多用途飛船返回艙虛擬振動(dòng)試驗(yàn)研究
2015-12-23 06:49:14朱云飛楊艷靜岳志勇姜利祥黃建國(guó)焦子龍
航天器環(huán)境工程 2015年4期
朱云飛,楊艷靜,岳志勇,姜利祥,黃建國(guó),焦子龍
(1.北京衛(wèi)星環(huán)境工程研究所 可靠性與環(huán)境工程技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京 100094; 2.北京衛(wèi)星環(huán)境工程研究所,北京 100094)
0 引言
航天器的物理振動(dòng)試驗(yàn)在驗(yàn)證航天器設(shè)計(jì)方案、確保航天器質(zhì)量與可靠性方面發(fā)揮著重要的作用,但它存在以下局限[1]:1)航天器的精密性、昂貴性及振動(dòng)試驗(yàn)的風(fēng)險(xiǎn)性將導(dǎo)致一些高量級(jí)的振動(dòng)試驗(yàn)難以進(jìn)行,而且每增加一次振動(dòng)試驗(yàn),對(duì)于航天器正樣產(chǎn)品都是不利的;2)振動(dòng)試驗(yàn)的周期長(zhǎng),耗費(fèi)大。而虛擬振動(dòng)試驗(yàn)可以很好地彌補(bǔ)物理振動(dòng)試驗(yàn)的缺陷,其與物理振動(dòng)試驗(yàn)結(jié)合進(jìn)行,不僅可以提高航天器的環(huán)境可靠性,也可以縮短航天器的研制周期。
國(guó)外對(duì)虛擬振動(dòng)試驗(yàn)技術(shù)的研究已取得一些成果并將其應(yīng)用于工程實(shí)際[2-3]。NASA 的結(jié)構(gòu)環(huán)境強(qiáng)度實(shí)驗(yàn)室提出了航空航天產(chǎn)品測(cè)試的KBT(knowledge-based testing)方法并建立了VETO(virtual engineering for test optimization)軟件系統(tǒng)。ESA 和ESTEC 通過(guò)虛擬振動(dòng)試驗(yàn)來(lái)檢驗(yàn)航天器大型結(jié)構(gòu)的抗振能力。Airbus 公司開(kāi)發(fā)了飛機(jī)虛擬振動(dòng)臺(tái)系統(tǒng)并應(yīng)用于工程中,包括A380 飛機(jī)的襟翼系統(tǒng)、A400M 飛機(jī)的垂直尾翼虛擬試驗(yàn)和整機(jī)虛擬GVT 試驗(yàn)等。
我國(guó)也開(kāi)展了虛擬振動(dòng)試驗(yàn)技術(shù)的研究。2010年宋瓊等[4]建立了含動(dòng)圈-夾具-試件以及功放、控制器的模型并形成了初步的閉環(huán)虛擬振動(dòng)模型系統(tǒng),但還達(dá)不到工程應(yīng)用的程度。2013年上海衛(wèi)星裝備研究所與哈爾濱工業(yè)大學(xué)航天學(xué)院[5]聯(lián)合開(kāi)展了飛行器虛擬振動(dòng)試驗(yàn)平臺(tái)的構(gòu)建,研究了基于電動(dòng)振動(dòng)臺(tái)的機(jī)電聯(lián)合仿真試驗(yàn)技術(shù),分別建立了振動(dòng)臺(tái)機(jī)械系統(tǒng)、振動(dòng)控制系統(tǒng)、電磁作動(dòng)系統(tǒng)和試件柔性體的仿真模型,搭建了飛行器虛擬振動(dòng)試驗(yàn)平臺(tái),其中采用LMS 的Virtual Lab Motion 建立了振動(dòng)臺(tái)系統(tǒng)的多體動(dòng)力學(xué)模型和基于Imagine.Lab AMESim 的機(jī)械與電磁元件庫(kù)的振動(dòng)臺(tái)系統(tǒng)機(jī)電耦合模型。中國(guó)航天科工集團(tuán)防御技術(shù)研究院的范伯鈞等[6]用有限元軟件Nastran 建立了隨機(jī)振動(dòng)模塊并自編程序完成了基于最大值控制方式的導(dǎo)彈虛擬振動(dòng)環(huán)境試驗(yàn)的仿真,同時(shí)與實(shí)際試驗(yàn)結(jié)果進(jìn)行了對(duì)比,驗(yàn)證了此方法的可行性,為今后導(dǎo)彈的振動(dòng)試驗(yàn)設(shè)計(jì)和方案優(yōu)化打下了基礎(chǔ)。
