全自動立式顆粒包裝機傳動系統及橫封機構的改進與仿真
2015-12-31 12:06:10劉海生解邦銀
食品與機械 2015年4期
劉海生 張 俊 李 菡 解邦銀
(1.湖北文理學院機械與汽車工程學院,湖北 襄陽 441053;2.汽車零部件制造裝備數字化湖北省協同創新中心,湖北 襄陽 441053;3.湖北襄陽逸順機電科技有限公司,湖北 襄陽 441000)
高精度小包裝物品因其包裝精巧和攜帶方便,廣泛應用于食鹽、味精、雞精、白糖、預混料、添加劑、種子等顆粒狀的定量包裝。目前,國內外大多數包裝機械存在著一些明顯的缺陷,主要是在立式包裝機中存在包裝袋錯邊起皺、包裝袋封口外形不正等問題,這主要是橫封瞬時速度與縱封速度不相同、剪斷滾刀的線速度與料袋下降速度不匹配引起的[1]。肖蓉川[2]運用數學計算方法確定偏心鏈輪參數,其過程復雜又不直觀;韓炬等[3]應用 Matlab編寫程序和Creo Parametric軟件對熱封機構進行了建模及動力學分析,但未對熱封機構的參數進行確定和優化,且現有研究均限于局部機構。為此,本研究擬借助SolidWorks三維軟件對全自動立式包裝機整機實現參數化設計、三維建模和運動分析,以提高設計質量和性能、縮短設計周期。
1 全自動包裝機的組成及存在的問題
1.1 全自動包裝機的組成
袋裝全自動包裝機是集制袋、計量、充填、封裝、剪切、稱重等功能為一體的包裝設備。由于生產批量較大,常選用多工位、連續型運動形式,以提高包裝效率,本機采用立式直線型工藝要求路線[1,4],它由供料系統1、供膜裝置2、縱封機構3、橫封機構4、剪切機構5、稱重分揀裝置6、傳動系統7、機架及控制系統組成,見圖1。
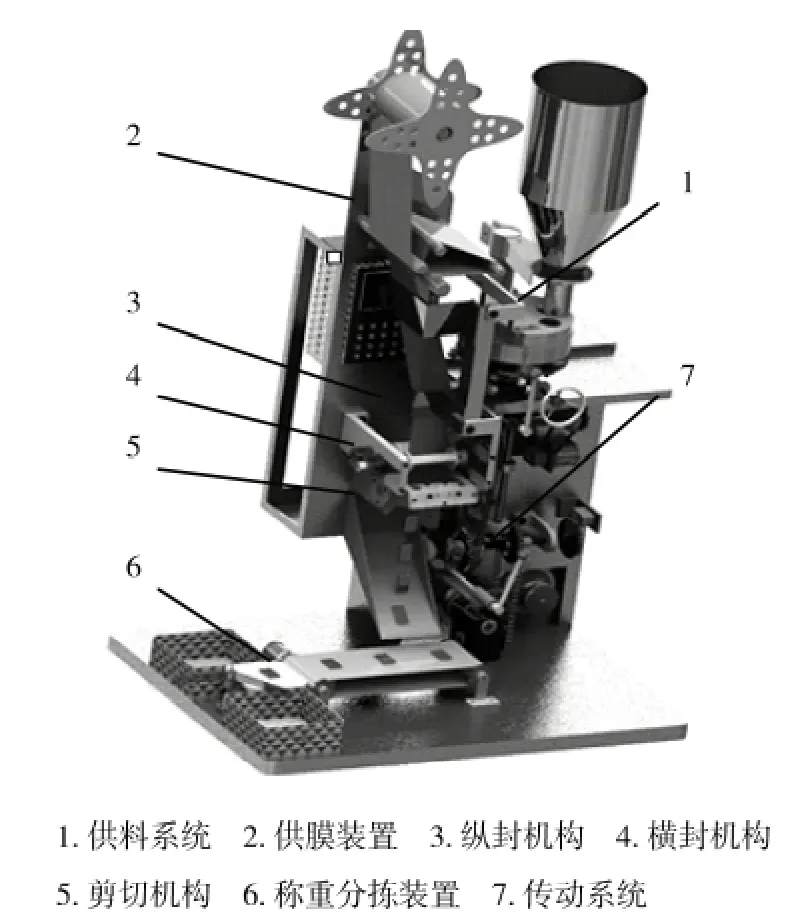
圖1 包裝機的組成Figure 1 The structure of pockaging machine
工作時,供料系統1采用六工位旋轉運動將被包裝物料填充到可調式量杯中進行計量,并定時充填到由供膜裝置2形成的漏斗狀袋筒內;然后縱封機構3通過一對做等速相向回轉的輥輪,對袋筒加熱封邊及牽引運動,橫封機構4帶動一對熱封頭實現袋筒封口,同時保證熱封瞬時熱封頭與連續運動著的袋筒具有相同的線速度;最后由剪切機構5驅動旋轉式輥刀將包裝袋切斷,并通過稱重分揀裝置6對成品袋進行自動稱重和分揀歸類。傳動系統7將電動機的動力分配給各執行機構,并協調各機構動作一致。
