基于多領(lǐng)導(dǎo)粒子策略的DMPSO算法在冷軋液壓APC系統(tǒng)中的應(yīng)用
2016-01-28 03:08:48魏立新王利平徐德樹楊景明
中國機(jī)械工程 2015年23期
魏立新 王利平 徐德樹 林 鵬 楊景明
燕山大學(xué)工業(yè)計算機(jī)控制工程河北省重點(diǎn)實(shí)驗(yàn)室,秦皇島,066004
?
基于多領(lǐng)導(dǎo)粒子策略的DMPSO算法在冷軋液壓APC系統(tǒng)中的應(yīng)用
魏立新王利平徐德樹林鵬楊景明
燕山大學(xué)工業(yè)計算機(jī)控制工程河北省重點(diǎn)實(shí)驗(yàn)室,秦皇島,066004
摘要:冷軋液壓伺服位置自動控制(APC)系統(tǒng)中,系統(tǒng)參數(shù)會隨著運(yùn)行時間發(fā)生改變,針對系統(tǒng)這一特性,提出了一種基于改進(jìn)動態(tài)多目標(biāo)粒子群(DMPSO)算法的PID控制器參數(shù)整定策略。當(dāng)系統(tǒng)發(fā)生變化時,該策略利用動態(tài)多目標(biāo)粒子群算法的尋優(yōu)能力和對環(huán)境變化的適應(yīng)能力重新對PID參數(shù)進(jìn)行整定和尋優(yōu)。同時,針對算法存在的易于陷入局部最優(yōu)和收斂速度較慢等缺陷,提出了一種基于多領(lǐng)導(dǎo)粒子策略的動態(tài)多目標(biāo)粒子群算法。仿真結(jié)果表明:該控制系統(tǒng)對環(huán)境變化跟蹤快,超調(diào)量小,調(diào)整時間短,性能明顯優(yōu)于傳統(tǒng)PID控制。
關(guān)鍵詞:多領(lǐng)導(dǎo)粒子;動態(tài)多目標(biāo)粒子群;APC系統(tǒng);PID控制
0引言
冷軋液壓伺服位置自動控制(APC)系統(tǒng)處于整個自動厚度控制系統(tǒng)的核心位置[1],其作用是準(zhǔn)確地控制壓下位移,該系統(tǒng)是軋機(jī)自動厚度控制系統(tǒng)的執(zhí)行終端,也是得到高質(zhì)量的冷軋板帶材的關(guān)鍵。
由于冷軋液壓APC系統(tǒng)具有時滯、大慣性、被控對象系統(tǒng)參數(shù)時變等特性,所以常規(guī)的PID控制很難使冷軋液壓APC系統(tǒng)在動態(tài)環(huán)境下達(dá)到理想的性能指標(biāo),生產(chǎn)出高品質(zhì)的產(chǎn)品。針對這些問題,很多學(xué)者提出了不同的冷軋液壓APC系統(tǒng)的PID參數(shù)整定方法,雖然取得了一定進(jìn)展,但仍存在一些問題。如:基于模糊自整定方法調(diào)整 PID 控制器參數(shù)[2],存在模糊控制的模糊規(guī)則庫適應(yīng)性差、精度低的問題;采用神經(jīng)網(wǎng)絡(luò)方法對系統(tǒng)進(jìn)行控制時[3],神經(jīng)網(wǎng)絡(luò)隸屬函數(shù)建立后無法更新;采用預(yù)測控制算法對系統(tǒng)輸出進(jìn)行預(yù)測控制時[4],對被控對象數(shù)學(xué)模型的精確度要求較高,但很多被控對象是不能確定精確數(shù)學(xué)模型的。
