一種基于自抗擾控制技術的艦載雷達兩軸穩定轉臺伺服系統
2016-01-23 18:53:32孫晉先中國船舶重工集團公司第七二四研究所南京211153
雷達與對抗 2015年2期
張 杰,孫晉先,劉 麗(中國船舶重工集團公司第七二四研究所,南京211153)
?
一種基于自抗擾控制技術的艦載雷達兩軸穩定轉臺伺服系統
張杰,孫晉先,劉麗
(中國船舶重工集團公司第七二四研究所,南京211153)
摘要:針對艦載雷達兩軸穩定轉臺的特點,設計了以浮點型DSP為核心的控制模塊,采用自抗擾控制技術實現了艦載雷達轉臺方位-俯仰兩軸穩定控制。
關鍵詞:艦載雷達;伺服系統;自抗擾控制; DSP
0 引言
伺服控制系統是現代艦載雷達的重要組成部分,其控制精度、響應速度、可靠性及穩定性已成為雷達系統的關鍵性能指標。近年來,艦載雷達探測性能不斷提高,對雷達天線轉臺的控制性能提出了更高的要求。為了彌補傳統的PID控制算法在抗干擾方面的不足,進一步提高伺服系統的跟蹤性能,本文基于自抗擾控制技術設計了一種以浮點型DSP為核心的控制系統,采用坐標變換技術實時補償艦船搖擺姿態,完成艦載雷達方位-俯仰兩軸穩定控制。
1 系統基本組成及工作原理
在方位-俯仰型兩軸穩定艦載雷達天線轉臺中,方位軸與俯仰軸正交,伺服系統接收慣性導航系統的航向、縱搖及橫搖信號,按指定的要求實現方位和俯仰兩軸運動,保證雷達天線方位軸指向穩定及俯仰軸保持水平。伺服系統基本組成如圖1所示。整個系統主要由方位控制和俯仰控制兩部分組成。這兩部分的組成基本相同,主要由控制模塊、執行機構和反饋回路組成。控制模塊以TMS320C6747芯片為核心,其主要功能是接收外部操控信號、姿態角信號、對反饋信號進行模數轉換及編碼、坐標變換、控制運算、數據編碼等。執行機構由高性能數字伺服電機驅動器、伺服電機和減速機組成。反饋回路由消隙小模數齒輪組、測角電機和軸角編碼器組成。

圖1 艦艦載雷達轉臺兩軸穩定伺服系統基本組成
2 控制模塊的設計
由于兩軸穩定系統的坐標變換涉及大量的三角函數運算,故控制模塊采用浮點型DSP芯片TMS320C6747作為處理器。姿態角信號以及其他外部信號進入FPGA進行編碼及電平轉換。DSP讀取這些信號并對其進行控制解算,將解算后的方位、俯仰控制量經雙路AD轉換器AD5547轉換為數字量分別傳送至方位、俯仰驅動器,驅動方位、俯仰電機運動。同時,還將接收到的姿態角信號以及伺服系統狀態、故障信號進行編碼并通過以太網模塊發送到顯控臺。控制模塊組成如圖2所示。

圖2 控制模塊組成
3 兩軸穩定閉環控制
經典PID控制廣泛應用于艦載雷達伺服系統中,其控制結構簡單,但存在以下幾個方面的缺點:對控制增益的變化太敏感;“快速性”和“超調”不可調和;微分器很難選取;誤差積分常會使閉環的動態性能變差等。針對以上缺點,本文采用的自抗擾控制器逐一給出了解決辦法。所設計的自抗擾控制器分為3個部分:跟蹤微分器(TD)、擴張狀態觀測器(ESO)和非線性狀態誤差反饋控制器(NLSEF)。自抗擾控制器控制結構如圖3所示。
伺服系統可簡化為如下二階系統:

其中,x1、x2為系統狀態變量,u為系統控制量,P為未知擾動。
TD數學表達式為[7]

其中,v為系統輸入指令,v1為過渡過程的輸出,v2為得到的微分,γ為調節參數,其值越大響應越快。

圖3 自抗擾控制器的控制結構
ESO數學表達式為[7-8]

式中,z1、z3、z3為對x1、x2、P的估計,β1,β2,β3,b0均為可調參數,且滿足β1>0、β2>0、β3>0、β1·β2>β3。
NLSEF數學表達式為[7-8]

其中k1>0、k2>0為可調參數。
艦載雷達轉臺兩軸穩定伺服系統一般采用坐標變換技術在雷達天線方位和俯仰軸上對艦船搖擺姿態角(縱搖角P、橫搖角R和航向角H)進行角度實時補償,從而確保雷達天線指向穩定,在艦船地理坐標系中其方位角A和俯仰角E計算公式如下[4]:
式中,Ac為天線甲板方位角,E為天線俯仰角,A為天線真方位,Ec為天線甲板俯仰角; H為艦船航向角,R為艦船橫搖角,P為艦船縱搖角。
3.1方位閉環控制
方位閉環控制原理示意圖如圖4所示。方位給定值與方位反饋值經過自抗擾控制器處理,其控制輸出經D/A轉換后送至方位驅動器,驅動天線方位按指定要求運動。其中,方位電機參數:電阻Ra=2.48 Ω,電感La=38 mH,轉矩系數Km=0.848 N·m/A,反電勢系數Ke= 0.489 V/rad·s-1,電機轉動慣量Jm= 0.00114 kg·m2;方位轉臺參數:速比n = 309,負載轉動慣量Jl=150 kg·m2。天線方位以30°/s的速度順時針旋轉,方位位置給定、位置反饋及控制誤差如圖5(圖中給定sp和反饋信號y以右邊界為坐標,誤差信號e以左邊界為坐標)所示,可見天線方位控制誤差收斂迅速并趨于穩定。