1.2 原設備存在的問題及改進措施
(1)原設備常常存在包裝袋錯邊起皺、包裝袋封口外形不正、商標圖案錯位的問題,這是由于原設備各執行機構的動力是由一根動力軸分配的,縱封機構經過行星差動輪系、圓錐帶式變速器、齒輪機構來實現初始位置修正、調速和換向的,其調節不易控制,從而導致縱封輥輪的牽引速度與橫封封頭瞬時運動速度不匹配所致。針對此問題,改進措施是:將縱封機構從傳動系統中獨立出來,由單獨的步進電機控制,其速度大小由機械控制轉化為PLC控制,不僅可避免各執行機構間的強耦合,便于協調和控制各執行構件的速度一致或匹配,又能簡化傳動鏈,降低設計和制造成本。
(2)不同長度的包裝袋要求有不同的包裝袋下降速度,就必須能夠改變橫封輥輪的轉速與之匹配,原設備采用更換不同直徑的從動鏈輪的方式來調節橫封輥輪的轉速,由于鏈輪直徑是離散的幾個固定值,所以包裝袋的長度規格就不連續可調,且更換鏈輪較麻煩。為了適應包裝袋長度在一定范圍內任意可調,改進措施是將橫封機構傳動鏈上的主鏈輪改為偏心鏈輪,通過調整鏈輪的偏心距來調節橫封機構的封合瞬時速度,使之與包裝袋下降速度匹配,保證包裝機各機構協調運動。
2 傳動系統的改進
改進后的傳動系統方案的運動簡圖如圖2所示,電動機通過皮帶輪D1/D2帶動減速器,減速器通過鏈條Z1/Z2帶動動力分配軸Ⅰ旋轉,并將動力分配給三路。第1路動力傳給供料系統,通過錐齒輪Z3/Z4嚙合帶動傳動軸Ⅱ旋轉,再通過齒輪Z5/Z6、Z7/Z8嚙合帶動供料盤軸IV旋轉,使供料系統以傳動比i=1/6運行,軸Ⅳ上的離合器用于包裝機調試時使用,以避免供料;第2路動力傳給橫封機構,通過偏心鏈輪Z9/Z10和齒輪組Z11/Z12、Z13/Z14、Z15/Z16帶動橫封軸Ⅶ、Ⅷ反向變速旋轉,傳動比i=1/2,橫封輥輪每轉180°封口一次;第3路動力傳給剪切機構,通過齒輪Z17/Z18、Z18/Z19嚙合帶動切斷軸Ⅹ上的刀片旋轉,實現剪切運動,其傳動比i=1,實現一袋一切斷,當軸Ⅰ上離合器斷開時不切斷包裝袋。
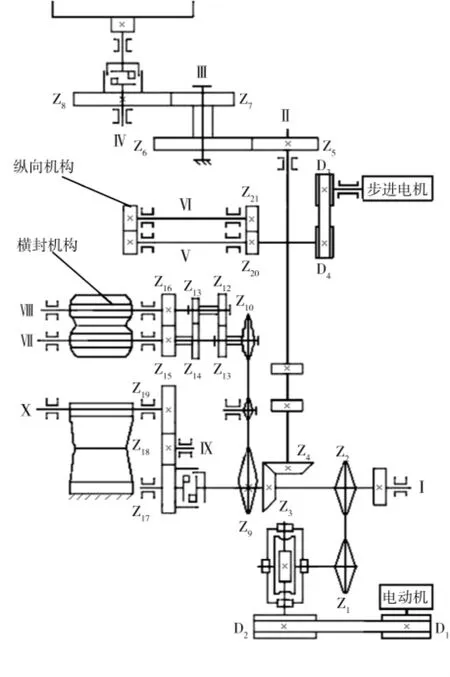
