一種快速連接的變剛度關節
2015-12-05 05:54:51王云慶張旭龍
機械工程與自動化 2015年6期
關鍵詞:設計
王云慶,陳 浩,張旭龍
(北京機電工程總體設計部,北京 100854)
一種快速連接的變剛度關節
王云慶,陳 浩,張旭龍
(北京機電工程總體設計部,北京 100854)
提供了一種可變剛度的快速連接機構,它安裝在預先設計好的剛性關節末端。可變剛度功能實現關節之間的柔性連接和控制,快速連接功能提高了部件間的裝配效率。綜合這兩大功能,剛性關節改造為可快速連接的變剛度柔性關節。為了實現模塊化的生產和使用,對變剛度和快速連接兩大功能進行了集成設計。
關節;快速連接;變剛度
0 引言
傳統的工業制造環節中,外部環境是已知的,機器人的動作依靠精確的位置控制實現,因而工業機器人各部分之間多采用剛性連接[1]。但是,當機器人末端執行器與周圍環境發生接觸時,再精確的位置控制也會顯得不足。
對于柔性連接,一般是將彈性驅動器安裝于機器人關節處,提供一種具有低輸出的阻尼摩擦,進而完成精確的力控制。從20世紀80年代初起,美國麻省理工學院的Pratt教授便開始對彈性驅動器展開研究[2],后來的研究者們也提出了各種不同的方案,如:Sensinger設計了一種旋轉型無回差機構[3];Sugar設計了一種并聯機構[4];Sulzer基于輪繩結構對驅動器進行了設計[5];Chew用阻尼環節替換彈性環節進行設計[6]。但是,這些研究的基本原理都是一致的,都是在彈性驅動器的輸出端串聯上一個可以觀測的彈性裝置。
對于變剛度機構,國內研究多限于剛性機構的柔順控制,而歐盟的VICTORS、SMERobot、PHRIENDS等皆在努力研制下一代能直接與人接觸交往的安全性機器人。如VICTORS項目組提出的FS-Joint、VS-Joint、AWAS、VSA等變剛度的彈性機構[7-10],具有動態性能很強的可變阻抗系統。本文中的變剛度機構是基于已有的機械臂系統實驗平臺,設計了一種安裝于兩種關節模塊末端的可變剛度的快速連接機構,使關節能夠集成快速連接和可變剛度這兩個功能。
1 快速連接變剛度關節方案設計
如圖1所示,快速連接的變剛度關節主要由電機、導軌、電機固定盤、錐子圓盤、彈簧片、快速連接部件a、卡位頂錐、快速連接部件b、對接盤、聯軸器、絲杠螺桿、螺母座、環形彈簧、卡位螺母等零件組成。
電機與電機固定盤、螺母座與錐子圓盤、彈簧片與錐子圓盤、快速連接部件a與快速連接部件b之間都是通過螺絲釘固定;設計的導軌將電機固定盤、錐子圓盤和快速連接部件b串接在一起,導軌通過螺紋固定在快速連接部件a上,卡位螺母將導軌固定在電機固定盤上,錐子圓盤可在導軌上往復滑動;快速連接部件a和快速連接部件b結合安裝,將卡位頂錐和環形彈簧固定在快速連接部件a的圓孔槽中;接盤的設計能夠實現對快速連接部件的引導以及對彈簧片插入彈簧片卡槽的引導。