北京衛(wèi)星環(huán)境工程研究所建立了整星虛擬振動(dòng)試驗(yàn)系統(tǒng)[7-8],該系統(tǒng)包含振動(dòng)臺(tái)的機(jī)械子系統(tǒng)、控制子系統(tǒng)、功放子系統(tǒng)、濾波及放大電路子系統(tǒng);并通過(guò)虛擬振動(dòng)試驗(yàn)工程化與應(yīng)用技術(shù)研究,將已經(jīng)取得的虛擬振動(dòng)試驗(yàn)技術(shù)成果轉(zhuǎn)化,建立了一套航天器虛擬振動(dòng)試驗(yàn)工程應(yīng)用軟件系統(tǒng),包含多系統(tǒng)聯(lián)合仿真分析模塊[9]、分析模型修正模塊、夾具分析仿真模塊和試驗(yàn)條件分析模塊。由于正在研制中的多用途飛船返回艙只要求進(jìn)行虛擬振動(dòng)環(huán)境試驗(yàn),所以利用此工程應(yīng)用軟件系統(tǒng)對(duì)返回艙進(jìn)行驗(yàn)收級(jí)、鑒定級(jí)振動(dòng)環(huán)境條件的虛擬試驗(yàn),并作出預(yù)示和評(píng)價(jià)。
1 有限元模型
1.1 多用途飛船返回艙模型
返回艙為圓錐側(cè)壁加球冠大底的結(jié)構(gòu)構(gòu)型,其結(jié)構(gòu)主體分為頂部、側(cè)壁、大底三部分,如圖1所示。
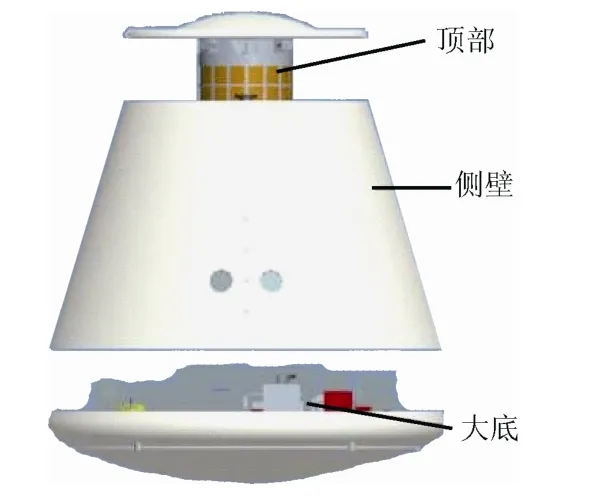
圖1 多用途飛船返回艙 Fig.1 The re-entry capsule of multi-purpose airship
頂部是返回艙的主要承力部件,需在返回段開(kāi)傘過(guò)程中抵抗嚴(yán)苛的沖擊載荷。頂部有傘艙、彈射器、GNSS 天線(xiàn)、黑障天線(xiàn)等設(shè)備。側(cè)壁包括防熱層、蜂窩板和壁板,其中防熱層有4 塊,并與蜂窩板粘貼在一起,再用螺接的方式與壁板上的筋相連接。側(cè)壁上主要安裝有姿態(tài)控制、氣動(dòng)測(cè)量功能的設(shè)備。大底是緩沖著陸沖擊載荷的關(guān)鍵部位,由內(nèi)外兩層蒙皮以及夾筋桁條組成。大底由金屬大底和防熱大底兩部分組成,其中金屬大底上主要安裝有信息管理、能源管理、回收、氣動(dòng)測(cè)量等功能的設(shè)備;防熱大底上布設(shè)了氣動(dòng)測(cè)量功能設(shè)備。
多用途飛船返回艙有限元模型共有66 693 個(gè)節(jié)點(diǎn)、71 956 個(gè)單元,如圖2所示。
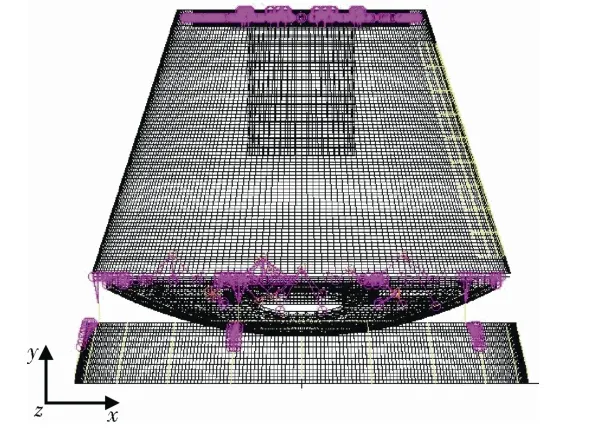
圖2 多用途飛船返回艙有限元模型 Fig.2 Finite element model of the re-entry capsule
1.2 振動(dòng)臺(tái)和夾具
40 t 雙振動(dòng)臺(tái)的垂直狀態(tài)有限元模型(圖3(a))包含6300 個(gè)節(jié)點(diǎn)、5388 個(gè)單元;水平狀態(tài)有限元模型(圖3(b))包含6596 個(gè)節(jié)點(diǎn)、5217 個(gè)單元。
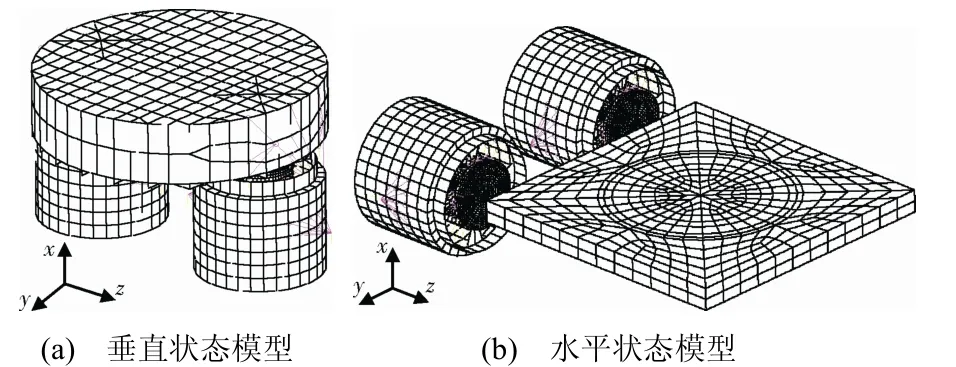
圖3 40 t 振動(dòng)臺(tái)有限元模型Fig.3 Finite element model of the 40 t shaker
多用途飛船返回艙夾具模型如圖4所示,包含1537 個(gè)節(jié)點(diǎn)、904 個(gè)單元。夾具基本參數(shù)見(jiàn)表1。夾具第1 階固有頻率大于100 Hz,滿(mǎn)足航天器振動(dòng)試驗(yàn)對(duì)夾具剛度基本要求。
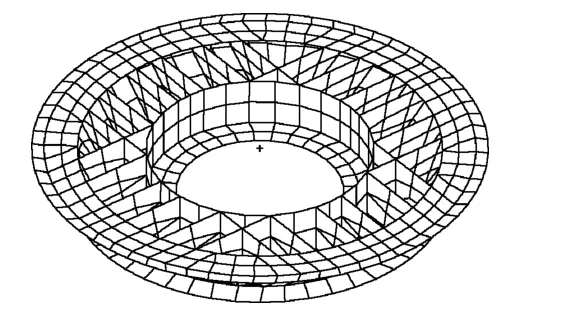
圖4 夾具有限元模型 Fig.4 Finite element model for the fixture
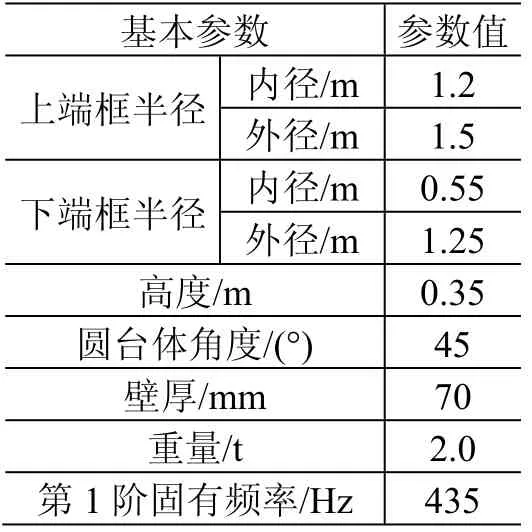
表1 夾具模型基本參數(shù) Table1 Parameters of the fixture
1.3 組合模型
將多用途飛船返回艙與夾具和振動(dòng)臺(tái)的有限元模型組合到一起形成虛擬振動(dòng)試驗(yàn)的分析模型(見(jiàn)圖5)。虛擬振動(dòng)試驗(yàn)時(shí),夾具和振動(dòng)臺(tái)臺(tái)面、返回艙與夾具的兩個(gè)端面均采用RBE2 單元固接。
