高速滾動球軸承動態(tài)載荷計(jì)算改進(jìn)方法的研究
2015-12-30 03:19:46盛夏,李蓓智,張亞偉
振動與沖擊 2015年3期
第一作者盛夏男,碩士生,1986年生
通信作者李蓓智女,教授,1955年生
高速滾動球軸承動態(tài)載荷計(jì)算改進(jìn)方法的研究
盛夏,李蓓智,張亞偉
(東華大學(xué)機(jī)械工程學(xué)院,上海201620)
摘要:在離心力和陀螺力矩的作用下,滾動球軸承高速旋轉(zhuǎn)時的內(nèi)部載荷分布與軸承靜止情況下的載荷分布具有顯著差異,其主要影響因素包括,滾動軸承的接觸角、軸承預(yù)緊位移以及旋轉(zhuǎn)速度等。基于Jones&Harris(簡稱J&H)力學(xué)模型的軸承載荷分布的分析方法已經(jīng)得到了廣泛的應(yīng)用。然而其計(jì)算公式多、迭代繁瑣、收斂速度慢。針對此現(xiàn)象,研究了軸承動態(tài)載荷分布規(guī)律及其算法,提出了改進(jìn)的J&H軸承數(shù)值計(jì)算模型,給出相應(yīng)的簡化計(jì)算步驟。計(jì)算與對比結(jié)果表明,改進(jìn)的J&H計(jì)算模型在其應(yīng)用范圍內(nèi),可以大幅減少計(jì)算時間。
關(guān)鍵詞:高速滾動軸承;動態(tài)載荷計(jì)算;數(shù)值計(jì)算簡化模型
收稿日期:2013-10-21修改稿收到日期:2014-02-14
中圖分類號:TH133.33文獻(xiàn)標(biāo)志碼:A
A simplified approach for calculation of rolling ball bearing internal dynamic load distribution
SHENGXia,LIBei-zhi,ZHANGYa-wei(Research Center of Advanced Manufacturing Technology, College of Mechanical Engineering, Donghua University, Shanghai 201620, China)
Abstract:Rolling elements in a high speed rolling bearing are influenced by centrifugal force and gyroscopic effect its internal load distribution is quite different from that of a static bearing. The main influencing factors include bearing contact angles, axial preload and bearing rotation speed, etc. The method of calculating the distribution of bearing internal loads based on Jones & Harris (J&H) model is widely used. However, it involves too many equations, complicated iterations and slow convergence speed. Here, the law and algorithm of bearing internal load