主動懸掛式展開試驗裝置設計與試驗驗證
2015-12-23 06:49:20楊國云
航天器環境工程 2015年4期
關鍵詞:方向
侯 鵬,楊國云,宋 濤,陳 立
(1.上海衛星裝備研究所,上海 200240;2.上海航天設備制造總廠,上海 200245)
0 引言
懸掛法是實現空間機構、運動部件地面展開試驗常用的重力補償方法,根據懸掛式展開試驗裝置是否有源,可分為被動和主動兩種[1]。被動懸掛法結構形式簡單,但受導軌摩擦阻力、隨動件慣性等因素影響,補償誤差大,展開試驗的有效性相對較差[2-4]。主動懸掛法的重力補償精度較高,并可以實現單個吊點的多自由度運動,避免試件的多次翻轉,但其結構和控制系統復雜,技術難點多,研制難度大[5-6]。
本文依據單吊點主動懸掛法的原理,設計研制主動懸掛式展開試驗裝置,并開展試驗驗證。
1 試驗裝置組成及工作原理
1.1 試驗裝置組成
主動懸掛式展開試驗裝置組成如圖1所示,包 括支撐結構、x/y方向電機、z方向力矩電機、角度檢測機構、拉力傳感器等。角度檢測機構檢測吊繩的傾斜角度,并控制x/y方向電機實現二維的主動位置跟隨,保證吊繩豎直;拉力傳感器檢測吊繩上的張力并反饋給力矩電機,進行精確的重力補償。當試件展開時,該裝置可通過力矩電機在xOy平面上跟隨試件運動,并補償試件的重量。
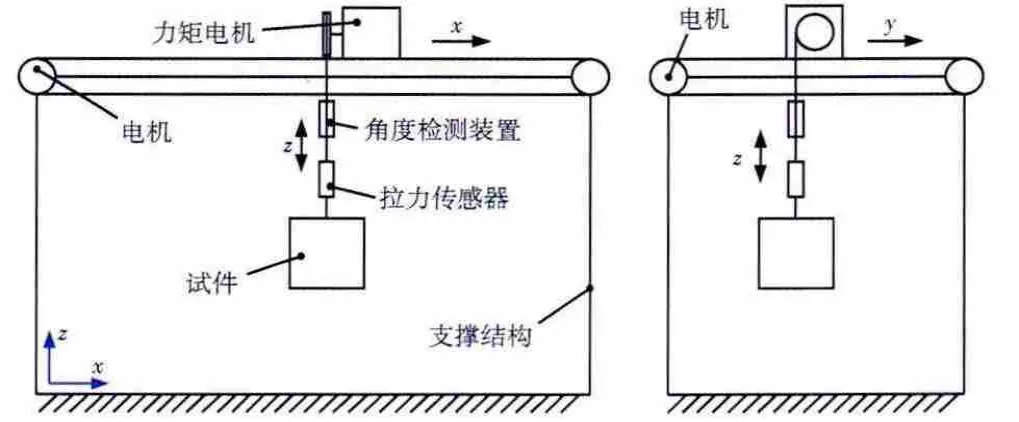
圖1 主動懸掛式展開試驗裝置組成 Fig.1 The composition of active suspended deployable test system
1.2 工作原理
該懸掛裝置可以簡化為一個懸點運動變化、變擺長的三自由度擺動運動系統。如圖2所示,滑塊質量為m,初始狀態速度為vs,水平加速度為a,吊繩傾角為θ,懸掛物體運動速度為vp[7]。
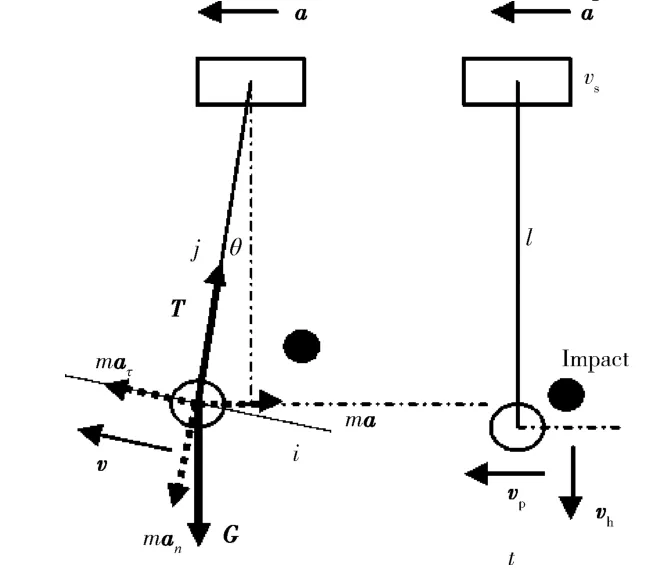
圖2 懸掛裝置工作原理 Fig.2 Working principle of the suspending device
根據達朗貝爾原理對懸掛物體進行受力分析,可得

式中:T為吊繩的張力;Fa為慣性力;G為重力。
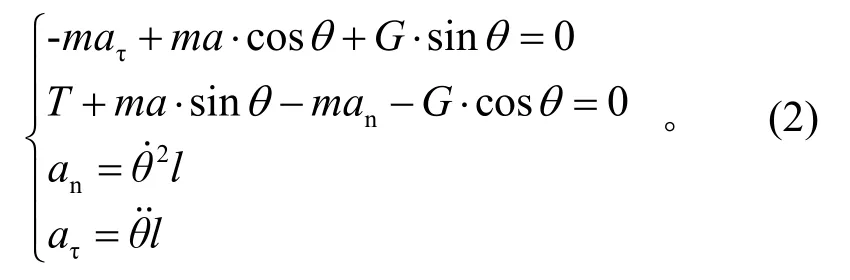
建立i和j方向的力學分析圖,可得動力學基本方程組:
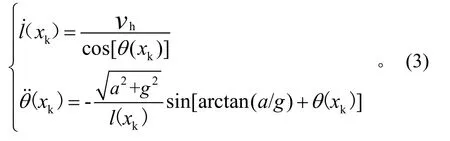
以時間為變量,得到xk時刻的運動學方程組:
2 試驗裝置設計
2.1 機械結構設計
圖3為主動懸掛式展開試驗裝置設計方案示意圖,由恒張力機構、二維主動跟隨機構、二維角度測量機構等組成。在天線展開過程中,試驗裝置吊點過天線理論質心,恒張力機構保證吊繩懸掛力的大小與天線所受重力相等,二維主動跟隨機構和角度測量機構保證吊繩懸掛力的方向與重力相反,從而實現重力補償。

