模糊PID在氣墊式流漿箱控制系統中的應用
2015-12-05 09:13:23于海波
中國造紙 2015年9期
于海波
(烏海職業技術學院,內蒙古烏海,016000)
·流漿箱·
模糊PID在氣墊式流漿箱控制系統中的應用
于海波
(烏海職業技術學院,內蒙古烏海,016000)

氣墊式流漿箱存在總壓不穩定、紙漿液位波動較大等問題,是導致成紙質量不穩定的關鍵因素。本文在分析存在問題的基礎上,設計了以模糊控制理論與傳統PID控制理論相結合的模糊自適應整定PID控制的流漿箱電氣控制系統。此系統設計具有良好的動態性能和靜態性能,操作簡單,運行可靠,解決了系統存在的問題。
流漿箱;可編程控制器;模糊PID
氣墊式流漿箱作為連接漿料制備和造紙機成形部的裝置,其作用是沿著造紙機橫幅方向均勻地分布漿料,并保證上網紙漿壓力、速度、流量、濃度均勻分布,實現紙漿纖維的定向可控性和均勻性,有效分散纖維,防止纖維絮聚,保持穩定的上網壓頭和漿網速比。氣墊式流漿箱控制系統主要對紙漿液位和總壓進行PID控制[1]。但是在實際應用中,總壓和紙漿液位都不同程度地存在非線性、參數時變性和模型不確定性,所以一般的PID控制難以實現總壓和紙漿液位的精確控制。模糊控制對數學模型依賴性弱,不需要建立過程的精確數學模型。針對PID控制和模糊控制的各自特點,將模糊控制和PID控制相結合,研究模糊自適應整定PID控制,應用模糊推理,自動實現對PID參數的最佳調整,達到精確控制總壓和紙漿液位的過程控制目的。
1 氣墊式流漿箱控制系統分析和設計
1.1 氣墊式流漿箱控制系統工藝介紹
氣墊式流漿箱為雙輸入雙輸出系統,輸入量為沖漿泵輸入的漿流和羅茨風機鼓入的壓縮空氣,輸出量為上網的漿流和排出的壓縮空氣[1]。氣墊式流漿箱外觀如圖1所示。
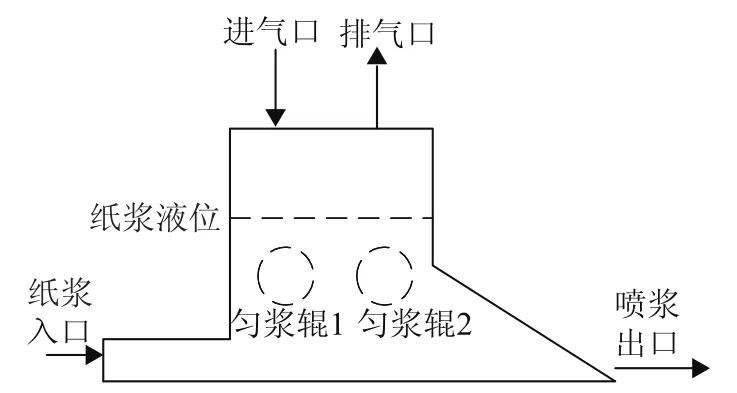
圖1 氣墊式流漿箱外觀圖
紙漿通過沖漿泵從流漿箱布漿總管流入流漿箱堰池內,進入堰池的紙漿液位高度要控制在30~45 cm,高出勻漿輥3~5 cm。在堰池內依靠勻漿輥的轉動產生微小可控的湍流,防止紙漿絮聚。羅茨風機從進氣口鼓入壓縮空氣產生氣墊壓力,紙漿在自身靜壓和氣墊壓力的作用下從唇口噴到成形網上[1]。
1.2 氣墊式流漿箱的工作機理
氣墊式流漿箱在自身靜壓和氣墊壓力的作用下,將堰池內的紙漿噴射到成形網上,其中噴漿速度由公式(1)表示。

式中,v為噴漿速度(m/s);λ為與唇口開度有關的常數;g為重力加速度常數(m/s2);p為總壓(Pa)。從式(1)可以看出,漿速與總壓的平方根成正比關系。總壓越大,噴漿的速度越高。而總壓與氣墊壓力和紙漿液位靜壓有關,其關系由公式(2)表示。