針對常規(guī)PID無法適應(yīng)被控對象系統(tǒng)參數(shù)隨時間變化的問題,本文提出了基于動態(tài)多目標(biāo)粒子群(DMPSO)算法的參數(shù)整定方法。并且,為了提高算法的收斂速度和參數(shù)整定的速度,防止陷入局部最優(yōu),使被控對象的系統(tǒng)參數(shù)能夠快速響應(yīng)外界環(huán)境的動態(tài)變化,提出了多領(lǐng)導(dǎo)粒子策略,提高了算法的快速性和Pareto前沿的分布多樣性。
1冷軋液壓APC系統(tǒng)原理
冷軋液壓APC系統(tǒng)主要由控制器、伺服放大器、電液伺服閥、閥控液壓缸和位移傳感器等元件組成[5],其結(jié)構(gòu)示意圖見圖1。
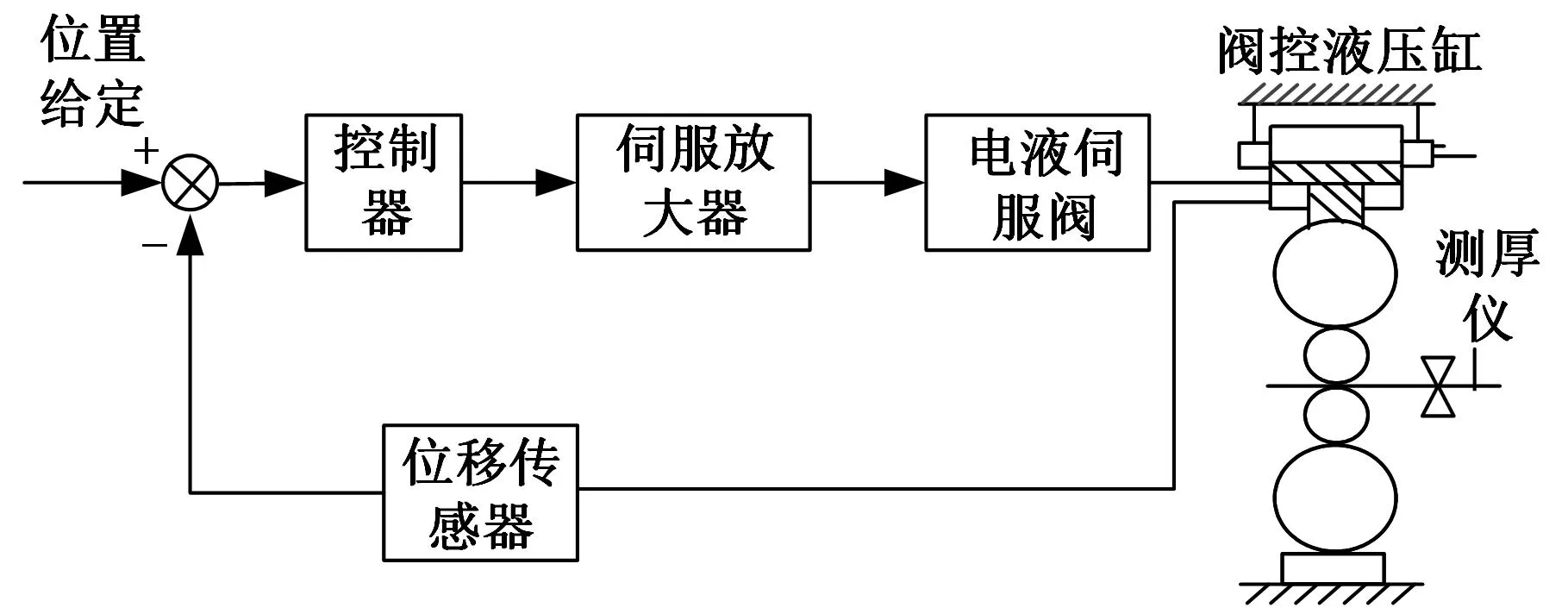
圖1 冷軋液壓APC系統(tǒng)結(jié)構(gòu)圖
冷軋液壓APC系統(tǒng)工作原理為:當(dāng)系統(tǒng)上電,上位機(jī)首先完成各參數(shù)的初始化,之后調(diào)整上下輥,各個傳感器采集現(xiàn)場信號,此時位移傳感器將采集的液壓缸內(nèi)活塞相對缸體的位移信號轉(zhuǎn)化為電壓信號,與給定值作比較,此偏差信號經(jīng)由控制器計算輸出控制量,然后伺服放大器將電壓轉(zhuǎn)化為電流量來調(diào)整伺服閥的開口度,進(jìn)而控制進(jìn)油量來調(diào)節(jié)液壓缸,直到位移偏差為零。
將各部分的傳遞函數(shù)代入框圖,可得冷軋液壓APC系統(tǒng)模型,如圖2所示。其中,βe為有效體積彈性模量,Pa;xp為活塞位移,mm;FL為作用在活塞上的任意外負(fù)載力,N;Kce為總的流量-壓力系數(shù),m3/(Pa·s);V0為活塞在中間位置單個工作腔容積,m3; E為偏差信號;I為伺服閥控制電流;q為液壓流量;ξv為伺服閥阻尼比;ωv為伺服閥固有頻率,rad/s;uf為傳感器輸出電壓,V;ur為輸入的電壓信號,V。
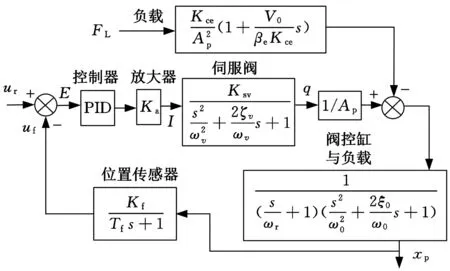
圖2 冷軋液壓APC系統(tǒng)框圖
由圖2可以整理寫出系統(tǒng)開環(huán)傳遞函數(shù)為
G(s)=
(1)
式中,Ka為伺服放大器增益,A/V;Ksv為伺服閥流量增益,m3/(s·A);Ap為液壓缸活塞有效面積,m2;ωr為慣性環(huán)節(jié)的轉(zhuǎn)折頻率,rad/s;ω0為綜合固有頻率,rad/s;ξ0為綜合阻尼比;Kf為傳感器增益,V/m;Ts為傳感器時間常數(shù),s。