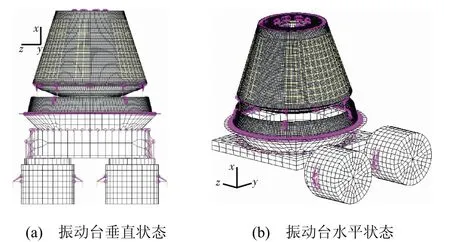
圖5 返回艙與夾具和振動(dòng)臺(tái)組合的有限元模型 Fig.5 The assembled finite element model of the virtual and horizontal shaker,the fixture and the re-entry capsule
2 阻尼系數(shù)的確定
阻尼是描述結(jié)構(gòu)能量耗散的數(shù)學(xué)模型。能量耗散由多種機(jī)制引起,如材料的黏性、外/內(nèi)摩擦、結(jié)構(gòu)/材料的非線(xiàn)性(塑性、間隙)等。結(jié)構(gòu)體系的真實(shí)阻尼特性很復(fù)雜和難于確定,因此阻尼的計(jì)算經(jīng)常基于動(dòng)力試驗(yàn)的結(jié)果。但由于多用途飛船返回艙不開(kāi)展物理振動(dòng)試驗(yàn),所以其阻尼的估計(jì)只能從已有的與其結(jié)構(gòu)相近的“神舟一號(hào)”返回艙試驗(yàn)結(jié)果中提取。

式中:Q為放大系數(shù);ζ為阻尼比。結(jié)構(gòu)的阻尼比ζ一般通過(guò)模態(tài)試驗(yàn)測(cè)試獲取(固有頻率、主振型、阻尼比等),其中最方便的方法是通過(guò)幅頻特性曲線(xiàn),采用半功率帶寬法獲得。在幅頻特性曲線(xiàn)的共振峰兩側(cè)可以找到幅值為峰值的0.707 倍的2 個(gè)點(diǎn),稱(chēng)為半功率點(diǎn)。在這兩點(diǎn)處,系統(tǒng)的振動(dòng)能量近似為共振時(shí)能量的一半。采用半功率帶寬法來(lái)確定兩個(gè)半功率點(diǎn)對(duì)應(yīng)的頻率f1和f2。在阻尼較小時(shí),f1和f2分別為
其中fn為共振頻率。由式(2)和式(3)可推出阻尼比

2.1 垂直方向阻尼系數(shù)
根據(jù)“神舟一號(hào)”返回艙垂直向振動(dòng)試驗(yàn)時(shí)主結(jié)構(gòu)上8 個(gè)測(cè)點(diǎn)(從上到下依次分布)的響應(yīng)曲線(xiàn),按半功率帶寬法估計(jì)其垂直方向的阻尼,取8 個(gè)測(cè)點(diǎn)平均值為0.13。其中測(cè)點(diǎn)A13~A16 位于III 象限桁條上,測(cè)點(diǎn)A9~A12 位于I、IV 象限間的桁條上。用“神舟一號(hào)”返回艙垂直方向的阻尼來(lái)近似多用途飛船返回艙垂直方向的阻尼。
2.2 水平方向阻尼系數(shù)
確定水平方向阻尼系數(shù)的方法與垂直方向相同,參照“神舟一號(hào)”水平方向試驗(yàn)數(shù)據(jù),取均值為0.142。用“神舟一號(hào)”返回艙水平方向的阻尼來(lái)近似多用途飛船返回艙水平方向的阻尼。
3 多用途飛船返回艙及帶夾具底部固支模態(tài)
多用途飛船返回艙設(shè)計(jì)完成后,開(kāi)展了虛擬振動(dòng)仿真分析。因大底在一階共振區(qū)響應(yīng)遠(yuǎn)超組件級(jí)試驗(yàn)準(zhǔn)許的范圍,必須修正原來(lái)的設(shè)計(jì)方案。經(jīng)過(guò)多次迭代修改后的模型稱(chēng)之為模型二,虛擬振動(dòng)試驗(yàn)前的設(shè)計(jì)方案稱(chēng)為模型一。多用途飛船的這兩種構(gòu)型在如下兩種工況下的模態(tài)分析結(jié)果見(jiàn)表2和表3:首先計(jì)算了多用途飛船返回艙底部固支的模 態(tài),之后計(jì)算了返回艙和夾具連接之后的夾具底部固支的模態(tài)。其中y向彎曲、z向彎曲和垂直向一階在振動(dòng)過(guò)程中起決定作用。對(duì)比分析后可知,夾具對(duì)返回艙固有頻率的影響很小,夾具的一階共振頻率為435 Hz,夾具設(shè)計(jì)合理。

表2 修正前多用途飛船返回艙及帶夾具主要模態(tài)(模型一) Table2 The natural modes of the reentry capsule uninstalled/ installed on the fixture before modification(model 1)

