內模隨動控制在電廠脫硝控制系統中的應用
2016-02-05 11:37:19陳亮
山東電力技術 2016年12期
陳亮
(華能濟寧運河發電有限公司,山東濟寧272100)
內模隨動控制在電廠脫硝控制系統中的應用
陳亮
(華能濟寧運河發電有限公司,山東濟寧272100)
根據電廠鍋爐煙氣氮氧化物(NOx)的控制特點,辨識出鍋爐煙氣NOx被控對象的數學模型,設計應用SCR脫硝內模隨動控制系統并應用在OC6000e分散控制系統組態中。實踐應用表明SCR脫硝內模隨動控制系統具有良好的抗擾能力及對象時變適應性。
內模控制;脫硝;噴氨控制
0 引言
我國2011年通過的“十二五”規劃綱要中,氮氧化物(NOx)排放治理被列為現階段減排重點。在此背景下,新裝火力發電機組將配套安裝脫硝裝置,而已經建成投產的機組也陸續通過設備工藝改造加裝SCR或SNCR脫硝系統。
1 SCR煙氣脫硝原理及傳統控制方法
選擇性催化還原法(SCR)工藝是一項成熟的工業脫硝技術,它的原理是,在煙氣溫度為300~400℃、催化劑作用下,有選擇地將NO和NO2還原成N2,而幾乎不發生NH3和O2的氧化反應。理論上,通過合理地控制反應區溫度及噴氨量,可確保NH3逃逸量較低的同時,脫硝效率維持在90%以上。SCR工藝主要化學反應
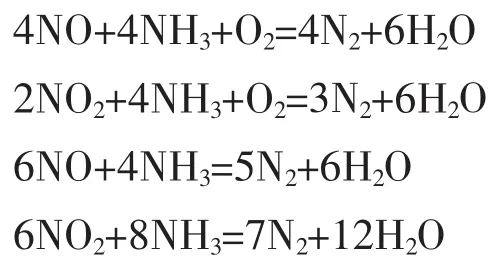
在SCR工藝中,最重要的控制當屬噴氨控制。當NH3與NOx混合反應區摩爾比為1時,脫硝效率達到最高。如果噴氨量過低,SCR出口NOx含量相對升高,脫硝效率降低,達不到減排要求;噴氨量過高,則氨逃逸量會升高,不僅不經濟,還會在SCR反應區后的低溫區域(空氣預熱器)同煙氣中的酸性物質反應生成結晶導致空氣預熱器堵塞,更會造成有毒物質氨排放二次污染[1]。
噴氨流量的精確、合理控制是SCR工藝高效運行的前提。但是,由于NH3與NOx的反應是一個大遲延、大慣性的過程,加之NOx在線監測儀表CEMS的過濾—連續抽樣—冷凝—二次過濾—化學分析過程也具有顯著的遲延性,在此類大遲延的系統中,噴氨流量調節門改變后,總需要經過一個漫長的遲延時間,才能波及NOx監測量改變,因此傳統的PID控制總是發生明顯的滯后性超調甚至呈發散特性;不僅如此,火力燃煤發電機組鍋爐中的燃燒及風量變化都會對NOx的生成產生影響,在調峰機組乃至AGC調峰機組中,由于給煤量和風量的時變性及對煙氣NOx變化的強擾動特性,導致來自系統內外擾動極大,傳統的手動控制、PID自動控制等現場控制手段難以解決此類工業控制難題[2]。
2 煙氣脫硝系統內模控制原理
內模控制(IMC)是一種基于過程數學模型進行控制設計的新型控制策略,原理是將實際被控對象同被控對象的數學模型之間的誤差同系統設定值相比較,由被控對象的逆模型求得實時控制量。IMC的結構如圖1所示。

圖1 IMC結構
圖1中,PV為被控對象過程量,SP為被控對象設定值,Gp為現場過程,Gm為現場過程仿真模型,Gn為擾動過程,Gc為現場過程內模控制器,Gf為濾波器。濾波器的意義在于,可以配合Gc共同改善系統的穩定性和魯棒性。
由圖1可得系統輸出為