這是一個6階系統(tǒng),為了分析方便起見,又因?qū)嶋H系統(tǒng)伺服閥頻響和傳感器頻響均很高,故可近似為比例環(huán)節(jié),式(1)可簡化為
(2)
在實(shí)際工作中,冷軋液壓APC系統(tǒng)隨著運(yùn)行時間的延長,各個參數(shù)會發(fā)生改變,是一個動態(tài)時變的系統(tǒng)。電液伺服閥是按照實(shí)驗(yàn)標(biāo)準(zhǔn)在規(guī)定實(shí)驗(yàn)條件下調(diào)試的,隨著系統(tǒng)的運(yùn)行,當(dāng)工作條件(供油壓力、回油壓力、工作油溫、閥芯磨損狀況等)發(fā)生變化時,閥的零位移會發(fā)生偏移,導(dǎo)致伺服閥的增益發(fā)生變化。同時,液壓缸長時間運(yùn)行后,油液的含氣量、油壓、容器剛度等指標(biāo)的變化會導(dǎo)致有效體積模量變化,最終導(dǎo)致液壓缸的綜合固有頻率發(fā)生變化,阻尼比也會發(fā)生變化,但這些變化一般均在20%范圍內(nèi)。
2基于多領(lǐng)導(dǎo)粒子策略的DMPSO算法
2.1動態(tài)多目標(biāo)優(yōu)化問題概述
對于最小化問題,動態(tài)多目標(biāo)問題[6]一般可以描述為
(3)
式中,x為決策空間X的決策向量;f為目標(biāo)函數(shù)集,是時間t的函數(shù);M為目標(biāo)的個數(shù);g和h為對應(yīng)的不等式和等式約束函數(shù)。
相對于靜態(tài)多目標(biāo)優(yōu)化問題,動態(tài)多目標(biāo)優(yōu)化問題的目標(biāo)函數(shù)以及約束條件不但依賴于決策變量,而且會隨著時間t變化,可能先后出現(xiàn)多個近似Pareto最優(yōu)前沿面,算法要根據(jù)環(huán)境變化求得若干組最優(yōu)解集。最后設(shè)計者根據(jù)偏好信息選擇出每組最優(yōu)解集的最優(yōu)妥協(xié)解。下面給出動態(tài)多目標(biāo)優(yōu)化算法的基本框架,如圖3所示。
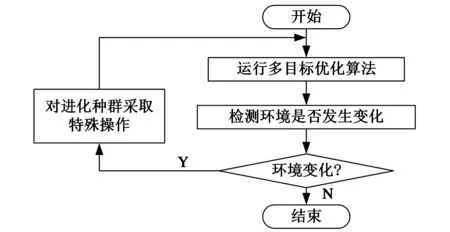
圖3 動態(tài)多目標(biāo)優(yōu)化算法基本框架
2.2基于多領(lǐng)導(dǎo)粒子策略的DMPSO算法
粒子群(PSO)算法[7]可描述如下:設(shè)搜索空間為D維,種群大小為N,外部集大小為A。第i個粒子位置表示為xi=(xi1,xi2,…,xiD);第i個粒子在尋優(yōu)過程中的歷史最優(yōu)位置為Pi=(pi1,pi2,…,piD),設(shè)pgd為所有Pi(i=1,2,…,N)中的最優(yōu)值;第i個粒子的位置變化率(速度)為向量Vi=(vi1,vi2,…,viD)。每個粒子的速度和位置按照如下的公式進(jìn)行更新:
