橋上列車移動荷載參數自動識別系統試驗
2015-12-03 12:20:50虞婷婷瞿偉廉
噪聲與振動控制 2015年2期
王 儀,虞婷婷,瞿偉廉
(1.河南城建學院,河南 平頂山 467036; 2.武漢理工大學,武漢 430070)
橋上列車移動荷載參數自動識別系統試驗
王 儀1,虞婷婷1,瞿偉廉2
(1.河南城建學院,河南 平頂山 467036; 2.武漢理工大學,武漢 430070)
提出了一種用于列車移動荷載參數自動識別的系統,并制作了等截面簡支鋼梁和試驗列車模型進行試驗研究。利用基于圖像處理技術的橋梁動態位移采集系統,獲取模型橋梁測點位置的動態位移響應,同時利用自行設計的列車模型參數采集系統獲取列車模型的移動速度、輪軸個數和軸間距,最后采用橋梁列車多軸移動荷載識別系統識別出列車軸重荷載值。通過對不同移動速度、不同測點個數下列車參數識別效果的分析,驗證了本文所述列車移動荷載參數自動識別系統的可行性和準確性,為今后荷載識別系統的實際應用做好準備。
振動與波;列車參數識別;簡支梁;模型試驗;圖像處理技術
橋梁結構在動態荷載作用下的反應和破壞比例是在靜態荷載作用下的2到4倍[1],鐵路橋梁列車荷載質量大、速度快,因此準確獲得經過橋梁的列車荷載大小成為鐵路橋梁在使用和維護過程中首先需要解決的關鍵問題。
自從1988年0'Connor和Chen[2]提出利用橋梁的響應間接的計算車輛的動態荷載的解析法以來,移動荷載的識別理論逐步趨于完善,經歷了由反向識別方法到正向識別方法的漫長發展過程[3-8],荷載識別的精度不斷提高,可以識別的荷載個數不斷增加。2000年后,余嶺和Chan等人對橋梁結構移動荷載識別進行系統研究,分別采用解析法I、解析法II、時域法和頻時域法這四種常用的荷載識別方法進行理論與試驗的對比分析,提出了針對橋梁結構移動荷載識別的系統理論(MFIS),指出了各種識別方法的優缺點及適定性[9-11]。2004年S S Law等人采用基于有限元方法和凝聚技術,進行了數值分析和試驗研究,識別了車輛與橋梁之間相互作用力,并對采樣頻率、移動速度等參數的影響進行討論[12],之后在2008年[13]提出了采用小波分析的方法結合有限元技術進行移動荷載識別。以上研究取得了豐富的科研成果,但是前提都是在已經獲知荷載移動速度、荷載個數和荷載軸間距的情況下進行的荷載識別,而實際的車輛在經過橋梁時的移動速度、荷載個數和軸間距都是未知之量,因此先前的列車荷載識別方法離實際應用還有一定的距離。
為此本文提出了列車多軸移動荷載參數自動識別系統,利用基于圖像處理的橋梁動態位移采集系統,獲取橋梁測點位置的動態位移響應時間歷程;利用自行研制的列車參數采集系統獲取列車荷載的移動速度、輪軸個數和軸間距;最后采用多軸移動荷載識別系統識別出列車軸重荷載值。為驗證本方法的可行性,特制作了等截面簡支鋼梁模型和試驗列車模型。通過對不同移動速度、不同測點個數下列車參數識別效果的分析,驗證了本文所述列車荷載參數自動識別系統的有效性和正確性,為今后列車荷載識別系統的實際應用做好準備。
1 模型制作
1.1 單跨等截面簡支鋼梁模型
橋梁模型總體包括主梁、導梁和尾梁三部分,三者均選用鋼材制作,材料屬性和尺寸見表1。

表1 主梁、導梁和尾梁材料尺寸表
主梁簡支,導梁和尾梁分別用以列車模型駛入橋梁之前加速過程和駛出橋梁之后減速之用,列車模型由可調速的馬達經繩索牽引勻速行駛。測點均勻布置于橋梁L/4,L/2,3L/4位置,如圖1所示。