distribution were studied to simplify J&H bearing model. A new simplified calculation procedure was provided. The computation results showed that the improved J & H approach can reduce the calculation time significantly in its application range.
Key words:high speed rolling bearing; calculation of dynamic load; simplified model
滾動軸承是重要的旋轉(zhuǎn)機(jī)械基礎(chǔ)件,通常被稱為"工業(yè)的關(guān)節(jié)",其重要性顯而易見[1]。尤其對于高速、精密機(jī)床,滾動軸承的工作精度很大程度上決定了機(jī)床的加工精度。很多學(xué)者[2-3]開展了高速主軸-軸承系統(tǒng)的研究。 隨著制造業(yè)對機(jī)床精度和速度越來越高的要求,滾動軸承的相關(guān)研究也越來越廣泛,尤其是在轉(zhuǎn)子動力學(xué)方面,軸承在高速運(yùn)轉(zhuǎn)時的動態(tài)性能受到了各個學(xué)者的關(guān)注[4-6]。Hertz首先提出了用于滾動軸承力學(xué)分析的接觸理論,Jones[7]最先以Hertz接觸理論為基礎(chǔ),建立了滾動軸承動態(tài)力學(xué)分析的擬靜力學(xué)模型,并在軸承力學(xué)平衡方程中引入了慣性力效應(yīng);Harris在Jones的基礎(chǔ)上提出了更完善的軸承計(jì)算模型,其中考慮了高速運(yùn)轉(zhuǎn)時,滾球的陀螺效應(yīng),并建立了經(jīng)典的Jones & Harris滾動軸承內(nèi)部動態(tài)載荷數(shù)值計(jì)算模型[8],Jones和Harris都采用了擬靜力學(xué)法,該計(jì)算模型易于編程和計(jì)算,且被相關(guān)實(shí)驗(yàn)驗(yàn)證了其準(zhǔn)確性,因此,一直被不斷地發(fā)展并應(yīng)用至今。 Gupta[9]考慮了滾球的運(yùn)動狀態(tài)、受力狀態(tài)以及各零件之間的相互作用關(guān)系, 提出了滾動軸承受力分析的動力學(xué)模型。然而Gupta的模型所采用的微分方程在使用計(jì)算機(jī)編程計(jì)算時過于復(fù)雜,限于當(dāng)時的計(jì)算機(jī)水平而沒有很好的得到發(fā)展。
J&H軸承模型涉及了相當(dāng)數(shù)量的非線性方程組,并且一些計(jì)算參數(shù)之間有非常強(qiáng)的耦合性,一些計(jì)算參數(shù)在迭代的過程中需要重復(fù)使用從而造成迭代收斂過慢的情況[10-11],根據(jù)文獻(xiàn)[10-11],基于J&H模型進(jìn)行了大量數(shù)值計(jì)算的測試后,認(rèn)為該模型的收斂性和計(jì)算速度有待進(jìn)一步改善和提高,尤其是用于分析高速軸承[12]。同樣,唐運(yùn)冰等[13]也曾提到,在計(jì)算滾動軸承動態(tài)載荷分布以及進(jìn)一步分析其動力學(xué)性能時,容易發(fā)生收斂困難,振蕩等不利因素,并建議加入松弛系數(shù)。為此,本文將分析Jones & Harris軸承模型的不足,研究軸承動態(tài)載荷分布規(guī)律及其計(jì)算方法,提出相應(yīng)的改進(jìn)方法與模型,以提高高速滾動球軸承動態(tài)載荷分布的計(jì)算分析的效率。