vid(t0+1)=ωvid(t0)+c1rand()(pid(t0)-
xid(t0))+c2rand()(pgd(t0)-xid(t0))
(4)
xid(t0+1)=xid(t0)+vid(t0+1)
(5)
i=1,2,…,N;d=1,2,…,D
式中,vid(t0+1)為下一代粒子的速度;vid(t0)為當(dāng)前代粒子的速度;ω為慣性因子;c1、c2為正常數(shù),稱為加速因子;rand()為[0,1]之間的隨機(jī)數(shù);pid(t0)為個體的歷史最優(yōu)值;pgd(t0)為所有粒子的全局最優(yōu)值;xid(t0+1)為下一代粒子的位置;xid(t0)為當(dāng)前粒子的位置。
對于動態(tài)多目標(biāo)粒子群算法,在環(huán)境發(fā)生變化后,提高算法的收斂速度,盡快達(dá)到新環(huán)境下的近似Pareto前沿,防止陷入局部最優(yōu)是至關(guān)重要的[8]。針對這一問題,本文提出了一種基于多領(lǐng)導(dǎo)粒子策略的DMPSO算法,為提高運(yùn)行速度,一半種群的更新采用多領(lǐng)導(dǎo)粒子策略,另一半種群采用單領(lǐng)導(dǎo)粒子策略,即在外部集中隨機(jī)選擇一個擁擠距離較大的個體作為全局領(lǐng)導(dǎo)粒子。多領(lǐng)導(dǎo)粒子的選擇策略如下:首先,要選擇父代中所有支配當(dāng)前個體的粒子作為領(lǐng)導(dǎo)粒子來指引其向近似前沿面飛行;其次,速度更新公式重新定義如下:
vid(t0+1)=χ[ωvid(t0)+c1rand()(pid(t0)-
(6)
最后,算法通過擁擠距離來保證外部集存檔中的粒子個數(shù)在允許范圍內(nèi),實(shí)現(xiàn)多個領(lǐng)導(dǎo)粒子引導(dǎo)種群向最優(yōu)前沿飛行,提高種群的收斂速度和分布均勻性。
2.3環(huán)境變化檢測機(jī)制
對于動態(tài)多目標(biāo)優(yōu)化問題,能否較快地識別環(huán)境是否發(fā)生變化,并且繼續(xù)有效地追蹤Pareto最優(yōu)前沿,是算法的一個關(guān)鍵問題。隨著時間變化,若待解決問題的決策變量維數(shù)發(fā)生變化,則認(rèn)為問題的環(huán)境發(fā)生了變化,如果問題的維數(shù)沒有發(fā)生變化,則采用一種環(huán)境變化檢測算子[9]來檢測環(huán)境是否發(fā)生變化。從種群中隨機(jī)抽取m0=ξN個個體(ξ為隨機(jī)百分比),生成候選解的集合S={xi,1≤i≤m0},然后重新評估候選解中個體的適應(yīng)值,即在時刻t,采用下式來檢測環(huán)境是否發(fā)生變化:
(7)