表3 修正后多用途飛船返回艙及帶夾具主要模態(tài)(模型二) Table3 The natural modes of the reentry capsule uninstalled/ installed on the fixture after modification (model 2)
4 虛擬正弦掃描振動(dòng)試驗(yàn)分析
4.1 系統(tǒng)級(jí)試驗(yàn)條件
多用途飛船正弦掃描振動(dòng)試驗(yàn)條件如表4所示。
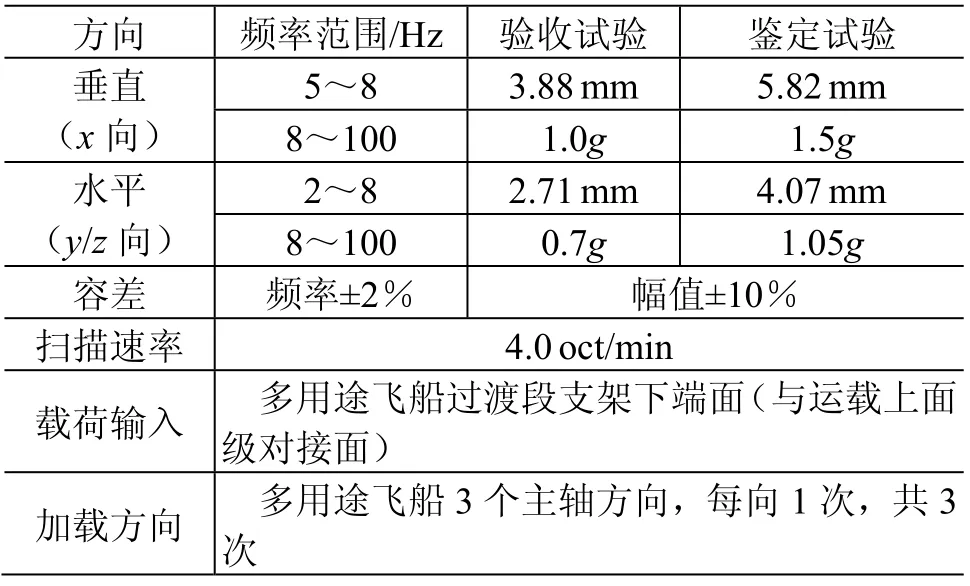
表4 低頻正弦掃描振動(dòng)試驗(yàn)條件 Table4 Conditions for low frequency sine scanning vibration test
虛擬振動(dòng)試驗(yàn)開(kāi)展了特征級(jí)0.2g、驗(yàn)收級(jí)、鑒定級(jí)試驗(yàn)。特征級(jí)振動(dòng)試驗(yàn)的目的是為了調(diào)整和優(yōu)化控制參數(shù),同時(shí)為預(yù)示高量級(jí)振動(dòng)試驗(yàn)條件做準(zhǔn)備。
虛擬振動(dòng)試驗(yàn)控制點(diǎn)取在夾具與返回艙連接界面4 個(gè)象限點(diǎn)處。垂直向和水平向的控制壓縮比均設(shè)置為0.8。由于垂直向振動(dòng)試驗(yàn)都是從5 Hz 開(kāi)始,并且返回艙的一階基頻遠(yuǎn)遠(yuǎn)高于2 Hz,所以垂直向虛擬振動(dòng)試驗(yàn)頻率取5~100 Hz,水平向頻率取2~100 Hz;均采用對(duì)數(shù)掃描,880 個(gè)掃頻點(diǎn)。驗(yàn)收級(jí)與鑒定級(jí)的控制點(diǎn)、控制參數(shù)和掃頻參數(shù)相同。
4.2 限幅條件
限幅控制點(diǎn)暫定在軌道艙前端框。I、II 象限線(xiàn)各布置1 個(gè)三向加速度傳感器作為限幅控制點(diǎn),驗(yàn)收級(jí)響應(yīng)限幅控制條件暫定為x向6g,y、z向4.2g。
4.3 組件級(jí)試驗(yàn)條件
大底、頂部和側(cè)壁的組件級(jí)試驗(yàn)條件分別見(jiàn)表5和表6。
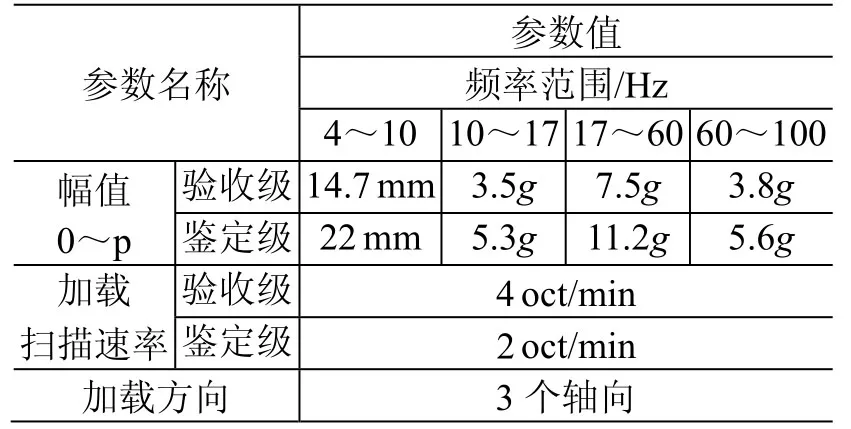
表5 大底區(qū)組件試驗(yàn)條件 Table5 Test conditions for the bottom zone of the capsule
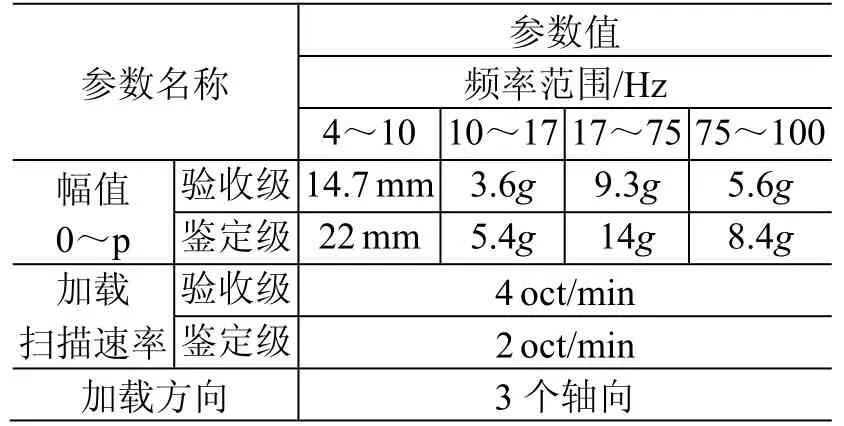
表6 頂部和側(cè)壁組件試驗(yàn)條件 Table6 Test conditions for the top zone and lateral zone of the capsule
4.4 加速度測(cè)量點(diǎn)
加速度測(cè)點(diǎn)的布置為:返回艙34 個(gè),其中傘艙1 個(gè),過(guò)渡框上4 個(gè),側(cè)壁壁板上12 個(gè),大底上17 個(gè)。虛擬振動(dòng)試驗(yàn)時(shí)對(duì)所有測(cè)點(diǎn)進(jìn)行加速度輸出。這里僅考慮返回艙主結(jié)構(gòu)關(guān)鍵部位的4 個(gè)測(cè)點(diǎn),測(cè)點(diǎn)位置和有限元模型上對(duì)應(yīng)位置的節(jié)點(diǎn)編號(hào)如表7所示。

表7 響應(yīng)點(diǎn)結(jié)果提取位置 Table7 Node numbers for output
4.5 試驗(yàn)結(jié)果
虛擬振動(dòng)試驗(yàn)垂直向(x向)驗(yàn)收級(jí)控制參考譜如圖6所示。通過(guò)對(duì)比可知,輸入?yún)⒖伎刂谱V與虛擬試驗(yàn)控制譜吻合很好,只是在共振處稍微有點(diǎn)偏離,偏差在±5%以?xún)?nèi)。
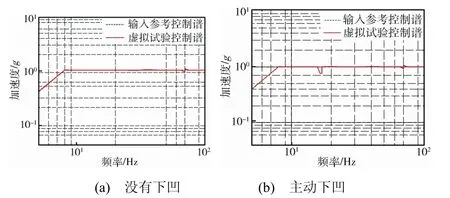
圖6 虛擬振動(dòng)試驗(yàn)控制曲線(xiàn) Fig.6 Virtual vibration control curves