2 機構的運動過程
2.1 機構快速連接過程
圖2為機構的快速連接過程。
如圖2(a)所示,快速連接之前,卡位頂錐完全位于快速連接部件a內部,環形彈簧為無形變自然狀態。如圖2(b)所示,快速連接過程中,電機驅使錐子圓盤向遠離電機固定盤的方向運動,錐子圓盤上的大錐子逐漸將卡位頂錐頂出,頂出距離小于或等于斜引導槽的厚度,此時電機停機,對接盤向上套接在快速連接部件的外側,卡位頂錐外端的頂出部分經斜引導槽引導后在豎引導槽內向下運動,當卡位頂錐運動到豎引導槽內時,彈簧片進入對接盤的彈簧片卡槽。如圖2(c)所示,當卡位頂錐運動到對接盤上卡位槽的對應位置時,啟動電機,錐子圓盤繼續向下運動,大錐子的圓錐面繼續將卡位頂錐頂出,直到卡位頂錐的頂出距離大于豎引導槽的厚度,電機停機,完成整個快速連接。
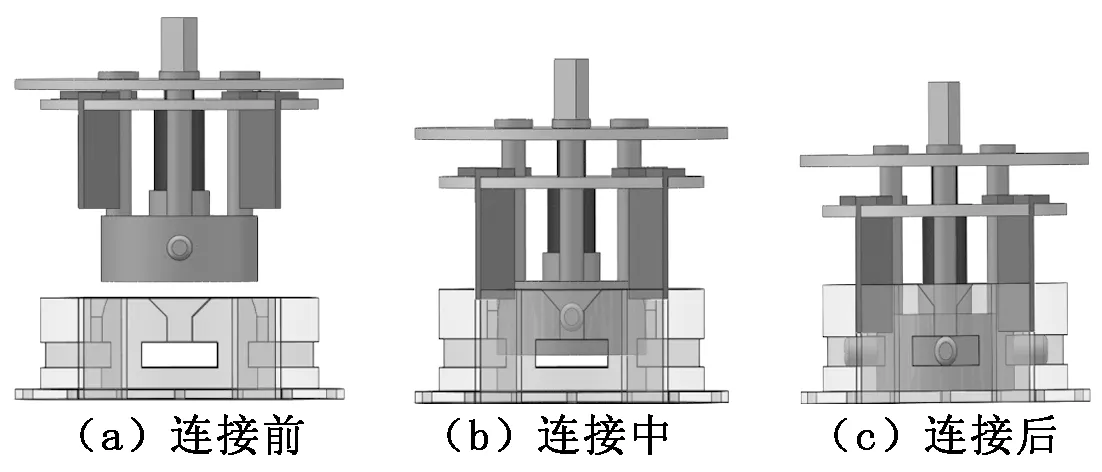
圖2 機構的快速連接過程
2.2 機構快速分離過程
當需要分離兩個部分時,電機反向運動,帶動錐子圓盤向電機固定盤的方向運動,此時卡位頂錐在環形彈簧的作用下復位,卡位頂錐逐漸離開卡位槽,此時對接盤和快速連接部件b可以分離,從而解除連接。
2.3 機構變剛度過程
電機得到相應的信號,驅動錐子圓盤往復運動,從而改變彈簧片與彈簧片卡槽的相對位置,達到變剛度的目的。錐子圓盤往復運動的過程中需保證卡位頂錐一直位于卡位槽內且彈簧片一直位于彈簧片卡槽內。3 計算驗證
通過改變彈簧片與彈簧片卡槽的相對位置實現可變剛度功能。由材料力學公式可得彈簧片撓度w的表達式為:
(1)
其中:a為彈簧片的寬度;b為彈簧片的厚度;c為彈簧片的初態可變長度;F為每個彈簧片的受力;E為彈簧片的彈性模量;x為彈簧片相對彈簧片卡槽的移動距離。
彈簧片的轉動角度α為:
(2)
其中:d為彈簧片中心繞軸心的旋轉半徑。
定義廣義剛度K為:

(3)
其中:M為兩個連接模塊間的扭矩。
將式(2)中的轉動角度α代入式(3)得:
(4)
根據推導出的變剛度公式(4),設定11個x取值點,可得剛度值變化曲線,如圖3所示。
4 仿真分析
4.1 應力分析
彈簧片是可變剛度關節的核心零件,其在與關節所連接的兩模塊間發生相對扭轉時會承受應力與應變。設計的彈簧片尺寸參數為:a=20 mm,b=3 mm,變剛度階段最大實際有效長度為20 mm。應用SolidWorks Simulation軟件建立彈簧片三維模型材料選擇65彈簧鋼,夾具選擇在彈簧片與圓錐盤的安裝面,載荷選擇278 N,作用點在距離彈簧片安裝面20 mm處。
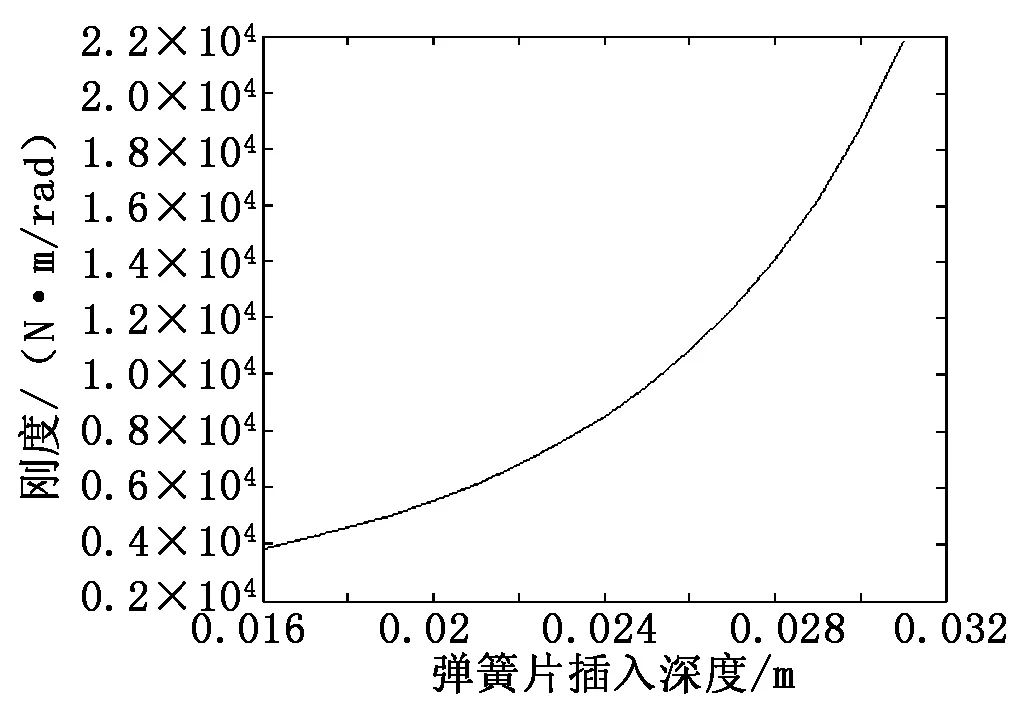
圖3 剛度變化曲線圖