其中,m0表示抽取的檢測樣本個數(shù);M表示要求解的動態(tài)多目標(biāo)問題的維數(shù);k為1與t-1之間的正整數(shù);‖·‖表示求歐氏距離,若s(t,k)≥0.005,則認(rèn)為環(huán)境發(fā)生了變化,環(huán)境t和環(huán)境k為非常相似的環(huán)境。
3基于DMPSO算法的冷軋液壓APC系統(tǒng)PID參數(shù)整定
3.1PID參數(shù)整定模型
基于動態(tài)多目標(biāo)粒子群算法的冷軋液壓APC系統(tǒng)PID參數(shù)整定模型[10]如圖4所示。其中,r(k)為系統(tǒng)輸入信號; e(k)為偏差信號; u(k)為控制器輸出;y(k)為系統(tǒng)輸出信號。冷軋液壓APC系統(tǒng)的具體形式如式(2)所示。
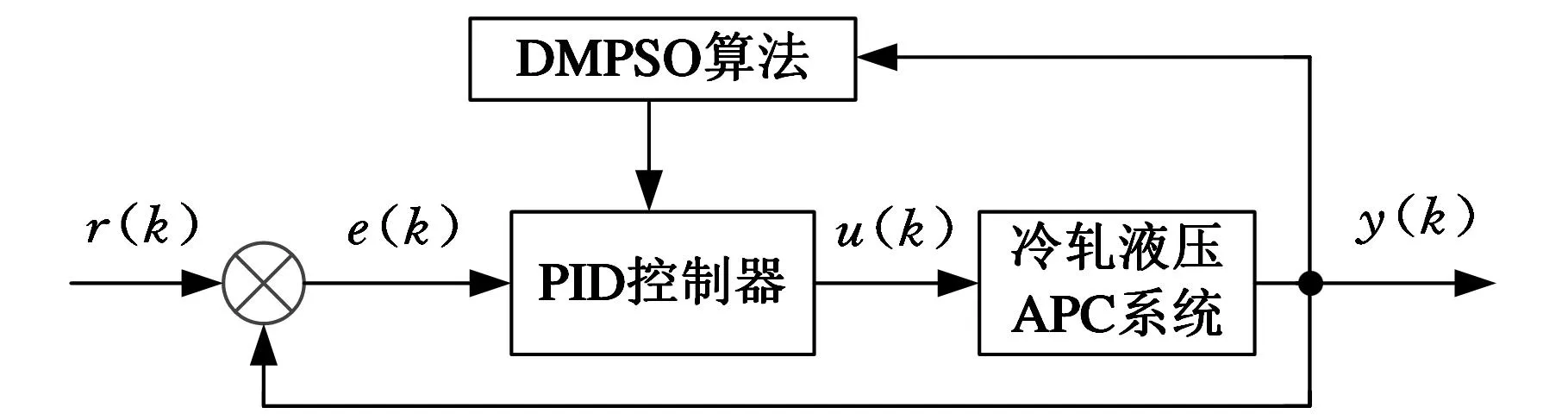
圖4 冷軋液壓APC系統(tǒng)PID參數(shù)整定模型
3.2目標(biāo)函數(shù)的選擇
用來描述系統(tǒng)暫態(tài)響應(yīng)的典型性能指標(biāo)有:最大超調(diào)量、調(diào)整時間、上升時間、峰值時間等。在進(jìn)行PID參數(shù)整定時,由于這幾個目標(biāo)的相互聯(lián)系和相互制約,同時滿足上述參數(shù)是不可能實(shí)現(xiàn)的,要想降低其中的一個指標(biāo),必然要損失其他指標(biāo)。所以本文采用動態(tài)多目標(biāo)優(yōu)化,獲得的近似Pareto前沿反映的是各個目標(biāo)函數(shù)的折中關(guān)系。本文主要針對兩個目標(biāo)函數(shù)進(jìn)行優(yōu)化,一個是調(diào)整時間和時間與絕對誤差乘積積分(ITAE)的加權(quán)J1,另一個是系統(tǒng)超調(diào)和峰值時間的加權(quán)J2。目標(biāo)函數(shù)公式如下:
(8)
式中,ω1、ω2、ω3、ω4為權(quán)重系數(shù),本文中均取0.5;|e(t)|為絕對誤差;ts為調(diào)整時間;MP為系統(tǒng)最大超調(diào)量;tp為峰值時間。
3.3基于DMPSO的APC系統(tǒng)控制流程
圖5所示為基于動態(tài)多目標(biāo)粒子群算法的APC系統(tǒng)控制流程,其中,種群大小為N,外部集大小設(shè)置為A,控制流程終止條件為最大迭代次數(shù)G。
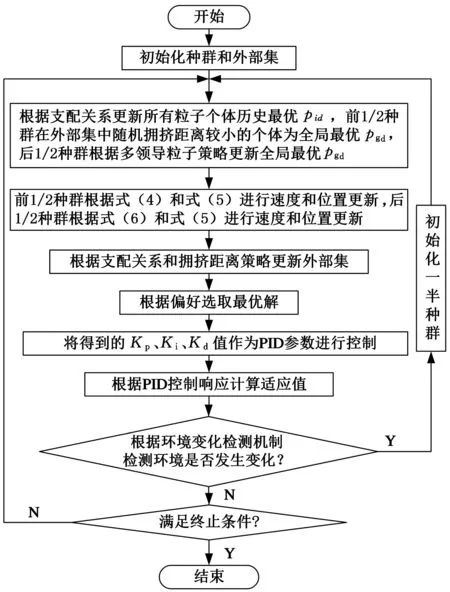
圖5 基于DMPSO的APC系統(tǒng)控制流程
4仿真與結(jié)果
