雷達載車調平支腿機械設計
2016-01-23 18:53:28王宏杰中國船舶重工集團公司第七二四研究所南京211153
雷達與對抗 2015年2期
關鍵詞:機械設計
王宏杰(中國船舶重工集團公司第七二四研究所,南京211153)
?
雷達載車調平支腿機械設計
王宏杰
(中國船舶重工集團公司第七二四研究所,南京211153)
摘要:機動雷達一般是通過自動調平系統實現雷達載車自動調平的。隨著機動雷達的廣泛應用,作為雷達載車自動調平系統的重要組成部分,調平支腿設計的成功與否會直接或間接地影響到雷達整機的工作性能。本文介紹了一種機電式自動調平系統的調平支腿的機械設計,其機械部分具有結構緊湊、可靠性高、維護簡單等特點。
關鍵詞:機動雷達;自動調平系統;調平支腿;機械設計
0 引言
從20世紀90年代開始,隨著現代戰爭對雷達技術的需求被重新認識,快速反應和高機動進退功能成為對雷達較為迫切的需求,地面雷達高機動技術得到雷達應用和研究領域的廣泛重視[1]。機動雷達一般是通過自動調平系統實現雷達載車自動調平的。雷達自動調平系統是雷達的一個重要組成部分,對提高雷達的測量性能,如目標角度的測量精度以及天線架設、撤收的速度等,起著決定性的作用[2]。
作為雷達載車自動調平系統的重要組成部分,調平支腿的設計涉及到機械、伺服等研究領域,其設計成功與否會直接或間接影響到雷達整機的工作性能。
本文介紹了一種機電式自動調平系統的調平支腿的機械設計,其機械部分具有結構緊湊、可靠性高、維護簡單等特點。該支腿已經在機動雷達產品上成熟應用。
1 調平支腿的機械設計
調平支腿一般對稱布置在雷達載車兩側,通過支腿的上下收縮,實現雷達載車的調平。調平支腿在設計時需要考慮調平系統的調平精度要求、調平時間要求、調平支腿的額定行程、最大承載能力,同時還需要綜合考慮車輛底盤的空間分配情況,以及支腿與車輛底盤的安裝接口型式等。調平支腿主要承受重載的垂直載荷,而且載車上裝的雷達設備價值很高,因而在調平支腿的機械設計過程中必須經過嚴格的載荷計算、剛強度校核,充分考慮在調平過程中會出現的極端情況,確保萬無一失。
圖1為調平支腿結構簡圖。調平支腿主要包括減速電機、自制減速箱和撐腿等部分,采用普通的梯形絲桿+兩級齒輪減速箱+行星減速機+驅動電機的傳動型式。

圖1 調平支腿結構簡圖
在調平支腿的機械設計過程中,首先應根據載車底盤的空間分配情況初步確定支腿的結構形式及行程,對其重量進行預估,目的就是充分利用底盤空間實現雷達載車負荷的合理分配,加裝調平支腿后不會影響載車的機動性能;其次,按照調平支腿的設計承載要求,初定梯形絲桿副的直徑和導程等參數;再次,依據自動調平系統的調平精度和調平時間要求,與伺服設計人員協商確定減速電機的主要性能參數,并初步確定減速電機型號和齒輪減速箱的傳動比;最終,在調平支腿初步設計的基礎上進行逐步優化,通過試驗驗證形成最終設計。
1.1減速電機
減速電機根據負載運動要求選用標準產品,提供足夠的力矩和功率,使負載達到要求的運動性能。此外,電機需要能夠快速正反轉,能快速起停;有寬的調速范圍,便于電機在極低速狀態下進行轉速平穩的精調平,避開諧振頻率。
為便于結構的總體布置,還要求減速電機本身體積盡可能小,質量輕。
1.2齒輪減速箱
考慮到減速電機的速比、輸出力矩還不能直接滿足調平支腿的負載驅動要求,因此配置了一個齒輪減速箱,用于減速電機和撐腿絲杠副的連接,以調整傳動比。齒輪減速箱由箱體、箱蓋和若干個錐齒輪、齒輪、軸及軸承組成,其結構簡圖如圖2所示。為便于使用,齒輪減速箱上還設計了手動搖柄接口,提供手動調平、撤收的功能。

圖2 齒輪減速箱的結構簡圖
錐齒輪1和減速電機輸出端的錐齒輪嚙合,實現動力輸入。錐齒輪2與撐腿上的錐齒輪嚙合,實現動力輸出。軸1和軸2通過滑鍵連接。將軸2向外拉出后,軸2和軸1之間不再傳遞扭矩和運動,即減速電機和齒輪減速箱之間不能夠傳遞扭矩和運動,此時可以使用搖柄手動搖動軸2實現撐腿的上下運動,使調平支腿具備手動功能。
1.3撐腿
撐腿主要包括外殼、套筒、梯形絲杠副等結構,結構簡圖如圖3所示。撐腿通過外殼與載車底盤連接。
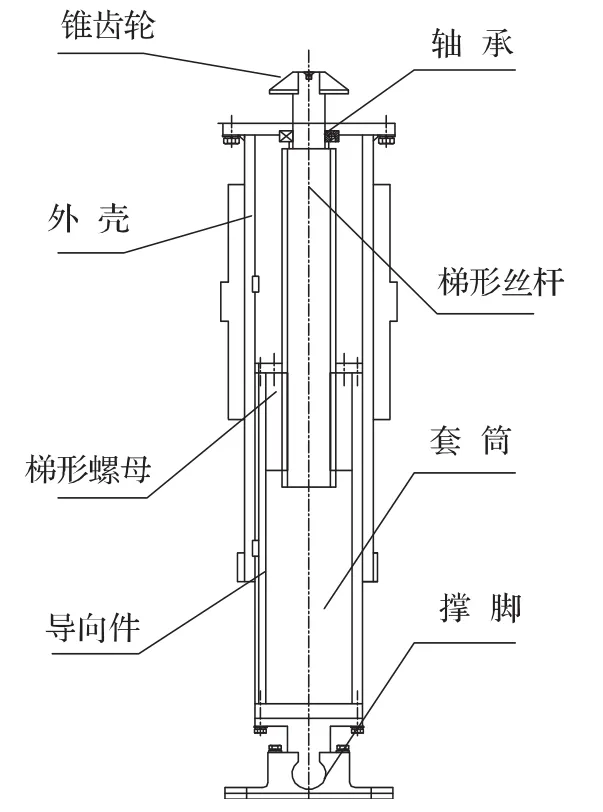
圖3 撐腿結構簡圖