第一次虛擬振動(dòng)試驗(yàn)完成之后,結(jié)果顯示返回艙大底區(qū)的多個(gè)測(cè)點(diǎn)在垂直向響應(yīng)均超過(guò)了組件級(jí)試驗(yàn)條件。這是由于在10~20 Hz 區(qū)間為返回艙垂直向一階共振區(qū)(一階共振頻率為18.99 Hz),所以大底區(qū)測(cè)點(diǎn)的響應(yīng)很大。為此,我們改進(jìn)了設(shè)計(jì)方案。在大底區(qū)預(yù)留了2 個(gè)較大的出口,同時(shí)加固了大底與返回艙之間的連接,使得修正后的垂直向一階頻率增大為33.78 Hz,從而使得組件級(jí)試驗(yàn)條件得到滿(mǎn)足。圖7~圖9分別為應(yīng)急數(shù)據(jù)記錄器b 的安裝支架處在x,y,z三個(gè)方向上的響應(yīng)結(jié)果。
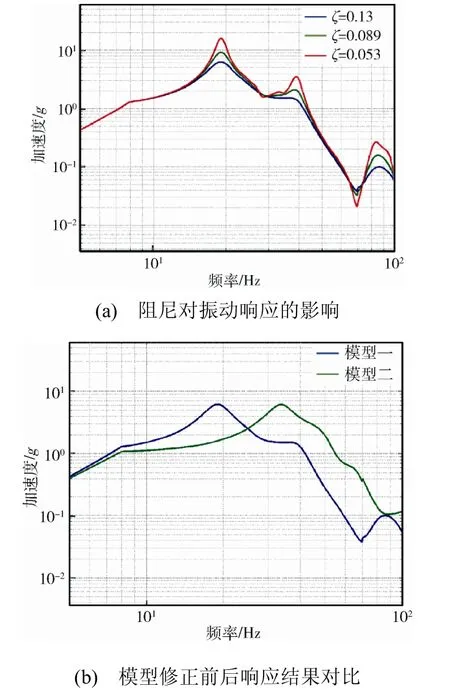
圖7 應(yīng)急數(shù)據(jù)記錄器b 安裝支架處的垂直x 向響應(yīng) 結(jié)果對(duì)比 Fig.7 Comparison of the responses at the installation point of the data recorder b in a contingency in x direction
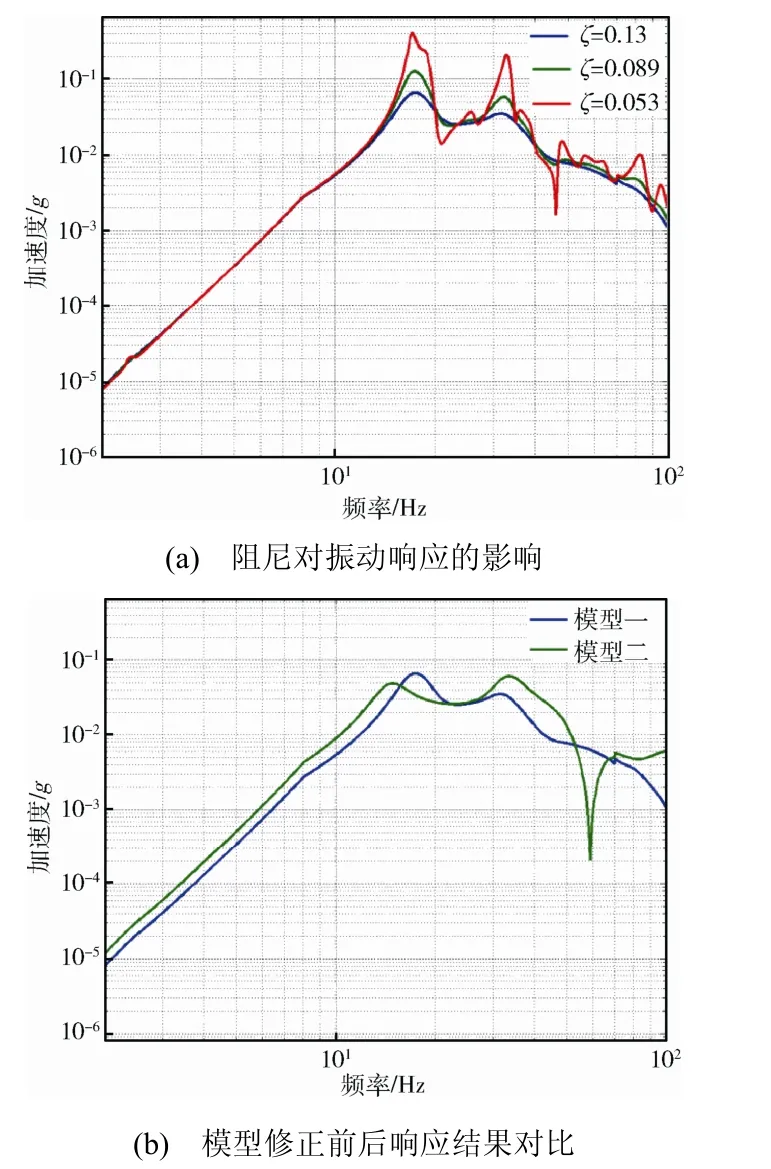
圖8 應(yīng)急數(shù)據(jù)記錄器b 安裝支架處的水平y(tǒng) 向響應(yīng) 結(jié)果對(duì)比 Fig.8 Comparison of the response at the installation point of the data recorder b in a contingency in y direction,(a)the damping effect,and (b)the result comparison between model 1 and model 2
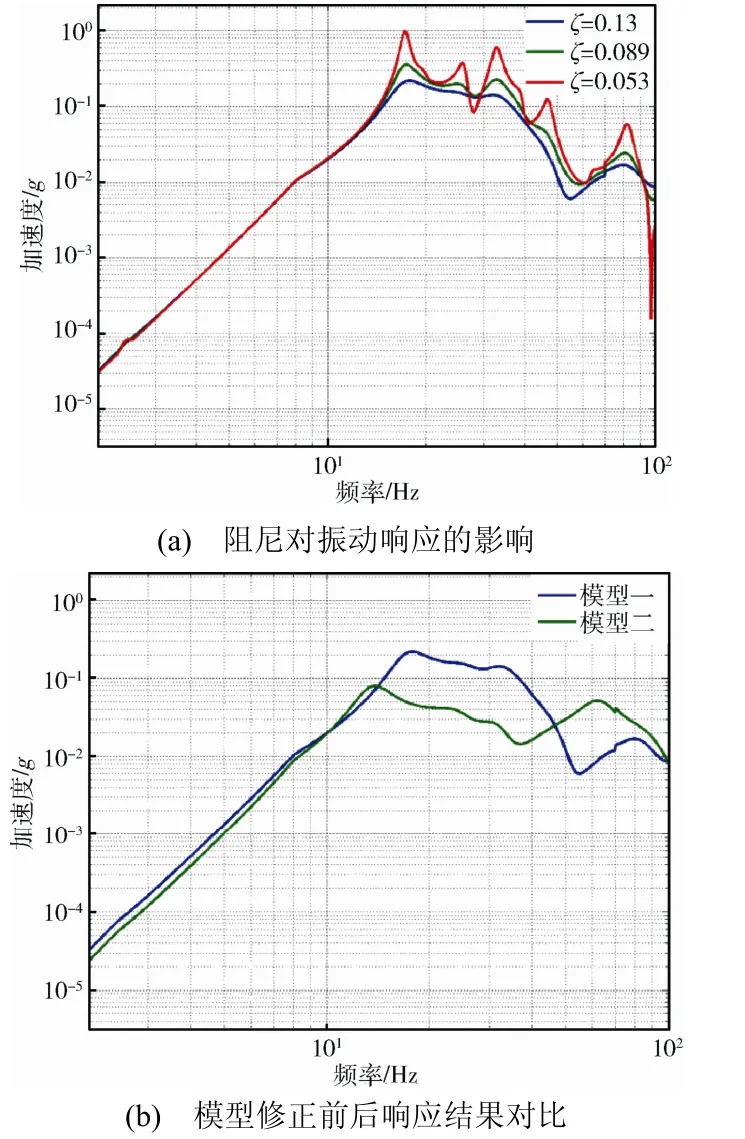
圖9 應(yīng)急數(shù)據(jù)記錄器b 安裝支架處的水平z 向響應(yīng) 結(jié)果對(duì)比 Fig.9 Comparison of the response at the installation point of the data recorder b in a contingency in z direction,(a)the damping effect,and (b)the result comparison between model 1 and model 2
其中,從圖7(a)~圖9(a)可以明顯看出不同阻尼對(duì)于振動(dòng)響應(yīng)幅值的影響;圖7(b)~圖9(b)為模型修正前后的響應(yīng)結(jié)果對(duì)比,可看出模型修正后不僅使得垂直向的振動(dòng)滿(mǎn)足組件級(jí)條件,同時(shí)也降低了水平向振動(dòng)響應(yīng)幅值。
虛擬正弦振動(dòng)試驗(yàn)結(jié)果分析如下:
1)垂直向驗(yàn)收級(jí)振動(dòng)試驗(yàn)時(shí),各個(gè)測(cè)點(diǎn)響應(yīng)均滿(mǎn)足了組件級(jí)試驗(yàn)條件和響應(yīng)限幅條件,無(wú)須下凹,其中測(cè)點(diǎn)19924 在33.99 Hz 的響應(yīng)最大,為6.64g。
2)垂直向鑒定級(jí)振動(dòng)試驗(yàn)時(shí),各個(gè)測(cè)點(diǎn)響應(yīng)均滿(mǎn)足組件級(jí)試驗(yàn)條件和響應(yīng)限幅條件,無(wú)須下凹,其中測(cè)點(diǎn)19924 在33.99 Hz 的響應(yīng)最大,為9.96g。
3)水平向驗(yàn)收級(jí)振動(dòng)試驗(yàn)時(shí),各個(gè)測(cè)點(diǎn)響應(yīng)均滿(mǎn)足響應(yīng)限幅和組件級(jí)試驗(yàn)條件,無(wú)須下凹。以水平z向振動(dòng)試驗(yàn)為例,測(cè)點(diǎn)64684 在13.41 Hz(z向一階彎曲共振頻率)的響應(yīng)最大,為3.45g。
4)水平向鑒定級(jí)振動(dòng)試驗(yàn)時(shí),各個(gè)測(cè)點(diǎn)響應(yīng)均滿(mǎn)足響應(yīng)限幅和組件級(jí)試驗(yàn)條件,無(wú)須下凹。以水平z向振動(dòng)試驗(yàn)為例,測(cè)點(diǎn)64684 在13.41 Hz(z向一階彎曲共振頻率)的響應(yīng)最大,為5.17g。