圖1 橋梁列車試驗模型
1.2 列車與軌道模型
為了能更好的模擬列車荷載通過橋梁時的結構響應情況,參考實際鐵路系統列車與軌道配合方式,軌道由兩根鋼條及與其相連的枕木構成,枕木等間距均勻布置于導軌下面;模型小車車輪外緣凸出與軌道進行配合,防止小車出軌并使其延導軌方向行駛;每節車廂有前后兩個輪軸,每個輪軸兩端分別安裝一個車輪,如圖2所示。
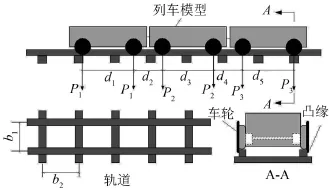
圖2 列車模型與軌道
列車模型的基本設計參數如表2所示。
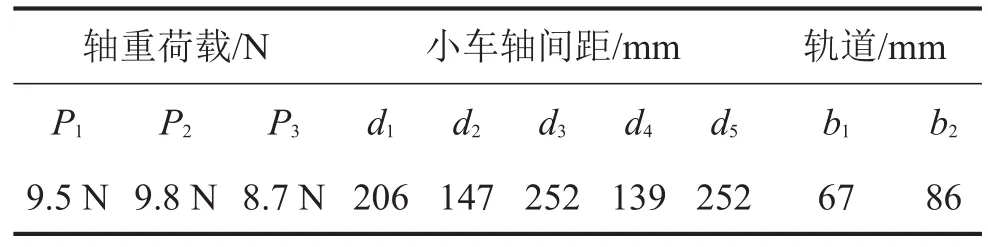
表2 小車與軌道模型參數
2 列車移動荷載參數自動識別系統
本系統主要包括以下三個子系統:橋梁動態位移采集系統、列車參數采集系統和多軸移動荷載識別系統。如圖3所示。
圖3 列車多軸移動荷載識別系統
在列車駛過橋梁的過程中,由橋梁動態位移采集系統測量并記錄下橋梁在列車荷載作用下測點位置的位移時間歷程,由列車參數采集系統識別出經過橋梁的列車速度、輪軸的個數和軸間距,之后將上述位移時間歷程和列車各參數作為輸入參量,經過多軸移動荷載識別系統識別出通過橋梁的列車軸重荷載大小。
2.1 橋梁動態位移采集系統
橋梁動態位移采集系統是一種基于數字圖像處理技術的結構位移監測方法,鑒于數字圖像處理技術具有非接觸、全場測量和高精度三大特點,該系統的實際應用已經取得豐碩的成果[14,15]。在使用過程中,首先將目標板分別固定于待測結構所需位置,要求目標板的X-Y坐標軸與測點所在的工程坐標系的X-Y坐標軸平行;然后將采集鏡頭放置于固定不動的點上,攝像機的主光軸可以任意角度擺放,只要攝像機能夠攝取目標板上的像即可,經過中央控制主機的軟件處理即可獲得測點位置位移響應時程。本試驗采集系統3塊目標板分別布置于簡支梁橋L/4(S1),L/2(S2)和3L/4(S3)節點位置,橋梁坐標系的X-Y軸為簡支梁的“縱—豎”方向,系統布置如圖4所示。
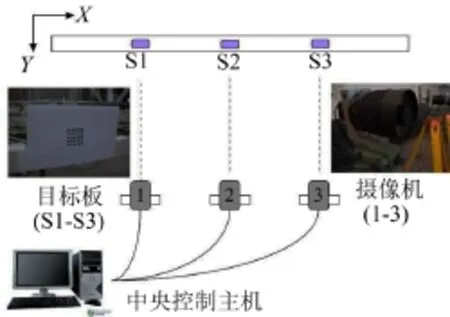
圖4 動態位移采集系統
2.2 列車參數采集系統
為了識別經過橋梁的列車軸重荷載大小,除了需要獲取橋梁結構位移響應之外,還需要獲取列車移動速度、輪軸個數和軸間距等參數信息,以供在荷載識別過程之用。針對此問題,特設計制作了列車參數采集系統,其設備構成如圖5所示。

圖5 列車參數采集系統
分別將兩個光電傳感器p1、p2固定于橋梁之上,并使其保持一定的間距D,當列車勻速經過橋梁時,記錄下列車駛過兩個光電傳感器間距所需要的時間ΔT,則列車行駛速度V可表示為