式中,P氣為氣墊壓力(Pa);H r為紙漿液位靜壓(Pa)。總壓是氣墊壓力和紙漿液位靜差之和。由式(2)可知,在氣墊壓力不變的情況下,升高紙漿液位則總壓升高;紙漿液位不變的情況下,氣墊壓力升高則總壓升高。
一般從工藝的角度來說,紙漿的流速必須與成形網的速度保持一個穩定的關系,即漿網速比恒定時,才能保證成紙的質量。漿網速比關系式由公式(3)表示。

式中,c表示漿網速比;v表示噴漿速度(m/s);ω表示網速(m/s)。根據抄紙工藝,漿網速比一般介于0.9~1.1之間。對公式(1)和公式(3)進行整理,得到總壓和網速之間的關系,見公式(4)。

在實際抄紙過程中,造紙機網速經常變化,作為系統的一種擾動,為了保持漿網速比恒定不變,對流漿箱總壓的調節就是控制系統要求的核心。通過公式(2)可知,總壓是氣墊壓力和紙漿液位靜差之和。為了調節總壓,必須對氣墊壓力和紙漿液位靜壓進行調節。羅茨風機向流漿箱體鼓入風量,保證了氣墊壓力;沖漿泵向流漿箱體輸入漿料,保證了紙漿液位。為了達到恒定的漿網速比,對總壓必須進行PID控制調節;為了保證噴漿的質量,對紙漿液位也必須進行PID控制調節[1]。在流漿箱控制系統中,對總壓和紙漿液位的控制調節是兩個關鍵技術點。
1.3 氣墊式流漿箱總體設計方案
氣墊式流漿箱控制系統設計采用西門子S7﹣300 CPU313C作為總控制器,SM331為模擬量輸入模塊,SM332為模擬量輸出模塊;DELL工控計算機作為系統上位機;變送器選用橫河川儀公司的EJA210A產品,其中壓力變送器量程0~40 kPa,液位變送器量程0~10 kPa;羅茨風機變頻器選用ABB公司ACS355系列產品;勻漿輥變頻器選用ABB公司ACS150系列產品;沖漿泵變頻器選用ABB公司ACS800系列產品。總控制器與上位機之間通信采用MPI通信方式。系統硬件總體設計圖如圖2所示。
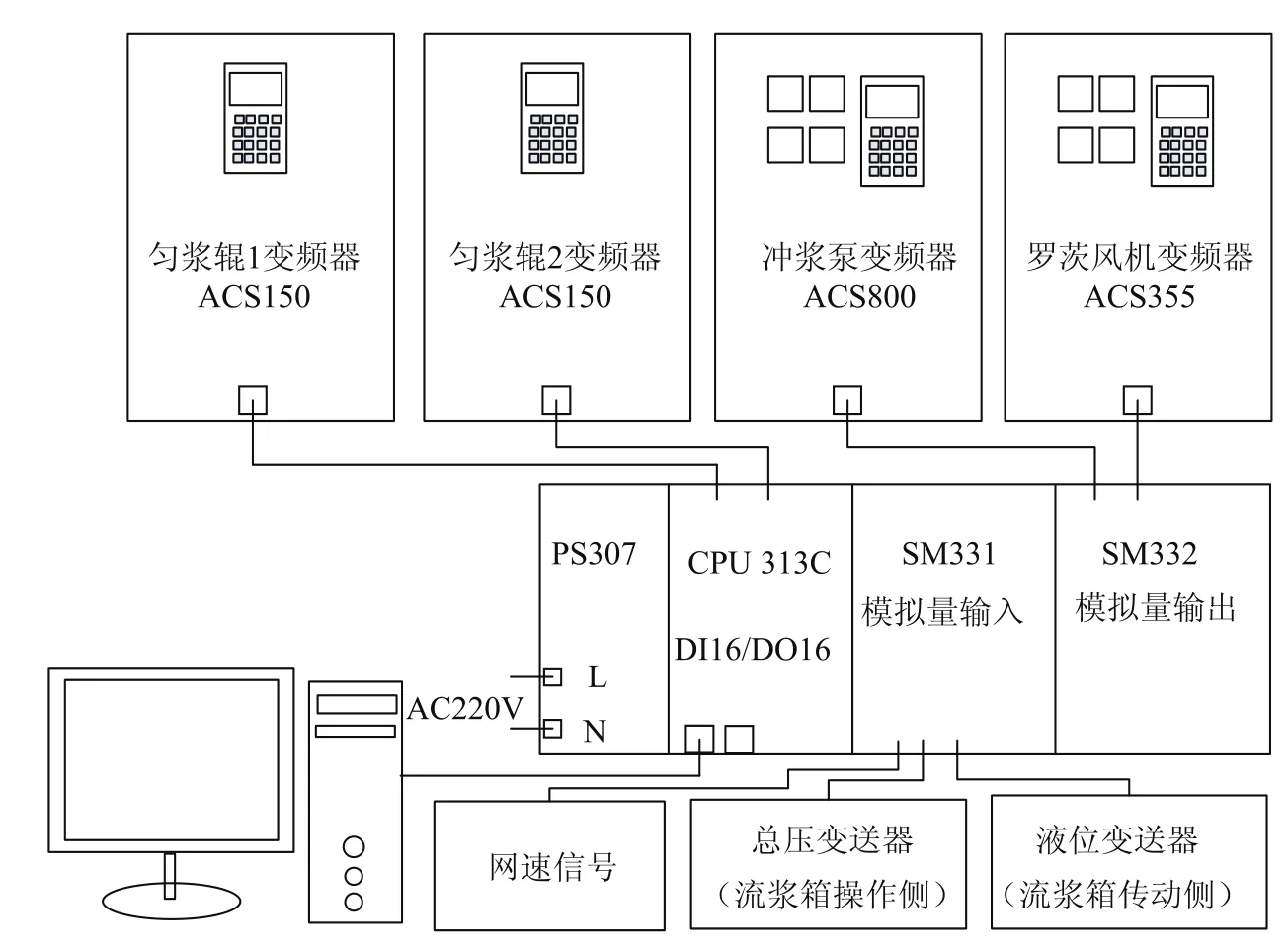
圖2 系統硬件總體設計圖
總壓變送器和紙漿液位變送器將氣墊式流漿箱的總壓信號和紙漿液位信號進行采集,變換為4~20MA電流信號傳送到模擬量輸入模塊。控制器通過上位機給定總壓設定值和紙漿液位設定值,以及系統邏輯控制命令,對總壓反饋值和液位反饋值與相應的給定值進行比較,進行模糊自適應整定PID控制計算,將計算結果進行解耦控制輸出,輸出結果通過模擬量輸出模塊傳送到沖漿泵變頻器和羅茨風機變頻器,形成閉環控制系統。系統程序控制結構圖如圖3所示。
氣墊式流漿箱的總壓控制和紙漿液位控制存在著非線性、參數時變性和模糊不確定性等因素,常規的PID控制不具有在線整定參數的能力,其控制效果不是很理想[2]。如果采用模糊推理的方法實現PID參數在線自適應功能,這不僅保持常規PID控制的特點,而且具有更大的靈活性、適應性和精確性優點。采用模糊自整定PID控制方法,解決了工程中總壓不穩定、紙漿液位不穩定的問題,成紙質量合格率得到很好的保證。