5)垂直向驗(yàn)收級(jí)振動(dòng)試驗(yàn)時(shí),過(guò)渡段上端框火工鎖附近、側(cè)壁下端框火工鎖附近的應(yīng)力比較大,其中側(cè)壁下端框火工鎖附近I、IV 象限間單元54682 的應(yīng)力最大,為30.3 MPa。
6)水平y(tǒng)向驗(yàn)收級(jí)振動(dòng)試驗(yàn)時(shí),過(guò)渡段上端框火工鎖附近、側(cè)壁下端框火工鎖附近的應(yīng)力比較大,其中過(guò)渡段上端框火工鎖附近III、IV 象限間單元21416 的應(yīng)力最大,為41.17 MPa。
7)水平z向驗(yàn)收級(jí)振動(dòng)試驗(yàn)時(shí),過(guò)渡段上端框火工鎖附近、側(cè)壁下端框火工鎖附近的應(yīng)力比較大,其中過(guò)渡段上端框火工鎖附近I、II 象限間單元21560 的應(yīng)力最大,為53.03 MPa。
8)鑒定級(jí)振動(dòng)試驗(yàn)時(shí),最大應(yīng)力分布與驗(yàn)收級(jí)的規(guī)律基本一致。x、y、z方向的應(yīng)力最大值分別為45.46 MPa、61.75 MPa、79.5 MPa。
5 虛擬隨機(jī)振動(dòng)試驗(yàn)分析
在返回艙結(jié)構(gòu)設(shè)計(jì)過(guò)程中進(jìn)行隨機(jī)振動(dòng)仿真分析,可以有效預(yù)示結(jié)構(gòu)關(guān)鍵部位在力學(xué)環(huán)境條件下的響應(yīng)。飛船上各關(guān)鍵部位響應(yīng)的方均根值可以用來(lái)衡量隨機(jī)振動(dòng)的劇烈程度。我們將通過(guò)有限元計(jì)算,開(kāi)展垂直向和水平向隨機(jī)激勵(lì)下飛船的振動(dòng)分析,考核飛船經(jīng)受此動(dòng)力學(xué)環(huán)境的能力。
航天器隨機(jī)振動(dòng)試驗(yàn)中結(jié)構(gòu)的振動(dòng)通常假定為線(xiàn)性、平穩(wěn)、各態(tài)歷經(jīng)隨機(jī)物理過(guò)程。因而,隨機(jī)振動(dòng)的響應(yīng)可以通過(guò)頻響函數(shù)計(jì)算。

式中:uj代表響應(yīng)變量;Hja(ω)為傳遞函數(shù);Oa(ω)表示隨機(jī)激勵(lì)。

其式中:Sj(ω)為響應(yīng)uj的功率譜密度;Sa(ω)為 輸入功率譜密度。若多個(gè)激勵(lì)互不相關(guān),則系統(tǒng)的總響應(yīng)功率譜密度為各個(gè)激勵(lì)引起的系統(tǒng)響應(yīng)功率譜密度之和,即為

若多個(gè)激勵(lì)通過(guò)互功率譜密度Sab相關(guān),則總的響應(yīng)功率譜密度為

其中,H*jb(ω)為傳遞函數(shù)的共軛。
返回艙隨機(jī)振動(dòng)環(huán)境以基礎(chǔ)隨機(jī)激勵(lì)的加速度功率譜密度形式給出,在垂直向和水平向上分別作用于星箭安裝界面。我們采用了NASA 的GEVS標(biāo)準(zhǔn)給出的最嚴(yán)格的隨機(jī)振動(dòng)剖面,如圖10所示,垂直向(x向)和水平向(y,z向)的頻率計(jì)算范圍分別為5~100 Hz 和2~100 Hz。
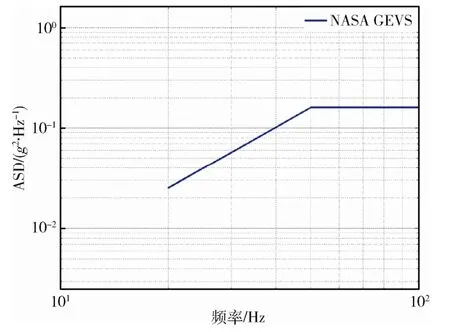
圖10 隨機(jī)激勵(lì)加速度功率譜密度曲線(xiàn) Fig.10 Random acceleration spectral density curve
隨機(jī)振動(dòng)過(guò)程中,任意時(shí)刻多種頻率成分的激勵(lì)同時(shí)作用在返回艙結(jié)構(gòu)上。一般用方均根或者累計(jì)方均根等統(tǒng)計(jì)量來(lái)表征返回艙結(jié)構(gòu)的隨機(jī)振動(dòng)。