接近開關b可以根據其檢測范圍固定于軌道兩側或下方,此處固定于軌道側面,當列車輪軸經過時就可以獲取感應信號,首先根據感應到的信號次數判斷經過的列車輪軸的個數,其次根據感應信號間的時間差和之前獲得的列車行駛速度V,計算列車每個輪軸之間的軸間距,即

這些過程都可以通過可編程控制器(PLC)獲取信號,然后由電腦后處理軟件處理完成。
2.3 多軸移動荷載識別系統
將由動態位移采集系統獲得的橋梁位移響應和列車參數采集系統獲得的列車參數作為輸入數據,利用模擬退火遺傳算法對列車荷載進行識別[8],從而獲得列車軸重荷載的大小,其操作過程如圖6所示。

圖6 多軸移動荷載識別系統
模擬退火遺傳算法以預設測點位置實際橋梁位移響應與計算位移響應差值作為目標函數,通過不斷縮小該差值來獲取全局最優解,目標函數如式(3)所示

其中Objectk(j)表示k代第j個個體的目標值和適應度值和分別表示k代第j個個體第n個測點實際位移響應和計算位移響應,‖·‖表示向量的范數。
t時刻、任意位置x處的橋梁動態位移v(x ,t)可以通過求解橋梁振動微分方程獲得
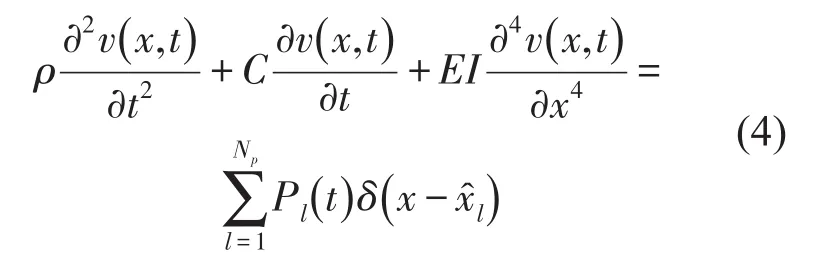
其中,截面抗彎剛度為EI,單位長度質量為ρ,粘滯阻尼C,v(x,t)為t時刻、位置x處的梁的撓度,為迪拉克函數為t時刻第l個荷載到橋頭的距離。
根據模態振型疊加法將撓度v(x,t)表示為

式中i為振型階數,φi(x)為第i階模態振型函數,qi(t)為第i階模態坐標。
將方程(5)代入方程(4),利用振型正交性化簡方程,并對得到的方程對x從0到L積分,注意到邊界條件和迪拉克函數的性質,可以得到
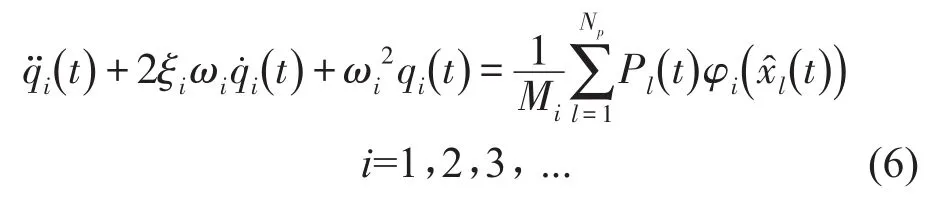
式中ωi為第i階模態頻率;ξi為第i階模態阻尼比,為第i階模態質量。
3 試驗結果分析
誤差分析采用識別值與測量值之間的范數相對百分比誤差Error對識別精度進行描述,如式7所示