1Jones & Harris滾動軸承動態(tài)模型簡述
1.1Jones & Harris模型

圖1 軸承滾球方位角及其序號定義 Fig.1 Azimuth of rolling bearing
Jones & Harris模型(以下簡稱為J&H模型)假設(shè)軸承相鄰滾球間隔的角度均等,即該角度恒為Δφ。每個滾球?qū)?yīng)序號q如圖1所示,并稱φq為第q個滾球的方位角,滾球總數(shù)為Z,則Δφ=2π/Z。滾動軸承在高速轉(zhuǎn)動時(一般為轉(zhuǎn)速大于20 000 r/min或dmn大于5×105),受到發(fā)生公轉(zhuǎn)與自轉(zhuǎn)的滾球?qū)⑹艿诫x心力和陀螺效應(yīng)的作用,使?jié)L球與滾道間的位置關(guān)系與軸承處于靜止時有明顯差異。圖2為滾動軸承靜止時滾球與滾道的橫截面示意圖,其中,BD表示內(nèi)外滾道曲率中心的距離,BD=ro+ri-D=(fo-fi-1)D。對于滾動軸承,fo和fi分別是軸承外滾道,內(nèi)滾道的曲率半徑系數(shù),通常為0.50~0.54。軸承在未受到任何載荷時的接觸角為α0。
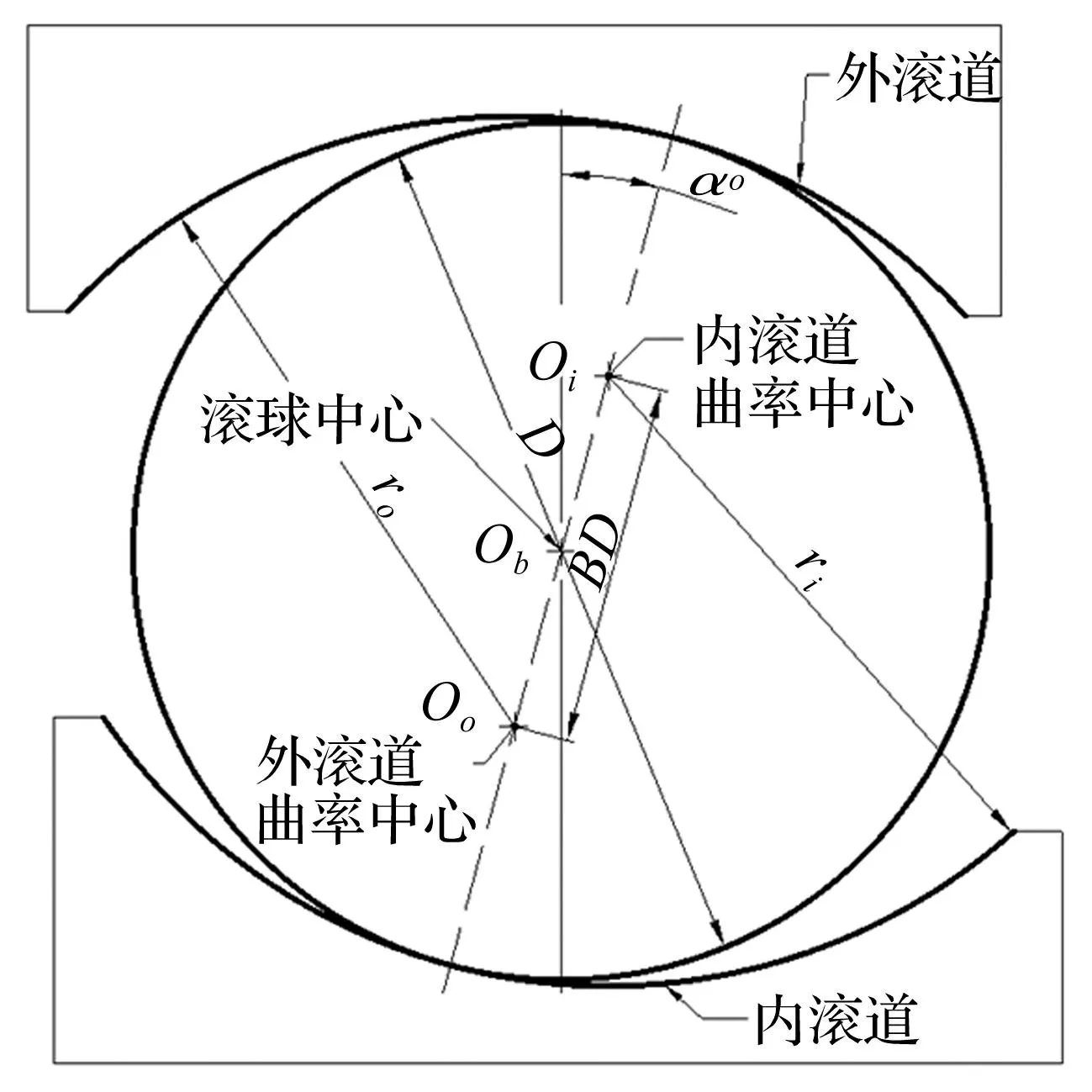
圖2 單個滾球與滾道的靜態(tài)接觸 Fig.2 Static contact between a ball and raceways
軸承在旋轉(zhuǎn)時,滾球與滾道的接觸點(diǎn)發(fā)生變化,其位置關(guān)系及接觸角的變化如由圖3所示,內(nèi)接觸角αiq增大而外接觸角αoq減小;由于離心力和陀螺力矩的作用產(chǎn)生了滾球與滾道的接觸變形δiq及δoq;(內(nèi)滾道處的陀螺力矩被滑動摩擦抵消),同時,在外載荷和滾球的共同作用下,軸承內(nèi)圈產(chǎn)生位移變化(反映在內(nèi)滾道曲率中心的變化上)。
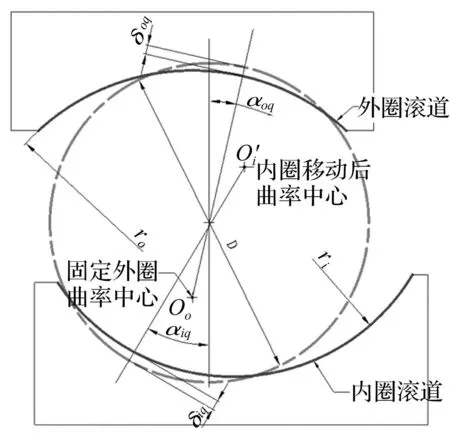
圖3 轉(zhuǎn)動滾球與滾道的動態(tài)接觸情況 Fig.3 Contact between rotating ball and raceways
通過圖4的描述可以清晰地觀察軸承旋轉(zhuǎn)時某個滾球與滾道之間的幾何關(guān)系與變形協(xié)調(diào)關(guān)系。圖中δrq,δa為內(nèi)圈徑向與軸向的變形量。Oo,Ob以及Oi分別為軸承靜止時的外滾道曲率中心、滾球中心和內(nèi)滾道的曲率中心。和Oi′和Ob′分別為軸承旋轉(zhuǎn)時滾球與內(nèi)滾道曲率中心發(fā)生偏移后所處的位置。αiq,αoq為軸承的動態(tài)內(nèi)、外接觸角。軸承轉(zhuǎn)速和外載荷的變化都會使Oi′,Ob′,αiq,αoq隨之變化。為了求得這些變化量或計(jì)算軸承內(nèi)圈整體的偏移量,需要建立一系列的關(guān)系式來求解。
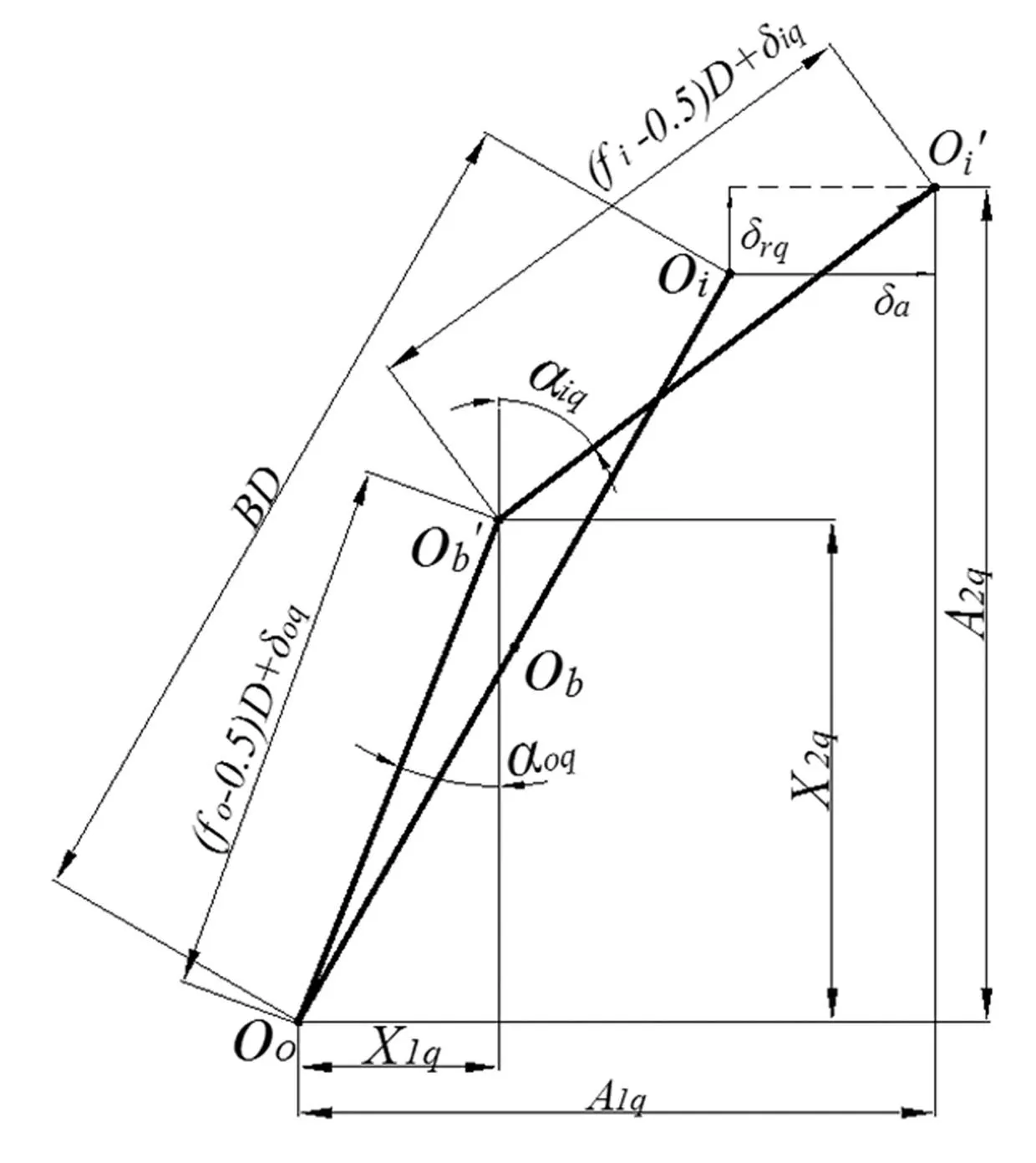
圖4 滾球與滾道的接觸情況幾何關(guān)系圖 Fig.4 Geometry relations between rollingelement and raceways