圖4 方位閉環控制原理示意圖
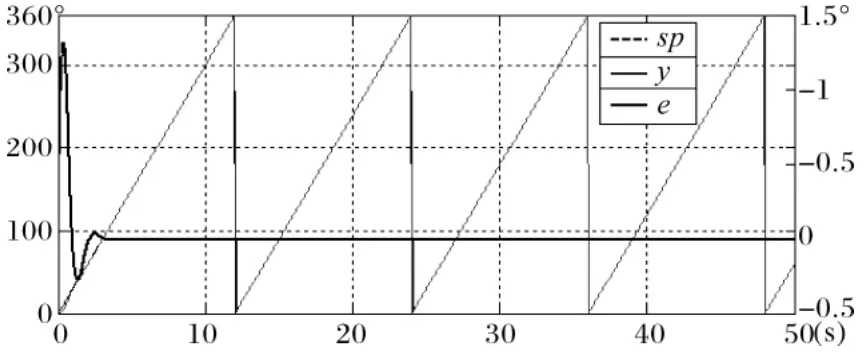
圖5 方位轉臺閉環控制
3.2俯仰閉環控制
俯仰閉環控制原理示意圖如圖6所示。俯仰給定值與俯仰反饋值經過自抗擾控制器處理,其控制輸出經D/A轉換后送至俯仰驅動器,驅動天線俯仰實時與大地保持水平。其中,俯仰電機參數:電阻Ra= 2.48Ω,電感La=38 mH,轉矩系數Km=0.848 N·m/A,反電勢系數Ke=0.489 V/rad·s-1,電機轉動慣量Jm= 0.00114 kg·m2;俯仰轉臺參數:速比n =405.7,負載轉動慣量Jl=170 kg·m2。艦船橫搖信號:幅值20°,周期9.5 s;艦船縱搖信號5°,周期5 s。俯仰控制位置給定、位置反饋及控制誤差如圖7(圖中給定sp和反饋信號y以右邊界為坐標,誤差信號e以左邊界為坐標)所示,可見天線俯仰控制誤差同樣收斂迅速并趨于穩定。

圖6 俯仰閉環控制原理示意圖

圖7 俯仰轉臺閉環控制
4 結束語
本文從工程應用角度出發設計了以浮點型DSP為核心的艦載雷達兩軸穩定伺服系統,具體描述了控制系統的組成和實現方法,并給出了方位和俯仰兩軸穩定的控制策略以及控制效果。該伺服系統可靠性高、穩定性好、調試方便,為后續艦載雷達轉臺伺服系統的設計提供了一定的借鑒價值。
參考文獻:
[1]TMS320C6745/6747 Floating-point Digital Signal Processor.TEXAS INSTRUMENTS,2008.
[2]Using the TMS320C6748/C6746/C6742 Bootloader.TEXAS INSTRUMENTS,2014.
[3]Powering the TMS320C6747 with the TPS650061.TEXAS INSTRUMENTS,2011.
[4]曹正才.艦載雷達常用穩定方式坐標變換[J].雷達與對抗,2010(1).
[5]曹正才,金艷艷.艦載雷達伺服系統的復合控制[J].雷達與對抗,2004(1).
[6]劉金琨.先進PID控制MATLAB仿真[M].北京:電子工業出版社,2006.
[7]張秀峰.MATLAB機電控制系統技術與應用[M].北京:清華大學出版社,2011.
[8]Y X Su,B Y Duan,C H Zheng,Y F Zhang,G D Chen,J W Mi.Disturbance-Rejection High-Precision MotionControl of a Stewart Platform[J].IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY,2004(1):364-374.
A biaxial stabilizing servo system based on ADRC technology for shipborne radars
ZHANG Jie,SUN Jin-xian,LIU Li
(No.724 Research Institute of CSIC,Nanjing 211153)
Abstract:Based on the characteristics of the biaxial stabilizing rotary platform for the shipborne radar,the control module is designed with the floating-point DSP as its core,realizing the stability control of the azimuth and elevation axes of the shipborne radar through the active disturbance rejection control(ADRC)technology.
Keywords:shipborne radar; servo system; ADRC; DSP
作者簡介:張杰(1982-),男,工程師,碩士,研究方向:控制理論與控制工程;孫晉先(1983-),女,工程師,研究方向:自動化控制;劉麗(1988-),女,工程師,研究方向:控制科學與控制工程。
收稿日期:2015-03-02;修回日期:2015-03-28
文章編號:1009-0401(2015)02-0052-04
文獻標志碼:A
中圖分類號:TN959.72