采用動態(tài)多目標(biāo)粒子群算法對冷軋液壓APC系統(tǒng)進(jìn)行PID參數(shù)整定時,初始環(huán)境下系統(tǒng)參數(shù)取值見表1,為了模擬動態(tài)環(huán)境下,算法對PID參數(shù)整定的有效性,假定第二個環(huán)境下伺服閥流量增益Ksv在初始值基礎(chǔ)上增加到0.4161;第三個環(huán)境下綜合固有頻率ω0在初始值的基礎(chǔ)上增加到627;第四個環(huán)境下,綜合阻尼比ξ0在初始值的基礎(chǔ)上減小到0.6。環(huán)境變化頻率為5。
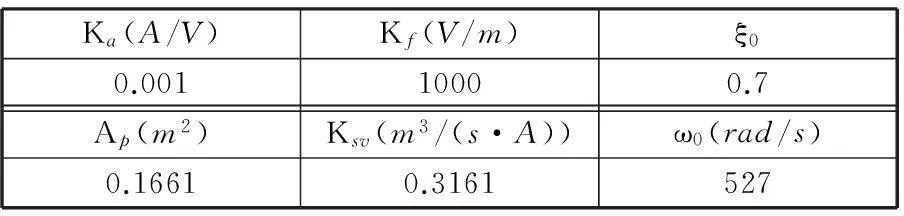
表1 軋機(jī)各參數(shù)取值表
圖6所示為算法運(yùn)行一次,在4種環(huán)境下得到的Pareto最優(yōu)解集在目標(biāo)空間中的分布。由圖6可以看出,在環(huán)境變化頻率為5的情況下,在每個環(huán)境下獲得的近似Pareto最優(yōu)解數(shù)量較多,且分布均勻。說明算法有很好的分布性和較快的收斂速度,以及對環(huán)境變化較強(qiáng)的適應(yīng)能力。
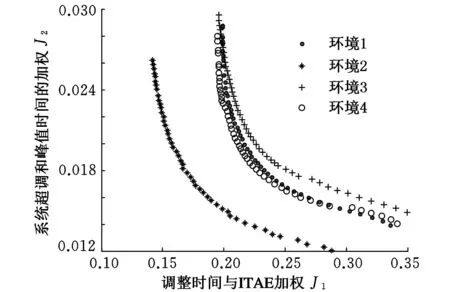
圖6 不同環(huán)境下參數(shù)整定Pareto前沿分布
圖6中4個Pareto前沿反映的是兩個目標(biāo)的折中關(guān)系,若想降低一個指標(biāo),必然要損失另一個指標(biāo),在實(shí)際生產(chǎn)過程中,決策者可根據(jù)近似Pareto前沿,依據(jù)現(xiàn)場需要,選取適當(dāng)?shù)慕狻1疚幕趯蓚€目標(biāo)函數(shù)較折中的偏好,將每個環(huán)境下得到的解集按照橫坐標(biāo)從小到大排序,選取中間的解。得到的4組優(yōu)化后的PID參數(shù)值如表2所示。
表2 不同環(huán)境下PID參數(shù)取值
這4組參數(shù)值隨系統(tǒng)參數(shù)變化的單位階躍響應(yīng)輸出曲線如圖7所示。
(a)環(huán)境1(b)環(huán)境2
(c)環(huán)境3(d)環(huán)境4圖7 不同環(huán)境下單位階躍響應(yīng)輸出曲線
從圖7中可以看到,在4種環(huán)境下,得到的單位階躍響應(yīng)曲線調(diào)整時間短、超調(diào)量小,由于環(huán)境變化頻率為5,所以算法對新環(huán)境的自適應(yīng)能力強(qiáng),能很快找到新環(huán)境下的近似Pareto前沿,當(dāng)系統(tǒng)隨著時間的運(yùn)行,參數(shù)發(fā)生變化時,對控制系統(tǒng)的PID參數(shù)進(jìn)行自適應(yīng)整定,有效彌補(bǔ)了傳統(tǒng)PID控制的缺陷。下面將初始環(huán)境即環(huán)境1下選取的PID參數(shù)同基于神經(jīng)網(wǎng)絡(luò)的參數(shù)整定方法和基于模糊控制的參數(shù)整定方法得到的PID參數(shù)進(jìn)行對比,如圖8所示。三種算法的優(yōu)化后系統(tǒng)的暫態(tài)響應(yīng)性能指標(biāo)如表3所示。