根據(jù)圖4,相關(guān)關(guān)系式由式(1)~(8)所示。
(1)
(2)

A1q=BDsinα0+δa
(3)
A2q=BDcosα0+δrq
(4)
據(jù)式(1)~(4)可以解得αiq,αoq的三角函數(shù)值:
(5)
(6)
結(jié)合圖4和式(1)~(5)通過勾股定理建立等式:
(A1q-X1q)2+(A2q-X2q)2-
[(fi-0.5)D+δiq]2=0
(7)
(8)
根據(jù)滾球的受力平衡(圖5)可得到:
Qiqsinαiq-Qoqsinαoq-
(9)
Qiqcosαiq-Qoqcosαoq-
(10)

圖5 滾球的受力 Fig.5 Loads on the ball
其中:Qiq和Qoq為Hertz接觸力,F(xiàn)cq,Mgq為該方位角滾球所受的離心力和陀螺力矩,這些量計(jì)算方法可參考文獻(xiàn)[14]。
方程(7)~(10)僅反映軸承中第q個滾球與內(nèi)外圈的相互作用情況。將所有滾球?qū)S承內(nèi)圈的接觸力進(jìn)行求和,還可以建立如下平衡方程:
(11)
(12)
式中:Fr和Fa表示作用在軸承內(nèi)圈的徑向和軸向外部載荷,Z為軸承內(nèi)含的滾球數(shù)。
1.2J&H模型的計(jì)算過程及其不足
式(7)~(10)以及(11)、(12)構(gòu)成了Jones & Harris軸承動態(tài)載荷分布計(jì)算模型。方程組中總共未知變量為4Z+2個,其中方程組(7)~(10)包含4Z個未知量,(11)、(12)包含兩個未知量。同時,該數(shù)值計(jì)算模型總共包含4Z+2的方程數(shù)。因此,在理論上方程組有解,通過迭代法可以得到其近似解。在該計(jì)算模型中的未知量并非固定不變,可以根據(jù)要求設(shè)定未知量。Jones 和Harris 都以X1q、X2q、δiq、δoq以及δrq和δa(其中X1q、X2q表示滾球在X,Y方向的偏移位移量,δiq、δoq分別表示內(nèi)外滾道接觸變形量,δrq和δa則分別表示內(nèi)圈的軸向及徑向變形量)為未知變量。然而經(jīng)過計(jì)算發(fā)現(xiàn),δrq和δa并不適合作為未知量,他們對于給定量Fr和Fa的大小極為敏感,極易造成數(shù)值計(jì)算的不穩(wěn)定[12],采用Fr和Fa作為未知變量可以極大地提高方程組的收斂性,更有利于方程組的求解。因此,本文中的數(shù)值模型采用這種未知量設(shè)定方法。顯然,在該計(jì)算模型中都是非線性方程組,可以看出某些變量如:cosαiq與X2q等在方程組中有非常強(qiáng)的耦合性,且對數(shù)值變化敏感。加上方程數(shù)目較多,計(jì)算過程非常復(fù)雜且費(fèi)時。
2改進(jìn)的J&H計(jì)算模型
2.1改進(jìn)模型的假設(shè)
對于由4Z+2個等式所構(gòu)成的非線性方程組來說其計(jì)算過程必然顯得過于繁瑣和費(fèi)時。因此若能合理簡化方程或減少方程組的數(shù)目,可使模型的計(jì)算效率得到顯著提升。
首先,構(gòu)成多達(dá)4Z個方程原因是式(7)~(10)中的參數(shù)會根據(jù)每個滾球方位角的不同而改變。對于任意第q個位置的滾球,若令δrq=0即假設(shè)沒有徑向力作用于軸承內(nèi)圈。這樣,對于軸承中每個方位角的滾球,所有的變量都相同,式(7)~(8)所組成的方程組是完全相同的。因此在這個前提下,只需計(jì)算對應(yīng)任意方位角的(7)~(10)式,就可以得到所有方位角的解。