式中xi為識別值向量,xt為測量值向量,‖·‖表示對向量取范數。
采用本文所述列車移動荷載參數自動識別系統,分別進行三次列車過橋試驗,獲得的三組測點位移響應時程曲線如圖7所示。
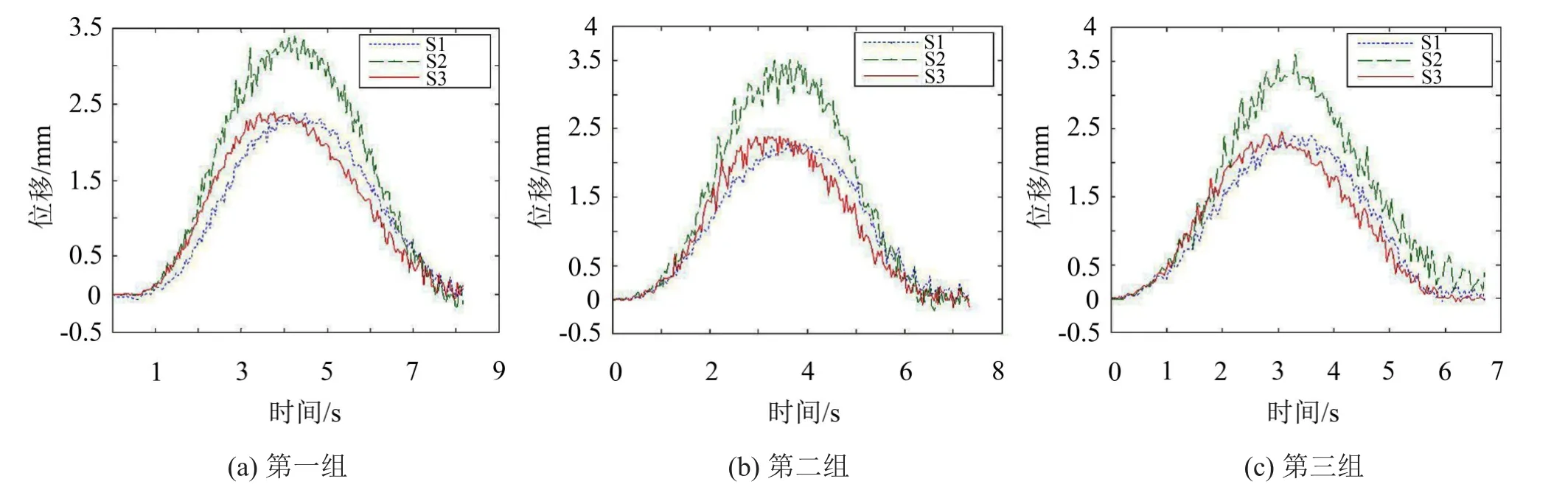
圖7 測點位移響應時程曲線
識別得到的輪軸荷載個數、小車移動速度和軸間距誤差見表3所示。
由表3可以看出,三組試驗工況下,采用本文所述參數識別方法可以獲取列車移動速度,準確識別輪軸個數,軸間距識別誤差變化不大,最大值為4.01%,滿足工程需要。

表3 列車參數識別結果分析
采用matlab自帶低通濾波器對橋梁響應進行濾波,然后進行軸重荷載識別得到在不同移動速度、不同測點個數情況下,3節車廂6個荷載的軸重荷載識別誤差值見表4。
由表4不難發現三組試驗工況下,輪軸荷載識別誤差波動不大且均在可接受范圍之內,最大識別誤差為第三組單測點的10.18%,隨著測點個數的增加荷載識別的誤差值逐漸下降,識別精度逐步提高,說明增加測點個數可以增加識別結果的準確性,并且為增加識別可靠性應避免采用單測點進行信號采集。
4 結語
建立了等截面簡支鋼梁橋模型和列車與軌道模型。采用基于圖像處理技術的橋梁動態位移采集系統測量列車經過橋梁時的預設測點位移響應時程,利用列車參數采集系統,識別列車移動速度、輪軸個數和軸間距等參數信息,最后利用多軸移動荷載識別系統進行列車軸重荷載的識別。通過列車過橋的模型試驗和參數討論,驗證了本文所述列車參數識別系統的有效性和正確性;可以實現對于輪軸個數和移動速度的識別,并且能夠獲得可以接受的軸間距和軸重荷載識別精度。
在實際應用方面,列車過橋過程中,基本以低速勻速通過,利用該系統更加容易獲取列車運行速度、輪軸個數和軸間距等參數,對于提高軸重荷載的識別精度會更有幫助;采用CCD圖像處理技術,本系統位移監測距離可以達到300 m甚至更遠,可以方便獲取實際橋梁測點位移響應時程,為今后該系統的實際應用做好準備。