返回艙主結(jié)構(gòu)關(guān)鍵部位的響應(yīng)見(jiàn)圖11~圖13。其中如表7所示的4 個(gè)節(jié)點(diǎn)(16297、90233、94446以及35562)上的隨機(jī)振動(dòng)響應(yīng)需重點(diǎn)關(guān)注。隨機(jī)響應(yīng)的功率譜密度表示隨機(jī)振動(dòng)在各頻率成分的能量分布,見(jiàn)式(9)。隨機(jī)響應(yīng)的方均根表征隨機(jī)振動(dòng)的統(tǒng)計(jì)特性,見(jiàn)式(10)。隨機(jī)響應(yīng)的累計(jì)方均根值則表示隨機(jī)振動(dòng)的頻率成分,見(jiàn)式(11)。
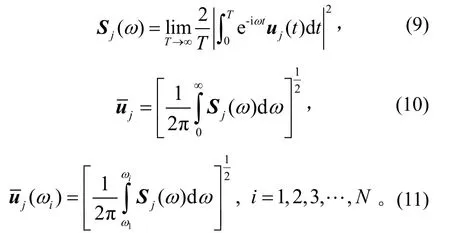
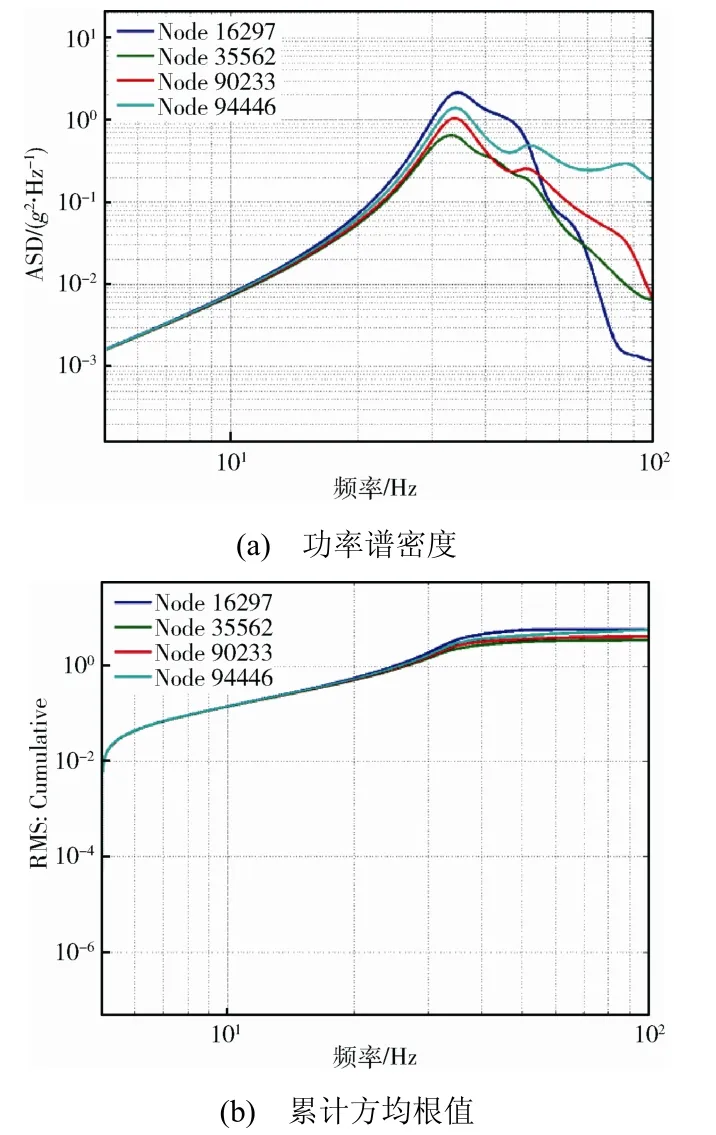
圖11 返回艙主結(jié)構(gòu)4 個(gè)關(guān)鍵部位x 向隨機(jī)振動(dòng)響應(yīng) Fig.11 Random vibration responses in x direction at four key points of the capsule
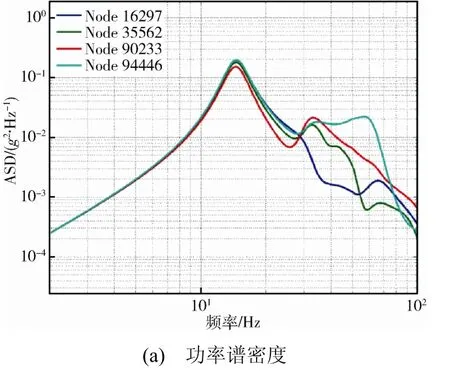
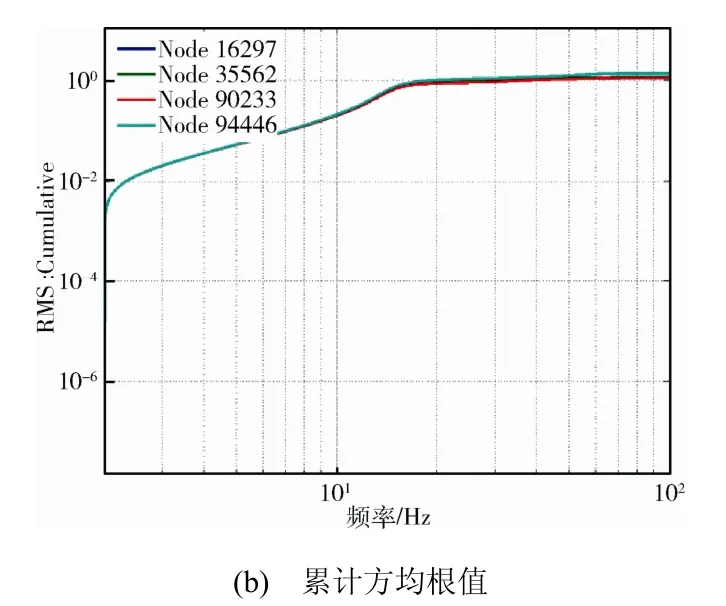
圖12 返回艙主結(jié)構(gòu)4 個(gè)關(guān)鍵部位y 向隨機(jī)振動(dòng)響應(yīng) Fig.12 Random vibration responses in y direction at four key points on the capsule
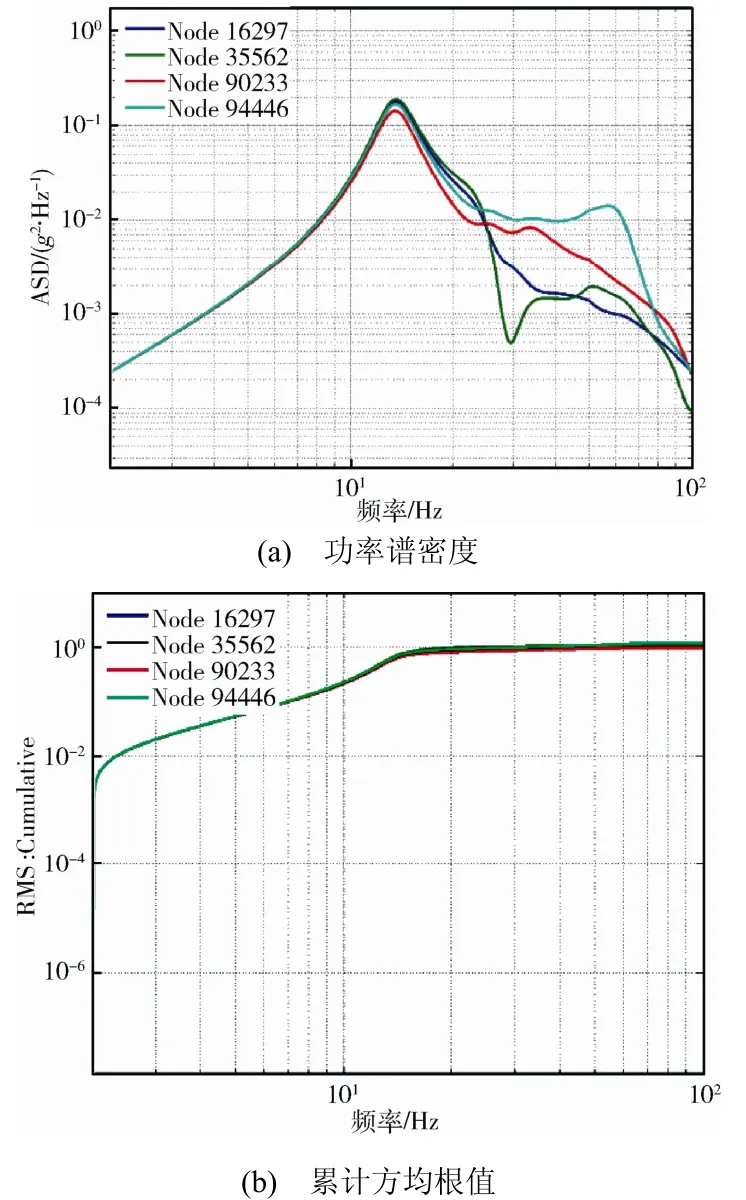
圖13 返回艙主結(jié)構(gòu)4 個(gè)關(guān)鍵部位z 向隨機(jī)振動(dòng)響應(yīng) Fig.13 Random vibration responses in z direction at four key points on main structure of the capsule
由圖11可知返回艙結(jié)構(gòu)的垂直向隨機(jī)振動(dòng)響應(yīng)以50 Hz 以下的頻率成分為主,而水平向以30 Hz以下為主(見(jiàn)圖12和圖13)。傘艙下端面中心點(diǎn)(節(jié)點(diǎn)94446)的響應(yīng)在一階主頻與100 Hz 之間的響應(yīng)比其他點(diǎn)要大。
表8列出了垂直向和水平向隨機(jī)激勵(lì)作用下返回艙主結(jié)構(gòu)關(guān)鍵部位的隨機(jī)響應(yīng),其中“x,x”表示x向激勵(lì)、x向響應(yīng),以此類(lèi)推。可以看出,垂直向隨機(jī)激勵(lì)引起的響應(yīng)較大,放大倍數(shù)可達(dá)3.7;而水平向較小,放大倍數(shù)均在1.0 左右。
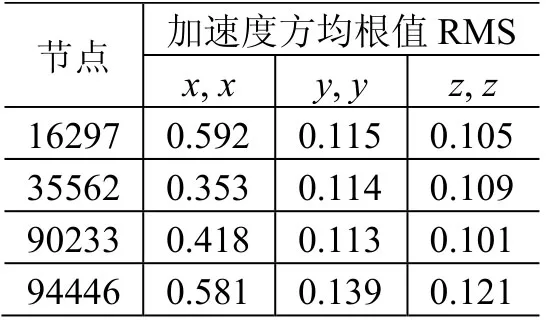
表8 返回艙主結(jié)構(gòu)4 個(gè)關(guān)鍵部位加速度響應(yīng) Table8 The acceleration responses at four key points on main structure of the capsule
返回艙結(jié)構(gòu)的垂直向隨機(jī)響應(yīng)以50 Hz 以下的頻率成分為主,而水平向以30 Hz 以下的響應(yīng)為主。
6 結(jié)束語(yǔ)
在北京衛(wèi)星環(huán)境工程研究所研發(fā)的虛擬振動(dòng)試驗(yàn)系統(tǒng)的基礎(chǔ)上,開(kāi)展了多用途飛船返回艙的虛擬正弦掃頻試驗(yàn)和隨機(jī)振動(dòng)試驗(yàn),試驗(yàn)的控制誤差在±5%以?xún)?nèi),符合多用途飛船返回艙虛擬振動(dòng)試驗(yàn)技術(shù)要求。在虛擬試驗(yàn)中,采用半功率帶寬法并結(jié)合歷史數(shù)據(jù)確定了振動(dòng)阻尼參數(shù),完成了垂直向(x向)和水平向(y,z向)激勵(lì)下返回艙結(jié)構(gòu)的振動(dòng)響應(yīng)分析,考核了返回艙經(jīng)受動(dòng)力學(xué)環(huán)境的能力。
由于多用途飛船返回艙研制任務(wù)的需要,將不開(kāi)展物理振動(dòng)試驗(yàn),虛擬振動(dòng)試驗(yàn)是唯一的結(jié)構(gòu)振動(dòng)考核方案。本研究為多用途飛船返回艙的設(shè)計(jì)和優(yōu)化提供了依據(jù)。
