如圖2所示。

圖1 機械裝置設(shè)計框架Fig.1 Mechanical device design frame
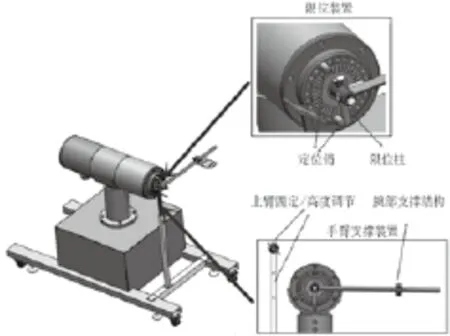
圖2 機械裝置示意圖Fig.2 Schematic diagram of mechanical device
2 數(shù)據(jù)采集單元設(shè)計
數(shù)據(jù)采集單元主要功能為等速運動控制、角度和力矩信號采集、數(shù)據(jù)實時傳輸、安全保護等,采用具有32位aRM cortexTM-M3內(nèi)核的STM32F205ZeT6[8]作為處理器核心,主要包括電源模塊、USB通信模塊、電機控制模塊、力矩傳感器模塊、外圍電路等。由于系統(tǒng)存在伺服電機,電磁干擾比較大,因此在電路設(shè)計中需要注意減少來自伺服電機的電磁干擾。系統(tǒng)數(shù)據(jù)采集單元設(shè)計框架如圖3所示。

圖3 數(shù)據(jù)采集單元設(shè)計框架Fig.3 Data acquisition unit design framework
2.1 電源模塊
數(shù)據(jù)采集單元電路輸入電壓為24 V,采用VRB1205ZP-6WR2作為第一級電壓轉(zhuǎn)換芯片,將24 V電壓轉(zhuǎn)換為5 V電壓,給需要5 V電壓的模塊提供穩(wěn)定電壓,然后再采用LM1117MP-3.3作為電壓轉(zhuǎn)換芯片將5 V電壓轉(zhuǎn)換為3.3 V電壓。其中由于伺服電機的電磁干擾比較強,電路供給伺服控制器的5 V電壓需要經(jīng)過B0505S-2W電源模塊進行隔離。整個電源模塊為系統(tǒng)提供穩(wěn)定電壓,抗干擾能力強。
2.2 數(shù)據(jù)通信模塊
數(shù)據(jù)采集單元設(shè)計中數(shù)據(jù)通信有串口通信、USB通信。其中USB用于和上位機Pc客戶端通信,進行數(shù)字信號傳輸,數(shù)據(jù)采樣頻率為500 Hz。串口用于和伺服控制器通信,發(fā)送控制命令信息,電路采用MaX232cSe作為電平轉(zhuǎn)換芯片。
2.3 電機控制模塊
由于測試過程中手臂位置和力矩不斷變化,為了保證等速測試,系統(tǒng)對電機控制采用閉環(huán)控制,在測試過程中加入光電碼盤實時采集運動過程中的手臂位置信號,中央處理器根據(jù)終端手臂位置變化量實時控制電機輸出,以保持整個測試過程中的等速運動,最終形成對電機的閉環(huán)控制。電機控制模塊對手臂運動范圍可以設(shè)置1°~10°的緩沖角度以保證測試安全及運動的平穩(wěn)性。電機控制模塊對電機位置及速度的控制采用脈沖輸入控制模式,通過I/o口發(fā)送脈沖信號,控制手臂等速運動,信號傳輸電路采用集極開路(單相最高脈沖頻率200 kHz)方式,命令的形式為脈沖加方向。光電碼盤采用增量式旋轉(zhuǎn)編碼器作為系統(tǒng)終端速度檢測元件,得到aB相脈沖波經(jīng)過LS7084芯片進行解碼后發(fā)送給中央處理器進行處理。光電碼盤信號處理電路圖如圖4所示。
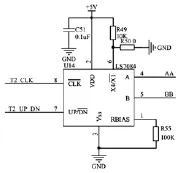
圖4 光電碼盤電路圖Fig.4 Photoelectric encoder diagram
2.4 力矩傳感器模塊
系統(tǒng)力矩信息的獲取采用應(yīng)變片扭矩傳感器[9],通過將電阻應(yīng)變片粘貼在儀器運動軸表面相應(yīng)位置,在測試過程中軸受到手臂力矩作用產(chǎn)生應(yīng)變,致使電阻應(yīng)變片的電阻發(fā)生變化,通過惠斯頓電橋和測量電路把應(yīng)變轉(zhuǎn)換成電信號傳輸給數(shù)據(jù)采集單元中的力矩傳感器模塊進行處理,最終得到力矩值。
力矩傳感器模塊的信號調(diào)理采用TI公司的單電源自動歸零傳感器放大器PGa308芯片,支持可編程增益與偏置,可放大傳感器信號,并實現(xiàn)歸零(偏置)與擴展(增益)的數(shù)字校準(zhǔn),同時采用LM324四運算放大器構(gòu)成Sallen-key低通濾波器,對力矩信號進行濾波處理,電路圖如圖5所示。
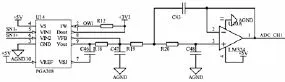
圖5 力矩傳感器模塊電路圖Fig.5 circuit diagram of torque sensor module
3 數(shù)據(jù)處理分析軟件設(shè)計
數(shù)據(jù)處理分析軟件選用VS2010開發(fā)環(huán)境,基于MFc應(yīng)用程序框架設(shè)計和實現(xiàn),主要功能有:數(shù)據(jù)采集顯示(包括力矩、角度等),數(shù)據(jù)分析與報表生成,數(shù)據(jù)存儲(病人、醫(yī)生信息及測量數(shù)據(jù)的存儲[10])以及歷史回放(根據(jù)存儲數(shù)據(jù)回放運動過程)等。數(shù)據(jù)處理分析軟件與數(shù)據(jù)采集單元通過USB接口實現(xiàn)數(shù)據(jù)通信,USB驅(qū)動程序基于NI-VISa進行開發(fā),NI-VISa(Virtual Instrument Software architecture)是美國國家儀器公司(National Instrument)開發(fā)的一種用來與各種儀器總線進行通信的高級應(yīng)用編程接口,提供了非常強大的儀器控制與資源管理功能,極大地提高了軟件的開發(fā)效率[11]。
軟件界面和軟件操作流程圖分別如圖6和圖7所示。
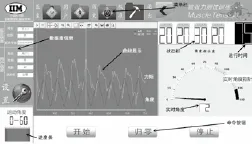
圖6 軟件運行界面Fig.6 Software running interface