根據(jù)這點(diǎn)可以把軸承在高速旋轉(zhuǎn)時滾道與滾球的變形分解為兩個階段進(jìn)行:

圖6 Jones & Harris 模型簡化的兩個步驟 Fig.6 Two steps of simplifying the Jones & Harris’s model
第一階段:首先不考慮徑向力載荷對軸承內(nèi)圈的作用,即先認(rèn)為δrq=0。由式(7)~(10)計(jì)算出X1q、X2q、δiq、δoq(按任意方位角的滾球計(jì)算均可)。顯然,如果不考慮徑向力的作用,軸承內(nèi)圈的徑向位移為0,計(jì)算結(jié)果同樣如此。圖6 (a)表示了這一過程,軸承內(nèi)圈曲率中心由原先處于靜平衡狀態(tài)下的Oi軸向平移到Oi′,并在這個位置達(dá)到平衡狀態(tài);滾球與內(nèi)外滾道產(chǎn)生接觸變形δiq、δoq;同時滾球中心從Ob偏移到Ob′。
第二階段:在步驟1的基礎(chǔ)上重新將原有的徑向力加入到計(jì)算中。此時,原先處于平衡狀態(tài)的滾球與滾道會再次發(fā)生位置上的偏移,滾球中心Ob′移動到Ob″,而內(nèi)圈滾道的曲率中心Oi′則偏移到Oi″。圖6(b)著重反映了這個過程。

(13)
同時第二階段滾球的靜力平衡公式為:
(14)

(15)

通過這樣對J&H軸承模型的簡化,計(jì)算方程數(shù)由4Z+2縮減到2Z+6,其中2Z個方程為對應(yīng)不同滾球方位角的式(14)與(15),另外“4+2”個方程為方程組(7)~(10),這4個等式中的δrq=0;以及式(11)和(12)。顯然,模型簡化后方程數(shù)目幾乎減少一半,且式(14)與(15)的參數(shù)之間耦合度明顯較J&H軸承模型的更弱,并且無需使用Newton迭代法就可以得到結(jié)果。在J&H模型當(dāng)中時常會遇到迭代收斂慢的情況,而簡化后的模型對此則大為改善。
2.2改進(jìn)方法的可行性分析
對于簡化J&H軸承模型,上文提出了兩個關(guān)鍵的假設(shè)。其一是考慮徑向力對軸承內(nèi)圈的作用與否都不會對動態(tài)外接觸角αoq產(chǎn)生影響。其二假設(shè)認(rèn)為徑向力作用以及其作用的大小不會對滾動軸承的軸向位移造成影響。現(xiàn)對這兩個假設(shè)的可行性進(jìn)行分析。
以高速滾動軸承B7005C/P4為例,其軸承基本參數(shù)由表1所示。
可行性分析一:由圖7可以看出徑向力及其大小對于動態(tài)外接觸角的余弦值的影響。在低于9 000r/min時,可以看到徑向力對外接觸角具有一定的影響,無徑向力作用和1 000 N徑向力作用差別可達(dá)0.009(該誤差值為cosαoq誤差百分比的1%左右)。但當(dāng)軸承轉(zhuǎn)速超過10 000 r/min時,徑向力對cosαoq影響逐漸減弱,當(dāng)轉(zhuǎn)速達(dá)到12 000 r/min時,差別已經(jīng)可以縮小到0.002(該誤差為本身值的0.2%),即在式(14)中用無徑向力的cosαoq取代有徑向力的相應(yīng)值,其誤差大約為1%~0.2%。因此,改進(jìn)的J&H模型尤其適用于高速軸承。
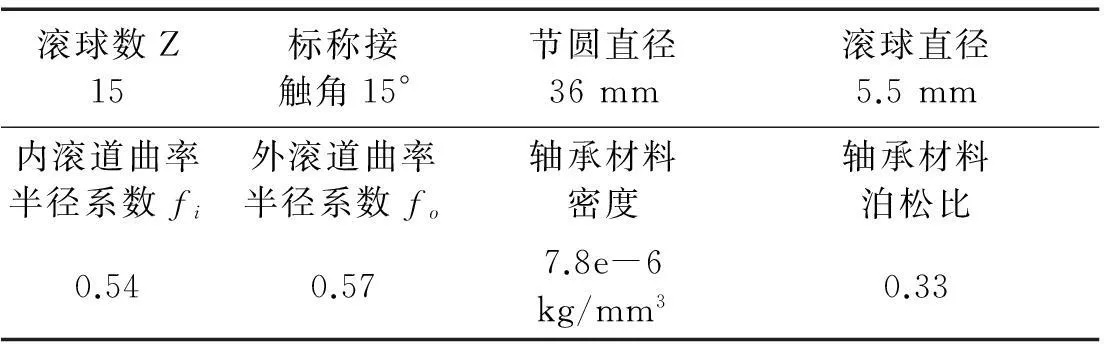
表1 B7005C/P4高速球軸承基本參數(shù)