圖3 主動懸掛式展開試驗裝置設計方案 Fig.3 The design scheme of the active suspended deployable system
2.1.1 二維主動跟隨機構
圖4為二維主動跟隨機構,它確保吊繩不傾斜,使懸掛力始終與重力方向相反。當某時刻天線運動使吊繩產生一個傾角θ,傾角檢測機構檢測到這一傾角后,立即啟動跟隨電機通過傳動帶驅動滑車向天線運動方向靠攏,實現滑車平面內的位置跟隨。
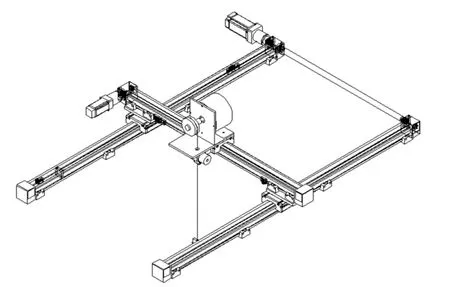
圖4 二維主動跟隨機構 Fig.4 2-DOF active following mechanism
2.1.2 二維角度測量機構
圖5為二維角度測量機構。吊繩先后穿過2 個正交的擋片,分別測量x,y方向的傾角θx,θy,并將傾角轉換為電壓信號反饋到控制器,驅動跟隨電機運動。每個擋片由2 塊夾板組成,與碼盤轉軸相連,4 倍頻后每個擋片的傾角分辨率約為0.04°,碼盤的線數為2048 線。由于吊繩為柔性體,在運動過程中容易發生晃動,所以需要設定傾角測量的死區值,以保證系統的穩定性。
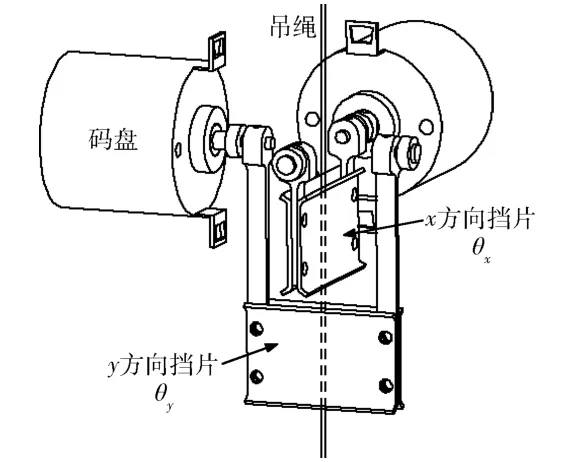
圖5 二維角度測量機構 Fig.5 2-DOF angle measuring mechanism
2.1.3 恒張力機構
如圖6所示,拉力傳感器連接在吊繩上以檢測吊繩張力。吊繩一端與天線的質心連接,另一端與力矩電機連接。通過力矩電機收卷輪的收放,來控制吊繩的張力和吊點豎直方向的運動。因此,需要對力矩電機的輸出扭矩和轉速進行控制。
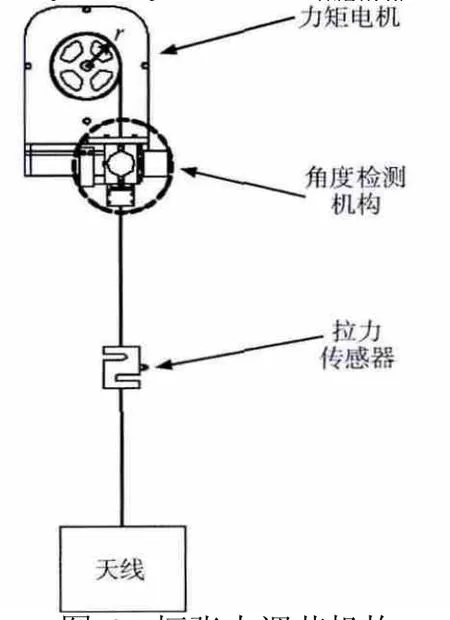
圖6 恒張力調節機構 Fig.6 Constant tension adjusting mechanism
在天線的展開過程中,引起吊繩張力波動的因素有吊點的上下運動、吊繩的傾斜、吊繩的彈性變形以及天線運動過程中的慣性力等。其中吊點的上下運動是主要因素。
根據計算,由于收卷輪半徑為50 mm,當天線運動部分質量為30 kg 時,恒張力機構在勻速運動狀態下力矩電機的額定輸出扭矩為15 N·m。
2.2 控制系統設計
2.2.1 PID 控制器
主動懸掛式展開試驗裝置需要控制3 個方向的電機運動。x,y方向的交流伺服電機控制吊繩運動方向的擺角,實現x,y方向的位置跟隨;z方向的力矩電機控制吊繩豎直向的張力,實現吊繩恒張力輸出。
二維角度測量機構測得天線展開過程中吊繩的傾角,并反饋給控制器;控制器采用增量式PID控制算法,實現x,y方向伺服電機的位置環精確控制。二維角度控制策略如圖7所示。