圖2 傳動系統示意圖Figure 2 Transmission system
縱向機構的動力不再取自動力分配軸Ⅰ,而是設立單獨的步進電機驅動,通過同步齒型帶D3/D4、齒輪Z20/Z21帶動縱封軸Ⅴ、Ⅵ旋轉,以牽引、熱封合包裝袋,其速度由袋長決定,通過檢測動力分配軸Ⅰ的轉速調節步進電機的脈沖數來實現。供膜裝置和稱重分揀裝置分別用伺服電機驅動,由PLC控制器協調各動作。
3 橫封機構的改進
包裝機的縱封輥輪有兩個作用:① 縱向封合作用;② 帶動包裝膜進行送膜。而橫封輥輪的封合是間斷的,按正常的工作要求是在橫封進行封合這段時間內,它的線速度應與縱封輥輪的線速度保持一致,否則會使包裝膜受拉伸而破損或者是松弛起皺,造成封合不良。為此,本機設置偏心鏈輪機構(圖3),以保證袋長在一定范圍內變化時,能使橫封輥輪在封合時的圓周線速度與縱封輥輪的線速度相一致,以使包裝機適應不同包裝袋的長度需求,保證機器的正常工作。通過調節鏈輪相對于主軸的偏心位置以改變偏心距,進而實現變傳動比(式(1))傳動[2],工作時鏈輪帶動橫封軸做變速轉動且保持與包裝袋下落速度一致,保證密封質量。

圖3 偏心鏈輪機構Figure 3 Mechanism of eccentric sprocket

式中:
ω0——主動偏心鏈輪的等角速度,rad/s;
ω——從動鏈輪的瞬時角速度,rad/s;
e——主動鏈輪的偏心距,mm;
L——主從鏈輪的回轉中心距,mm;
R——主從鏈輪的節圓半徑,mm。
4 包裝機的參數化建模與模擬仿真
4.1 各零件的參數化設計
參數化技術是在工程設計實際應用中常用的CAD技術,它借助一組參數來控制設計結果,通過更換該組參數值以實現一系列相似零件的設計建模,可大大提高產品的設計效率。現以偏心鏈輪設計為例,詳細介紹在SolidWorks中的參數化建模過程[5-7]:
(1)為實現鏈輪的參數化和系列化,首先要確定鏈輪的主驅動參數,如鏈輪節距、齒數、鏈條滾子直徑、鏈輪寬度等作為整體變量,建立鏈輪的分度圓直徑、齒頂圓直徑、齒根圓直徑和齒廓型面參數與主參數的尺寸關系,使這些次要參數依附于主參數。并在SolidWorks中通過“工具→方程式”下拉菜單,輸入各主參數及其初始數值、尺寸關系,見圖4。