圖7 不同轉(zhuǎn)速下徑向力與軸承外接觸角余弦值的關(guān)系 Fig.7 Influences of radial forceand various speeds on cosα oq
可行性分析二:文獻(xiàn)[14-15]的相關(guān)討論認(rèn)為,對于軸承內(nèi)圈受到純徑向力作用時,內(nèi)圈產(chǎn)生的軸向位移可以忽略不計(jì)。此外,高速機(jī)床的軸承的預(yù)緊力能夠?qū)⑤S承內(nèi)圈保持在一定的位置,若機(jī)床采用多組軸承的配置方法,如“背靠背”或“面對面”等也能約束軸承內(nèi)圈的軸向位移。因此,在改進(jìn)的J&H模型的計(jì)算過程中忽略徑向力對軸向位移的影響也是可行的。
3案例分析
以B7005C/P4高速球軸承為例(見表1),分別使用J&H和改進(jìn)的J&H計(jì)算模型對該軸承的高速旋轉(zhuǎn)時的動態(tài)參數(shù)進(jìn)行計(jì)算和對比分析,以驗(yàn)證改進(jìn)的J&H計(jì)算模型的有效性。由于假設(shè)軸承外圈定,且都采用外滾道控制理論,則軸承外滾道動態(tài)參數(shù)δoq和cosαoq對軸承的動態(tài)特性影響并不明顯,分析中主要針對內(nèi)滾道的動態(tài)特性參數(shù)δiq和cosαiq。數(shù)值模型由Matlab進(jìn)行編程與計(jì)算,兩種軸承模型的計(jì)算結(jié)果由圖8~圖11給出。
圖8、圖9分別為徑向力Fr=100 N和Fr=300 N時內(nèi)滾道接觸變形值δiq的計(jì)算分析結(jié)果。結(jié)果顯示,顯然較小的徑向載荷Fr情況下,改進(jìn)的J&H模型與J&H模型計(jì)算結(jié)果的差異非常之小,當(dāng)軸承轉(zhuǎn)速高于9 000 r/min時,可將計(jì)算結(jié)果的差異控制在0.2%以內(nèi)。因此改進(jìn)的J&H模型在計(jì)算高速輕載機(jī)床滾動軸承動態(tài)特性時,能完全替代J&H軸承模型。

圖8 徑向力F r=100 N時不同轉(zhuǎn)速下δ iq計(jì)算結(jié)果對比 Fig.8 Comparison of δ iq under different speed with F r=100 N

圖9 徑向力F r=300 N時 不同轉(zhuǎn)速下δ iq計(jì)算結(jié)果對比 Fig.9 Comparison of δ iq under different speed with F r=300 N

圖10 徑向力F r=100 N時不同轉(zhuǎn)速下cosα iq計(jì)算結(jié)果對比 Fig.10 Comparison of cosα iqunder different speed with F r=100 N
圖10和圖11給出了Fr=100 N和Fr=300 N時內(nèi)滾道動態(tài)接觸角cosαiq在相關(guān)轉(zhuǎn)速下的計(jì)算分析結(jié)果。顯然,除6 000 r/min時兩種模型的cosαiq計(jì)算結(jié)果有誤差外,其它轉(zhuǎn)速下兩者計(jì)算結(jié)果數(shù)值差異不超過1%。
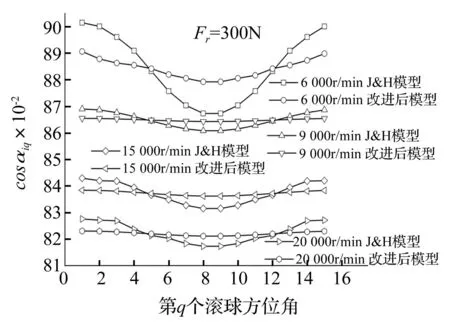
圖11 徑向力F r=300 N時 不同轉(zhuǎn)速下cosα iq計(jì)算結(jié)果對比 Fig.11 Comparison of cosα iqunder different speed with F r=300 N