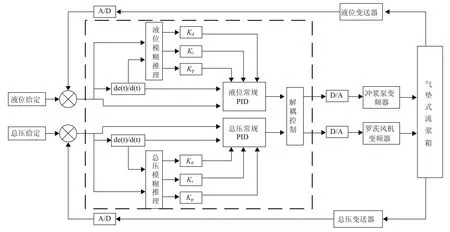
圖3 系統程序控制結構圖
2 模糊自整定PID控制的應用
用模糊控制規則對總壓和紙漿液位PID控制器參數進行在線修改,構成了總壓和紙漿液位的模糊自整定PID控制器。模糊自整定PID控制器由模糊控制器和參數可調整PID控制器兩部分組成。對模糊控制器的設計成為本系統的關鍵。由于總壓和紙漿液位的模糊自整定PID控制器較為相似,本節重點以總壓模糊自整定PID控制器作為分析。在模糊控制器中,首先將總壓PID控制器差值e(t)、差值變化率ec(t)進行模糊化處理,然后根據總壓PID控制器的三個參數與差值e(t)和差值變化率ec(t)之間的模糊關系進行模糊邏輯決策控制。以差值e(t)和差值變化率ec(t)的模糊值作為模糊控制器的輸入量,經過模糊邏輯推理算法得出總壓PID控制器的3個參數的模糊值,對這3個參數的模糊值進行去模糊化處理,得到精確的總壓PID控制器參數值,進行在線修改。
2.1 模糊化處理
首先將總壓差值e(t)、總壓差值變化率ec(t)以及總壓PID控制器的Δkp、Δki、Δkd模糊論域定義為[-3,3],此論域的模糊子集為NB(負大)、NM(負中)、NS(負小)、ZE(零)、PS(正小)、PM(正中)、PB(正大),模糊子集的隸屬函數為三角形,即NB=(-3,-3,-2),NM=(-3,-2,-1),NS=(-2,-1,0),ZE=(-1,0,1),PS=(0,1,2),PM=(1,2,3),PB=(2,3,
3),其隸屬度函數如圖4所示[2﹣3]。
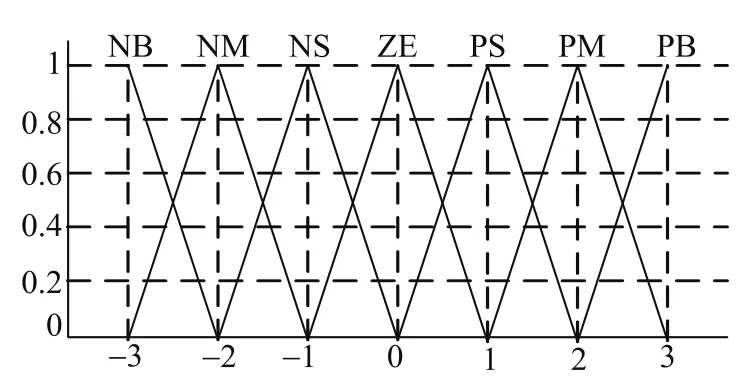
圖4 模糊數的隸屬度
將總壓模擬控制器的輸入變量從基本論域轉化為相應的模糊論域。設差值的基本論域為[-emax,emax],差值變化率的基本論域為[-ecmax,ecmax],則差值的量化因子ke及差值變化率的量化因子kec分別用公式(5)和公式(6)表示。

將模糊控制算法給出的輸出量從模糊論域轉化到相應的基本論域。設輸出量的基本論域分別是[ΔKpmax,-ΔKpmax]、[ΔKimax,-ΔKimax]、[ΔKdmax,-ΔKdmax],則輸出量的比例因子見公式(7)、公式(8)、公式(9)[2]。

2.2 模糊化控制規則的建立
模糊化控制規則設計的依據是現場實際工藝操作的經驗,將具體的經驗值建立為合適的模糊控制規則表,以總壓模糊化控制規則建立為例,當總壓差值為負值,并且差值變化率為負值,為了達到控制目的,改變總壓PID控制器的調節參數,增大比例參數值,減小積分參數值,適當減小微分參數值,使控制系統總壓反饋值快速恢復為總壓設定值,并避免系統震蕩。根據此經驗建立總壓模糊化控制規則圖見圖5~圖7。