撐腿工作時,齒輪減速箱上的錐齒輪與撐腿上部的錐齒輪嚙合,帶動梯形絲桿旋轉,與梯形螺母固聯的套筒沿著固定在外殼上的導向件在額定行程內上下運動,實現支撐的功能。梯形絲杠副直徑和導程等參數根據調平支腿最大承載能力及行程、運動速度等要求綜合計算確定。撐腳處的球頭可以有效地改善撐腿的受力狀況。
為了保證雷達設備的絕對安全,必須依據精確計算的調平支腿載荷,按照設計手冊選用合適的梯形絲杠副,并進行剛強度校核及失穩計算[3]。
2 其他關注事項
調平支腿是雷達載車的一部分。在設計過程中必須依據雷達載車的總體布局、綜合考慮車輛底盤的空間分配情況進行一體化設計,使得加裝的調平支腿與雷達載車有機結合在一起,避免出現重復設計、結構重復的現象。
此外,在進行調平支腿的機械設計時,還需要控制整個傳動鏈的回差及轉動慣量,使得調平支腿具備運動剛性好、傳動靈敏的特點,以滿足調平系統對調平支腿的響應速度快、隨動精度高等要求。
3 結束語
調平支腿的機械設計在工程已經得到成熟應用。但是,具體到不同型號的機動雷達,選用載車底盤有很大差異,上裝設備及布局也有很大的不同,結合不同型號機動雷達的具體要求,設計出不同的調平支腿,使得雷達整車成為一個有機體具有非常重要的意義。
參考文獻:
[1]平麗浩,等.雷達結構與工藝[M].北京:電子工業出版社,2007:209-219.
[2]李小波,孫志勇.雷達天線自動調平系統的設計與實現[J].現代雷達,2006(7).
[3]成大先,等.機械設計手冊(單行本)//機械傳動[M].北京:化學工業出版社,2004: 11-4~11-14.
A mechanical design of leveling jacks of vehicular radars
WANG Hong-jie
(No.724 Research Institute of CSIC,Nanjing 211153)
Abstract:Auto leveling system is usually used to automatically level the maneuvering radar.With widely used maneuvering radars,the leveling jack,as an important part of the auto leveling system,can directly or indirectly affect the working performance of the overall radar.A mechanical design of the electromechanical auto leveling jack is introduced,and the mechanical parts feature structural compact,high reliability and simple maintenance.
Keywords:maneuvering radar; auto leveling system; leveling jack; mechanical design
作者簡介:王宏杰(1974-),男,高級工程師,碩士,研究方向:雷達結構設計。
收稿日期:2015-01-12;修回日期:2015-01-20
文章編號:1009-0401(2015)02-0049-03
文獻標志碼:A
中圖分類號:TN957.8
猜你喜歡
機械工業標準化與質量(2023年6期)2023-09-26 06:43:34
建材發展導向(2021年18期)2021-11-05 09:19:30
活力(2021年4期)2021-07-28 05:35:10
湖北農機化(2020年4期)2020-07-24 09:07:20
湖北農機化(2020年4期)2020-07-24 09:07:16
湖北農機化(2020年4期)2020-07-24 09:07:12
湖北農機化(2020年4期)2020-07-24 09:07:12
建材發展導向(2019年10期)2019-08-24 06:25:34
電子制作(2018年8期)2018-06-26 06:43:40
山東工業技術(2016年15期)2016-12-01 05:31:51