對于z方向的張力控制,需要考慮兩方面因素:首先為張力的非線性干擾,其次為機械傳動裝置中各種機械摩擦等不確定影響。傳統的PID 控制策略對于線性系統能夠達到較好的控制效果,但對具有強非線性的系統很難達到精確控制。因此需要設計一種具有快速響應的非線性控制策略。
目前廣泛應用的非線性控制方法有自適應控制、神經網絡控制、模糊控制和滑模變結構控制等。本設計采用模糊PID 控制方法,并結合伺服環級聯,將拉力傳感器采集的信號作為最外環輸入給位置環,通過位置環、速度環、電流環控制實現天線展開過程中張力的恒定。恒張力控制策略如圖8所示。

圖7 二維角度控制策略 Fig.7 2-DOF angle control strategy

圖8 恒張力控制策略 Fig.8 Constant tension control strategy
2.2.2 控制系統實現
控制系統硬件構成原理如圖9所示。上位機采用工控機,負責完成試驗參數設定、過程控制和顯示;下位機采用IMAC400 運動控制器,閉環控制3 個方向伺服電機的運動。在天線展開過程中,一方面,通過二維角度測量機構的光電編碼器采集x,y方向吊繩的角度變化,以控制x,y方向伺服電機運動,保證吊繩始終處于鉛垂狀態;另一方面,通過拉力傳感器實時測量吊繩張力的變化,以控制z方向力矩電機,保證吊繩上的張力恒定。
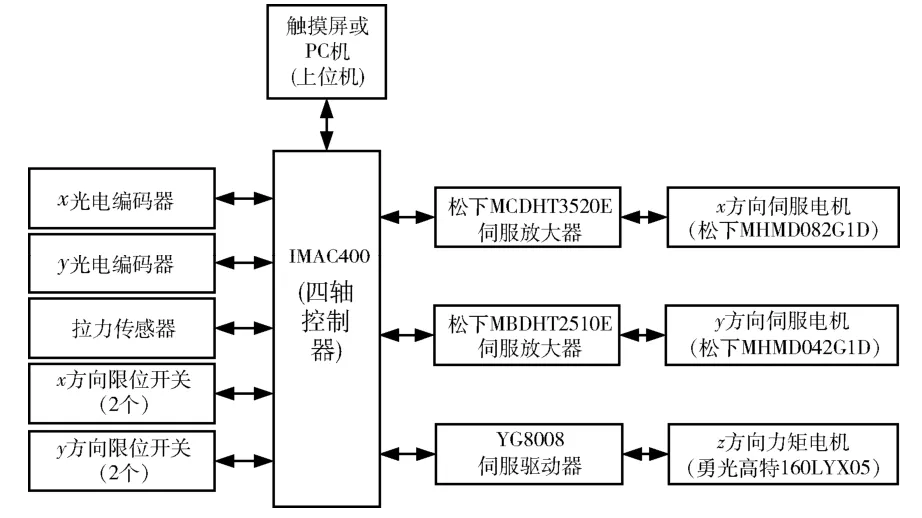
圖9 控制系統硬件原理 Fig.9 The hardware principle of the control system
控制系統軟件控制流程如圖10所示。
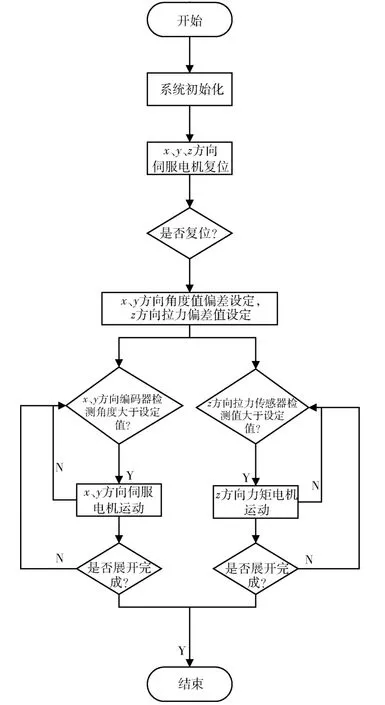
圖10 控制系統軟件控制流程 Fig.10 The software flow chart of the control system
首先系統初始化,3 個方向的伺服電機復位。其次,設定x,y方向的角度偏差值,以及z方向的張力偏差值。再次,x,y方向編碼器檢測吊繩角度信號,判斷其是否超出設定的角度偏差值,若超過,則x,y方向伺服電機啟動,使角度縮小;與此同時,拉力傳感器檢測吊繩張力信號,判斷其是否超過設定的張力偏差值,若超過,則z方向力矩電機向下或向上運動,以保持吊繩張力恒定。最后,當天線展開到位后,控制系統軟件流程結束。
3 試驗驗證
為驗證試驗裝置及控制系統的有效性,需開展地面試驗驗證,其試驗裝置及控制系統實物如 圖11所示,主要驗證該試驗裝置x,y方向運動學控制性能和z方向張力控制性能。
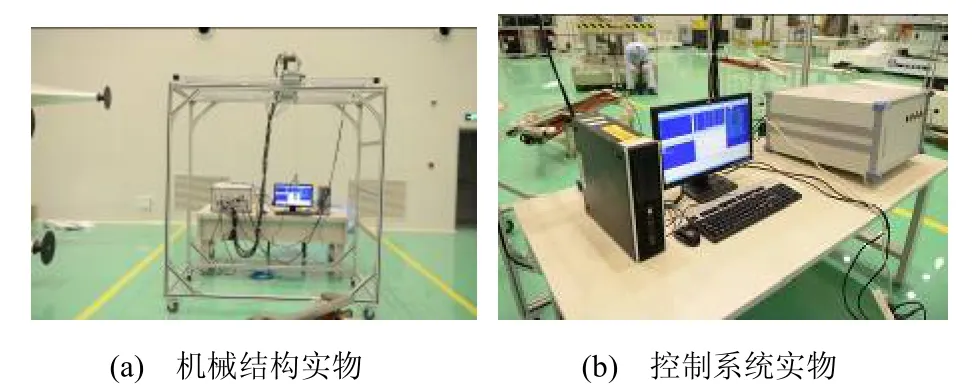