表4 不同測點個數情況下的荷載識別誤差值
[1]Cebon D.Assessment of the dynamic wheel forces generated by heavy road vehicles[C].Symposium on Heavy Vehicle Suspension and Characteristics,Australian Road Research Board,1987.199-212.
[2]Connor O,Chan T H T.Dynamic wheel loads from bridge strains[J].ASCE Journal of Structural Engineering, 1988,114:1703-1723.
[3]袁向榮,陳恩利,Chan T H T.由響應識別橋上移動荷載[J].工程力學,1997,14(4):89-97.
[4]李忠獻,陳鋒.基于梁格法的橋梁移動荷載識別[J].土木工程學報,2006,39(12):83-87.
[5]袁向榮.梁振動響應曲線滑動擬合法及在移動荷載識別中的應用[J].噪聲與振動控制,2006,(3):42-43.
[6]余 嶺,朱軍華,陳敏中,等.基于矩量法的橋梁移動車載識別試驗研究[J].振動與沖擊,2007,26(1):16-20.
[7]瞿偉廉,王儀.根據響應識別橋上列車荷載的模糊模式識別方法[J].噪聲與振動控制,2010,31(1):86-89.
[8]Qu Wei-lian,Wang Yi,Pi Yong-lin.Multi-axle moving train loads identification on simply supported bridge by using simulated annealing genetic algorithm[J].International Journal of Structural Stability and Dynamics,2011, 11(1):57-71.
[9]Chan T H T,YU Ling,Law S S,et al.Moving force identification studies I:Theory[J].Journal of Sound and Vibration,2001,247(1):59-76.
[10]Chan T H T,YU Ling,Law S S,et al.Moving force identification studies II:Comparative studies[J],Journal of Sound and Vibration,2001,247(1):77-95.
[11]YU Ling,Chan T H T.Recent research on identification of moving loads on bridges[J].Journal of Sound and Vibration,2007,305:3-21.
[12]Law S S,BU J Q,Zhu X Q,et al.Vehicle axle loads identification using finite element method[J].Engineering Structures,2004,26:1143-1153.
[13]Law S S,WU S Q,SHI Z Y.Moving load and prestress identification using wavelet-based method[J].Journal of Applied Mechanics,2008,75:021014-1-021014-7.
[14]羅洪斌,趙文光,文銀平,等.CCD圖像監測系統應用于橋梁結構檢測[J].華中科技大學學報(城市科學版), 2006,23(S1):91-93.
[15]LI Peng-hui,ZHAO Wen-guang,WEN Yin-ping,et al. Application of digital image monitoring system to detecting a high voltage icing conductor[J].Geo-spatial Information Science,2009,12(1):61-65.
Experimental Study onAutomatic Identification of Moving Train Load Parameters of Bridges
WANG Yi1,YU Ting-ting1,QU Wei-lian2
(1.Henan University of Urban Construction,Pingdingshan 467036,Henan China; 2.Wuhan University of Technology,Wuhan 430070,China)
A new system for moving-train load-parameters identification was presented and experimentally studied based on a simply supported steel beam with constant cross-sections subjected to moving train loads.The dynamic displacement responses at the measurement points of the bridge were simultaneously measured by using the displacement image-processing monitoring system.Basic parameters of the model train,including moving speed,axle number and axle spacing, were identified with a parameter acquisition system.Finally,the moving train loads were identified by using multi-axle moving-loads identification system.Effects of parameters identification for different moving speeds and measurement points of the proposed system were investigated.The feasibility and accuracy of this system for moving-train load parameters identification were verified.This work may provide a base for practical application of the load identification system.
vibration and wave;train load parameters identification;simply supported beam;model experiment;image processing technique
TU3
A
10.3969/j.issn.1006-1335.2015.02.025
1006-1355(2015)02-0107-05
2014-04-11
河南省教育廳項目(12B560002);國家高技術863計劃項目(2007AA11Z119)
王儀(1983-),男,河南舞鋼人,博士,主要研究方向:結構健康監測與振動控制。E-mail:wangy@hncj.edu.cn
瞿偉廉(1946-),男,博士生導師,主要研究領域:結構防災減災。E-mail:qwlian@sina.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國公路(2017年11期)2017-07-31 17:56:30
中國公路(2017年10期)2017-07-21 14:02:37