根據總壓ΔKp、ΔKi、ΔKd模糊化控制規則圖,在程序中可將此規格圖表編寫為如下程序:ife=( ),andec=( ),thenΔK=( )。根據這些規格圖表,得到輸出量的隸屬度見公式(10)。

式中,x、y是e(t),ec(t)的條件,z是由規格圖表計算出的ΔKp、ΔKi、ΔKd模糊值[3]。
2.3 去模糊化計算處理
去模糊化計算是把經過總壓模糊化推理后得到的ΔKp、ΔKi、ΔKd模糊值轉化為精確的數值,用以修正總壓PID控制器的Kp、Ki、Kd,得到適應當前狀態的總壓PID控制器參數,并在線修改。根據總壓ΔKp、ΔKi、ΔKd的模糊化控制規則圖,用公式(11)、公式(12)、公式(13)計算求出總壓PID控制器參數的精確值。
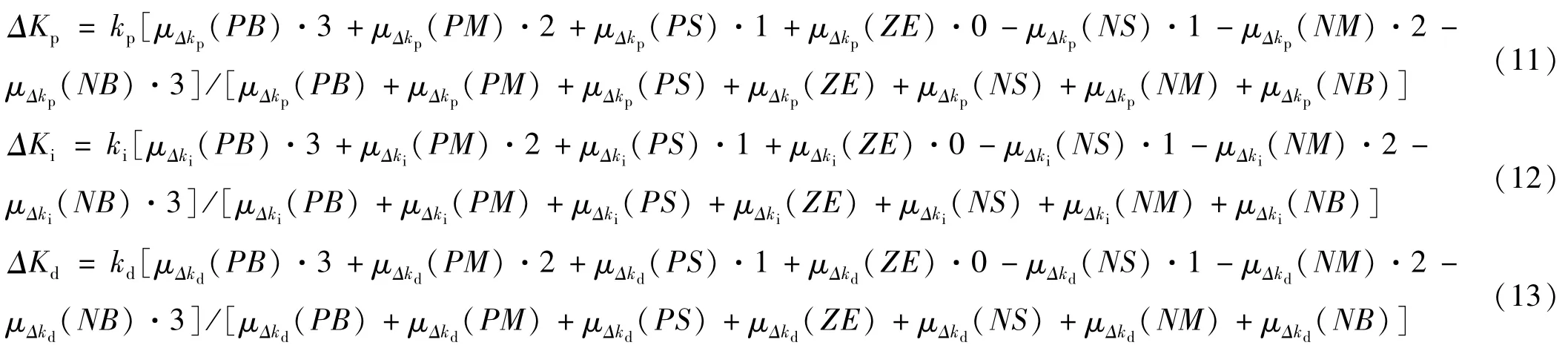
將這些精確值疊加到總壓控制器參數的設定值,得出精確控制總壓的PID參數[4﹣5]。

3 模糊自整定PID控制在程序中的設計
3.1 程序總體思路設計
根據模糊自整定PID控制原理,本控制系統程序設計思路如下:①對總壓、紙漿液位和網速信號的濾波處理、數值轉換,并與總壓設定值和紙漿液位設定值進行比較,計算各自的差值e(t)和差值變化率ec(t)。②建立模糊控制的規則數據,根據工藝經驗設定模糊控制內的具體數值。③根據去模糊化計算公式計算出ΔKp、ΔKi、ΔKd具體數值,并與上位機設定的Kp、Ki、Kd參數值疊加,得到精確的PID參數。④根據可編程控制器自帶的PID功能,將PID功能的比例、積分、微分參數設置為變量,此變量根據去模糊化計算的結果賦值,達到精確控制的目的。⑤對PID控制計算結果進行解耦控制[4﹣5]。程序設計框圖如圖8所示。
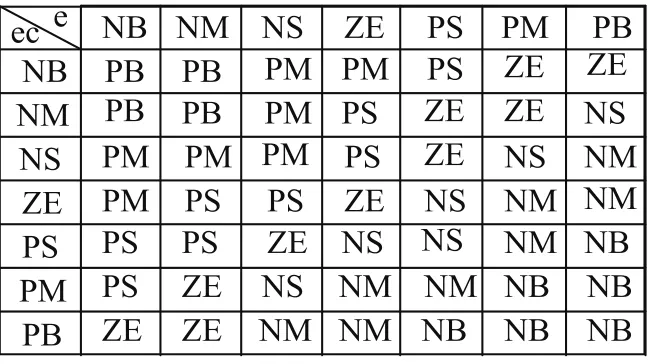
圖5 總壓ΔKp模糊化控制規則圖
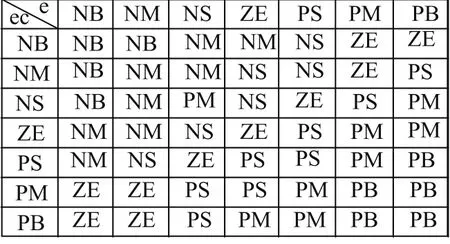
圖6 總壓ΔKi模糊化控制規則圖
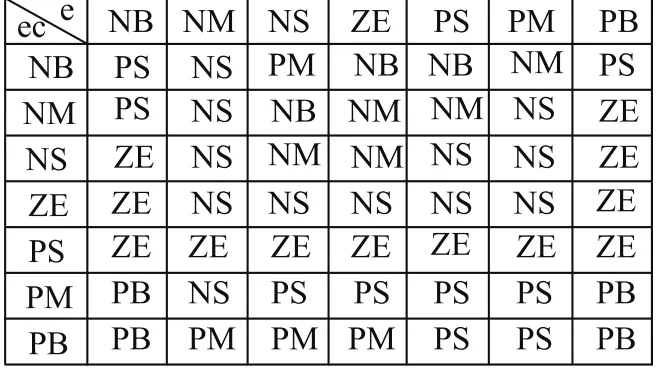
圖7 總壓ΔKd模糊化控制規則圖
3.2 模糊自整定PID程序設計方法