圖7 軟件操作流程Fig.7 Software operation process
3.1 NI-VISA驅(qū)動設(shè)計
NI-VISa自3.0版起,支持USB通信,有2種類型的VISa資源參與支持:USB INSTR和USB RaW。符合“USB測試和測量類型(USBTMc)”協(xié)議的USB設(shè)備為USB INSTR,不符合的為USB RaW設(shè)備。USB INSTR無需配置即可實現(xiàn)與USBTMc設(shè)備的通信,而USB RaW則需要通過配置NI-VISa才能控制USB設(shè)備。數(shù)據(jù)采集單元軟件設(shè)計時的規(guī)范并不參照USB INSTR,因此需要NI-VISa配置驅(qū)動程序,可以分為以下三個步驟,如圖8所示。

圖8 NI-VISa配置步驟Fig.8 confguration steps of NI-VISa
在USB驅(qū)動開發(fā)中,儀器的制造商代碼和產(chǎn)品代碼分別是:0x0483和0x2015,儀器描述符為USB0::0 x0483::0x2015::0000000000001::RaW。儀器USB驅(qū)動利用了2類USB實現(xiàn)通信,分別為控制端點和批量端點,用于發(fā)送命令和傳輸數(shù)據(jù)。Pc端識別底層設(shè)備之后,上位機軟件與USB設(shè)備通信采用DLL動態(tài)鏈接庫調(diào)用來實現(xiàn)。由于NI公司公開了NI-VISa常用的所有aPI函數(shù)的接口定義和源代碼,我們只需要把庫函數(shù)封裝成DLL動態(tài)鏈接庫文件,上位機軟件開發(fā)時對其進行簡單的輸入、輸出調(diào)用即可,極大地提高了開發(fā)效率[12]。
3.2 特征參數(shù)提取的軟件實現(xiàn)
Pc端接收到數(shù)據(jù)采集單元提供的數(shù)據(jù)為時間戳、力矩和角度信號,通過均值平滑濾波算法對數(shù)據(jù)進行濾波處理,最后進行相關(guān)特征參數(shù)提取。測試結(jié)果包括原始數(shù)據(jù)和相關(guān)特征參數(shù),可以通過報表或csv文本文件形式顯示和保存。對肌張力評價有重要意義的特征參數(shù)主要有[13]:(1)峰力矩PT,代表了肌肉收縮產(chǎn)生的最大肌力,具有較高重復(fù)性和準(zhǔn)確性,為黃金指標(biāo)和參照值;(2)力矩加速能Tae;(3)平均功率aP;(4)峰力矩體重比(PT/BW);(5)平均關(guān)節(jié)活動度(aRoM)等。現(xiàn)階段除了峰力矩用于被動測試,后面參數(shù)均為病人做主動等速運動時的特征參數(shù),被動測試中的其他參數(shù)提取有待后期進一步研究。特征參數(shù)提取處理過程具體如圖9所示。