彈簧片的應力分析結果如圖4所示。最大應力為250.234 MPa,而材料的屈服力為620.422 MPa,因此強度滿足設計要求。
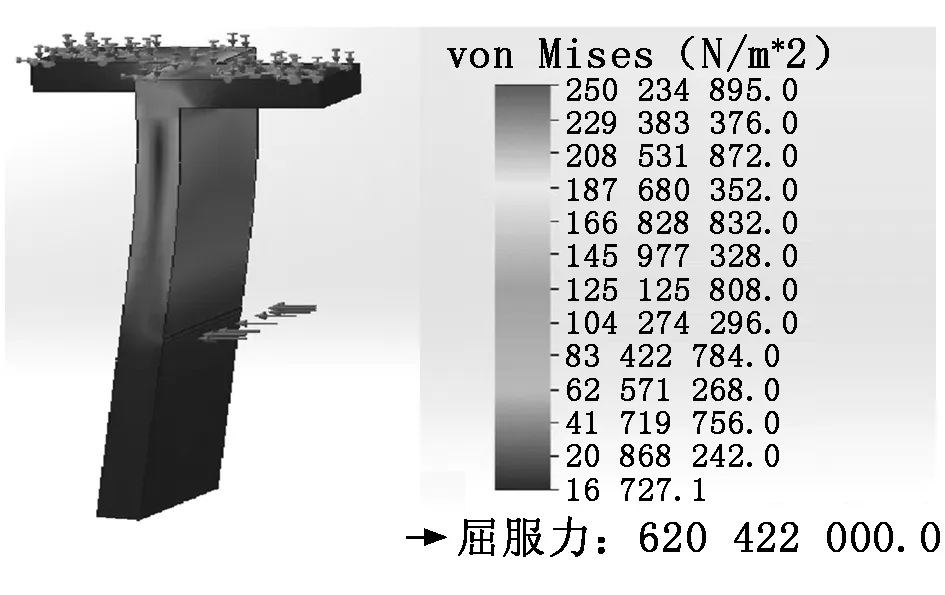
圖4 彈簧片應力云圖
彈簧片的應變分析結果如圖5所示。力作用點的撓度在0.515 mm~0.617 mm之間,由于需要保證關節模塊相對旋轉±5°以內,即實際撓度應小于設計的最大撓度,設計的最大撓度w約為3.925 mm。因此仿真的應變結果滿足設計要求。
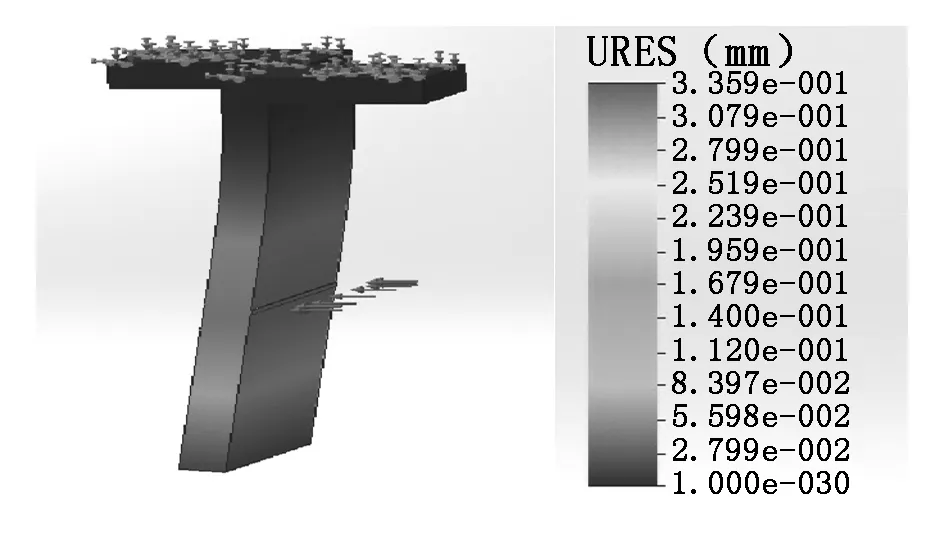
圖5 彈簧片應變云圖
4.2 動力學仿真
將設計好的三維模型導入ADAMS,設定相應的配置參數,并添加相應的運動副和所需的驅動,如圖6所示。
運動學仿真過程中,采用STEP函數,其使用格式為:STEP(x, x0, h0, x1, h1)。其中x為自變量,x0為自變量的STEP函數開始值,x1為自變量的STEP函數結束值,h0為STEP函數的初始值,h1為STEP函數的最終值。在STEP函數的驅動下,模型的運動如圖7所示。Step 1為初始姿態;Step 2為快速連接前將卡位頂錐頂出用于引導;Step 3為變剛度彈簧片與卡槽對準;Step 4為快速連接過程開始;Step 5為快速連接過程完成;Step 6為剛度調節過程。
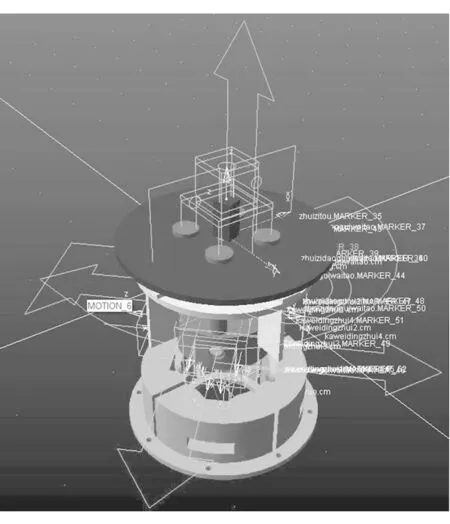
圖6 添加運動副和驅動的模型
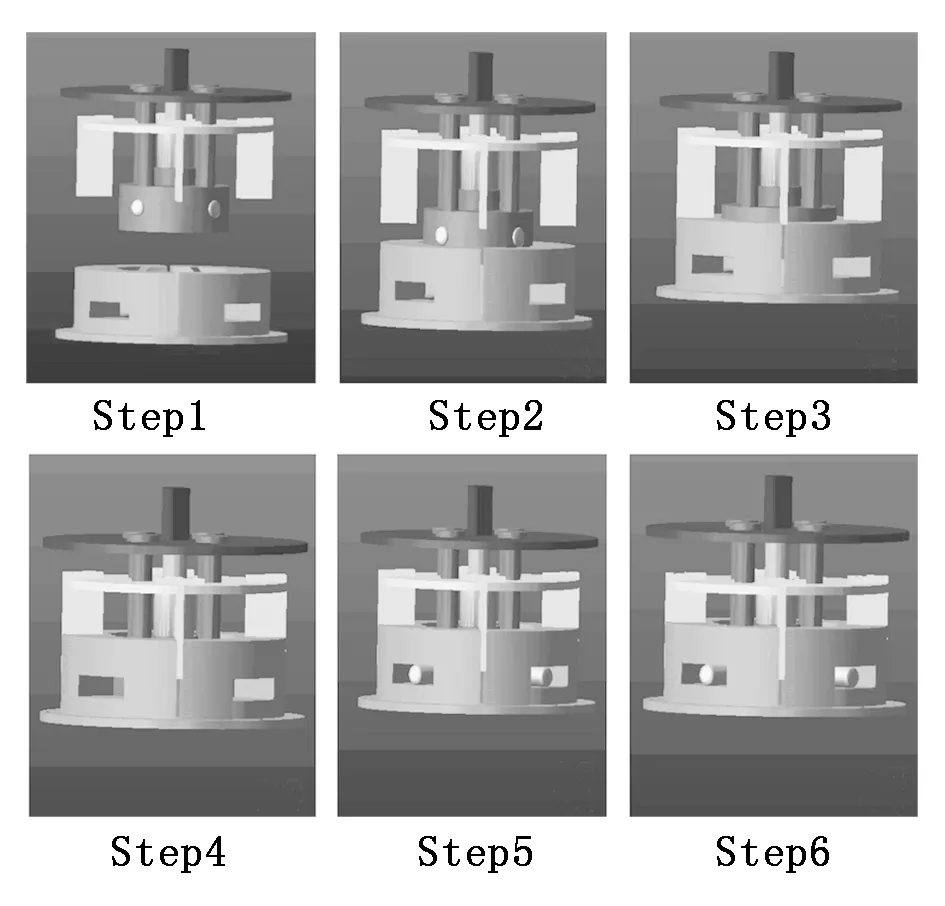
圖7 模型仿真運動
本文利用SolidWorks Simulation和ADAMS軟件對機構進行應力、應變和運動學仿真,驗證了機構設計的正確性與可行性。
5 結論
變剛度柔性關節是目前的研究熱點,我們將快速連接機構與變剛度機構融合到了同一模塊。在完成機構模塊三維模型設計的基礎上,推導了機構變剛度的調節規律,進行了材料力學的計算驗證,并在SolidWorks
Simulation平臺上對關鍵部件進行了應力、應變仿真,在ADAMS平臺上進行了動力學仿真,驗證了方案的可行性和正確性。
[1] 馬洪文,尹博,王立權,等.雙剛度彈性驅動器力學特性頻域分析[J].中國機械工程,20(9):1078-1082.
[2] Pratt G, Williamson M. Series elastic actuators[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems.[s.l.]:IEEE, 1995:1655-1660.