模糊自整定PID程序設計是氣墊式流漿箱程序設計的關鍵部分。以總壓為例,根據模糊自整定PID控制原理和程序總體設計思路,建立總壓模糊規則數據塊DB100,在數據塊DB100中根據實際工藝經驗創建總壓在各種e(t),ec(t)的條件下ΔKp、ΔKi、ΔKd的數據。在功能FC10中編寫總壓模糊化處理程序,實現ife=( ),andec=( ),thenΔKp=( ),ΔKi=( ),ΔKd=( )的數據選擇,也就是說在某種e(t),ec(t)的數值條件滿足下,根據模糊化控制規則,以查表方式選擇DB100中已經定義設置好的ΔKp、ΔKi、ΔKd數值[6]。根據公式(11)、公式(12)、公式(13)在FC10中編寫計算程序進行去模糊化計算處理,得到由模糊量轉化精確的ΔKp、ΔKi、ΔKd數值,并將數值傳送到總壓PID功能塊,與上位機設定的Kp、Ki、Kd參數疊加,得到精確的PID參數。通過調準總壓PID功能塊的Kp、Ki、Kd參數值,達到控制工藝的目的。
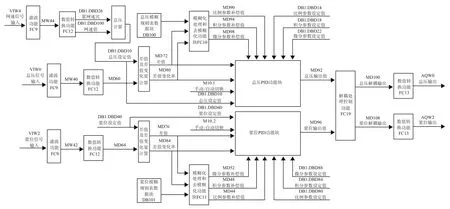
圖8 控制系統程序設計框圖
4 結 語
氣墊式流漿箱的總壓控制和紙漿液位控制是控制系統設計的關鍵,采用模糊自整定PID控制原理,根據現場具體情況,對總壓PID控制和紙漿液位PID控制的參數進行精確調整,具有良好的動態性能和靜態性能,操作簡單,運行可靠,解決了總壓波動和紙漿液位波動的問題,達到了精確控制的目的。
[1]ZhangWei﹣jiang.Researth and Improvement on Air﹣Cushion Headbox Control System[D].Xi'an:ShaanxiUniversity of Science&Technol﹣ogy,2012.張衛江.氣墊式流漿箱控制系統的研究和改進[D].西安:陜西科技大學,2012.
[2]Qi Ji﹣Yang,Meng Yang,Li Jin﹣yan,et al.Design of Constant Pres﹣sure Water﹣supply System Based on Fuzzy PID[J].Automation&In﹣strumentation,2015,30(3):44.齊繼陽,孟 洋,李金燕,等.模糊PID在恒壓供水控制系統中的應用[J].自動化與儀表,2015,30(3):44.
[3]MENG Yan﹣jing,ZHOU Bin,LIU Yuan﹣yuan.Paper Tension Control of Re﹣winder Based on Fuzzy A daptive PID[J].China Pulp&Pa﹣per,2011,30(2):41.孟彥京,周 斌,劉圓圓.基于模糊自適應PID算法的復卷機退紙輥張力控制[J].中國造紙,2011,30(2):41.
[4]ZHOU Chang﹣jian,MENG Rong﹣ai,WANG Zheng﹣shun.Fuzzy Con﹣trol for Paper Machine Electromagnetic Dryer[J].China Pulp&Pa﹣per,2011,30(11):47.周長劍,孟榮愛,王正順.紙機電磁烘缸的模糊控制[J].中國造紙,2011,30(11):47.