圖9 特征參數(shù)提取過程圖Fig.9 Feature extraction procedure
4 系統(tǒng)精度驗證
對等速肌張力測試系統(tǒng)精度進行實驗驗證,首先根據(jù)力與力矩之間的正比例關(guān)系對系統(tǒng)進行力矩標(biāo)定,數(shù)據(jù)處理分析軟件獲取到的力矩信號為aD值,標(biāo)定公式如式(1)和式(2),式中k、F、L、TAD、TAD0、T分別表示實際力矩與力矩aD值的比例系數(shù)、受力大小、測試點距離運動軸中心線距離、力矩信號AD值、力矩信號零點AD值、實際力矩:

對系統(tǒng)靜態(tài)條件下進行精度驗證,在手臂支撐桿距離運動軸中心線距離為0.4 m處分別加上50 N、100 N、150 N砝碼進行連續(xù)三次測試,測試數(shù)據(jù)如表1。
從表1數(shù)據(jù)可以看出,系統(tǒng)靜態(tài)測試誤差在1 N·m以內(nèi),具有較好的測試精度;在系統(tǒng)動態(tài)測試精度驗證中,我們選取沒有任何相關(guān)疾病的年輕受試者進行測試,針對受試者的峰力矩測試數(shù)據(jù)結(jié)果顯示:系統(tǒng)重復(fù)性存在一定誤差,約為±1.15 N·m。根據(jù)以上測試精度,在臨床應(yīng)用中,對于肌張力增高類型的患者具有較好的區(qū)分度,但對于肌張力過低的患者系統(tǒng)目前不能較好的進行區(qū)分。造成誤差的原因:(1)減速機的回程間隙導(dǎo)致系統(tǒng)在運動的起點和終點處產(chǎn)生抖動干擾;(2)溫度、濕度等環(huán)境因素導(dǎo)致實驗結(jié)果受到干擾;(3)受測者主觀原因,測試過程中不自覺發(fā)力,沒有保證全程的被動測試。解決辦法:(1)采用回程間隙更小、精度更高的減速機以及安全離合器來減小轉(zhuǎn)動干擾;(2)在數(shù)據(jù)采集單元中加入消除溫度漂移的電路模塊等;(3)告知受測者完整的測試步驟,讓其保持充分放松狀態(tài)。