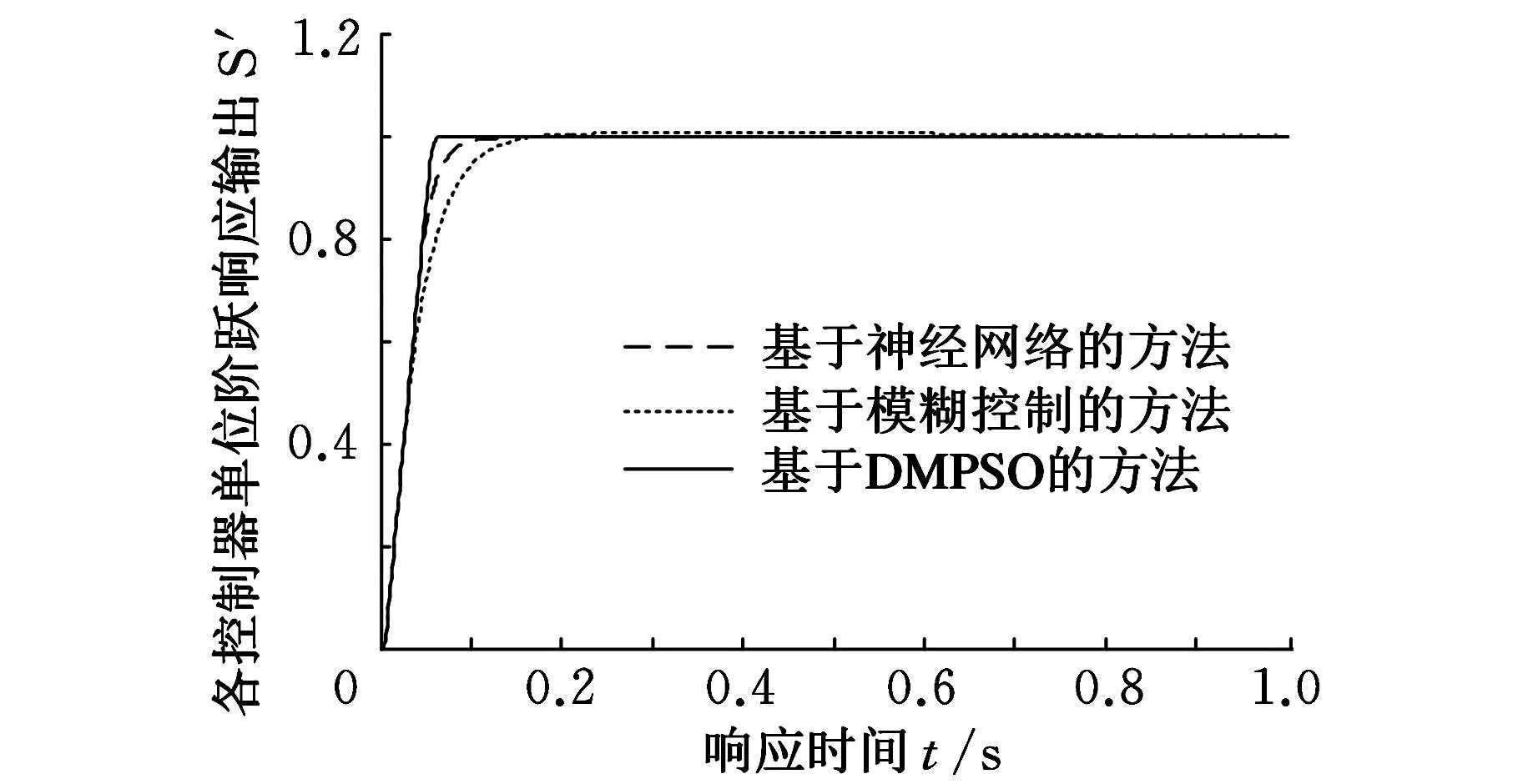
圖8 各控制器單位階躍響應(yīng)輸出曲線
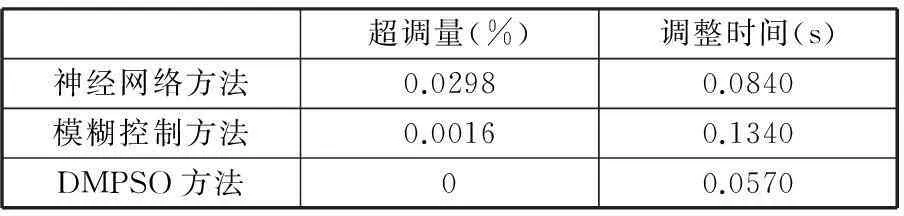
超調(diào)量(%)調(diào)整時間(s)神經(jīng)網(wǎng)絡(luò)方法0.02980.0840模糊控制方法0.00160.1340DMPSO方法00.0570
從圖8和表3中可以看出,本文采用的基于多領(lǐng)導(dǎo)粒子策略的動態(tài)多目標(biāo)粒子群優(yōu)化整定方法,相比于其他兩種方法,無超調(diào)、調(diào)整時間更短、響應(yīng)速度更快。
5結(jié)束語
首先,本文針對動態(tài)多目標(biāo)粒子群算法存在的收斂速度慢、容易陷入局部最優(yōu)的缺陷,提出了一種基于多領(lǐng)導(dǎo)粒子策略的改進(jìn)算法,有效提高了算法的收斂速度和分布均勻性,并采用環(huán)境變化檢測算子,提高了算法對環(huán)境變化的適應(yīng)能力。其次,將算法應(yīng)用于冷軋液壓APC系統(tǒng)的PID參數(shù)整定,不僅能夠?qū)ο到y(tǒng)參數(shù)隨時間的變化進(jìn)行自適應(yīng)整定,還避免了超調(diào),調(diào)整時間從神經(jīng)網(wǎng)絡(luò)方法的0.0840縮短為0.0570,降低了32%,使系統(tǒng)性能得到了很好的改善。
參考文獻(xiàn):
[1]魏立新,林鵬,車海軍.差分-模糊復(fù)合算法在冷軋APC系統(tǒng)的實(shí)驗(yàn)[J].塑性工程學(xué)報,2015,22(2):121-126.
Wei Lixin,Lin Peng,Che Haijun.Experimental Study on DE-fuzzy Hybrid Algorithm in APC System[J].Journal of Plasticity Engineering,2015,22(2):121-126.
[2]任新意,杜鳳山,黃華貴,等.基于灰色預(yù)測的模糊免疫PID控制器在板厚控制系統(tǒng)中的應(yīng)用[J].鋼鐵,2010,45(11):62-67.
Ren Xinyi,Du Fengshan,Huang Huagui,et al.Application of Fuzzy Immune PID Controller Based on Gray Prediction in Gauge Control System[J]. Iron and Steel,2010,45(11):62-67.