式中:ypv(s)為系統輸出狀態;rsp(s)為系統給定;n(s)為系統擾動。假定過程環節Gp,Gm和Gc都是穩定的,當模型與被控對象傳遞函數相等時,若控制器Gc為模型Gm的逆,且濾波器傳遞函數為1,則有, Gf=1,那么
在給定值擾動下,ypv(s)=rsp(s)
在外部擾動時,ypv(s)=0
這說明,若辨識所得過程數學模型同現場過程完全相等,那么內模控制系統在任何時間內都能消除任何外部擾動,且能夠消除同設定值的靜態偏差。
內模控制性質:
1)Gp=Gm時的內模控制具有對偶穩定特性,控制系統相當于開環控制,只要開環部分Gp穩定,控制器Gc穩定,則整個系統穩定。
3)內模控制系統具有零穩態偏差特性,只要Gp穩定,即使Gp≠Gm,只要控制器傳遞函數的增益為模型增益的倒數,則系統在響應輸入偏差及擾動后仍能夠消除靜態偏差[3]。
3 煙氣脫硝內模控制系統設計
燃煤發電機組NOx排放量屬于傳統PID控制器難以控制被控對象,通過階躍擾動動態特性試驗可以明顯看出該對象的大遲延、大慣性、強擾動特點。結合動態特性試驗,根據系統辨識法,求得了兩臺機組NOx排放量在偏差為階躍輸入、工況平穩無擾動時的近似數學模型,其降階后傳遞函數為
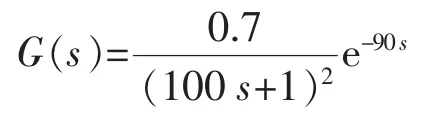
事實上,鍋爐排煙NOx含量的變化是一個很復雜的過程,受到來自機組負荷、風量、煤量、煤種、低氮燃燒器頂部燃盡風SOFA風門開度等參數影響很大,且都具有不同的遲延特性,因此對所有擾動逐一解耦是難以實現的;另外NOx在線監測分析系統CEMS具有自動防堵取樣管吹掃功能,吹掃過程中NOx檢出值被閉鎖防止大幅波動,但系統NOx真實值是實時變化的,吹掃結束后NOx檢出值存在無法預期的趨勢,因此NOx被控對象還具有一定的非線性特性。因此選用內模控制是非常合適的,因為根據IMC理論,內模控制的性質決定了當過程數學模型與實際控制對象失配時,內模控制的PV仍逼近SP,具有高度自適應性[4]。
NOx排放量的內模控制系統中不使用經典的PID控制器,而采用NOx被控對象的過程辨識模型及其內模控制器進行實時處理。利用工業現場任何品牌DCS都具有的DELAY遲延功能塊和LEAD/LAG超前滯后功能塊即可實現。由于被控對象的最小相位部分近似為二階慣性環節,因此內模控制器采用其最小相位部分的逆模型串接二階慣性濾波器來實現。此時,系統需要整定的參數只有二階慣性濾波器的時間常數,參數選取合適時便可以大大提高系統的快速性和魯棒性,在工業現場非常便于實現。另外針對NOx含量擾動影響較大的風、煤因素,以鍋爐主控輸出及總風量作為NOx的設定值偏置,組成NOx內模隨動控制系統以提高負荷響應的能力。SAMA圖設計如圖2所示。
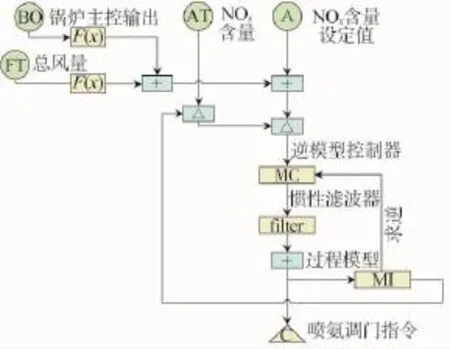
圖2 IMC脫硝控制SAMA圖
4 煙氣脫硝內模控制在OC6000e分散控制系統中的應用
OC6000e分散控制系統中提供了DELAY遲延功能塊和LEAD/LAG超前滯后功能塊。利用其搭建NOx被控對象的過程控制策略。構建SAMA圖如圖3所示。

圖3 IMC脫硝控制在OC6000e中的邏輯組態
過程數學模型及逆模型控制器參數根據系統辨識求取的傳遞函數進行設置。慣性濾波器參數同逆模型控制器參數一并設置在控制器LEAD/LAG功能塊中。鍋爐主控輸出及總風量隨動環節的增益和時間常數分別根據鍋爐主控擾動及風量階躍擾動試驗求得。
5 煙氣脫硝內模控制效果分析
排放量內模控制在華能華能濟寧運河發電公司1號、2號機組投運后,NOx煙氣含量在鍋爐負荷、風量無擾動時的試驗趨勢如圖4~6所示。
在鍋爐負荷、風量、煤量擾動存在且大幅波動時,NOx控制的動態特性如圖7所示。
Internal Model Servo Control System Used in Power Plant Denitrification Control System
CHEN Liang
(Huaneng Jining Yunhe Power Generation Co.,Ltd.,Jining 272100,China)
According to characteristics of the power plant boiler flue gas control of nitrogen oxides,the mathematical model of the controlled object of the boiler flue gas NOxis identified,then the SCR denitration internal model servo control system is designed and applied in OC6000e distributed control system.Practical application shows the SCR denitration internal model servo control system has good immunity and adaptability.
internal model control;denitration;ammonia injection control
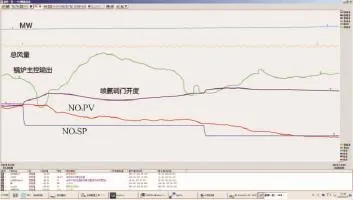
圖4 IMC脫硝控制設定值階躍擾動特性1
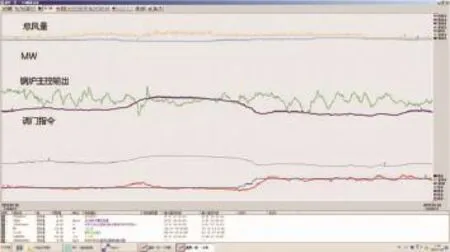
圖5 IMC脫硝控制設定值階躍擾動特性2

圖6 IMC脫硝控制設定值階躍擾動及負荷擾動特性
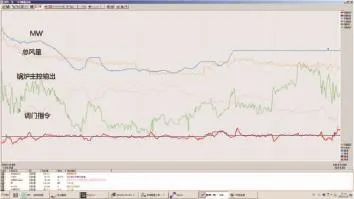
圖7 1號機組IMC脫硝控制曲線
TK323
A
1007-9904(2016)12-0060-03
猜你喜歡
化工管理(2022年13期)2022-12-02 09:21:52
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
山東冶金(2019年2期)2019-05-11 09:12:16
測控技術(2018年2期)2018-12-09 09:00:52
家庭影院技術(2017年9期)2017-09-26 03:41:45
當代化工研究(2016年9期)2016-03-20 16:22:15