[5]Zuo Ting.The acquisition of Fuzzy Control Rules in the Fuzzy PID Control[D].Changchun:Northeast Normal University,2010.左 婷.模糊PID控制中模糊控制規則的獲取方法[D].長春:東北師范大學,2010.
[6]Sousa JM,Kaymak U.Model Predictive Control Using Fuzzy DECI﹣SION Functions[J].IEEE Tran.SMC,2001,Part B:31(1):22.CPP
(責任編輯:馬 忻)
App lication of Fuzzy PID in Air﹣cushioned Headbox Control System
YU Hai﹣bo
(Wuhai Vocational&Technical College,Wuhai,Innet Mongolia Autonomous Region,016000)(E﹣mail:yuhaibowh@sina.com)
Instability of total pressure and fluctuation of the stock level in air﹣cushioned headbox are the key factors causing poor quality of paper product.On the basis of analyzing the problems and combining the theory of fuzzy controland traditional PID control theory fuzzy adap﹣tive setting PID control headbox electric control system was designed.The system had good dynamic performance and static performance,easy and reliable operation,it solved the existing problems of the system.
headbox;PLC;fuzzy PID
于海波先生,碩士,講師;主要研究方向:機械制造及其自動化技術、自動控制系統。
TP276
A
0254﹣508X(2015)09﹣0055﹣05
2015﹣07﹣03(修改稿)