[3]楊景明,劉宇明,徐雅潔,等.神經(jīng)網(wǎng)絡(luò)自適應(yīng)控制在冷軋機(jī)AGC系統(tǒng)中的應(yīng)用[J].冶金設(shè)備,2009,4(2):14-17.
Yang Jingming,Liu Mingyu,Xu Yajie,et al.Application of Nural Network Adaptive Control to the AGC System in Cold Rolling Mill[J].Metallurgical Equipment,2009,4(2):14-17.
[4]王希娟,馮景曉,韋煒.預(yù)測控制在軋機(jī)液壓AGC 系統(tǒng)中的應(yīng)用研究[J].重型機(jī)械,2007(4):16-19.
Wang Xijuan,F(xiàn)eng Jingxiao,Wei Wei.Application Research of Prediction Control in Mill Hydraulic AGC System[J].Heavy Machinery,2007(4):16-19.
[5]連家創(chuàng),劉宏民.板厚板型控制[M].北京:兵器工業(yè)出版社,1996.
[6]Farina M,Deb K,Amato P.Dynamic Multi-objective Optimization Problems:Test Cases,Approximations,and Applications[J].IEEE Transactions on Evolutionary Computation,2004,8(5):425-442.
[7]Xue B,Zhang M,Browne W N.Particle Swarm Optimization for Feature Selection in Classification: a Multi-objective Approach[J].IEEE Transactions on Cybernetics,2013, 43(6):1656-1671.
[8]Goh C K,Chen T K.A Competitive-cooperative Coevolutionary Paradigm for Dynamic Multi-objective Optimization[J]. Evolutionary Computation,IEEE Transactions on Evolutionary Computation.2009,13(1):103-127.
[9]張世文,李志勇,陳少淼,等.基于生態(tài)策略的動態(tài)多目標(biāo)優(yōu)化算法[J].計算機(jī)研究與發(fā)展,2014,51(6):1313-1330.
Zhang Shiwen,Li Zhiyong,Chen Shaomiao,et al.Dynamic Multi-objective Optimization Algorithm Based on Ecological Strategy[J].Journal of Computer Research and Development,2014,51(6):1313-1330.
[10]高峰,王媛,李艷,等.固著磨料雙面研磨壓力模糊自整定PID控制方法研究[J].中國機(jī)械工程,2015,26(2):162-166.
Gao Feng,Wang Yuan,Li Yan,et al.Study on Fuzzy Self-tuning PID Parameters Control Method of Double-side Plane Lapping Force with Solid Abrasive Materials[J].China Mechanical Engineering,2015,26(2):162-166.
(編輯袁興玲)
Applications of Multiple Leaders DMPSO in Hydraulic APC System of Cold Strip Mill
Wei LixinWang LipingXu DeshuLin PengYang Jingming
Key Lab. of Industrial Computer Control Engineering of Hebei Province,
Yanshan University,Qinhuangdao,Hebei,066004
Abstract:According to the characteristics that the parameters of cold rolling hydraulic APC system changed over time, which was a dynamic system. This paper proposed a strategy for PID controller parameters setting based on improved DMPSO algorithm. This strategy might set and optimize PID controller parameters in real time through the ability of dynamic multi-objective particle swarm optimization algorithm that adapted environment changes and optimized. Meanwhile, to avoid falling into local optimum and slow convergence speed, a DMPSO was put forward based on multiple leaders in guiding the particles search.Simulation results show that the control system with fast track, small overshoot and strong adaptability is better than the traditional PID control.
Key words:multiple leader;dynamic multi-objective particle swarm optimization(DMPSO);automatic position control(APC) system;PID controller
基金項(xiàng)目:國家自然科學(xué)基金鋼鐵聯(lián)合基金資助項(xiàng)目(U1260203);河北省高等學(xué)校創(chuàng)新團(tuán)隊(duì)領(lǐng)軍人才培育計劃資助項(xiàng)目(LJRC013);國家自然科學(xué)基金資助項(xiàng)目(61074099)
收稿日期:2015-03-31
中圖分類號:TG335.13DOI:10.3969/j.issn.1004-132X.2015.23.001
作者簡介:魏立新,男,1977年生。燕山大學(xué)電氣工程學(xué)院副教授。研究方向?yàn)橐苯鹁C合自動化與智能控制等。發(fā)表論文50余篇。王利平,女,1989年生。燕山大學(xué)電氣工程學(xué)院碩士研究生。徐德樹,女,1989年生。燕山大學(xué)電氣工程學(xué)院碩士研究生。林鵬,男,1988年生。燕山大學(xué)電氣工程學(xué)院碩士研究生。楊景明,男,1957年生。燕山大學(xué)電氣工程學(xué)院教授、博士研究生導(dǎo)師。