4結(jié)論
本文分析和計(jì)算了軸承高速旋轉(zhuǎn)情況下的載荷分布,研究了軸承動態(tài)載荷分布規(guī)律及其計(jì)算方法,提出了改進(jìn)的J& H軸承數(shù)值計(jì)算模型,避免了Jones 和 Harris(J&H)計(jì)算模型需要對大量非線性方程組進(jìn)行迭代計(jì)算,不僅提高了計(jì)算效率,同時也弱化了參數(shù)之間的耦合程度。以B7005C/P4、(最好再給一種分析過的型號)等高速球軸承為對象,并根據(jù)相關(guān)高速軸承的實(shí)際工作要求,進(jìn)行了相應(yīng)的計(jì)算與分析,對比結(jié)果表明了,改進(jìn)的J&H計(jì)算模型,可以使計(jì)算工作效率提高2~3倍(見圖12)。
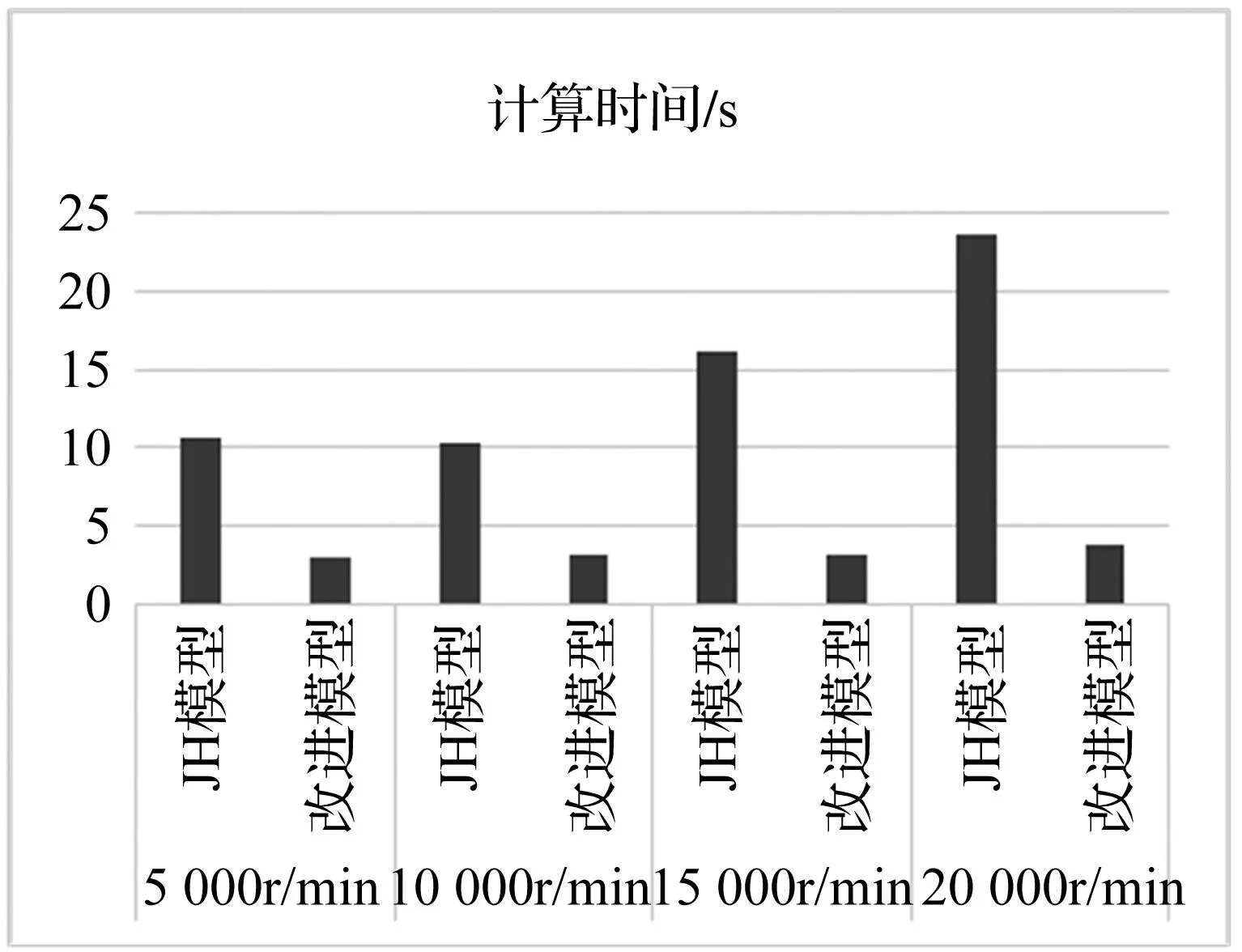
圖12 J&H模型與改進(jìn)J&H模型的計(jì)算時間比較 Fig.12 Comparison of calculation speeds between J&H model and simplified J&H model
當(dāng)滾動軸承低速旋轉(zhuǎn)時,改進(jìn)的J&H模型與J&H模型的計(jì)算結(jié)果最大存在8%的差異,但是軸承轉(zhuǎn)速在9 000 r/min或以上時,滾動軸承動態(tài)載荷分布的計(jì)算結(jié)果差異始終小于1%。誤差產(chǎn)生是由于在改進(jìn)模型的假設(shè)中,始終認(rèn)為外接觸角不變而造成的,實(shí)際上,軸承運(yùn)行速度很高時或者徑向載荷不大時,外接觸角的變化可以忽略。因此,在分析高速輕載機(jī)床的滾動軸承時,改進(jìn)的J&H模型具有明顯的計(jì)算分析優(yōu)勢。
參考文獻(xiàn)
[1]楊曉蔚, 周宇. 滾動軸承重要性與技術(shù)含量縱論[J]. 軸承,2003(1): 35-38.
YANG Xiao-lan, ZHOU Yu. Discussion on the Importance and technology of the rolling bearing[J]. Bearing,2003 (1): 35-38.
[2]Gunter E J. Dynamic stability of rotor-bearing systems: Scientific and technical information division[J]. National Aeronautics and Space Administration, 1966.
[3]Mechanical, Tecnmologyinc, Lathamny.Rotor-bearing dynamics design technology Part IV: [M].1965.
[4]Cao Yu-zhong, Altintas Y. A general method for the modeling of spindle-bearing systems[J]. Journal of Mechanical Design, 2004, 126(6): 1089.