表1 靜態(tài)測試數(shù)據(jù)Tab.1 Test data of static
5 總結(jié)
本文設(shè)計了一種新型等速肌張力測試系統(tǒng),不僅能夠測量帕金森病患者的肌張力,還能實現(xiàn)肌張力測量數(shù)據(jù)中的峰力矩等特征參數(shù)的提取,實現(xiàn)了患者肌張力異常程度的評價,可為臨床醫(yī)師對患者的診療評估提供重要參考依據(jù)。該系統(tǒng)成本低、結(jié)構(gòu)簡單、安全性高。
[1] Maetzler W, Hausdorff JM. Motor signs in the prodrom al phase of Parkinson's disease[J]. Movem Disord, 2012, 27(5): 627-633.
[2] 楊明會, 李敏, 李紹旦, 等. 帕金森患者肌張力的客觀定量分析[J]. 疑難病雜志, 2010, 9(11):811-813.
[3] Blackburn M, van Vliet P, Mockett SP. Reliability of measurements obtained with the modifed ashworth scale in the lower extremities of people with Stroke[J]. Phys Ther, 2002, 82(1): 25-34.
[4] Marusiak J, Kisiel-Sajewicz K, Jaskolska a, et al. Higher muscle passive stiffness in Parkinson’s disease patients than in controls measured by myotonometry[J]. arch Phys Med Rehabilit, 2010, 91(5): 800-802.
[5] 徐秀林, 蔣奇永, 嚴榮國, 等. 基于藍牙通信的等長肌力測試儀的設(shè)計[J]. 中國生物醫(yī)學(xué)工程學(xué)報, 2011, 30(6): 897-903.
[6] Zawadzki J, Bober T, Siemienski a. Validity analysis of the Biodex System 3 dynamometer under static and isokinetic conditions[J]. acta Bioeng Biomech, 2010, 12(4): 25-32.
[7] Wright D, Nakamura K, Maeda T, et al. Research and development of a portable device to quantify muscle tone in patients with Parkinsons Disease[c]. Ieee eMBS, 2008: 2825-2827.
[8] 林己,廖一鵬. 基于STM32的伺服電機控制方法研究與設(shè)計[J].工業(yè)控制計算機, 2013, 26(3): 4-7.
[9] 胡得福.應(yīng)變式扭矩傳感器的設(shè)計技術(shù)[J]. 船舶工程, 2011,33(4): 96-99.
[10]李健平, 戴子文, 王雪力, 等. 基于oDBc的Visual c++ 應(yīng)用程序設(shè)計[J]. 甘肅科技縱橫, 2011, 40(2): 23-24.
[11]謝印忠, 張保洲. Vc++平臺下的虛擬儀器應(yīng)用研究[J]. 計算機測量與控制, 2010, 18(1): 237-239.
[12]王學(xué)偉, 張未未. USB-GPIB控制器VISa函數(shù)庫的開發(fā)及在Visual c++中的應(yīng)用[J]. 電測與儀表,2006, 43(11): 50-53.
[13]黃志平, 尹彥, 劉敏, 等. 等速肌力測試與訓(xùn)練技術(shù)的研究進展[J]. 體育科技, 2011, 32(4): 52-58.
Development of Isokinetic Muscle Tone Testing System
【 Writers 】LIU Kun1,2, WANG Xun3, CHEN Wei4, TANG Zheng1, XU Shengqiang1,2, CHENG Nan1,3, WANG Zhen1, YANG Xianjun1
1 Institute of Intelligent Machines, Chinese Academy of Sciences, Hefei, 230031
2 Department of Automation, University of Science and Technology of China, Hefei, 230026
3 Institute of Neurology, Affliated Hospital, Anhui University of Chinese Medicine, Hefei, 230061
4 Sports Science and Technology Research Institute of Anhui Province, Hefei, 230001
【 Abstract 】A new type of isokinetic muscle tone testing system was designed for the Parkinson’s patients with dysmyotonia. The system consists of a mechanical device, a data acquisition unit, and a data processing and analyzing software. The mechanical device comprises an arm supporting device, a safety limiting device and a height adjusting device. Data acquisition unit, composed of a torque sensor module, a motor control module, a data communication module, and so on, is used to control the arm at constant speed and convert the sensor's analog signal into digital signal, then the signal is transmitted to the computer in real-time by USB interface. The data processing and analyzing software, developed by VC++, has fnished the data processing, display, storage, generated the reports, et al. The experimental results show that this system is reliable and safe, not only can evaluate the degree of abnormal muscle tone in Parkinson’s patients, but also can be used in the rehabilitation training of patients with dysmyotonia, which has strong expansibility.
Parkinson, dysmyotonia, isokinetic testing, USB communication
R318.6
A
10.3969/j.issn.1671-7104.2016.03.001
1671-7104(2016)03-0157-04
2015-12-10
國家科技支撐計劃(2013BaH14F01);安徽省科技攻關(guān)計劃課題(1301042215,1501021042)
劉坤,e-mail: kunlaw@mail.ustc.edu.cn
楊先軍,e-mail: xjyang@iim.ac.cn
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32