[3] Sensinger J W, Weir R. Unconstrained impedance control using a compact series elastic actuator[C]// Proceedings of the 2nd IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications. [s.l.]:IEEE,2006:1-6.
[4] Ronald Van Ham, Thomas G Sugar, Bram Vanderborght, et al. Compliant actuator designs[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2009:229-238.
[5] Sulzer,James S. An exotendon-driven rotary series elastic actuator for exerting joint torque[C]// Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics.[s.l.]:IEEE,2005:103-108.
[6] Chew Chee-menq, Honq Geok-soon. Design of series damper actuator[J]. Robotica, 2009,27(3):379-387.
[7] Sebastian Wolf, Oliver Eiberger, Gerd Hirzinger. The DLR FSJ: Energy based design of a variable stiffness joint[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2011:865-875.
[8] Manuel G Catalano, Giorgio Grioli, Manolo Garabio Bonomo, et al. VSA-CubeBot: a modular variable stiffness platform for multiple degrees of freedom robots[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2011:103-108.
[9] Amir Jafari, Nikos G Tsagarakis, Darwin G Caldwell. AwAS-Ⅱ: A new actuator with adjustable stiffness based on the novel principle of adaptable pivot point and variable lever ratio[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2011:462-467.
[10]Michele Mancini, Giorgio Grioli, Manuel G Catalano, et al. Passive impedance control of a multi-DOF VSA-CubeBot manipulator[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2012:382-394.
A New Rapid Connection Joint with Variable Stiffness
WANG Yun-qing, CHEN Hao, ZHANG Xu-long
(Beijing Central Department of Mechanical and Electrical Engineering Design, Beijing 100854, China)
This paper provides a rapid connection mechanism wiht variable stiffness, which is installed at the end of the designed rigid joint. Variable stiffness is used to realize flexible connection and control among joints, and rapid connection is used to increase parts assembly’s efficiency. Combination of these two functions makes the rigid joint become flexible joint. At the same time, the two functions of variable stiffness and rapid connection are integrated together to realize modularized production and use.
joint; rapid connection; variable stiffness
1672- 6413(2015)06- 0091- 03
2015- 03- 23;
2015- 09- 25
王云慶(1990-),男,四川成都人,助理工程師,碩士,從事機器人機械臂的研究工作。
TP242
A
國家863計劃(2012AA041402)
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