[5]Sinou J J. Non-linear dynamics and contacts of an unbalanced flexible rotor supported on ball bearings[J]. Mechanism and Machine Theory,2009, 44(9): 1713-1732.
[6]Bai Chang-qing, Zhang Hong-yan, Xu Qing-yu. Subharmonic resonance of a symmetric ball bearing-rotor system[J]. International Journal of Non-Linear Mechanics, 2013, 50: 1-10.
[7]Jones A B. Ball motion and sliding friction in ball bearings[J]. Journal of Basic Engineering,1959,81:1-12.
[8]Harris T A,Mindel M H. Rolling element bearing dynamics[J]. Wear, 1973, 23: 311-337.
[9]Gupta K. Advanced dynamics of rolling elements[M]. Springerverlag; 1984.
[10]朱益利, 金超武, 許磊,等. 滾珠軸承力學(xué)模型的數(shù)值求解方法研究[J]. 中國機(jī)械工程,2013(4): 427-431.
ZHU Yi-li, JIN Chao-wu, XU Lei, et al. Methods of ball bearing mechanics model[J] China Mechanical Engineering,2013(4): 427-431.
[11]趙春江, 孫永春, 王建梅. 高速角接觸球軸承接觸角的求解分析[J]. 軸承, 2008(10): 1-4.
ZHAO Chun-jiang, SUN Yong-chun, WANG Jian-mei. Analysis on contact angle of high speed augular contact ball bearings[J]. Bearing,2008(10): 1-4.
[12]Liao Neng-tung, Lin Jen-fin. Ball bearing skidding under radial and axial loads[J]. Mechanism and Machine Theory,2002,37:91-113.
[13]唐云冰, 高德平, 羅貴火. 航空發(fā)動機(jī)高速滾珠軸承力學(xué)特性分析與研究[J]. 航空動力學(xué)報, 2006, 21(2): 354-360.
TANG Yun-bing,GAO Ge-ping,LUO Gui-huo. Research of aero-engin high-speed ball bearing[J]. Journal of Aerospace Power,2006, 21(2): 354-360.
[14]Harris Tedric A. Rolling bearing analysis[J]. John Wiley & Sons. INC, 2001.
[15]Palmgren A. Ball and roller bearing engineering, 3rd ed[M]. Burbank, Philadelphia: SKF Industries Inc., 1959.