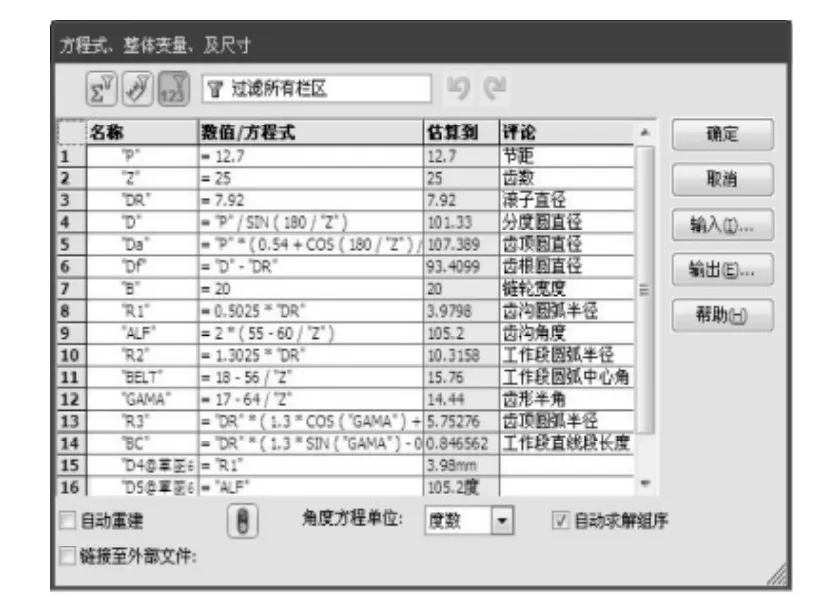
圖4 建立主參數和方程式Figure 4 The establishment of the main parameters and equations
(2)運用“旋轉凸臺”命令生成鏈輪坯體、“拉伸切除”命令切出齒槽,鏈輪齒形是根據“三圓弧一直線”原則建立的,即齒溝圓弧、工作段圓弧、工作段直線、齒頂圓弧,它具有較好的嚙合性能和可加工性。在繪制草圖截面時通過雙擊各尺寸,輸入相應的方程式,系統會自動將該方程式加入方程式對話框中,并重新計算該尺寸值,在其數值前顯示∑標記,見圖5。各草圖必須完全定義,以確定各形狀之間的位置關系,保證模型對驅動參數的正確更新和重新構建。
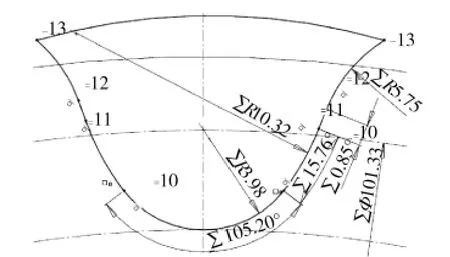
圖5 齒槽截面的參數化草圖Figure 5 The parametric sketch of tooth section
(3)對齒槽特征進行圓周陣列,生成各輪齒,并對軸面齒形兩側切成圓弧狀,以便于鏈節進入和退出嚙合。
4.2 虛擬裝配與模擬仿真
根據不同袋長的需求,必須輸出滿足工藝要求的角速度,使各機構動作協調一致。縱封機構的角速度可以通過袋長直接轉換成步進電機的脈沖數,所以設計的關鍵問題是保證偏心鏈輪機構與料袋下落速度匹配,為此在SolidWorks COSMOSMotion模塊中設置各靜止和運動零部件,并添加運動副約束和驅動,對產品的可裝配性和運動特性進行分析[8,9],包裝機主傳動系統的三維實體模型見圖6、偏心鏈輪機構的輸出運動特性曲線見圖7。

圖6 傳動系統的三維模型Figuer 6 3Dmodel of transmission system
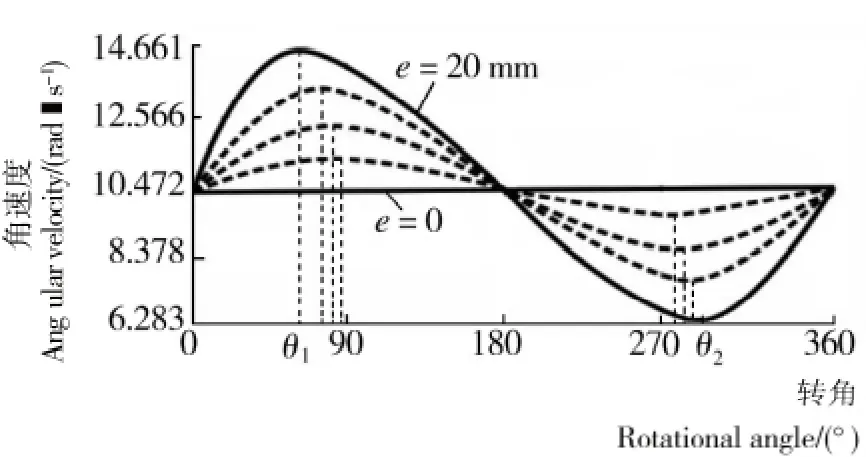
圖7 偏心鏈輪機構輸出運動特性曲線Figure 7 The output movement characteristics of eccentric sprocket mechanism