致謝
特別感謝向樹(shù)紅研究員、馮咬齊研究員、劉闖研究員、劉明輝高級(jí)工程師對(duì)本人的指導(dǎo)和幫助。
(References)
[1] 柯受全,金恂叔.衛(wèi)星環(huán)境工程和模擬試驗(yàn)[M].北京: 宇航出版社,1996: 23-27
[2] Ricci S,Peeters B,Debille J.Virtual shaker testing: a novel approach for improving vibration test performance[C]∥Proceedings of ISMA2008.Leuven: Katholieke University Leuven,2008: 1767-1782
[3] Betts E J,Vansant K,Paulson C.Smart testing using virtual vibration testing[C]∥Proceedings of the 24thAerospace Testing Seminar.Manhattan Beach,2008: 103-111
[4] 宋瓊,范宣華,胡勇.基于MATLAB 和有限元的虛擬振動(dòng)試驗(yàn)系統(tǒng)[J].裝備環(huán)境工程,2010,7(6): 9-12 Song Qiong,Fan Xuanhua,Hu Yong.Virtual vibration test system based on MATLAB and FEA[J].Equipment Environmental Engineering,2010,7(6): 9-12
[5] 劉源,董立珉,孔憲仁,等.飛行器虛擬振動(dòng)試驗(yàn)平臺(tái)構(gòu)建[J].光學(xué)精密工程,2013,21(5): 1258-1263 Liu Yuan,Dong Limin,Kong Xianren,et al.Construction of virtual vibration testing platform for spacecraft[J].Optics and Precision Engineering,2013,21(5): 1258-1263
[6] 范伯鈞,劉煒.虛擬振動(dòng)環(huán)境試驗(yàn)在導(dǎo)彈研制中的應(yīng)用[J].現(xiàn)代防御技術(shù),2007,35(6): 51-54 Fan Bojun,Liu Wei.Application of virtual vibration environment test on the development of missile[J].Modern Defence Technology,2007,35(6): 51-54
[7] 劉闖,向樹(shù)紅,馮咬齊.衛(wèi)星虛擬振動(dòng)試驗(yàn)系統(tǒng)研究[J].航天器環(huán)境工程,2009,26(3): 248-253 Liu Chuang,Xiang Shuhong,Feng Yaoqi.Virtual vibration test system for satellite[J].Spacecraft Environment Engineering,2009,26(3): 248-253
[8] 張正平,邱吉寶,王建民,等.航天器結(jié)構(gòu)虛擬動(dòng)態(tài)試驗(yàn)技術(shù)新進(jìn)展[J].振動(dòng)工程學(xué)報(bào),2008,21(3): 209-221 Zhang Zhengping,Qiu Jibao,Wang Jianmin,et al.Progress on virtual dynamic test techniques for space vehicles[J].Journal of Vibration Engineering,2008,21(3): 209-221
[9] MSC Software Corporation.Nastran user’s manual[G],2004
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
計(jì)算物理(2014年2期)2014-03-11 17:01:44
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