圖11 主動式展開試驗裝置實物圖 Fig.11 The active suspended deployment system
在拉力傳感器下吊掛一個重5 kg 的重物,控制該重物以0.1、0.3、0.5 m/s 的速度沿x,y,z三個方向運動,采集在整個運動過程中的x,y方向編碼器的角度值。試驗結果表明:1)吊掛重物做勻速運動,x,y方向編碼器角度變化非常小,最大僅約1.15°(參見圖12);2)吊掛重物做加速運動時,x,y方向編碼器角度變化隨加速度增大而 增大。
在拉力傳感器下分別吊掛重5、10、15、20 kg的重物,使其沿z方向上下運動,采集z方向吊繩張力變化情況,試驗結果如圖13所示:1)在整個運動過程中,拉力傳感器所測得的力有一定波動,但波動較小;2)隨著吊掛質量的增加,吊繩張力波動增大。分析原因為:一方面,由于張力控制采用伺服環級聯的控制方式,張力檢測值經模糊PID控制后送給位置環控制,這個過程中存在誤差;另一方面,張力值受吊繩的運動角度偏差的影響,導致張力值的小幅波動。
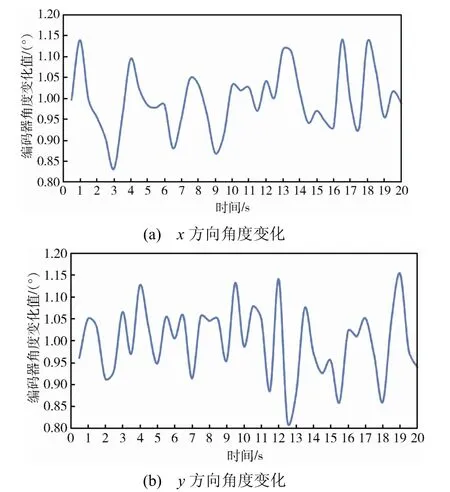
圖12 電機勻速運動時x,y 方向角度變化 Fig.12 The angle changes in x and y directions at a constant speed
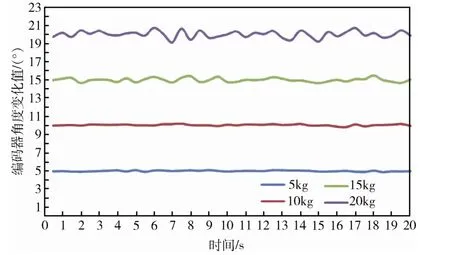
圖13 電機勻速運動時z 方向張力變化 Fig.13 The tension change in z direction at a constant speed
4 結束語
本文設計研制了一種主動懸掛式展開試驗裝置,并開展了裝置性能的試驗驗證,結果表明:該裝置實現了吊點的位置主動跟隨和重力主動補償,能夠滿足天線等有源活動部件的地面展開試驗的使用要求。
后續將開展誤差源影響因素分析與評價,優化控制系統軟硬件,提高控制精度,并提升人機界面 交互水平,使其能夠實時顯示活動部件展開過程中的位移、速度、加速度和張力曲線等。
(References)
[1] 從強.空間機構地面重力補償設備跟蹤研究[J].航天器環境工程,2012,29(1): 92-99 Cong Qiang.An investigation into gravity compensation equipment for space mechanisms[J].Spacecraft Environment Engineering,2012,29(1): 92-99
[2] 韋娟芳.衛星天線展開過程的零重力環境模擬設備[J].空間電子技術,2006(2): 29-32 Wei Juanfang.Gravity compensation equipment for satellite antenna[J].Space Electronic Technology,2006(2): 29-32
[3] Nobuaki N,Shoichi L,Yoshiaki T,et al.Design and experimental production of small deployable mesh type reflector antenna[C]//44thAIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference.Norfolk: AIAA,2013: 1581-1589
[4] Campbell D,Barrett R,Lake M,et al.Development of a novel,passively deployed solar array[C]//47thAIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference.Newport: AIAA,2006,2080-2087
[5] White G C,Xu Y.An active vertical-direction gravity compensation system[J].IEEE Transactions on Instrumentation and Measurement,1994,43(6): 786-792
[6] Sato Y,Ejiri A,Iida Y,et al.Micro-G emulation system using constant-tension suspension for a space manipulator[C]//Proceedings of the 1991 IEEE International Conference on Robotics and Automation.Sacramento,California: 1991: 1893-1900
[7] 姚燕生,梅濤,Ming Liu,等.懸掛式重力補償系統精密跟蹤方法[J].哈爾濱工業大學學報,2009,41(11): 205-208 Yao Yansheng,Mei Tao,Ming Liu,et al.Precision tracking method in suspension system for gravity compensation[J].Journal of Harbin Institute of Technology,2009,41(11): 205-208
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