通過對偏心鏈輪機構運動仿真結果可知:①θ1和θ2分別為從動鏈輪具有最大、最小角速度時主動鏈輪的瞬時轉角,這兩個極值點將作為包裝機橫封機構的熱封點;② 當兩鏈輪的回轉中心距L增大時,從動鏈輪的極限角速度幾乎不變,但其對應的主動鏈輪極限角θ1和θ2變化較大。在結構允許的情況下,適當增大L有利于滿足橫封機構讓袋的工藝需求;③ 偏心鏈輪的偏心距e變化時,從動鏈輪的極限角速度及其對應的極限角θ1和θ2會發生較大變化。在包裝袋長度較大時,應在較大的極限角速度下進行熱封,即選擇較大的鏈輪偏心距。因此根據袋長按照勻速可以計算出包裝袋的下降速度,從而通過仿真便可確定出鏈輪偏心距e。
5 結論
借助SolidWorks三維軟件完成了對全自動立式包裝機的傳動系統和橫封機構的參數化建模和模擬仿真,解決了包裝袋易錯邊、起皺、夾料和封口不平的問題。已成功地對某藥業公司的10臺DXDK40II型包裝機實施了改進,提高了設備的自動化程度和包裝質量。為節約成本盡量保留了原設備的傳動結構,對今后新開發的包裝機可以采用全電動方式,各執行機構均采用步進電機或伺服電機直接驅動,將大幅簡化傳動系統,縮短生產周期、擴大設備應用范圍。
1 許林成.包裝機械原理與設計[M].上海:上海科學技術出版社,2004:122~177.
2 肖蓉川.偏心鏈輪機構在顆粒包裝機中的分析與設計[J].包裝工程,2008,29(7):57~59.
3 韓炬,王瑩,郭亞楠.包裝機熱封機構的建模及動力學分析[J].食品與機械,2013,29(1):146~148.
4 陳士祥,束蓓,邵剛.一種新型立式充填自動包裝機的系統[J].包裝與食品機械,2007,23(6):28~33.
5 黃文華.基于Solidworks的齒輪CAD關鍵技術的研究[J].制造業自動化,2011,33(16):67~70.
6 陳鵬飛.基于ModelCenter的精密氣浮工件臺系統建模與參數優化[J].組合機床與自動化加工技術,2014(4):15~18.
7 楊振和,蘇振華,楊卓.齒輪軸承結構參數優化設計[J].食品與機械,2011,27(2):50~51.
8 孫斐.自頂向下的旋轉閥參數化設計[J].食品與機械,2011,27(2):52~53.
9 陳塞克,凌軒.基于Solidworks齒輪連桿機構的運動仿真[J].食品與機械,2012,28(6):177~179.
